基于参差中重频脉组的搜索雷达跟踪波束设计*
2021-06-26朱永杰薛广然
朱永杰,苏 巧,严 超,薛广然
(1.西安电子工程研究所,西安 710100;2.陆装驻西安地区第六军代室,西安 710100)
0 引言
搜索雷达在现代战争中肩负着指定空域的监视任务,对空中目标进行搜索、发现和跟踪,并将目标位置信息提供给防空武器系统。随着制导技术的不断发展,有些搜索雷达可直接为武器系统提供中制导信息。因此,搜索雷达对目标探测的稳定性和探测精度提出更高的要求,尤其是对于已进入拦截火力分配通道的目标。传统搜索雷达采用边搜索边跟踪(TWS)模式,对监视空域进行波束顺序扫描[1-2],雷达空间资源配置固定,数据率偏低。在强气象、地物杂波及电磁干扰环境下,易出现目标检测概率下降、航迹拉偏断航等状况,难以满足武器系统对特定目标持续稳定跟踪的要求[3]。针对上述问题,本文提出为搜索雷达设计跟踪波束,对特定目标采用基于目标预测信息的多组参差中重频检测方式工作。通过设置多组中重复频率探测波形组合,可以有效扩展速度检测清晰区范围,相对常规的低重频探测波形,能够有效抑制慢速气象杂波及强地物杂波剩余,并改善因速度模糊导致的检测性能下降;通过预测信息实现目标距离、速度双模糊的快速解算,提高探测精度(速度精度);同时,跟踪波束对特定目标进行空域集能处理,有效地增加目标观测能量和观测数据率,提高特定目标的检测概率[4-5]。
1 跟踪波束设计
某技术体制为方位机械旋转加俯仰维相扫有源三坐标雷达,主要作战模式下,天线以15 r/min 的转速在方位上匀速转动,根据被观测目标的仰角位置的不同,波束在俯仰上通过电扫顺序发射x 个波束宽度约为6°的发射波束,形成2x 个宽度约为3°的接收波束,对要求空域进行覆盖,该雷达在当前作战模式下无跟踪波束。
针对该雷达上述作战模式需求,设计跟踪波束,当被跟踪目标释放有源干扰或需要对某一目标重点关注时,牺牲对该目标所在方位上其他仰角区域的空域监视,对该干扰目标实施集能工作方式,即天线在方位上旋转到目标所在角度时,波束在俯仰角上不再扫描,而是将方位波束驻留时间内的所有能量集中在被观测目标上,实现重点目标的跟踪。其处理流程如下:
1)雷达在传统TWS 搜索模式下获得目标航迹;
2)发现需特别关注的目标后,通过终端控制进入跟踪模式,输入需进行跟踪的目标批号;
