基于多轴机械臂的髋臼旋转截骨手术机器人
2021-07-07吴炳坚朱振中潘昕荻
□ 吴炳坚 □ 朱振中 □ 潘昕荻
1.上海电气集团股份有限公司 中央研究院 上海 200070 2.上海市第六人民医院 上海 200223
1 设计背景
先天髋关节发育不良在儿童、青少年及成人中引起疼痛、行走困难、严重畸形,甚至会引发残疾问题。越来越多的医生倾向于做保髋手术,而不是进行人工关节置换,原因在于后者会使患者面临多次人工关节翻修。临床上,目前常实施的保髋手术为髋臼周围截骨术[1-2]。
髋臼周围截骨术如图1所示,在髋臼周围进行多边形截骨,将髋臼从周围的骨盆中分离出来。截取的髋臼可大幅度移动,使股骨头的覆盖得到较大程度矫正。这种手术开创大,术中出现大出血及重要神经损伤的风险极高,术后骨不愈合及畸形矫正丢失等并发症多。由于手术难度和风险都非常大,因此目前在国内也仅有部分骨科医院经验丰富的医生才能开展髋臼周围截骨术。

▲图1 髋臼周围截骨术
针对髋臼周围截骨术的弊端,笔者设计了一种基于多轴机械臂的髋臼旋转截骨手术机器人,使用一把特殊的球形摆锯,借助机械臂、光学导航定位、计算机断层扫描三维影像重构等技术,将髋臼呈球形完全离断,使带着软骨面的髋臼能自由移动到合适的和股骨头匹配的位置,整个过程可以形象地认为是在挖一个冰激凌球。
2 髋臼旋转截骨术临床难点
进行髋臼旋转截骨术,需要将髋臼呈球形完全离断,如图2所示。这类手术具有微创、开口小、远离重要神经、增大髋关节接触面积、提高股骨头稳定性、改善髋臼生物力学、后遗症少、恢复快等特点。

