核环境去污作业机器人研究现状与关键技术分析
2021-07-07秦基伟王天龙
□ 秦基伟 □ 常 勇 □ 王天龙 □ 吕 鹏
1.中国科学院沈阳自动化研究所机器人学国家重点实验室 沈阳 110016 2.中国科学院机器人与智能制造创新研究院 沈阳 110016 3.中国科学院大学 北京 100049
1 研究背景
目前,商业运行的核电站都是利用放射性重金属铀、钚核裂变反应释放的能量来发电的。核电作为一种清洁高效的能源,已在世界范围内得到了广泛的应用[1]。然而,在反应堆运行中,特别是在乏燃料后处理过程中,不可避免地会产生放射性污染物,使设备和工作人员受到不同程度的放射性污染,因此需要定期对核设施进行去污。由于核环境的高放射性,人工去污会增大工作人员的职业照射量。对此,各核能大国积极研制核环境去污作业机器人,以代替人工完成去污作业。应用核环境去污作业机器人,能够降低核设施和环境的放射性活度,减小工作人员的职业照射量,然而,核工业的恶劣环境提高了核环境去污作业机器人设计与开发的难度。笔者针对热室内放射性污染物去污的实际需求,对放射性污染物的种类、常用去污方法及核环境去污作业机器人的研究现状进行了总结,对核环境去污作业机器人的关键技术及每种技术面临的具体问题进行了分析,并总结了核环境去污作业机器人的发展趋势及研究方向,为核环境去污作业机器人的研制提供参考。
2 放射性污染物去污方法
放射性污染物指因含有放射性核素或被放射性核素污染,放射性浓度或放射性比活度超过国家规定限值的废弃物[2]。放射性污染物可能产生于铀矿开采和加工、反应堆运行、乏燃料后处理过程中,特别是在乏燃料后处理过程中,产生的废物放射性活度较高。根据物质表面与放射性成分相互作用的不同性质,污染机制可以分为三类[3]。
(1) 附着性污染。核素与物体表面通过分子力相结合,基本上属于物理性质,易于去污。
(2) 弱固定性污染。放射性成分以分子或离子形式通过物理吸附、化学吸附、离子交换与物体表面相结合,属于表面化学性质,较难去污。
(3) 强固定性污染。放射性成分通过扩散或其它过程渗入基质内部,很难去污。
附着性污染和弱固定性污染是在设备运行维护过程中需要去除的主要污染物。
附着性污染可以采用真空抽吸、擦拭、干冰喷射等物理方法去除。真空抽吸用真空吸尘器吸除附着在物体表面的污染物,适用于去除天花板、管道系统、粗糙表面等去污装置可接近的非黏性粒子[4]。干冰喷射利用干冰颗粒在冲击瞬间气化冲击污垢层,清除金属基材表面非金属污垢的效果非常明显。李烨等[5]采用干冰喷射去除核设施通风管道表面的放射性污染物,去污效率达到95%以上,所研制的干冰喷射去污装置具有去污效率高、对基材损伤小、二次废物产生量小等优点[6]。
