基于PLC的多功能联合整地机监控系统
2021-07-07隋仁东张玉海张文举刘焕伟李胜多胡彩旗李睿颖
隋仁东,张玉海,张文举,刘焕伟,李胜多,胡彩旗,李睿颖
(1. 青岛农业大学发展规划处,山东青岛 266109;2. 滕州市东大矿业有限责任公司,山东滕州 277514;3. 青岛农业大学机电工程学院,山东青岛 266109;4. 山东亿嘉农业机械有限公司,山东寿光 262714)
土壤的耕整作业是获得良好播前种床的重要作业项目[1],是实施农田保护性耕作的重要保障。长期的耕作实践活动已证明[2-4],进行深松作业能够加深土壤的耕作层,增加土壤颗粒间隙,提高土壤的通透性,使各营养成分在土壤中充分混合,易于作物吸收。土壤经过深松后,土壤板结现象减轻,便于作物根系生长到更深层土壤中,利于作物生长。利用多功能动力驱动联合整地技术可一次完成深松、耙耕、碎土、平整镇压等多项作业,减少机器进地作业次数,改良土壤的层粒结构和渗水、透气性能,达到增产增收的目的。作业深度是否合适或达标,直接影响深松作业质量[5-7]。
传统的耕深评价方式为选好采样点后,使用钢尺和卷尺等工具进行手工测量。因为人为因素、土壤条件、离散采样点等的影响,耕整作业的测量精度难以保证,尤其是面对较松软的土壤环境时,主观因素引入的测量误差对最终耕深效果评判产生较大影响。而且,人工测量数据少,数据的时间和空间跨度大,无法得到数据的连续变化情况,对后续数据处理和评判带来诸多不便。另外,人工测量耗费较多的人力、物力,效率低下[8]。因此,需要设计一套多功能联合整地机监控系统,能够及时、准确、全面地获取耕深作业参数,进而全面评估多功能联合整地机耕整作业质量。该系统主要由硬件电路和软件监控系统组成,设计耕深计算模型,推导耕深计算公式,通过人机交互界面实时设置作业参数、实时接收机具作业状态并反馈,便于机手和农户及时掌握耕整地作业质量。
1 系统组成及工作原理
多功能联合整地机主要由深松铲、动力驱动耙和整平镇压辊组成。深松铲通过螺栓连接固定在机架横梁上;动力驱动耙由拖拉机动力输出轴输出动力并通过变速箱传至驱动耙的竖直轴,从而驱动耙刀绕竖直轴旋转,旋转的耙刀切碎土块,使土壤形成颗粒均匀、大小适中的种床;齿面呈螺旋布置的整平镇压辊进一步整平土壤。机具一次性完成多道耕整地工序,提高了机具作业效率。