▲图2 髋臼旋转截骨术
手工进行髋臼旋转截骨术如图3所示。医生在手工进行髋臼旋转截骨术时,采用骨科球形摆锯截骨,存在以下临床难点[3-5]:

▲图3 手工进行髋臼旋转截骨术
(1) 由于髋关节表面不规则,骨头硬度高,用球形摆锯切割髋臼时受到应力分布不均匀和摆锯自身振动影响,会产生剧烈振动,导致医生手工把握摆锯不稳,使摆锯中心移动;
(2) 球形摆锯旋转中心点是一个位于摆锯实体以外虚拟的点,切割时无法通过人眼和其它机械工具实时精确测量出摆锯旋转中心点在世界坐标系中的位置,造成切割点位不精确;
(3) 医生术前规划切割髋臼时,要挖出完整球形髋臼,还需要使手术球心规划点位于髋臼内部,但是髋臼外围是骨头硬物,医生使用球形摆锯无法直接将摆锯旋转中心点移至规划位置;
(4) 球形摆锯切割髋臼时,分解为多个不同的圆球面来进行切割,没有精确的坐标体系,会造成多个切割面不连续,需要增加切割次数来修复不连续面,造成手术难度增大。
3 髋臼旋转截骨手术机器人结构
髋臼旋转截骨手术机器人如图4所示,不仅能解决髋臼旋转截骨术临床难点,而且能实时提供亚毫米级髋臼周围坐标和机械臂末端位姿信息。由计算机辅助诊断系统提供计算机断层扫描图像的三维显示,可以为医生提供更精细的骨盆和髋臼三维结构信息,术前规划更为直观、快捷、有效。

▲图4 髋臼旋转截骨手术机器人
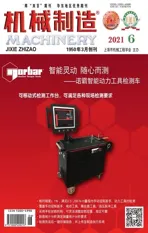
髋臼旋转截骨手术机器人各子系统模块的关系如图5所示。
