“蓝疆”船推进器电控系统浅析
2021-06-25刘晓君
刘晓君
(海洋石油工程股份有限公司安装事业部,天津 300450)
“蓝疆”船电力推进器的电控系统主要包含电力驱动部分和舵机控制部分。电力驱动系统为交流电机控制系统,采用PWM变频技术,实现高压大功率及高速驱动,适宜在恶劣条件下工作,并能获得和直流电机控制系统相媲美的控制性能,电力驱动部分由ANSALDO变频驱动系统组成。舵机控制由LIPS提供,用于实现舵机角度和转速等控制。
1 ANSALDO变频驱动系统
“蓝疆”船推进器驱动系统调速方式采用交-直-交变频调速控制系统。变频器主要由整流器、逆变器及其附属器件和相应的控制系统组成。
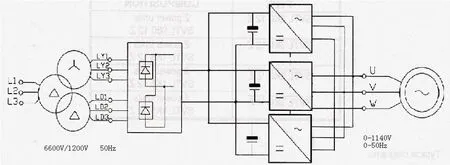
图1 变频调速原理图
1.1 整流单元
整流电路采用电容滤波三相不可控整流,当某一对二极管导通时,输出电压等于交流侧电压中最大的一个,该线电压既向电容充电,也向负载供电;当没有二极管导通时,由电容向负载放电,直流侧电压按指数规律下降。为降低谐波对船舶电网的影响,变压器的副边接成Δ和Y,减少谐波的影响。在直流侧,电压纹波因数随着脉波数的增加而降低。
1.2 预充电回路
预充电回路是SVTL 4K5 1200A系统的重要组成部分,包括:单相电源、隔离器、预充电接触器、220V/1350V变压器、单相整流桥等。
预充电回路在系统主电源启动之前,首先建立一个高电压、小电流对系统电容进行充电,当电容电压达到系统额定的80%时,主电源启动。当预充电开始,母排电压逐渐增大,此时发送给控制板一个DRIVE ENABLE信号;系统也对母排电压进行测量,当电压达到设定值时,宣告预充电可以结束,系统主开关闭合,预充电接触器断开。
1.3 逆变器
驱动配电柜采用的是SVTL 1200V系列产品。SILCOVERT SVTL4K5 12A是由IGBT构成的电压源逆变系统。
1.3.1 逆变器构成
电源部分由3个三相逆变系统并联组成,包括:9个单相逆变模块,电流互感器,直流电压互感器和三相输出电感。逆变模块的水冷单元,由冷却液通过热交换器进行热量交换。
经过逆变器后输出电压是脉冲形状的,而对驱动电机来说则希望输入电压是正弦形状,因此在逆变器输出与电机输入之间必须加一个滤波器。对V/Hz控制方式来说,LC滤波比较适用,而对FOC控制方式LC滤波则不能达到所期望的效果。本系统的控制方式是V/Hz和FOC相结合,因此选用纯电感滤波。
1.3.2 逆变器控制部分

图2 驱动控制单线图
控制电路主要包括电源、控制电路板、接口电路板(电流、电压、IGBT触发脉冲和监视信号)。控制部分的电路与电源部分完全隔离,用具有霍尔效应的电流、电压传感器采集的信号作为反馈信号,用光纤来传送触发和监控IGBT的信号。采用的SVTL 4K5 12A控制部分主要包括以下部分:
GA1,GA2:INTVECTA3B、INTVECF04A、接 口 卡、TA、TV的电源。
ALIM:CONVEC1D卡电源。
CONVEC1D:CPU卡。
INTVECTA3B:场信号接口和触发脉冲转换器用于由3个逆变器并联组成的驱动器。TA和TV的负载电阻位于INTVECZAV卡,提供最大输出电流和最大直流电压的硬件脱扣。