同时还需要保证机具作业质量,耕深是衡量多功能整地机作业质量的重要指标。多功能联合整地机作业监控系统主要由测深装置(角度传感器)、测速装置(速度传感器)、ZK3U型可编程逻辑控制器(programmable logic controller,PLC)、触摸显示屏和监控系统软件等五部分组成,系统设计如图1所示。将角度传感器安装在拖拉机三点悬挂的下拉杆上作为测深装置,将速度传感器安装在拖拉机后桥靠近后轮处作为测速装置(图2)。根据当地农艺要求和机具的实际尺寸,作业前需在触摸显示屏上设置相关参数及作业宽幅、耕深上限值和下限值。作业时,拖拉机悬挂的下拉杆因耕深不同而产生浮动变化,角度传感器实时检测和输出变化的角度信号,并将使用模拟量表示的角度信号通过A/D电路转换后传输至PLC控制器,PLC控制器根据设定好的耕深算法计算实际耕深,通过串行数据通信接口标准RS232(RS232是串行数据通信接口标准编号)转换后,输出到触摸显示屏显示。如果耕深超出设定的上、下限数值,触摸显示屏显示报警信息,同时蜂鸣器报警。

图1 监控系统组成Fig. 1 Composition of monitoring system

1. 触摸显示屏 2. PLC控制器 3. 速度传感器 4. 角度传感器图2 监控系统布置图Fig. 2 Monitoring system layout
2 系统硬件电路设计
监控系统的硬件结构包括PLC控制器、供电系统、A/D转换电路、角度传感器、速度传感器、触摸显示屏,实物如图3所示。
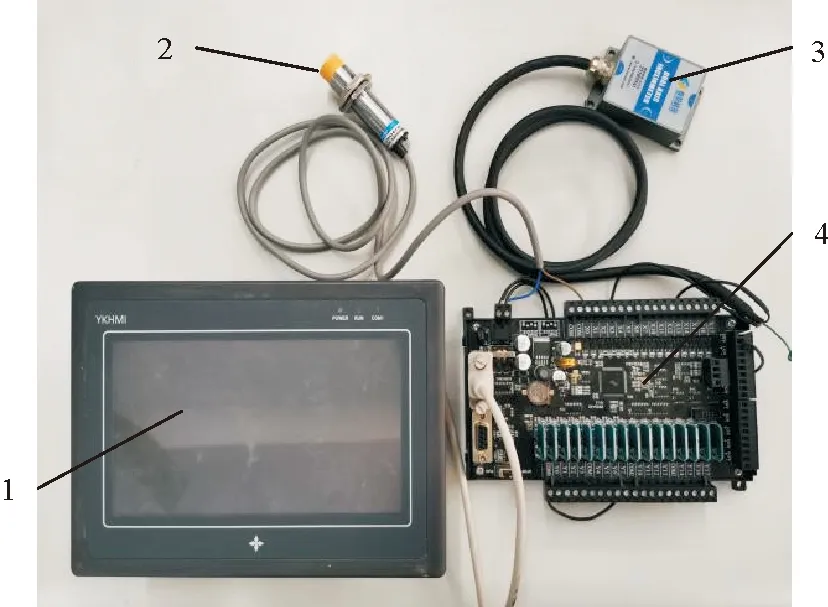
1.触摸显示屏 2. 速度传感器 3. 角度传感器 4. PLC控制器图3 监控系统硬件组成Fig. 3 Monitoring system hardware
2.1 供电系统
整地机在工作过程中一般不采用有线供电方式,因此,本系统设计为由拖拉机蓄电池供电。PLC控制器、触摸显示屏等的工作电压为24 V,和拖拉机蓄电池电压一致,因此,可将24 V蓄电池的输出端接入PLC控制器、触摸显示屏的电压输入端,直接为该系统供电。
2.2 PLC控制器
本设计选用ZK3U型PLC作为微控制器。ZK3U型PLC是一种高性能、低成本、低功耗的微处理器,具有良好的开放接口,与传统的PLC控制器相比,ZK3U型PLC控制器硬件资源更为丰富、价格更为低廉,可实现多功能联合整地机作业过程的信息实时采集和处理。
2.3 角度传感器
测深装置的角度传感器采用HVT116T传感器。HVT116T传感器是一款模拟电流输出传感器,通过模拟电流输出计算当前传感器的倾角值,电路如图4所示。该传感器采用高精度MEMS微机电技术,内部采用最新封装工艺,可防水,产品体积小,功耗低。