▲图5 髋臼旋转截骨手术机器人子系统模块关系
主控制器通过以太网连接可编程序控制器、机械臂、光学定位器,可编程序控制器也与机械臂通过以太网相连,用于两者之间的信息交互。
4 运行流程
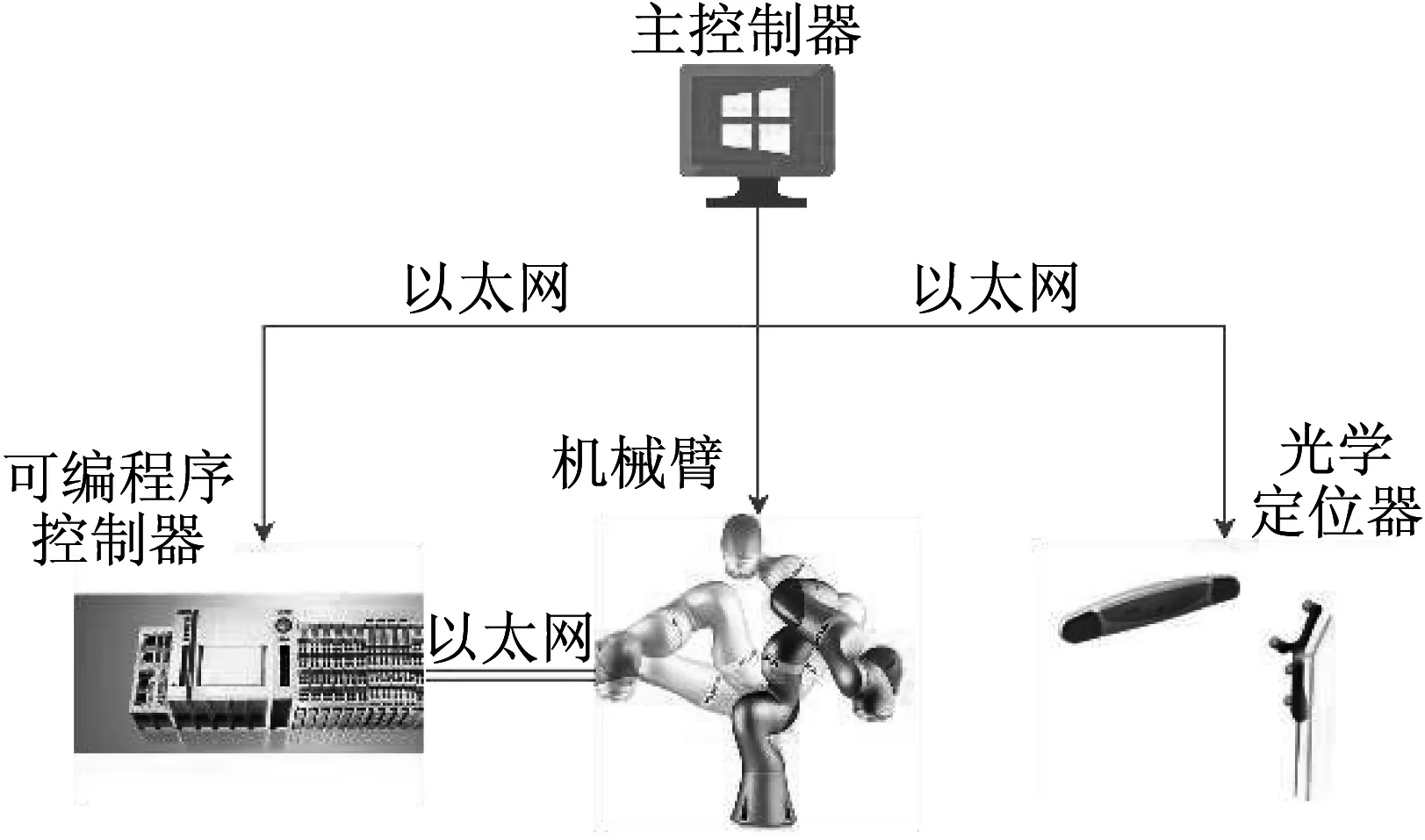
髋臼旋转截骨手术机器人运行流程如图6所示。
▲图6 髋臼旋转截骨手术机器人运行流程
(1) 球形摆锯与机械臂进行光学导航标定。
(2) 对计算机断层扫描影像进行滤波、分割处理,采用面绘制法还原三维几何模型的外表面,采用体绘制法对每个体素进行处理,设置每个数据点的颜色和不透明度,最终在屏幕上构造出图像的三维几何模型。
(3) 通过光学导航对病人髋臼进行标定,建立以光学导航为坐标系的髋臼配准,由计算机辅助系统计算出髋臼切割中心点。
(4) 医生进行手术规划,选择摆锯半径,评估血管是否产生干扰。
(5) 光学导航引导机械臂至球形截骨点,计算机辅助系统控制机械臂进行髋臼截骨。
5 球形摆锯与机械臂标定
5.1 原理
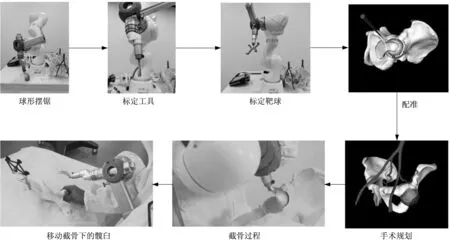
如图7所示,球形摆锯的旋转中心点在中轴线上,位于ρ点,位置和姿态都无法直接标定。图7中,R为摆锯半径,α为摆锯角度。
▲图7 球形摆锯旋转中心点
笔者设计的球形摆锯和标定工具使用金属三维打印工艺,使标定工具和球形摆锯的安装底座精确保持一致,使标定工具O点与球形摆锯旋转中心点精确保持一致,如图8所示。图8中,O、J、K为标定工具的三个尖点,-X、Y、P为方向设定。