弱固定性污染可以采用激光去污、化学去污、可剥离膜法等方法去除。激光去污的主要原理为物体表面污染物吸收激光能量后挥发或瞬间受热膨胀,进而克服表面的吸附力,脱离物体表面。激光去污效果好,速度快,二次废物产生少,并能实现精密控制,在管道、不锈钢表面清洗中均获得了理想的去污效果[7-8],但是不适合复杂形状构件的去污。化学去污利用化学去污剂溶解设备表面的放射性污染物。化学去污剂包括无机酸、有机酸、氧化还原剂、络合剂、碱类、表面活性剂等[9],主要去除粘附在金属及其氧化膜表面的放射性核素。对于富集在不锈钢表面的铀、钚等放射性核素,可采用化学擦拭法进行有效去污[10-12]。采用可剥离膜法,在成膜剂成膜过程中,高分子链上的官能团及其中的络合剂与污染核素发生物理、化学作用,使污染核素从被污染表面进入膜中,剥掉膜便可达到去污目的。可剥离膜法对大部分表面松散型浮尘类污染的去污效率为80%~90%,对不锈钢表面核素的去污效率达96%~99%[13-15],适用于壁面、地面和天花板的去污,当污染物沉积较厚时则不适用。
3 核环境去污作业机器人研究现状
核环境去污作业机器人的典型应用场合包括热室内壁、地板及设备表面、蒸汽发生器管内[16]。目前,可实现机器人化的去污方式有真空抽吸、湿布擦拭、激光去污、高压水冲洗、机械剥离等。
1996年,美国阿贡国家实验室利用安装于热室窥视窗两侧的主从机械臂夹持去污装置,采用真空抽吸和湿布擦拭的方法,对热室内设备进行去污[17]。这一方法去污范围及效率有限,后续还需要人工去污。
韩国原子能院研制了一种主从机械臂辅助远程去污系统,可在热室内自由移动,采用真空抽吸的方式收集热室地板、内壁与设备表面的乏燃料残渣,以及在乏燃料处理过程中产生的放射性污染物[18]。这一远程去污系统如图1所示,包括移动单元、收集单元、鼓风机单元、抽吸单元,结构简单,易于拆装。工作时,位于热室外的操作者控制远程去污系统到达热室内指定位置,利用主从机械臂抓住抽吸单元末端,将其移动至待去污表面,将污染物吸入收集单元内部,污染物经过滤器使尺寸0.3 μm以上的颗粒留在收集单元内部。

▲图1 远程去污系统
韩国原子能院设计的KSI柔性触手运动灵活,可像象鼻一样弯曲,其结构如图2所示[19-20]。KSI柔性触手采用真空抽吸的方法收集地板上及管道内部的放射性粉末、小碎片,成本较低,在完成热室去污后可直接弃用,省去对其自身进行放射性去污的麻烦。KSI柔性触手自身不能移动,需要用起重机悬吊至工作地点。受限于真空泵功率和触手长度,KSI柔性触手去污范围有限,触手难以靠近的地方不能实现去污。

▲图2 KSI柔性触手结构
以上两款核环境去污作业机器人均采用真空抽吸方法,用于去除热室内壁、地板及设备可接近表面上松散的附着性污染物。
韩国原子能院还研发了三套遥控清洁机器人系统,分别为ROCCS-Ⅰ、ROCCS-Ⅱ、TORMS[21-22],用于收集热室地板表面的核燃料碎片等附着性污染物。系统采用模块化设计,方便进行远程操作和维护。
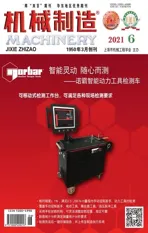
ROCCS-Ⅰ采用刷洗与真空吸附相结合的去污方式,主要由履带式移动平台、旋转刷、真空吸附装置、过滤装置组成,由电缆进行供电和控制,结构如图3所示。工作时,利用旋转刷使污染物脱离地板表面,由真空吸附装置将污染物吸入内部,经过滤装置使尺寸在0.3 μm以上的颗粒留在内部。
▲图3 ROCCS-Ⅰ结构