INVECF04A:触发脉冲转换器用于由3个逆变器并联组成的驱动器,实现触发脉冲的光电转换和IGBT的触发监控信号的接收。
此外,控制系统还包括数字I/O 扩展卡和制动控制板。
(1)脉冲触发板(TGUNTHA Firing Card)
触发信号由控制板(CONVEC1D)发出,经过INTVECFO4A板电/光转换,变成光触发信号,通过光纤传送到TGUNTHA Firing Card,TGUNTHA Firing Card把光触发信号还原为电触发信号,并把该信号送到IGBT的门极上;该触发板控制系统还对模块工作状态的监视,触发板把所得到的信息通过另一条光纤回馈给INTVECF04A板,最终把信号传递给控制板。
(2)主控制板(CONVEC1D CPU)
主控制板(CONVEC1D CPU)是控制部分的核心,发出各种指令,且通过各种外围接口电路接受开关、传感器和互感器的信号。控制板内的微处理器可实现高速输入和高速率传输数据,专门处理以运算为主且不允许延迟的实时信号以及各种矢量计算,板卡上的7段发光二极管可以显示驱动器状态、事故保护的中断等。
(3)负载电阻电路板(INTVECTA3B/INTVECZAVD)
逆变器配有霍尔效应的电流、电压互感器,并有相应的负载电阻,可以监控逆变器的输出电流和电压。INTVECTA3B把通过电压、电流互感器信号转换成对应的信号,再把信号加载在INTVECZAVD上的负载电阻,通过电压表测量负载电阻的电压值,乘以对应的倍数,便可以得到对应的电压、电流值。
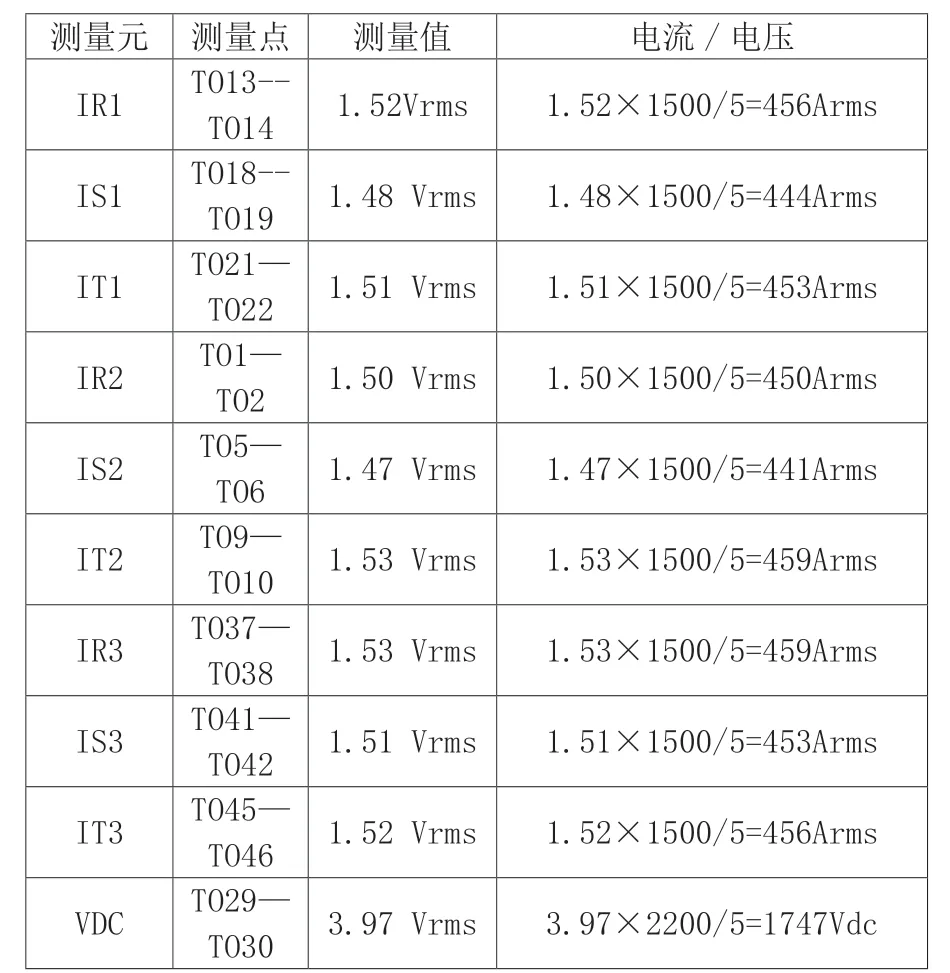
表1 电压、电流值对应表
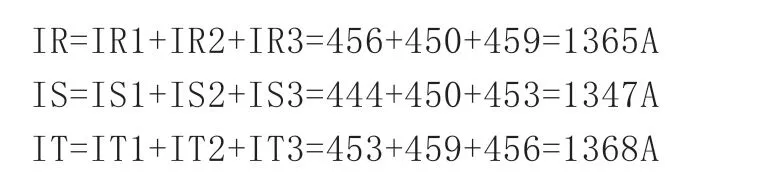
因此,我们可以得到:
(4)触发脉冲信号转换板(INTVECFO4A)
把控制板(CONVEC1D CPU)发出的电触发信号转换成光触发信号,并通过光纤送给脉冲触发板(TGUNTHA Firing Card)。
接收脉冲触发板(TGUNTHA Firing Card)对模块光监视信号,并把光监视信号转换成电信号,最后把信号送给控制板(CONVEC1D CPU)。
(5)数字I/O扩展卡(DIGITAL I/O EXPANSION CARD)
数字I/O扩展卡有8个并排的绿色报警指示灯,指示灯可显示内部和外部的影响到配电的8个状态。若条件不满足,则不允许供电,指示灯的序号对应KEYPAD内部的报警代码。
1.4 电气制动系统
宏观上看本系统采用的是能耗制动,而从直流母排到驱动电机来说则属于回馈制动。在制动的过程中,电机产生的能量有一小部分消耗在电机和逆变器上,而剩余的则存在滤波电容上,如图3所示。
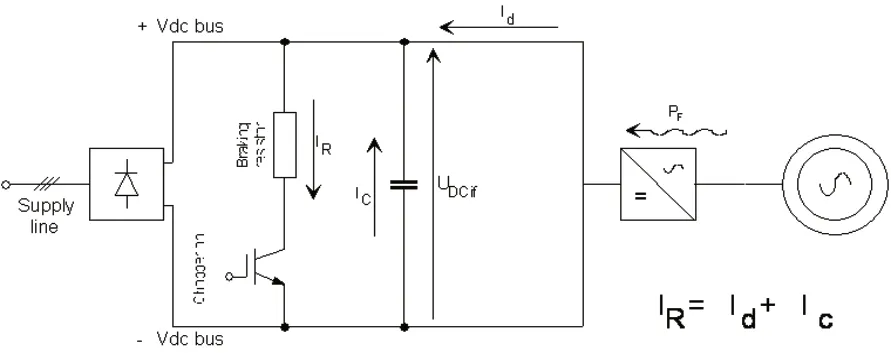
图3 电气制动原理图
随着能量不断增加,电容上的直流母排的电压不断升高。当母排电压升高到设定的最大值时,充当开关作用的Chopper Module导通,此时能量通过电阻发热释放;随着能量释放,母排电压降低,当降到系统设定的最低值时,Chopper Module便截止,系统不再释放能量。图4是电容的电压及电流、电阻电流随Chopper导通或截止相应变化的波形图。