3)终端通过数据处理预测该目标下一帧位置,并在天线扫至该目标前向信号处理及前端预置方位、俯仰信息;
4)当天线扫至预置方位时,雷达由俯仰顺序扫描方式变为采用中重频脉组的固定波束,该波束指向为数据处理预测俯仰波位;
5)信号处理按组进行MTI-MTD 处理,CFAR检测后输出目标信息;
6)信号处理根据数据处理的预测信息对实际探测的目标信息进行距离、速度解模糊;
7)信号处理对探测多次的目标信息进行凝聚,并输出给终端;
8)终端的数据处理进行点迹关联处理,最终形成点迹并显示。
2 基于目标先验信息的波束调度设计
数据处理收到信号处理发送的目标点迹数据后,剔除虚假航迹,经滤波相关后形成目标的真实航迹,并预测目标下一帧位置。雷达进入跟踪模式后,在需跟踪目标所在方位采用固定波位探测方式,其他方位仍然使用顺序扫描方式。启用固定波位探测方式,需要根据航迹预测结果确定启用固定波位探测的方位角,同时设定波束的俯仰指向角。
启用固定波位探测方式的天线码盘转角,按照下式设计:

其中,Preazimuth 为跟踪目标预测方位角,Azimuth-Code 为方位码盘,Amend 为修正量,补充因处理和通信延时引起的指向滞后问题,BeamWid 为雷达方位波束宽度,满足该条件时启用固定波位探测,否则采用顺序扫描方式。
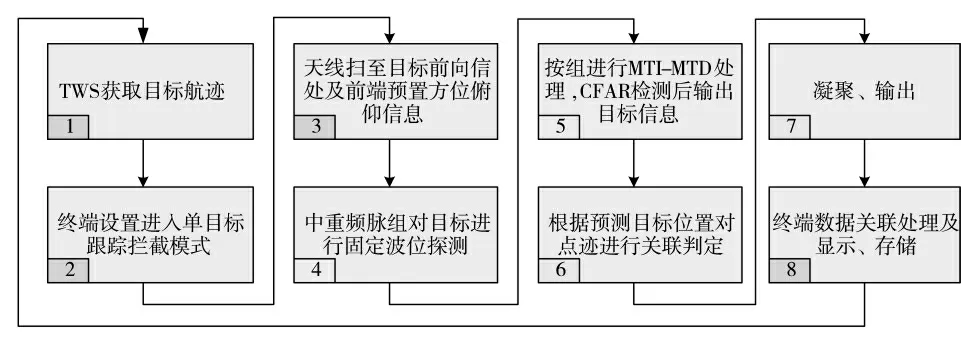
图1 跟踪模式处理流程

3 中重复频率波形设计
在对跟踪目标进行固定波位跟踪探测时,采用中重频探测波形[7]。根据时序设计要求,方位驻留时长与原搜索模式的顺序扫描保持一致,在驻留时间内,设计4 组脉冲串进行探测:第1 组为低重复频率脉冲串,含8 个脉冲,进行距离不模糊探测(简化解模糊);后3 组为频点和PRF 都不同的中重频脉冲串,每组按16 个脉冲设计,采用2 点MTI(或3点MTI)级联16 点FFT 滤波器处理。如表1 所示。
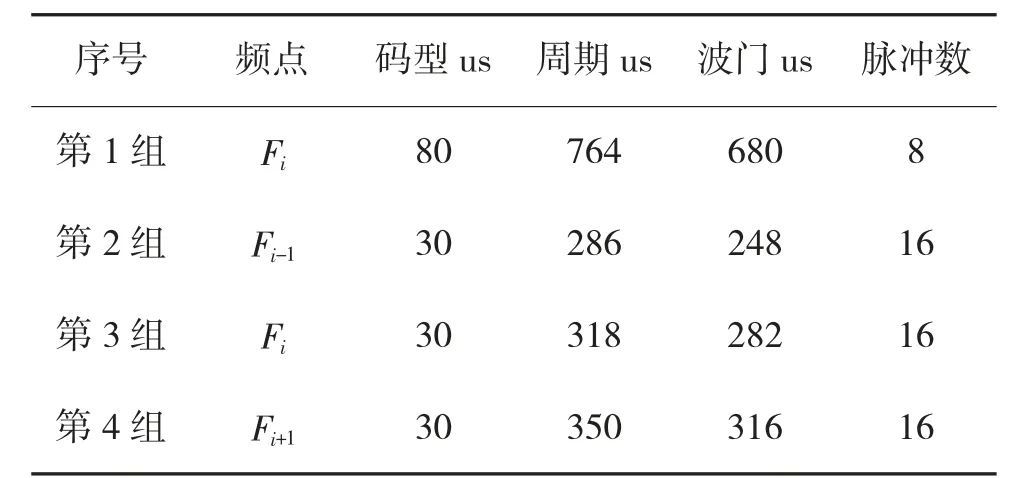
表1 跟踪模式下的波形设计
采用如上所述3 组MPRI 的滤波器联合响应仿真结果如图2 所示,反应雷达RD 探测特性的斑马图如图3 所示。由仿真结果知,采用3 组MPRI 的时序配置可有效降低目标落入盲速区所带来的影响,具有较好的探测覆盖能力,再加上第1 组的常规探测脉冲,能够较好地实现目标跟踪探测。