ROCCS-Ⅱ相比ROCCS-Ⅰ,增加了自主导航能力和图形模拟器,包括机器人本体和控制台两大部分,有自主控制和远程控制两种模式。由于操作者对热室内环境并不完全了解,因此为实现自主导航功能,在ROCCS-Ⅱ四周安装12个超声传感器,采集周围环境信息。ROCCS-Ⅱ可根据输入的位置指令及周围环境自主进行运动规划[23]。图形模拟器可以显示在热室内的工作状态及地板清洁情况,方便操作者进行控制操作。
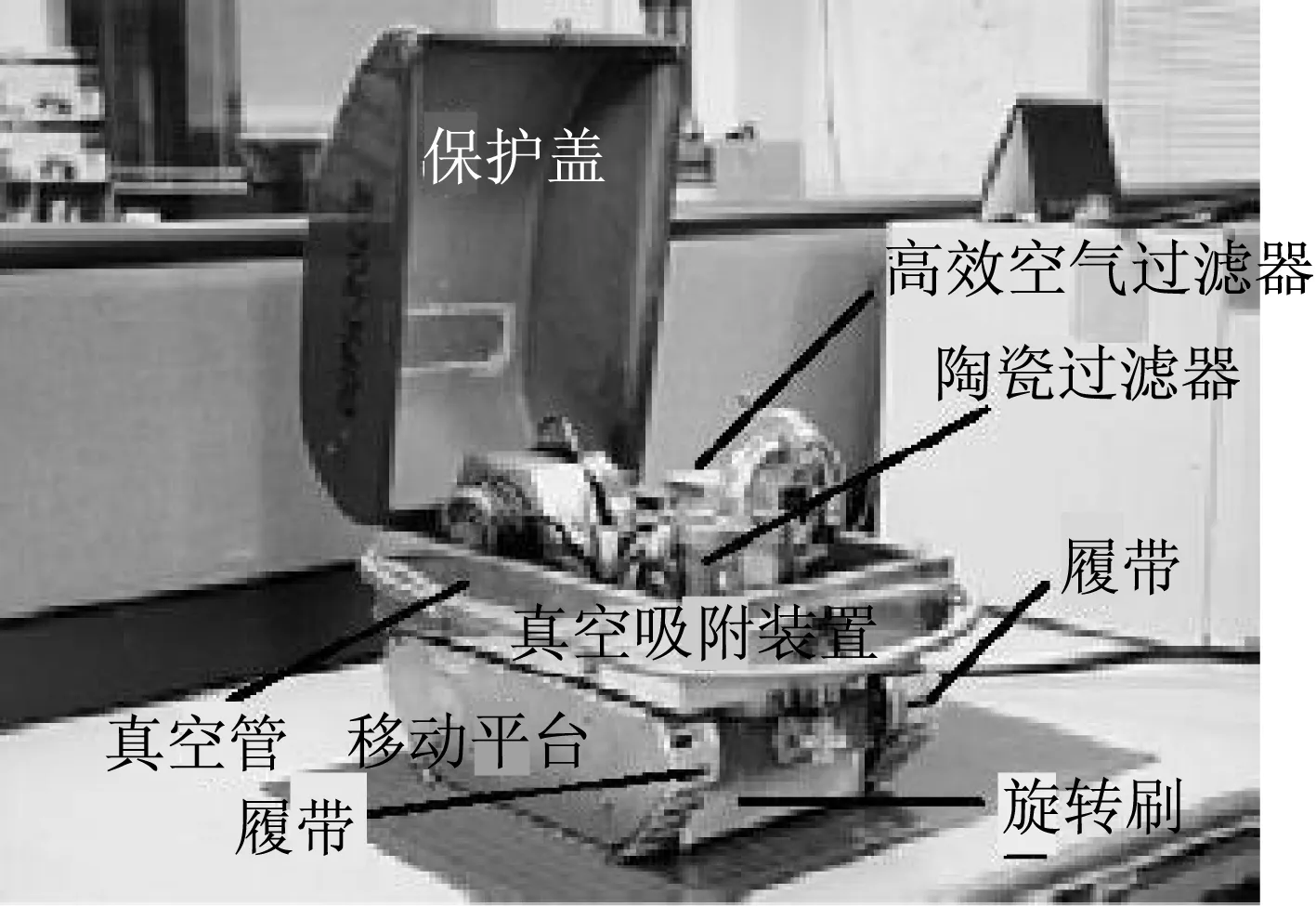
TORMS采用湿拖布清理地板表面的污染物,由位于热室内的拖地车和热室外的控制器组成,如图4所示。拖地车包括履带式移动平台、卷布筒、湿布料,利用卷布筒带动湿布料接触地板运动,实现对地板的擦拭。卷布筒单筒可擦拭24 m2地板,装置简单,去污效率高。TORMS采用双边力反馈控制,控制器可以将布料与地板表面的接触力反馈给操作者,便于操作者控制拖地力。
▲图4 TORMS系统组成
以上三款遥控清洁机器人系统适用于去除地板表面的附着性污染物。
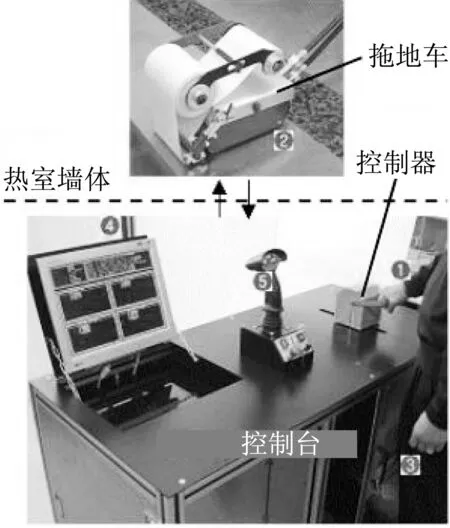
蒸汽发生器管内的淤渣沉积会腐蚀管材,并导致传热效率降低。美国研制的SECIL4机器人采用高压水冲洗蒸汽发生器管内沉积的淤渣,安装有小型摄像机,便于遥控机器人完成任务。美国萨斯克汉那核电站中的喷射器管嘴经常发生堵塞,研究人员对此开发了一种带机械臂和液体激光器的Romote Andros Mark Ⅵ机器人清洗系统,如图5所示。操作者远程控制Romote Andros Mark Ⅵ将液体激光器插入管嘴,利用高能激光束对管嘴进行清洗。以上两种核环境去污作业机器人适用于去除管道内的附着性污染物。
▲图5 Romote Andros Mark Ⅵ机器人清洗系统
斯洛伐克在核事故堆退役过程中设计了化学去污装置。DEZA-OD用于管道、槽罐及类似设备拆卸解体前的预去污,可以完成去污液加热、浸泡去污对象、循环去污、排泄去污废液、收集固体颗粒物等去污流程。MT-15是一种遥操作化学去污装置,可配置多种作业工具清理、装桶高辐射区内散放的高污染杂物,并对地面高污染物进行机械剥离,实现真空吸尘去污。DOV-Deco配置高压水喷嘴和真空集水集尘头,可以对污染物表面进行高压水冲洗,去污后的废水及污染物由装在喷嘴下的真空集水集尘头收集于桶内。
中国工程物理研究院研制的远距测量和去污机器人系统对Brokk180机器人、放射性污染远距离测量装置和去污工具进行集成,用于反应堆等核设施的退役去污。Brokk180机器人如图6所示。Brokk180机器人携带测量装置,获取污染源的辐射信息,并利用去污工具将污染源剥离。Brokk180机器人去污速度快,单次剥离厚度为2~5 mm,缺点为存在时延问题。

▲图6 Brokk180机器人
4 核环境去污作业机器人关键技术
相对于在常规环境下工作的机器人,核环境去污作业机器人设计时必须考虑以下特殊要求:① 本体必须具有耐辐射能力、模块化结构、可靠的供电系统及系统故障状态下的应急处理装置;② 需配备摄像机和射线传感器,对环境进行实时监控,并保证在封闭环境中的可靠通信;③ 去污装置应具备去污能力强、去污效率高、拆卸方便、便于控制等特点;④ 完成去污作业后自身应便于去污。耐辐射技术、可靠通信技术、高效去污技术是核环境去污作业机器人的关键技术。