图4 电容电压、电流及电阻电流在不同状态下的波形图
2 LIPS控制系统
“蓝疆”船操舵控制装置是采用LIPS控制系统,控制舵机和推进器转速。推进器转速调节主要由ANSALDO电力驱动部分完成,LIPS控制部分主要是给推进器转速发出控制信号。
2.1 LIPS控制系统基本原理
由于“蓝疆”船定位于无动力船舶,推进器主要起辅助推进作用。舵机的控制主要是随动控制和应急控制,即FU(FOLLOWING-UP)操作和NFU(NON-FOLLOWING-UP)操作。
FU控制原理:随动操舵是螺旋桨转动的角度能自动跟踪手轮或手柄发出的操舵角度。系统主要有检测和转换装置、比较装置、放大装置、执行机构及调节对象等五个部分。LIPS控制系统为电位器式随动操舵装置。手轮或手柄带动的操纵电位器发送操舵信号,而舵轴带动的反馈电位器检测螺旋桨偏转的反馈信号。比较装置是平衡式装置,输出反映给定信号和反馈信号的偏差,其偏差信号就是放大装置的控制信号,使执行机构动作,带动螺旋桨偏转,转动方向取决于偏差信号的极性。
NFU控制原理:NFU操作即单动操舵,操舵系统简单可靠。在本系统中,操舵是通过驾驶上操舵摇杆向左、向右方向扳动,或通过当地控制屏上两个按钮切换电路,实现左右转舵,同时观察舵角指示器。
2.2 LIPS控制系统组成
LIPS控制系统主要由以下几个部分组成,如图5所示。
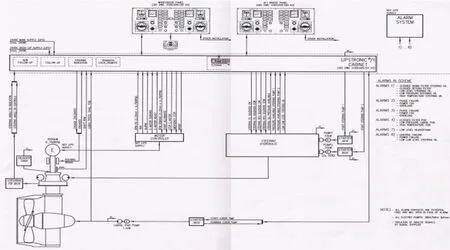
图5 MMI/PROCESS
2.2.1 LIPSTRONIC/T CABINET
该控制系统是整个LIPS控制系统的核心部分,主要由处理器板、输入输出板、电源及外部控制继电器等构成。用于实现舵机的跟随控制、当地/遥控模式选择、泵的启停和相应的指示。
2.2.2 驾驶台控制屏
对舵机和电机的转速发出控制指令;通过非跟随控制电路来控制舵机;泵的启停及相应的指示。
2.2.3 AFT控制屏
对舵机和电机的转速发出控制指令;通过非跟随控制电路来控制舵机;泵的启停及相应的指示。
2.2.4 报警系统(非LIPS提供)
若控制系统发生故障,可以在集中报警系统中体现。
2.2.5 舵机反馈盒
舵机反馈盒里有2个变阻器,它们都能真实的指出推进器的位置,其中一个是用来作为反馈信号而加入控制回路中,另一个则用来当指示信号。变阻器内有2个三角形接触电刷,且阻值约为2KΩ。
2.3 控制系统的操作
操作控制点的选择通常是通过安装在LIPSTRONIC/T 控制面板上的选择开关来完成的。给控制系统供电,同时打开其内部开关,此时控制系统可用。当供上电之后,要确保其它电路的开关也是处于闭合状态。
2.3.1 REMOTE FOLLOW-UP操舵
在该模式下,规定0度处在正前方位置,顺时针方向为正方向。当转舵时,系统通过某种计算法则计算出当前位置到达设定位置的最短途径,舵机便朝着这条途径转动。
2.3.2 REMOTE NON FOLLOW-UP操舵
在该模式下,舵机受控制面板的备用电路控制,而备用电路则不受微电脑控制。
2.3.3 当地NFU操舵
在当地操舵只能通过安装在“WHEELHOUSE PANEL”上的按钮CW和CCW来调整推进器的位置。当地NFU操舵的电路同样不受微电脑控制。