仿生八自由度四足机器人仿真与结构设计
2021-07-06付晓云王欣威
付晓云,王欣威,慕 丽
(沈阳理工大学 机械工程学院,沈阳 110159)
在自然界或现实生活中,存在许多人类无法到达的地方和可能危及人类生命的特殊场合,如原始森林、地震救援现场等。对这类复杂区域的深入了解与研究,往往需要机器人的介入。相比于轮式和履带式机器人,足式机器人的着地点是分散的,可以根据检测与计算在地面上选择最佳的支撑点,因此足式机器人对崎岖路面、复杂地形具有很强的适应性。其中,四足机器人是一种对复杂地形和环境具有高度适应性和实际工程应用价值的移动式机器人,比双足直立行走机器人的承载能力强、稳定性好;又比六足、八足步行机器人结构简单。因此,受到科研人员的普遍重视。
近年来,有一系列仿生机器人出现,通过模仿生物的运动方式进行相应的结构运动,出现了关于仿生类足式机器人的研究[1];足的数目与其载重能力相关,足数越多载重能力越强,但运动速度越慢,因此四足机器人具有较好的适应性和灵活性[2]。本文所设计的四足机器人除实现前进、后退、左转和右转等基本运动外,还加入传感检测设备来实现四足机器人的搜寻探测、避障运输等功能。
1 总体方案设计
1.1 四足机器人的设计
四足机器人是典型的机电一体化产品,主要包括图1所示四个部分。采用以机械系统动力学自动分析软件(automatic dynamic analysis of mechanical systems,ADAMS)为主的现代机械设计方法,先在Solidworks中建立模型,然后导入ADAMS进行仿真;同时验证其运动功能并改进机械结构,再根据仿真结果搭建实际机器人的机械结构。

图1 四足机器人架构
本次设计的四足机器人在完成前进、后退、左转和右转等基本功能的基础上,能实现搜寻探测和避障运输等多种自动控制功能,通过上位机实现四足机器人功能的控制,包括手动控制和自动控制两种方式。
1.2 四足机器人的步态设计
机器人的步态是指机器人各个腿关节及相应的配合关节的支持状态与转移状态随时间变化的顺序集合。对于匀速前进的机器人,步态呈周期性变化,这种步态称之为周期步态;而能根据传感器获取地面状况和自身的姿态,进而产生实时步态的被称为随机步态或实时步态。一般情况下,要求机器人在实现运动的基础上,能够维持稳定的状态。因此,机器人在行走时必须有不少于三条的支撑足来平衡自身机体,且重心的投影必须在 3 或 4 个支持点所围成的多边形内。基于以上要求,机器人的动力学设计运用ADAMS进行结构的运动学与动力学仿真。本文的四足机器人运动采用仿乌龟“八”字步态设计,从而实现需求的运动步态;斜对角的两只腿同时转动或同时支撑,在控制运动时呈现出“八”字状态,在两侧看来内八和外八交替进行。直行步态结构如图2所示。

图2 直行步态结构设计
图2中,以头部左侧髋关节为1号,顺时针排1~4号,同理,以头部左侧膝关节为5号舵机,顺时针排5~8号。
直行运动步态包括以下四个步骤。
第一步:所有舵机全部处于所调位置起始部位,等待运动。
第二步:2、4舵机斜对角支撑腿着地并向后滑动,在和地面接触时依靠摩擦力推动四足机器人前进;同时1、3号摆动腿抬起,并向前摆动。完成半个步态的前进。
第三步:所有舵机皆处于所调位置起始部位,等待运动。
第四步:1、3舵机斜对角支撑腿着地并向后滑动,在和地面接触时依靠摩擦力推动四足机器人前进;同时2、4号摆动腿抬起,并向前摆动。完成整个步态的前进。
1.3 四足机器人的总体控制方案
采用myRIO控制器和上位机编程,设计一款无线控制的、能手动和自动功能切换的多功能仿生四足乌龟式机器人,上位机控制界面如图3所示。
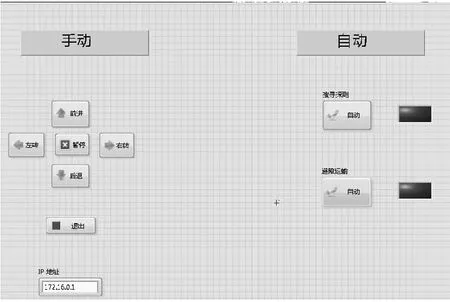
图3 上位机控制界面
myRIO控制器能实现传感器信号采集、舵机控制、通信等功能。上位机基于Labview编程,采用生产者与消费者模式设计控制软件,对myRIO无线控制并多线程运行;以Labview中的网络流技术实现无线控制与数据传输功能、上位机与下位机的数据交互。
在四足机器人的控制中,前进、后退、左转与右转是四足机器人的基本运动,同时也是最重要的一个控制程序。作为上位机的手动控制面板,前进、后退、左转和右转的功能必不可少;在上位机选择每个功能按钮,按下时将会触发一个事件的程序,每个事件结构下有一个不同的值。事件结构触发后,会通过网络流将上位机的数据传送到下位机,下位机在接收到不同的值时,依次进行判断并找到与传输值相同的子程序执行。进行自动控制时,数据传输的过程与手动过程基本一致,将手动控制与自动控制放在同一程序中,并且实现手动与自动等多种功能的切换是本控制方案的一个重点部分。
四足机器人利用传感器检测周围障碍物,当识别到前方有障碍时,将会依靠传感器判断障碍的大小,并选择避障路线。
2 机械结构的建模与运动学仿真
2.1 机械结构的建模
利用SolidWorks进行四足机器人的三维实体建模,找到结构的缺陷,修改设计方案,确定最终设计方案,如图4所示。

