一种姿态测量装置在迫击炮上的应用*
2021-06-26苏建斌段嗣宗
梁 栋,苏建斌,聂 鑫,孙 战,段嗣宗
(1.北方自动控制技术研究所,太原 030006;2.山西北方机械制造有限责任公司,太原 030009)
0 引言
迫击炮对目标进行瞄准时,通过装订前沿观测所计算出的射击诸元实施射击,射击诸元通常包括方位、表尺等数据。理论上,单炮通过装订射击诸元即可实施射击,但在实际操纵中,由于火炮后坐力大,自身稳定性差,在射击过程中非常容易发生位移和姿态的变化。该姿态测量装置能够使得迫击炮在射击后快速准确回到初始瞄准位置,进行下一步射击操作,大大缩短了瞄准时间,减小了在射击过程中由于火炮后坐力和自身稳定性等带来的影响。
1 设备组成
迫击炮瞄准装置主要由电子瞄准机构、机械瞄准机构、缓冲器、法兰及配套装备组成。整个瞄准装置重量控制在800 g 之内,最大外形尺寸177 mm×110 mm×129 mm,姿态测量装置安装在瞄准装置的电子瞄准机构中。瞄准装置配合迫击炮使用,该瞄准装置主要利用镜内平显瞄准标志(采用全息瞄准镜或红点瞄准镜)赋予射向,能够进行方向修正,具有射向保持功能;瞄准装置通过法兰与迫击炮连接装拆便捷一致,在发射冲击过载作用下状态稳定,具有机械测角机构,满足部队降级使用要求。
1.1 总体组成
姿态测量装置由惯性测量单元(以下简称MIMU)、采集解算单元和电源等部分组成。系统组成框图如图1 所示。
1.1.1 微惯性测量单元
微惯性测量单元(MIMU)由独立封装的高精度国产分离式MEMS 惯性元件构成,包含X、Y、Z 3 个轴向的MEMS 陀螺仪和MEMS 加速度计,具备三维空间角、线运动测量能力。陀螺和加速度计通过线路板结构组装,构成捷联载体正交坐标系。
1.1.2 采集单元
采集单元将微惯性测量单元中MEMS 陀螺仪和MEMS 加速度计输出的角速率、比力、温度等信息,通过同步数字接口采集处理,按照要求的时序通过串行总线统一发送至解算单元。
1.1.3 解算单元
解算单元以高性能ARM 作为处理器构架,用于对MEMS 陀螺仪和MEMS 加速度计数据进行误差补偿、标度预处理、设备时序控制,并完成瞄准装置初始对准、捷联惯导姿态解算、方位保持解算、数据收发等。
1.1.4 电源模块
电源模块对电池电压进行转换,为设备内部组件提供工作电源。
2 原理方案设计
2.1 温度误差补偿
MEMS 系统陀螺零偏和加速度计零位与温度相关,随着环境温度变化,输出随之改变,由此带来温度误差项。因此,必须对MEMS 器件的温度误差模型进行分析,并设计相应温度循环试验,对模型参数进行辨识,在获取MEMS 陀螺和MEMS 加表原始数据后,首先进行温度补偿。
典型的MEMS 器件输出与温度关系曲线如图2所示。

图2 典型MEMS 器件输出与温度关系
在进行标度变换之前需对陀螺零偏和加速度计零位进行温度补偿,在标度变换中扣除陀螺零偏和加速度计零位与温度相关项。温补系数为事先在可编程隔振温箱中,经过全温度循环试验建模,用最小二乘法求解得出的模型参数。
陀螺零偏和加速度计零位温度补偿模型如下:

式中,j 为X、Y、Z 轴,BgjT为陀螺温补零偏误差,NajT为加速度计零偏误差,p 为温度项阶数,xi为温度项,βgji为陀螺零偏温补系数,βaji为加速度计零位温补系数。
以MEMS 陀螺为例,经过温度补偿后陀螺零偏稳定性大幅提高,如下页图3 所示。
2.2 惯性组件参数标定
MEMS 惯性元件陀螺零偏、标度因数、安装误差角,加速度计零位、标度因数、安装误差角为事先在三轴转台上,通过分立式标定方法获得。计算模型如下:


图3 MEMS 陀螺温度补偿前后对比


2.3 方位姿态解算更新
基本原理如下:

相应原理图如图4 所示。

图4 系统解算原理图
3 硬件设计
3.1 惯性元件板
惯性元件板作为惯性传感器的承载,主要用于MEMS 陀螺、MEMS 加速度计数字信号传递,提供惯性传感器相关外围电路,满足捷联惯性坐标系的正交性要求,如图5 所示。

图5 惯性元件板设计方案
3.2 采集解算板
采集模块实现3 路MEMS 加速度计、3 路MEMS 陀螺的比力、角速率、温度输出信号的采集、滤波、误差补偿。采样值通过SPI 数据总线传送至SPI MASTER 控制器。如图6 所示。

图6 采集模块设计方案
解算模块主要实现系统解算、通讯接口扩展、时序控制等功能,以STM32F429 为基础构架,设计方案如图7 所示。
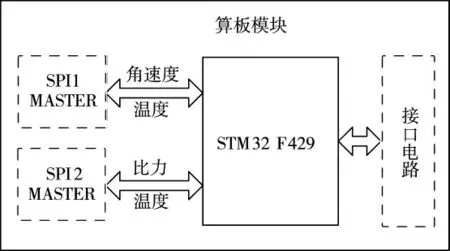
图7 解算板设计方案
4 软件流程
4.1 准备阶段
设备开机即进入准备工作阶段,该阶段不进行姿态解算,并需要保持设备静止,主要用来初始化以及测量MEMS 陀螺的漂移,防止设备移动导致陀螺漂移估计失效,以用于补偿陀螺输出。
4.2 工作阶段
准备阶段结束后,进入MEMS 姿态解算过程,根据陀螺和加速度计的输出,同时对陀螺漂移进行常值漂移补偿和温度补偿,以及对加速度计进行温度补偿,利用四元数实时解算姿态角。
设备软件流程图如图8 所示。
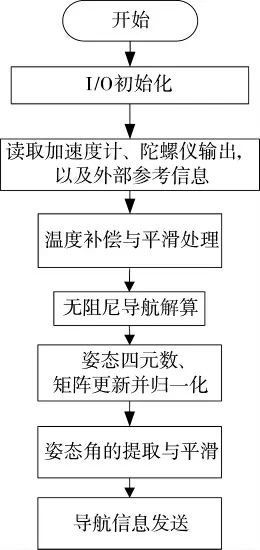
图8 系统的软件流程图
5 结论
姿态测量装置是以微机电(MEMS)惯性传感器为核心元器件,研制的MEMS 类高精度、小体积、低功耗惯性测量设备,具备自主姿态保持能力,可对外提供装置的方位、水平姿态信息。在迫击炮瞄准、射击的过程中,作为辅助设备构成可靠的坐标系统,使迫击炮使用更加便利和高效。