该设计相较于传统低重频顺序扫描的探测,在一个方位驻留内可进行4 次检测,若雷达单次检测概率为90%,则理论上可将该方位驻留内的检测概率提高至1-(1-90 %)^4=99.99 %;多组MFRI 让雷达具有更大的速度清洁区以及更好的低速杂波抑制能力,提高单次测速能力和测速精度。

图2 3 组MPRI 滤波器联合响应
4 目标先验信息的距离/速度解模糊
图3 3 组PRI 形成的探测斑马图
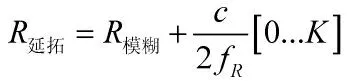
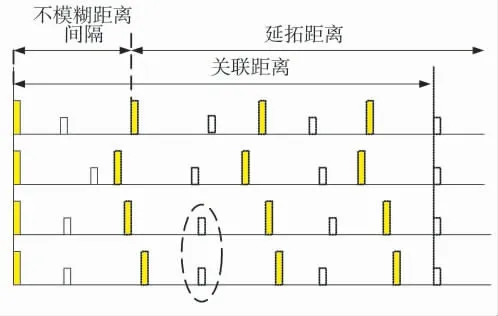
图4 距离解模糊方法
如果单视处理中有不止一次的目标检测,或者在单视处理中目标检测与另一类不同目标发生相关,相关处理得出的距离可能并非是真实距离,此所谓距离幻影现象(如图中圆圈中)。通常使用附加的准则来排除距离幻影,如选择M/N 比值最高的相关距离(其中,M 为检测报告次数,N 为PRF 重数),选择M 个检测中方差最小的检测判决等。但此类算法实现较为复杂,因此,采用一组距离不模糊的低重频PRF 和3 组距离模糊的中重频PRF 探测目标,相关处理运算量变的简单,如图5 所示。
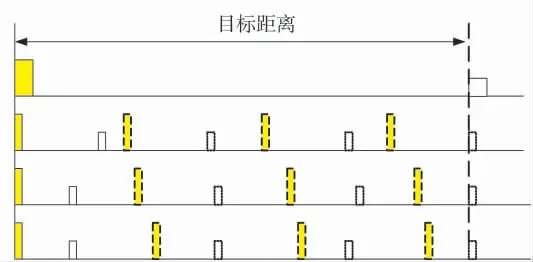
图5 低重频PRF 和中重频PRF 配合解模糊示意图
5 试验验证
为了验证跟踪波束设计对搜索雷达特定目标探测性能的提升,将该搜索雷达按照本文设计进行改进,增加跟踪模式。该雷达在对S200 靶机绕飞试验中,靶机飞出段采用常规搜索模式,进入段改用参差MPRI 波束的跟踪模式。
选取检飞过程中同一强杂波点在不同重频下的多普勒频谱,由图6 可知,通过将重频的增加,能够将杂波的基底电平降低7 dB 左右,同样提高目标的发现概率。
检飞过程中检测情况如图7 所示(图为雷达实际PPI 画面截屏),图中白色点表示雷达未检测到目标情况下数据处理外推点,常规搜索模式下,雷达多次出现“丢点”情况;在跟踪模式下,雷达只在盲区附近出现一次“丢点”,由对比知,采用参差MPRI波束的跟踪模式使雷达特定目标的检测概率大大提高。对S200 靶机,战斗机等多机型、多架次检飞试验数据进行统计,跟踪模式下雷达检测概率能够有效提升,测试可达98%以上,原状态下检飞时跟踪上述类型目标,检测概率均值为81%。