4.1 耐辐射技术
核放射环境中主要存在伽马、阿尔法、贝塔和中子辐射。阿尔法粒子和贝塔射线在物质中的射程较短,利用外壳即可屏蔽。只有在反应堆运行期间,压力容器附近区域才存在强中子辐射场,而伽马辐射普遍存在于核放射环境中,因此伽马辐射是核环境去污作业机器人辐射防护主要需要考虑的对象。根据辐射损伤机理,可以将辐射效应分为单粒子事件、电离总剂量、位移损伤等[24]。
对于单粒子事件,高能粒子射入电路板后,会在径迹附近发生强烈的瞬态电离,产生瞬态等离子体,使寄生器件状态发生变化,导致各类损伤。
对于电离总剂量,高能粒子射入场效应管或双极性器件时,使二氧化硅电离产生大量电子空穴对;有外加电场时,电子和空穴沿电场方向相向运动,空穴的累积形成栅氧空穴捕获和界面捕获,栅氧空穴捕获和界面捕获产生的额外电场导致元器件异常。
对于位移损伤,高能粒子射入元器件及材料时,与原子核产生库仑弹性碰撞,使晶格原子离开正常位置,造成器件功能部位的晶格缺陷,导致器件性能参数退化,缺陷逐步累积,直至器件丧失功能。
应从耐辐射材料的选择、各电气部件的耐辐射策略展开核环境去污作业机器人耐辐射研究。将组成核环境去污作业机器人的所有材料或器件分为金属及其合金、光学材料、有机材料、电子学器件[25]。金属结构的耐辐射性能较好,特别是铁、镍、铅、钨等元素,对伽马射线和快中子都具有较好的减弱作用。其中,含硼奥氏体不锈钢对中子和伽马射线的综合屏蔽性能较好,同时具备高强度和良好的韧性,可以作为结构材料使用[26]。光学材料的辐射效应主要表现为透光率降低,在光学材料中掺杂某些元素或在镜头外包裹屏蔽材料,能提高耐辐射性能[27]。对于轮胎、绝缘材料、密封剂、润滑剂、粘合剂等有机材料,辐射易造成力学性能和绝缘性能降低[28]。通过改进材料组分,可以提高有机材料的耐辐射性能。对于塑料、橡胶、树脂、油漆、涂料等耐辐射性能较差的材料[29],应尽量替换为耐辐射性能较好的材料。电子学器件涉及无源器件、半导体元件、成品配件和集成电路。通过材料和工艺的改进,可以提高无源器件和半导体元件的耐辐射性能,当然,需要在使用前进行辐照试验筛选。摄像机中一般选用电荷耦合器件相机,并通过改进传感器生产工艺,采用抗辐射加固材料提高耐辐射性能。选用电机时,应首选电容启动的单相交流电机、带永久密封轴承的电机、低压电机或高温绝缘电机,避免使用内置电子电路的直流电机。核环境中使用超声传感器和无刷旋转变压器,可靠性较高。电磁传感器可将电子电路布置在远端,提高耐辐射性能[30]。标准的光电编码器耐辐射性能较差[31]。
集成电路的耐辐射性能都相对较弱,因此针对集成电路的耐辐射设计是核环境去污作业机器人耐辐射技术的关键,目前主要有两种方法:采用抗辐射加固的材料或器件,硬件或软件的优化设计。抗辐射加固采用硅技术、硅单晶膜、砷化镓、金刚石和铁电材料等加固器件,提高大规模集成电路在强辐射条件下的可靠性,仅有少数制造商能够生产,造价昂贵,品种和型号较少[32]。硬件或软件的优化设计方法主要有分离、屏蔽、冗余、电路优化设计和控制软件设计。