图4 四足机器人总体设计方案
2.2 运动学仿真
在确定结构设计方案,完成三维建模基础上,运用ADAMS进行结构的运动学仿真,仿真的主要内容包括:已知各关节变量,求机器人在X、Y、Z方向用2s行走一步的位移、转动速度、各个关节的运动曲线,检验机器人能否满足在一定空间内工作的要求,同时验证运动的准确性和平稳性。
将四足机器人三维结构导入ADAMS,添加相应的约束和运动副,添加驱动,完成四足机器人在ADAMS中建模,模型如图5所示。
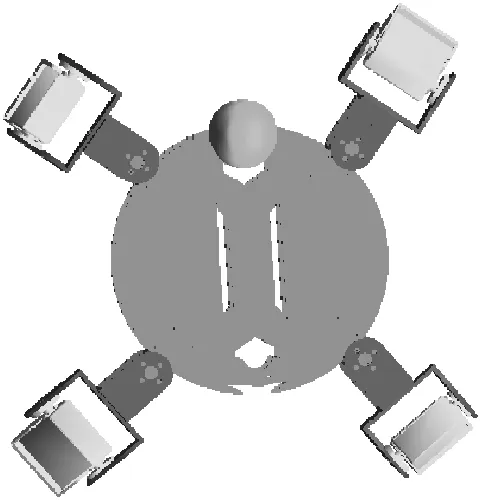
图5 四足机器人在ADAMS中的模型
在搭建好结构与设置好约束和运动后,进行仿真分析。对单个舵机的运动参数位移、速度、加速度仿真结果如图6~图8所示。

图6 位移曲线

图7 速度曲线

图8 加速度曲线
由图6可以看出,机器人的运动位移基本为线性,只有少许波动,所设计的机器人运动步态较为平稳,基本达到了设计要求。由图7和图8看到,舵机的运动速度曲线、加速度曲线有一定的突变,对于机器人运动会造成一定程度的影响,同时会对舵机造成冲击,进而影响其使用寿命[3]。因而,在使用中要进一步完善对驱动函数的设置。
3 四足机器人硬件结构设计
3.1 硬件设备控制器和传感器及执行机构
3.1.1 myRIO基本架构
采用美国国家仪器公司的myRIO-1900作为四足机器人控制器,该控制器提供10条模拟输入,6条模拟输出,40条数字输入和输出[4];支持SPI、I2C、UART和PWM输出等功能,此外myRIO-1900可通过USB和无线方式实现与编程设备的连接。图9为myRIO基本架构图。