图4 测深用HVT116T传感器电路Fig. 4 Circuit diagram of HVT116T sensor for tillage depth measuring
将角度传感器安装在拖拉机后悬挂下拉杆上,深松铲通过螺栓连接固定在联合整地机的机架上,拖拉机后悬挂和联合整地机通过三点悬挂连接,深松铲尖在水平地面时的状态设置为0°。机具工作时随着深松铲下降深度的增加,下拉杆存在下沉动作,固定在下拉杆上的角度传感器输出变化的角度值,可通过计算转换为实际耕深。采用等效法设计耕深计算模型,通过耕深计算公式将角度变化转化成相应耕深,将下拉杆支点到深松铲尖的连线等效为一连杆,耕深计算模型如图5所示。耕深计算公式为:
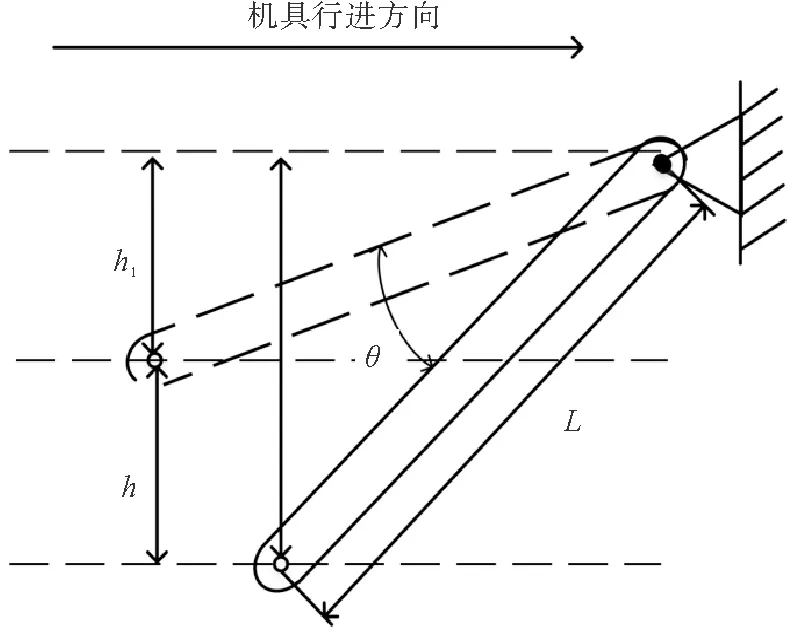
图5 耕深计算模型Fig. 5 Schematic of tillage depth calculation model
(1)
式中:h,实际耕深,cm;L,下拉杆支点到深松铲尖距离,cm;h1,铲尖与地面接触时深松铲尖到下拉杆支点的垂直距离,cm;θ,角度变化,rad。
2.4 速度传感器
将光电速度传感器安装在拖拉机后桥靠近后轮的位置,金属检测块固定在拖拉机后轮上,随后轮一起转动,拖拉机后轮转动带动金属检测块对传感器产生正比的脉冲,通过对脉冲的分析计算,可得后轮转速。测速电路如图6所示。设沿着拖拉机后轮一周有Z个检测块,则转速为:
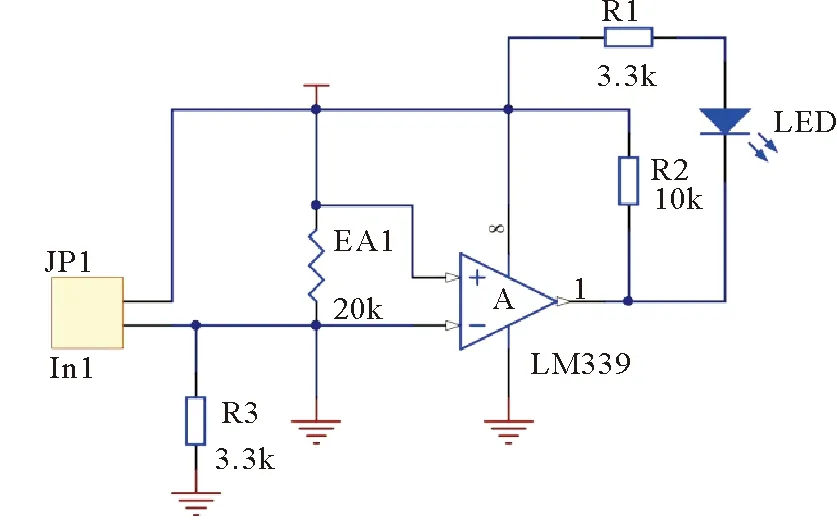
图6 速度传感器测速电路Fig. 6 Circuit diagram of speed sensor
(2)
式中:n,拖拉机后轮转速,r/min;N,脉冲个数;Z,检测块个数;t,检测时间,min。
3 人机界面设计
通过人机界面设计软件YKHMI V3.3,自主进行监控界面设计以符合具体应用要求。 PLC控制器和触摸显示屏通过RS232串口进行通信。选用S700A型串口触摸显示屏作为控制显示模块,该显示屏采用A8800 MHZ RISC处理器,配有128M FLASH存储器、800像素×480像素显示屏,工作温度在0~45 ℃。
监控系统通过人机界面对话框输入作业幅宽和耕深限值等参数,PLC控制器实时读取各传感器的检测信号,通过预设算法将相关信号转换为耕深,并将耕深、作业面积、作业速度等参数实时显示在触摸显示屏上。操作人员可通过触摸显示屏监控整地机相关作业参数,掌握整地机的工作环境和工作状态。
