基于改进型双模糊控制的光伏MPPT的研究
2021-07-06牛秋实施建强惠子轩
牛秋实,施建强,惠子轩
(南京工程学院电力仿真与控制工程中心,江苏南京 211167)
当今社会经济不断发展,对能源的需求也日渐增加,太阳能作为一种新能源逐渐受到社会的重视,地球每年获得的太阳辐射能力可达173 000 TW,且太阳能取之不尽,用之不竭[1-2]。光伏发电是目前太阳能最主要的利用方法[3]。由于太阳能在转化成电能的时候易受外界环境影响从而表现出非线性,负载很难接收到光伏电池提供的最大功率,为提高光伏系统的光-电转换效率,光伏电池的最大功率点跟踪(maximum power point tracking,MPPT)成为当下的研究热点。
传统的最大功率点跟踪方式一般有恒定电压法、电导增量法和扰动观察法(P&O)等[4],但这些方法都存在各自的缺陷。就定步长扰动观察法而言,该方法虽然原理简单且容易实现,但在步长选择上常易出现问题:当选用的步长过大时会造成工作点在最大功率点附近振荡;采用较小电压步长搜索时跟踪速度较慢,影响工作效率;当外界环境发生剧烈变化时,系统会变得不稳定甚至产生误判。针对这些问题,文献[5]提出一种基于功率差变步长改进方法,提高了响应速度,但是对响应精度未有明显改进,文献[6]提出一种基于最大功率点跟踪算法的自适应变步长神经模糊推理系统技术,提升了系统动态操作性,减低了最小工作点波动,但是模糊控制器中的比例积分环节未能有效降低能量损耗,且由于前一时刻的电压差判断不及时易导致错判和误判。本文针对尚存问题,结合模糊控制原理和PID 控制器,对扰动观察法进行改进,选取自适应变步长策略,使用双模糊控制对步长进行调整,减轻最大功率追踪时候的震荡,加快响应速度,提高光电转换效率,有效提高跟踪精度。
1 光伏电池的数学模型与特性分析
本研究选用单体光伏电池,对其内部结构和外部输出特性进行简化,得到如图1 所示的电路模型[7]。

图1 单体光伏电池等效电路模型
光伏电池输出电流公式为[8]:

式中:I为光伏电池输出电流;Is为光生电流;ID为二极管反向饱和电流;K为玻尔兹曼常数,1.38×10―23J/K;q为单位负荷,1.6×10-19C;T为外界环境温度;U为电池输出电压;Rs为串联等效电阻;R0为并联电阻;n为二极管指数。
在实际工程中,式(1)在标准温度和气压下(25 ℃,1 000 W/m2)经过近似处理后可写成[9]:


式中:UOC、ISC为光伏电池的开路电压和短路电流;Um、Im为最大功率时对应的电压值和电流值。
在MATLAB/Simulink 中搭建仿真电池模型如图2 所示。输入参考变量为光照强度和温度,仿真参数设置如下:ISC=8.58 A,UOC=22 V,Im=7.9 A,Um=17.7 V,设定参考温度和光照强度为25 ℃、1 000 W/m2时,最大输出功率Pm=139.8 W。

图2 光伏电池仿真模型
仿真所得的输出功率-电压曲线如图3 所示。由图3 可知,光伏电池的输出功率为单峰曲线,本研究目的就是使光伏电池系统维持工作在最大功率点处。
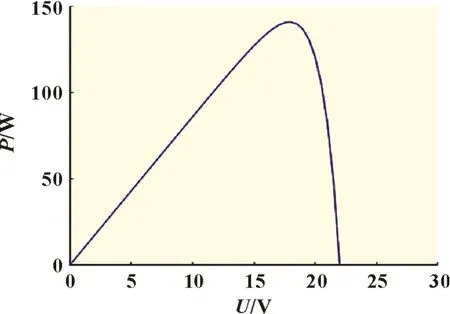
图3 功率-电压输出特性曲线
2 光伏电池MPPT 原理
当负载电阻与电池内阻相等时,光伏电池可发出最大功率,即实现最大功率点跟踪[10]。但实际情况下,光伏电池的内阻会受外界温度和光照强度的影响而改变,MPPT 控制器就是根据需要对负载电阻进行控制和改变,使其与电池内阻相匹配。目前的最大功率跟踪器大都选用DC-DC 变换器,本研究选取Boost 电路作为DC-DC 变换电路,光伏发电系统MPPT 控制电路如图4 所示。
开关Q1导通时,电感L1会被充电,电流大小为1 A,二极管D4被短路,一段时间后关断开关Q1,由于电感L1具有电流保持性,电流从充电结束时的状态缓慢降为0,电感会对负载供电及电容充电来释放能量[11]。根据能量守恒定律,一个周期内电感释放的能量与吸收的能量相等,即:

