对未来车载修井机发展的分析与研究
2021-06-25王树森田燕朱建祥
王树森,田燕,朱建祥
(中国航天科工集团有限公司宏华集团,四川 成都 610036)
1 目前石油修井机的现状
1980年我国揭开了石油修井机的发展序幕,经历了40多年的发展,我国修井机技术已经从最初的仿制国外技术到如今已经可完全自行研发各种特色的修井设备。
如今,修井设备都各自特点,各有所长。普遍是大公司因规模庞大,实力雄厚,还只集中在大吨位修井机方面,先进化程度并不高,对一些小型或中小吨位修井机并不够重视,自走式轻载修井机无论在精细程度,专业化程度还是价格方面都不具备竞争优势,如:我们熟悉的激励车(英文名Flush-by rig,轻便快捷修井作业车),几乎都是被北美和欧洲企业所垄断。
传统结构的重载石油修井机各企业都有各自的特点,结构上大同小异。这些设备动力一般都采用柴油发动机驱动,通过底盘上加装动力及井架和绞车等设备,利用绞车钢丝绳提升系统作业,对井眼管柱不具有下注力。
随着我国对环保要求的重视、道路运输法规的贯彻、洁净能源政策的推行,各油田根据自己的实力,都对当前传统的重载石油修井机都做了一些创新,大概体现在以下三个方面:
1.1 网电及双动力驱动
油田实力不断提高,油田电网也得到合理的规划和架设,设计制造厂家更加注重对油田传统修井机的改造研发。如:考虑环保和降本增效,各生产厂家都在传统石油修井机上做了些创新和升级,网电驱动的修井机便随之而诞生。
然而这种改变仅在传统的结构上作了一定程度的变化,使得修井作业变得较为方便,弥补了原有的一些缺点,但修井作业仍然是一份高强度和高作业风险的工作,其作业工艺还是传统的做法,即:吊车、带压作业设备作业完成后方可进行修井作业。
许多方面还存在着缺陷,需要设计者们继续深入研究,结合作业实践解决在实际工作中面临的问题。
1.2 自动化
油田作业领域一直有句广为流传的话:“钻井苦,作业累”,艰苦的工作环境,高强度的劳动,工人在做这份工作时都会感到身心疲惫。经济水平的提高,人们更加注重生活质量,许多人都不愿意从事这种艰辛的工作,由于作业强度太高,导致该行业一直缺少新鲜血液的融入。
尽管以后传统的修井机加装了一些自动排管系统,但还做得不够,还不能彻底地改善作业工人的工作环境,用先进的自动化设备代替人工操作,降低劳动强度,安全增效,更好地促进修井作业的自动化发展。
1.3 智能化
修井自动化工具的配套虽然能够有效解决和降低劳动强度和减员,但不能保证各个自动化工具之间以及与主机之间的协同作业及设备的安全保护。自动化能够使操作更加简便,节省人力,许多操作都可以引入操作室内由一人操作,但过渡的减员容易造成工作人员操作负担,增加错误率。
因此,司钻的操控设计要尽可能趋于人性化,确保设备在空间上智能防撞,集成控制系统中的各子系统都能够独立作业,也可集成作业,同时也便于作业人员的操作。除此之外,还需对操作室内的动作监视、预警系统和故障诊断及报警系统的维护,随时发现问题并进行处理。
以上这些都是近年来在传统重载石油修井机结构基础的创新和改造的简单总结,但这些创新和改造却不能彻底地解决工人操作所遇到的实际问题,更不能解决修井作业所面临的新工艺问题。
传统修井机作业过程,通常在起下管柱前,要先对井内进行处理,释放压力或用压井液压井,然后才能进行修井作业,一般都是在溢流下进行作业,而且需吊车配合、需待不压井作业装置对井口进行处理后方才可用传统修井机作业。此过程,起下油管或油杆,只能是边放喷边作业,操作工又累又脏、耗时低效。况且是绞车钢丝绳提升,更没有对管柱的下压力,起下作业过程易诱发井涌、井喷等事故。
相对于传统修井作业,带压作业除了能保护储层外,还能够解决修井作业当中普遍存在的问题,如:“管柱的上顶和下压、防喷和泄流”都是可控的,不会发生井喷事故。带压作业指利用特殊修井设备,在油、气、水井井口带压的情况下,直接实施起下管杆、井筒修理及增产措施的井下作业技术。通过防喷器组控制环空内压力,控制油管内部压力,通过对管柱施加外力克服井内上顶力,完成带压情况下起下管柱的作业过程。几乎所有的油、气、水井从勘探、开发到后期的维护过程都会受到不同程度的伤害。如何避免和减小对储层的伤害,提高油、气、水井的寿命和产能一直是开发技术所努力的方向。所以,带压作业技术的出现为实现真正意义上油气层的保护提供了可能。
因此,各大油田都迫切而急需一套高效作业、快速移运的起下油管/杆的自动化作业设备,减少实际操作人员,降低工人的劳动强度,提高整体作业的效率,使油田工人工作的更体面,这是我们当前设计者迫切需要解决的问题。
随着基础工业的发展,特别是信息技术和AI技术的发展,劳动环境的日益完善,操作舒适性和安全的要求,使得我们不得不重新审视和畅想我国车载修井机的发展。
2 未来车载修井作业机方案畅想
带压作业自动修井机是结合不压井技术,集成和创新地发展了传统修井技术,除了能够实现修井作业的自动起下油管(杆)柱、自动上卸扣、自动输送和排放管(杆)柱外、整机井口无人或少人化操作,达到高效、节能、安全、环保。真正上解决了目前修井作业中存在的普遍问题,也是当前油田工人所期盼的理想车载修井机。
为了方便操作,带压作业自动修井机油管(杆)柱自动输送和排放机构,井口自动上/卸扣机构不仅能够在操作台上操作,同时还设置了遥控操作,可以在井场内离线操作,真正意义上实现井口操作的无人化,把井场操作者从繁重的体力劳动中解放出来。
2.1 总体要求
修井作业时管柱始终要具有可控,防喷,防有害气体,无漏失,自动化、起下钻功能。
总体思路是以带压作业机的液缸起下钻方式的结构原理为基础,研制液压自动机械臂,油管输送架,集液器,清扣及涂脂器;配套液压钳,液压防喷器,按起下钻技术要求,进行相关的探测及自动化控制技术的研发,实现修井起下钻作业的自动化。总体结构示意见图1、图2。