图9 myRIO基本架构
3.1.2 所用主要传感器
采用红外测距仪实现位移检测[5];选用超声传感器实现避障功能;配备必要的视觉传感器摄像头[6];红外传感器在使用前需要对其输入输出参数和测量范围进行标定[7]。
3.1.3 执行元件舵机介绍
根据运动要求,仿生机器人选择标准舵机作为执行元件。本文选用乐幻索尔公司生产的180°机器人DIY LDX-218舵机,该舵机为金属齿轮数字舵机,控制精度高、线性度好、响应速度快[8]。
采用PWM信号实现对舵机转动的控制,利用输入到电机的占空比来改变作用在电机两端平均电压的大小,进而控制电机的转速。转速与占空比理论上为线性关系;在实际应用中需要对其参数进行标定。
3.2 机械结构搭建
根据仿真结果,利用机械部件搭建四足机器人。依次搭建四足机器人的上部分和四条足,并连接两部分完成四足机器人的完整结构,如图10所示。
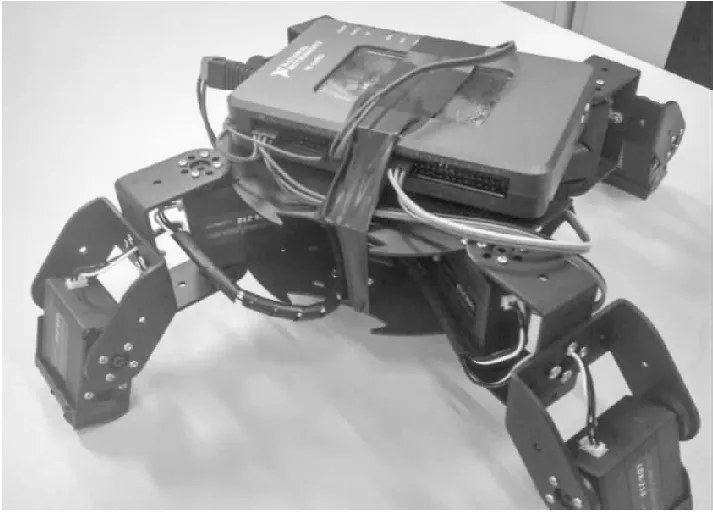
图10 四足机器人实物
4 控制功能与实现
4.1 利用网络流,实现无线控制
为实现上位机对myRIO的实时操作与控制,利用网络流功能,通过无线传输协议,将上位机的数据传输到控制器中,实现上位机与下位机的通信,进而完成对下位机的控制[9]。
4.2 舵机并联控制
四足机器人采用舵机并联的驱动方式,使整个程序占用较小的内存,运行速度加快。采用模块化的编程技术,将8个PWM及其数学转换式转换成一个子程序,在调用时,仅仅输入几个控制角度的参数即可[10]。
4.3 舵机基本运动程序
在四足机器人的控制中,四足机器人的前进、后退、左转与右转是最基本、最重要的控制程序[11]。运动时,支撑腿着地,控制舵机角度使其摆动腿悬在空中,这样摆动腿在下降时,原支撑腿准备抬起,从而在和地面接触时依靠摩擦力推动四足机器人前进。以左转运动为例,展示基本运动的控制程序,如图11所示。
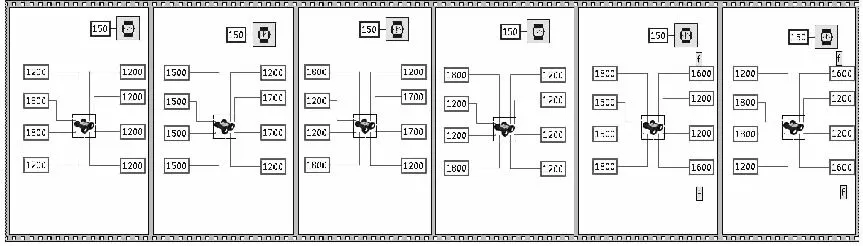
图11 左转控制程序
4.4 搜寻探测程序
利用搜寻探测功能可完成对人类不便或不能到达区域的探测活动,图12为搜寻探测所示部分程序。

图12 搜寻探测部分程序
4.5 避障运输程序
四足机器人在识别到前方有障碍时,会依靠传感器判断障碍的大小,并选择路线避让,且能根据障碍的大小做出相应的计算,程序如图13所示。
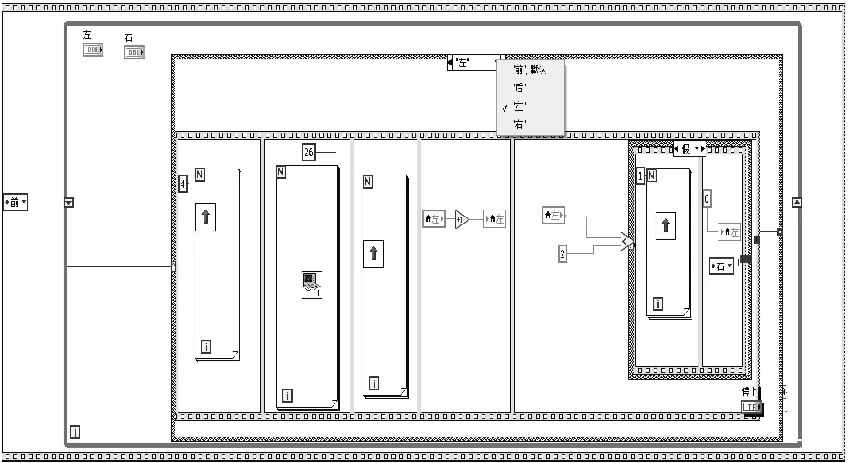
图13 避障程序
5 结束语
设计的仿生四足机器人实现了前进、后退、左转、右转等基本运动。此外利用Labview2016编写程序,加入传感检测器实现了四足机器人的搜寻探测、避障等功能。本文的研究对后续深入研究足式机器人的功能控制及应用可行性具有较好的参考价值。