根据图4 可得:
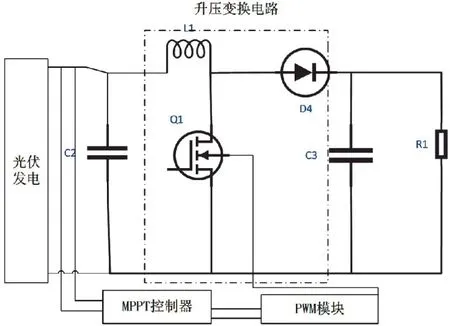
图4 基于Boost变换电路的MPPT控制电路

式中:D为占空比,D=ton/(ton+toff),ton和toff分别为开关管导通时间和关闭时间;Ri为光伏电池的输入阻抗。由式(8)可以看出,当R保持不变时,Ri会随着占空比D的变化而改变,所以我们可以通过改变占空比的大小,使光伏电池的输入阻抗与负载电阻匹配,从而达到最大功率点跟踪。
传统的单体光伏电池发电系统对应的占空比-功率关系图如图5 所示,当dP/dD=0 时系统可工作在最大功率点,本研究仅将占空比作为调节变量,可减少系统其他参数的修改,加快功率跟踪效率,降低系统成本。

图5 传统的单体光伏电池发电系统占空比-功率特性曲线
3 双模糊控制改进的MPPT 方法
模糊推理基本流程图如图6 所示。本文采用的双模糊控制系统均为Mamdani,解模糊处理采用重心法[12]。模糊控制器1 输出为参考电压扰动步长值ΔUref,模糊控制器2 与PID控制器结合,输出为PI 控制器的KP和KI,进而调节占空比。

图6 模糊推理基本流程图
3.1 参考电压环节
本环节即根据输出功率的误差大小,采用模糊控制,实现变步长的参考电压ΔUref,即为扰动观察法的动态扰动步长。模糊控制器的输入1 和输入2 分别为ΔU(n)、ΔP(n)。

式中:U(n)和P(n)分别为第n个采样点所采样的电池输出电压和功率;每个输入量的成员函数均为七个模糊子集[13-14]:

论域均设为[-6,6],其中NB、NM、NS、ZO、PS、PM、PB 分别表示模糊规则中的负大、负中、负小、零、正小、正中、正大,所有域的隶属函数均选择三角形波。由图3 可知,当dP/dU=0 时系统工作在最大功率点,即当:
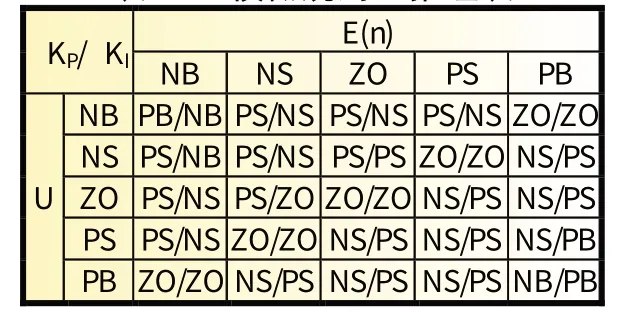
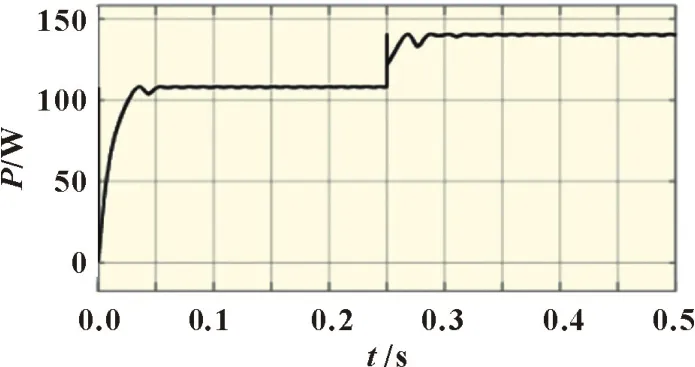
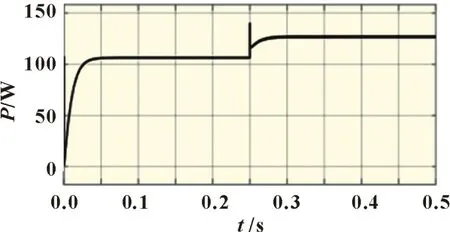
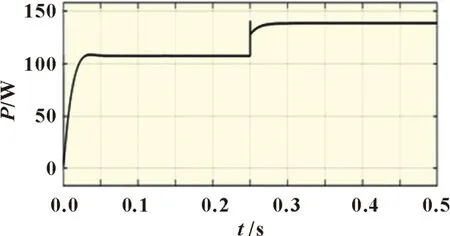
ΔU(n)⋅ΔP(n)>0,P(n) ΔU(n)⋅ΔP(n)<0,P(n)>Pmax时,工作点位于最大功率点右侧,需维持或反向增加ΔUref。 根据这一物理特性,可设定如表1 的模糊控制规则。 表1 模糊规则1推理表 该环节将模糊控制与PI 控制结合,利用模糊控制自适应调节PI 控制器的参数KP和KI,传统的模糊自适应PI 控制中,PI 控制里面的参数一般采用误差E(n)和误差变化量ΔE(n)确定,但是本方法的输出并非为模糊控制器1 输出的ΔUref及其变化量,而是选取了新的变量输入。 在模糊控制器1 输出参考电压ΔUref,系统根据扰动观察法对电压U进行调整,下一时刻的电压U0(n)是上一时刻的电压U0(n-1)加上控制器1 输出的参考电压,设U(n)为控制器比例环节变量。本研究采用的光伏电池对应的理想最大电压Umax=17.7 V,设Umax与U0(n)的差值为积分环节变量,即模糊控制器2 的两个输入为: 式中:K为电压增益系数,取值为1.2。控制器的输出为比例系数KP和积分系数KI,则占空比D(n)可由控制器2 得到: 式中:U0(n)=0.1×U(n);T为采样周期。设模糊控制器的输入量和输出量的成员函数均为五个模糊子集:{NB,NS,ZO,PS,PB},论域变化范围为[-6,6]。根据参考文献[15-16]可设定模糊控制规则如表2 所示。 表2 模糊规则2推理表 上述两个控制均基于模糊控制器,即双模糊控制(参考电压模糊控制-PID 模糊控制),具体配合流程如下: 模糊控制器1 获取光伏电池的实际输出功率与电压,将某时刻的功率与电压与前一时刻比较差值,利用模糊理论得到参考电压ΔUref,再将根据这一ΔUref更改的输出电压U(n)输入控制器2,并取理论最大工作点时刻的电压与参考电压的差值E(n),经由模糊PID 控制得到输出信号,与三角脉冲比较后调节DC-DC 电路占空比,最终调节光伏系统的输出电压与功率,使其在外界变化时仍可以较好保持在最大功率点。降低追踪误差。 双模糊控制具体流程图如图7 所示。 图7 双模糊控制流程图 为验证本方案的可靠性和准确性,在MATLAB/Simulink中搭建模型并进行仿真,仿真电路如图8 所示。 图8 光伏发电系统仿真模型 设定仿真时间为0.5 s,为考验系统的适应能力,在0.25 s时候光照强度由600 W/m2突增到1 000 W/m2,并分别采用三种不同的MPPT 控制方法进行仿真,即:传统定步长扰动观察法、单模糊控制方法和本文提出的双模糊控制与PID 结合的控制方法。得出的仿真结果如图9~11 所示。 图9 传统扰动观察法的仿真波形 图10 基于单模糊控制的扰动观察法的仿真波形 图11 添加电压增益的基于双模糊控制的仿真波形 比较仿真结果可知:当采用传统的扰动观察法时候,在0.050 1 s 时可追踪到最大功率点,且在进入最大功率点之前出现多次震荡,在追踪到最大功率点之后功率输出不稳定,围绕最大功率点上下小幅波动;而在单模糊控制策略中,在0.025 5 s 时即可追踪到最大功率点,且最大功率点处保持平稳,但是在光照强度变为1 000 W/s 时,输出功率平稳在120 W 左右,但是理想最大功率点为139.8 W,此时控制器追踪不到最大功率点;采用本研究提出的双模糊与PI 结合的控制器时,在0.022 s 时追踪到最大功率点,响应速度较快,在最大功率点处保持稳定,无明显波动,且在此之前没有震荡,而当光照强度突增之后控制器可迅速做出回应,用极短的时间追踪到最大功率点139.8 W。 与文献[17]提出的双模糊控制器相比,本控制器的模糊输入、模糊规则和输出不同且有所改进,在进入最大功率前抖动较轻,光照改变时响应速度和精确性增强,说明该方法具有良好的实时跟踪效果。 本文对传统的光伏发电系统提出了一种双模糊控制与PID 控制器结合的MPPT 方法。该控制器对传统扰动观察法进行改进,模糊器的输出分别为参考扰动电压ΔUref和占空比ΔD,可以针对外界环境的变化实现变步长控制,确保最大功率跟踪时的灵活性和响应速度,同时PID 控制器可减少误差,提高跟踪精度。经MATLAB/Simulink 仿真,与传统扰动观察法和单模糊控制策略对比后证明了该方法的高效性和可靠性。
3.2 占空比环节


3.3 双模糊控制

4 系统建模与仿真

5 结论