分离指将机械部分与电子学部分相分离,但工作距离受限,不适合用于机电一体化机器人。屏蔽指采用辐射屏蔽材料对元器件进行整体防护,屏蔽材料可减缓一次粒子的能量产生,并吸收次级辐射,从而使被屏蔽的元器件不受或少受辐射损伤,但会增大核环境去污作业机器人自重,影响其灵活性。为减小屏蔽材料的厚度,经常在器件表面的管壳上进行局部屏蔽。冗余设计主要指利用半导体器件,尤其是集成电路芯片在断电时能承受更大辐射量这一现象,重复配置关键元器件,提高系统的可靠性。电路优化设计通过对电路失效模式进行分析,预测辐射损伤的薄弱环节,通过容差设计、降额设计等方法提高电路的耐辐射性能。中国工程物理研究院采用降额使用、冗余设计方法提高了三端稳压器电源电路的抗中子注量水平,降低了因器件辐射性能分散而引起的加固失效风险[33]。中国辐射防护研究院选用耐辐射的现场可编程门阵列芯片,通过降额与容差设计,提高了核环境去污作业机器人控制系统电路的耐辐射性能[34]。该院研制的核环境去污作业机器人选用耐辐射性能较强的电子元器件,通过电路的优化设计将电路体积减至最小,并选择钨作为屏蔽材料,可以在100 Gy/h的强辐射环境中工作[35]。控制软件设计中采用容错控制方法,可以提高核环境去污作业机器人的耐辐射性能。丑武胜等[36]设计了双机冗余容错控制系统,根据不同层面的情况采用多种检测方法判断故障的具体位置,并针对各种故障采用相应的处理方法,提高了核环境去污作业机器人的可靠性。
4.2 可靠通信技术
核环境去污作业机器人工作于人不能到达的放射性环境,一般采用遥操作控制,因此必须保证核环境去污作业机器人与远程控制终端的可靠通信。在核辐射环境中,光纤通信条件差,通信数据可靠性低、错误率高。受混凝土墙体的屏蔽作用,通信带宽低,信号强度弱。通信环节中存在时间延迟。以上因素均会对遥操作闭合回路的稳定性和透明性产生不利影响[37]。
高能辐射易引起光纤中电子或原子核移位,使光纤发生物理或化学变化,信号的传输能力降低[38]。在光纤中掺杂适量的氟、氮等元素,可以提高耐辐射性能,但掺杂元素的种类和浓度会影响光纤的光学性能。针对数据通信可能存在的错误,将里德-所罗门码应用于核环境去污作业机器人遥操作系统,可以提高数据通信的可靠性[39]。
在热室内工作的核环境去污作业机器人与控制器之间存在厚度为1.5~2 m的混凝土墙体,混凝土墙体对无线通信信号有极强的屏蔽,有线通信则易引起通信线缆缠绕,影响核环境去污作业机器人的行进和工作。针对这一问题,主要采用三方面措施:通信线缆防缠绕设计,发展高频无线通信,在核环境去污作业机器人系统与远程终端间增加通信中继。参与福岛核事故救援的背包机器人采用无线与有线通信相结合的方式,无线通信距离为800 m,同时配备200 m长通信线缆,在无线通信不可用时使用有线通信。线缆卷轴器能够根据背包机器人的运动自动收放线缆,尽可能减少线缆缠绕。背包机器人可根据需要配备2.4 GHz或4.9 GHz频段全向天线,增强信号的穿透能力。同样参与救援的Quince2号机器人采用光纤通信加中继器模式,如图7所示。其中,一台机器人作为中继器,中继器与基站之间采用无线通信,与另一台机器人之间采用光纤通信,扩大了机器人的运动范围,提高了通信可靠性。