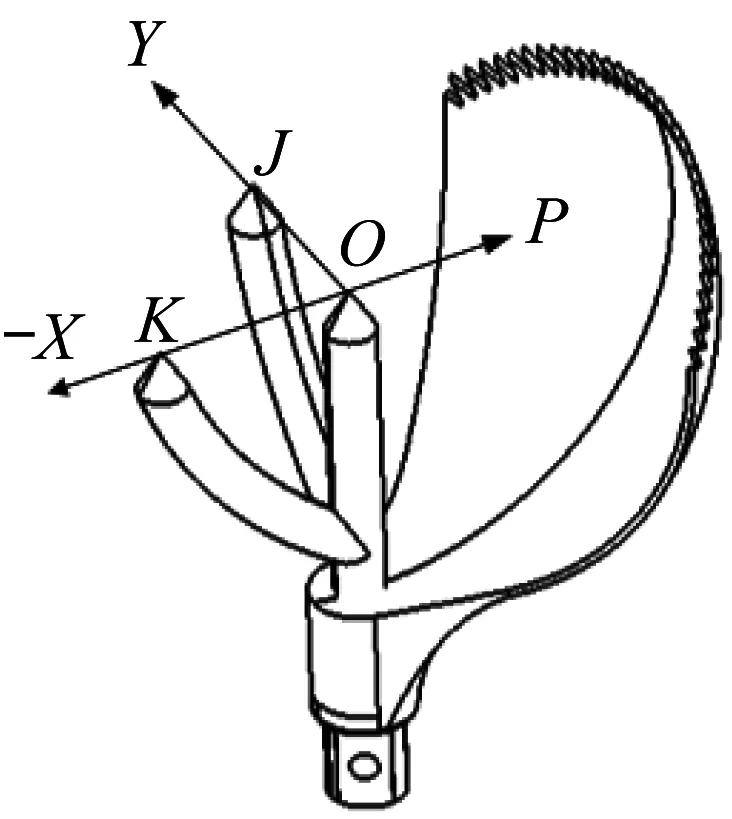
▲图8 标定工具与球形摆锯关系
设OP方向为标定球形摆锯的X轴方向,OK方向为标定球形摆锯的-X轴方向,OJ方向为标定球形摆锯的Y轴方向,-X轴与Y轴之间夹角为90°,根据右手准则可以确定球形摆锯旋转中心点空间运动的Z轴方向。
通过机械臂示教运动至不同姿态,读取笛卡尔坐标,再经过矩阵方程推导,可以标定出球形摆锯相对于机械臂法兰盘的位姿。
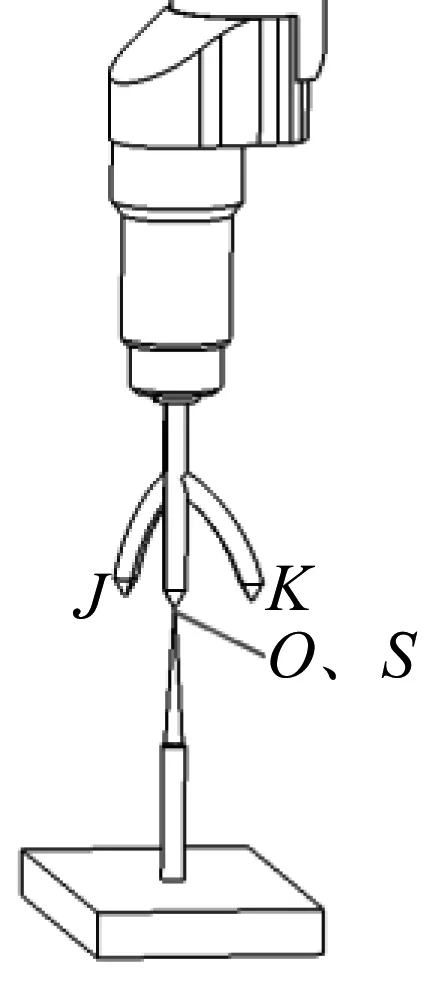
5.2 位置标定
在机器人运动空间内选择一个精确的固定参考点S,移动机械臂,选取机械臂关节差异较大的四种姿态。安装标定工具后,O点与S点重合,如图9所示,得到机械臂法兰盘中心相对于机械臂基坐标系的旋转矩阵T1、T2、T3、T4。另一方面,机械臂法兰盘中心相对于机械臂基坐标系的位置不变,由此可以得到等式:
TBFi×TFTi=TTB
(1)
▲图9 位置标定示意图
式中:TBFi为机械臂基坐标系至机械臂法兰盘坐标系的第i个变换矩阵;TFTi为机械臂法兰盘坐标系至标定工具末端坐标系的第i个变换矩阵;TTB为标定工具末端坐标系至机械臂基坐标系的变换矩阵;i为1、2、3、4。
由齐次方程可得:
(2)