4 软件设计
软件设计部分主要包括耕深计算、超限报警、作业面积统计计算等。系统软件流程如图7所示,软件上电进行程序初始化,通过触摸显示屏输入耕深限值、作业幅宽等参数。为保障合理采样而又不导致数据拥堵,根据机具前进速度,设置测深传感器检测采样频率为10~20 Hz。系统实时采集、计算并显示耕深、作业速度和耕地面积,当收到人机界面发来的指令时,系统会执行相应的功能。
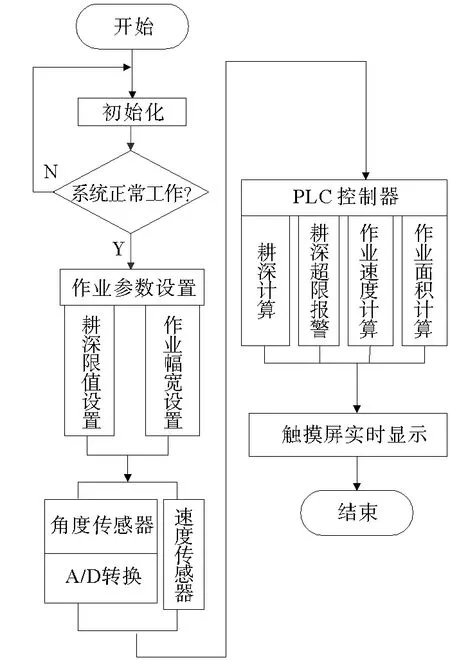
图7 系统软件流程 Fig. 7 System software flowchart
5 田间试验
5.1 试验方案
本作业监控系统在1ZL-4000型多功能联合整地机上进行了安装、调试和应用,并在山东亿嘉公司的田间试验场地进行试验,如图8所示。为了检验自动监控检测耕深值的准确性,设计了手工测量耕深方案,即在田间试验场地取长25 m、宽12 m,两端分别留有15 m的稳定区为测区,在测区对角线上取5个采样点,测定每点耕后深松沟底到地表面的垂直距离,按式(3)计算耕深:

图8 田间试验Fig. 8 Field experiment
(3)
式中:aj,平均耕深,cm;aji,第i个点的耕深,cm;nj,采样点数量,nj=5。
5.2 试验结果
配套拖拉机动力为147 kW,土质为壤土,地势平坦,土壤含水率为23.5%。试验时,记录拖拉机不同作业速度下的监控系统显示的不同采样点的耕深和手工测量耕深,计算平均值并比较监控显示耕深和手工测量耕深,结果如表1所示。

表1 监控显示耕深与手工测量耕深结果比较Table 1 Results comparison of tillage depth measured by monitoring and manual method
田间试验结果表明,监控系统显示耕深和手工测量耕深相对误差小于5%,满足田间耕整地作业要求,说明该监控系统在多功能联合整地机作业过程中适用性良好,达到设计要求。
6 结论
本文进行了基于PLC的多功能联合整地机作业监控系统的设计和研发,包括硬件部分的电路设计和软件部分的程序开发。经过调试、运行和田间试验,结果表明该系统稳定性高,检测误差小,界面友好,操作简单方便,为农户和机手对联合整地机作业状态和作业质量的监控提供了重要的依据,对促进农业生产和多功能联合整地机的发展具有重要意义。