图7 为一次S200 靶机实际飞行过程雷达界面的截屏图。靶机背离过程中,采用原工作模式跟踪,全程丢检测一次点迹7 个;靶机由背离阵地调转航向变为进入阵地状态后,采用中重复频率的跟踪模式跟踪该目标,进入全程只丢失检测一次点迹1 个;而靶机近入时的RCS 较背离时小,会造成目标检测概率下降,但通过跟踪模式的使用,检测概率却有明显的提升。
6 精度分析
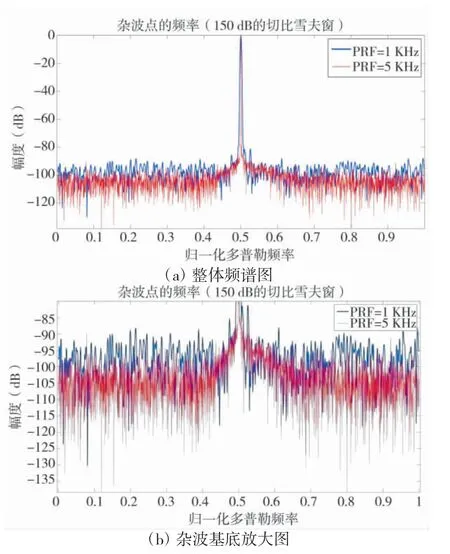
图6 强杂波点在不同重频下的频谱
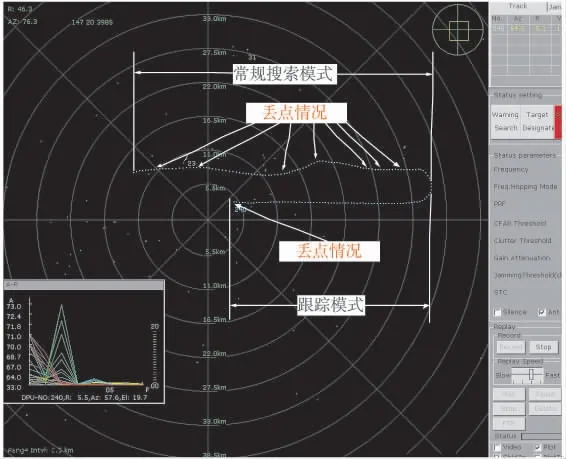
图7 雷达对靶机检测情况截图
对使用中重复频率的跟踪模式探测S200 型靶机的实际检飞数据进行精度分析。由于该靶机提供的真值数据中包括GPS 位置信息(LongTgt/LatitudeTgt/HightTgt)、GPS 速度(VgpsTgt)、航向(YawTgt)和俯仰角(PitchTgt)等信息,通过坐标转换将目标的GPS 位置转换为雷达坐标系的XYZ 值。然后,将目标的速度在大地直角坐标系中进行分解:


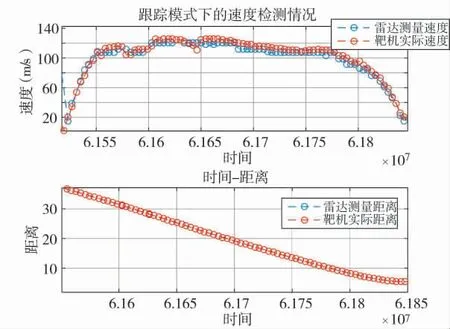
图8 跟踪模式下目标速度对比(机动目标)
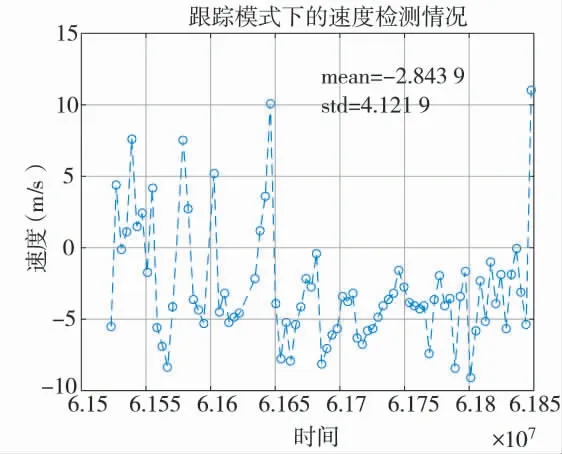
图9 跟踪模式下测速精度分析(机动目标)
从图9 可以看出,目标径向速度从20 m/s 到100 m/s 的变化(机动转弯造成径向速度的变化),中重复频率跟踪模式下测速的均方根值小于5 m/s。原模式下,由于使用低重频无法进行速度解模糊,因此,信号处理上报的点迹无速度信息。中重复频率的跟踪模式下给出点迹的速度信息,在数据处理中使用速度信息设计关联波门。从图中可以看出,中重复频率的跟踪模式下目标的测速精度较高,跟踪波门可以设计的很小,从而提高航迹关联的准确性,提升航迹质量[9]。
7 结论
经过多次检飞验证及结果分析可知,基于参差中重频脉组的跟踪波束设计,能够有效扩展雷达速度清晰区,改善因速度模糊导致的检测性能下降,提高雷达对特定目标的检测概率,并实现特定目标的高精度测速,提高目标的航迹质量,更好地满足武器系统对特定目标稳定跟踪的要求。