式中:RBFi为机械臂基坐标系至机械臂法兰盘坐标系的第i个旋转矩阵;PBFi为机械臂基坐标系至机械臂法兰盘坐标系的第i个位置矢量;RFTi为机械臂法兰盘坐标系至标定工具末端坐标系的第i个旋转矩阵;PFTi为机械臂法兰盘坐标系至标定工具末端坐标系的第i个位置矢量;RTB为标定工具末端坐标系至机械臂基坐标系的旋转矩阵;PTCP为标定工具末端坐标系至机械臂基坐标系的位置矢量。
分解式(2)最后一列,可得:
RBFi×PFTi+PBFi=PTCP
(3)
四种姿态移动空间位置不变,则PTCP为恒值,机械臂法兰盘与标定工具相对位置在安装时决定,相对位置也不动,于是RFTi、PFTi都为固定值,有:
RBF1×PFT1+PBF1=RBF2×PFT2+PBF2
=RBF3×PFT3+PBF3
=RBF4×PFT4+PBF4
(4)
整理式(4),得矩阵形式:
(5)
通过机械臂运动学参数求运动学反解,可以得到RBFi、PBFi。使用最小二乘法,可以计算得到机械臂法兰盘坐标系到标定工具末端坐标系的位置矢量,即球形摆锯旋转中心点的位置矢量PFT。
5.3 姿态标定
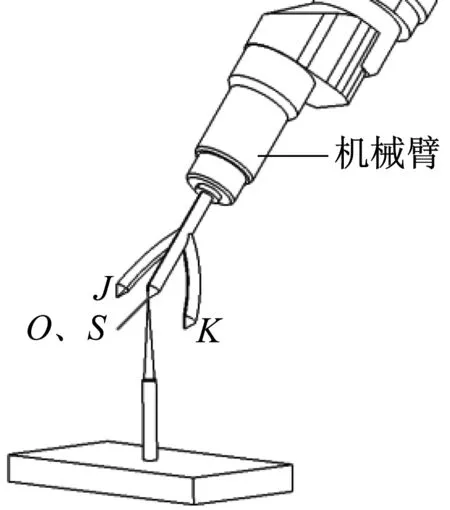
如图10所示,在机械臂运动空间内选择一个固定参考点S,移动机械臂,使O点垂直于S点。不改变机械臂末端的旋转姿态,只平移机械臂,使J点垂直重合于S点,记录标定工具中心点笛卡尔空间坐标。使K点垂直重合于S点,记录标定工具中心点笛卡尔空间坐标。
▲图10 姿态标定示意图
由于不改变机械臂末端的旋转姿态,O、J、K三点的RTB、RFT、PFT相同。RFT为机械臂法兰盘坐标系至标定工具末端坐标系的旋转矩阵。
引入与位置标定相同的公式,有:
RBFn×PFTn+PBFn=PTCPn
(6)
式中:RBFn为机械臂基坐标系至机械臂法兰盘坐标系在n点的旋转矩阵;PFTn为机械臂法兰盘坐标系至标定工具末端坐标系在n点的位置矢量;PBFn为机械臂基坐标系至机械臂法兰盘坐标系在n点的位置矢量;PTCPn为标定工具末端坐标系至机械臂基坐标系在n点的位置矢量;n为O、J、K。
可以得出X轴向量为:
X=PTCPK-PTCPO
=RBFK×PFT-RBFO×PFT+PBFK-PBFO
(7)
Y轴向量为:
Y=PTCPJ-PTCPO
=RBFJ×PFT-RBFO×PFT+PBFJ-PBFO
(8)
对X轴向量、Y轴向量进行归一化,可得X′、Y′,根据右手准则,可推出Z′。标定工具末端坐标系至机械臂基坐标系的旋转矩阵RTB为:
RTB=[X′Y′Z′]
(9)

通过位置标定和姿态标定,可以得出球形摆锯相对于机械臂法兰盘的空间位姿关系矩阵。机械臂至机械臂法兰盘的位姿矩阵可由机械臂自带软件计算出,这样就可以推算出机械臂至球形摆锯的位姿坐标。
6 摆锯旋转中心点手眼标定
在标定球形摆锯相对机械臂的转移矩阵后,计算机辅助系统会标定出髋臼截骨的中心点。两个中心点处于不同坐标系下,笔者以光学导航为基准建立同一坐标系,这样才能使用光学导航坐标引导机械臂末端摆锯旋转中心点至髋臼切割中心点。
机械臂、标定靶球、光学导航关系如图11所示,这一模式为手眼标定中的眼在外模式。在这种关系下,机械臂多次运动后,机械臂末端和标定靶球的位姿关系始终不变。