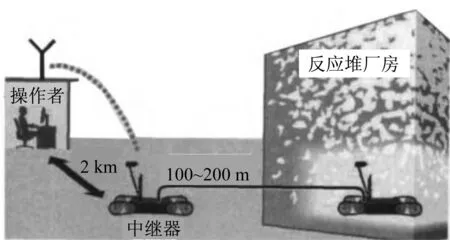
▲图7 Quince2号机器人通信
目前,针对时延问题的遥操作方法主要有力反馈双边控制、图形预测控制和监督控制。力反馈双边控制使操作者和远端通过力与速度的反馈相互作用,不需要对远端环境进行建模。邓启文等[40]通过控制算法提高了力反馈双边控制的稳定性和透明性,从而减小通信时延造成的影响。王裕基等[41]将从操作臂的距离信息转换为主操作臂施加给操作者的力,从而降低因时延造成从操作臂与环境发生碰撞的可能性。李焱等[42]基于监控思想和遥编程概念,实现了应用虚拟现实的大时延遥操作。
4.3 高效去污技术
核环境去污作业机器人的去污能力是性能的重要指标。目前,核环境去污作业机器人常用的去污方法见表1。其中,真空抽吸和湿布擦拭仅适合去除表面松散污染物,激光和高压水冲洗比较适合平面或管道内部的去污。目前,去污装置的应用对象和范围仍然有限,难以去除复杂形状表面的弱固定性和强固定性污染物[43]。

表1 核环境去污作业机器人去污方法
5 核环境去污作业机器人发展趋势
去污技术的发展、集成电路的耐辐射性能及机器人智能化程度的提高推动了核环境去污作业机器人的发展。然而,由于放射性环境恶劣、污染物种类多、去污过程复杂,核环境去污作业机器人的发展面临重大挑战。为了能够在各种核环境中完成去污工作,核环境去污作业机器人将向三方面发展。
(1) 集成电路耐辐射加固技术。集成电路是组件中耐辐射性能最差的部分,采用硬件或软件的优化设计提高了系统的复杂度,降低了系统的性能,并且不能从根本上提高系统的耐辐射性能。对半导体材料耐辐射性能进行提高是提高集成电路耐辐射性能的根本方法,其主要研究内容包括:从微观层面对半导体材料的辐射损伤机理进行研究,对影响材料耐辐射性能的微观结构进行改进,研制出耐辐射能力强的半导体材料,对材料的制造工艺进行改进等。
(2) 可靠性技术。核环境具有高放射性及封闭性,使工作于其中的核环境去污作业机器人较易发生安全事故。因此,提高核环境去污作业机器人的可靠性是保证正常工作的前提。可从以下几方面提高核环境去污作业机器人的可靠性:优化作业流程,以尽量减少工作时间;根据耐辐射性能规定在辐射环境中工作的最长时间;控制系统简单可靠,关键系统采取冗余备份;考虑突发事故的应对策略;保证在较强屏蔽环境中的可靠通信,减少通信延时。
(3) 去污高效技术。目前,核环境去污作业机器人对去污环境的适应性较差,适合采用的去污方法有限。因此,进一步提高核环境去污作业机器人的灵活性和智能化程度,并根据核环境去污作业机器人的作业能力和去污环境研制出合适的去污装置,是提高核环境去污作业机器人去污能力的关键。
6 结束语
笔者针对利用机器人对核环境中放射性污染物进行去污的需求,开展了核环境去污作业机器人的相关技术调研。根据放射性污染物的种类,介绍了常用的去污方法及现有几种核环境去污作业机器人的去污原理与应用范围。分析了核环境去污作业机器人需要解决的关键问题。核环境去污作业机器人在核环境中的耐辐射性能、可靠性及高效的去污能力,仍然是研究的关键技术,并且是性能评价的重要指标。