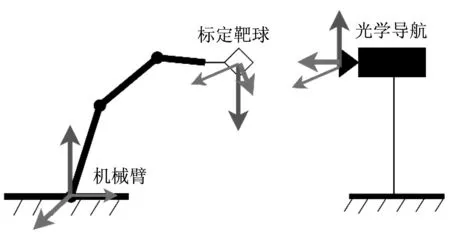
▲图11 机械臂、标定靶球、光学导航关系
Tsai等[6]将手眼标定的方程归结为:
AC=CB
(10)
式中:A为机械臂末端变换位姿后相对于机械臂的相对运动矩阵;B为标定靶球与光学导航的相对运动矩阵;C为待求的光学导航到机械臂末端的变换矩阵,也称为手眼变换矩阵。
求解C的方法分为非线性和线性两种。非线性方法的实现要求相对较高[7],实现相对复杂,实用性较弱,在实际使用中很少见。线性方法以两步法、数学法求解方程[8-10]。
笔者采用两步法求解手眼变换矩阵,这一方法标定精度高,而且医生临床操作简单。
两步法引入旋转轴、旋转角系统来描述旋转运动,对旋转矩阵和平移向量分别进行求解。求解手眼标定方程流程如图12所示。
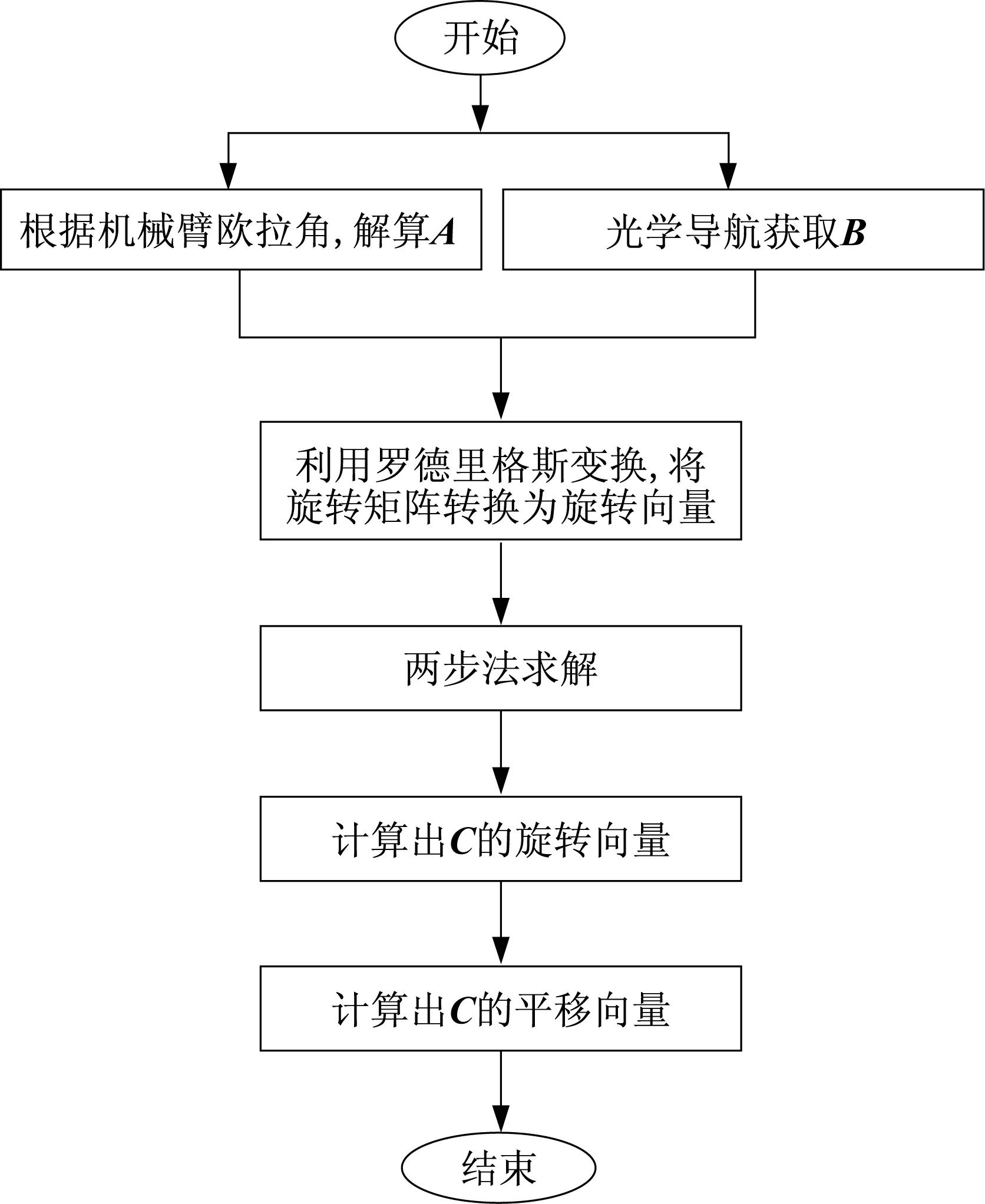
▲图12 求解手眼标定方程流程
7 试验分析
笔者使用35 mm球形摆锯对六组髋臼模型骨进行截骨试验,结果如图13所示。
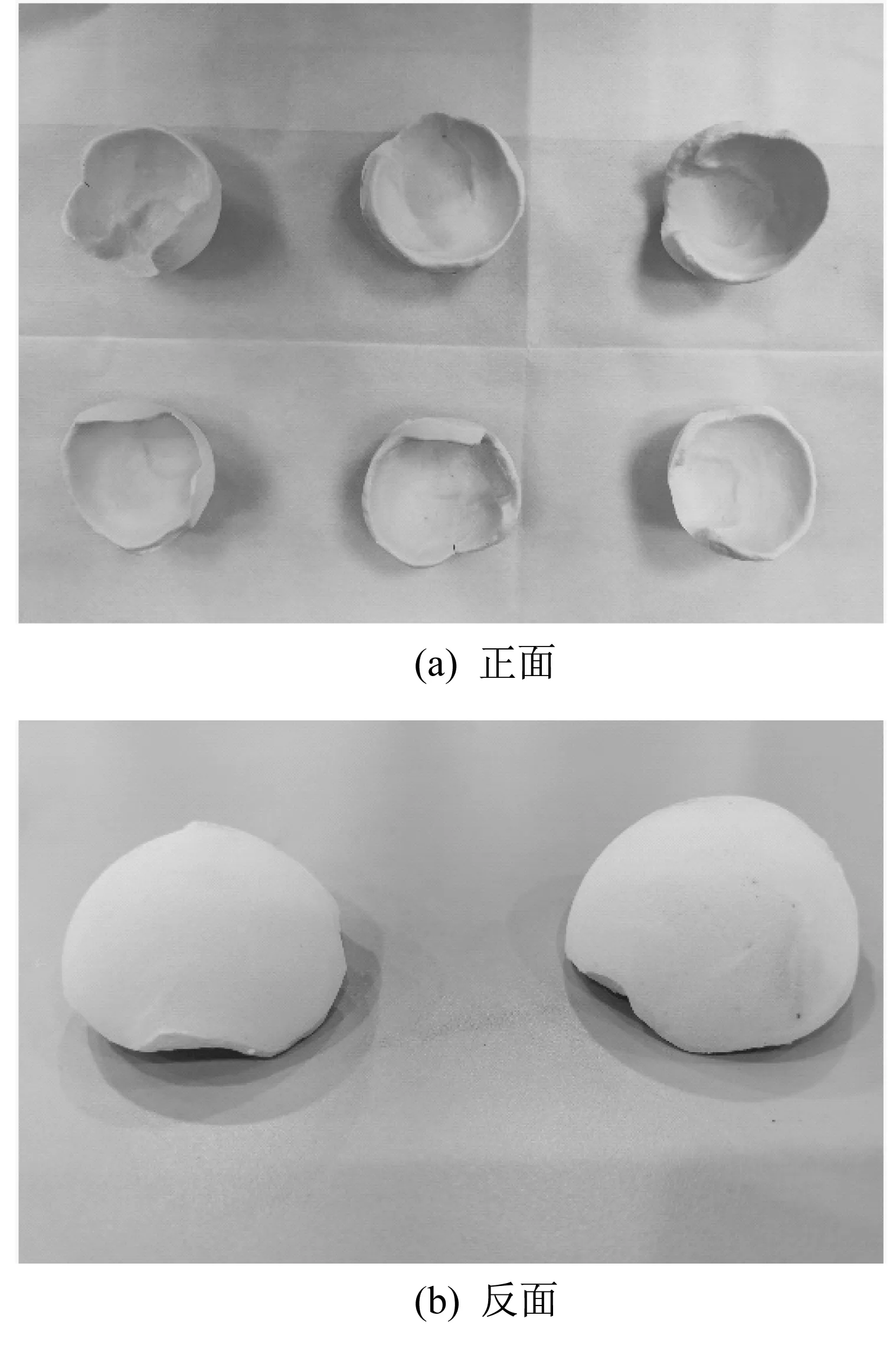
▲图13 髋臼模型截骨试验结果
对截骨下的髋臼进行分析,数据见表1。
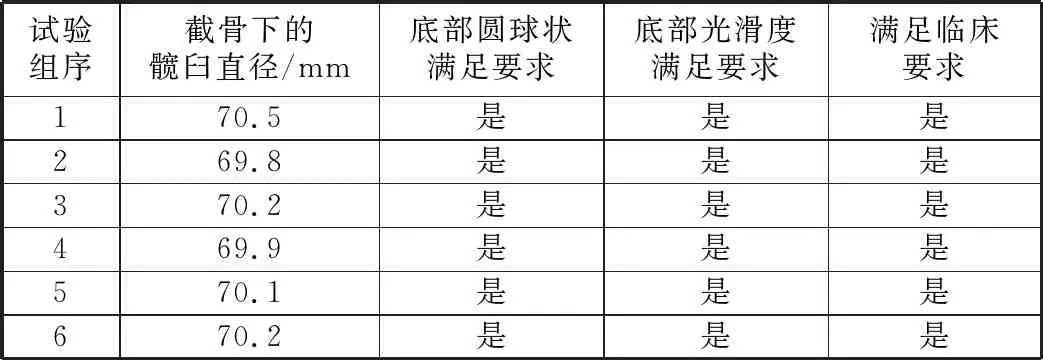
表1 髋臼模型截骨试验数据
8 结束语
笔者设计了髋臼旋转截骨手术机器人,通过截骨试验,确认截骨下的髋臼底部圆润,精度高,符合临床要求。
球形摆锯旋转中心点的标定方法还可用于其它类型的手术机器人。