图1 运输示意图

图2 井口安装示意图
2.2 主要功能和要求
(1)起下钻过程中,管柱始终处于受控状态,且防止上顶、下砸。
(2)油管内和环空应具有自动防喷功能。
(3)卸扣时具有防止液体的溅落功能。
(4)当有害气体超标时,能自动关井功能。
(5)具有自动清理油管丝扣和涂密封脂功能。
(6)管具地面输送系统具有长水平段推送钻具功能。
(7)起、下钻时,套管头不承受载荷的功能。
(8)具有无线远控和自动化操作功能。
(9)各项起下钻参数自动记录的功能。
总体结构功能示意见图3、图4。
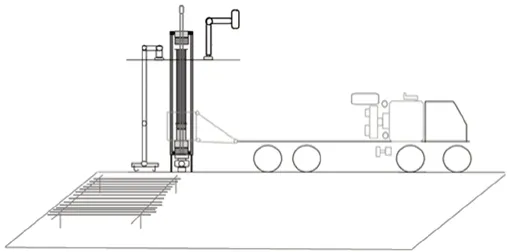
图3 抓管及起下钻功能示意图

图4 接管及起下钻示意图
2.3 技术参数(以600kN载荷技术参数为准)
最大上拉力:600kN。
额定下压力:300kN。
上提及下放最大速度:1.3m/s。
上提及下入额定速度:0.8m/s。
总重量:≤15t。
2.4 安装与使用
若对上悬挂井口作业,将井口大四通上法兰处的小法兰盘拆开,将小四通全部吊走。再将车载自动化修井机倒于井口,通过液压缸起升作业平台,调节底盘上的调节机构的X、Y方向,使作业平台对准井眼中心,插入油管短节与小法盘连接,通过液缸上提井口40~50cm,可竖直Z方向调节井眼,并将吊卡支撑在油管接箍和下法兰之间,卸去上法兰后,将防喷器对准安装于下四通上,可进行自动化起下钻作业。
若对下悬挂井口进行作业,只要用吊车将井口吊走,再将车载自动化修井机倒于井口,通过油缸起升作业平台,底盘上调节机构X、Y方向调节井眼,通过油缸可竖直Z方向调节井眼,使作业平台下的防喷器顺利地对准安装于井口上,即可进行起下钻作业。
2.5 结构组成
修井机主体结构类似不压井作业机(如图2),并增加了探测、控制功能及相应的自动化辅助功能,以满足安全起下钻,防喷溢流,自动化控制等要求。
2.5.1 修井机基架
由四个液缸支撑的作业平台的中间位置上,安装了两个起下管柱的升降液缸,液缸的上、下部安装游动和固定卡瓦及漏磁探测仪、防喷器;防喷器在固定卡瓦的下部,且能够在油缸的举升下,上下移动并可调约500mm,使其与油缸间通过活动连接方式成为一个整体;防喷器的上面安装有漏磁探测仪,用于探测油管接箍,防喷管与游动卡瓦连接;平台下部的四个液压支腿,将载荷的作用力转移至地面。
2.5.2 液压钳
液压钳安装于游动卡瓦的顶部,当上卸扣时,推出或缩回。类似上卸扣的铁钻工(可用油管动力钳改造),实现高低档转换,停转时内转子开口与开定子开口始终对口,便于液压钳推进与退出,以便实现上卸扣的自动化。
2.5.3 液压机械臂
平台的边沿处安装有液压机械臂,该机械臂实现抓取地面油管架上的油管,并将油管举升,与井口油管实现对扣。
2.5.4 升降油缸
升降行程。采用一级油缸,行程5.5m;确保每次起出半根油管,通过调节大油缸的流量,加快起下速度。
液缸功率估算:250kW。
发动机功率估计:360kW。
超载保护。安装于油缸上的压力传感器,探测液压油的压力值,当载荷超过设定值时,油缸停止加载,以起到超载保护的作用。
2.5.5 防喷管长度
防喷管长度=液缸长度-固定卡瓦高度-防喷器高度-漏磁探测仪+(集液器的高度)。
2.5.6 油管地面排管架
起钻时排管架前高后低,下钻时排管架后高前低,目得是让油管自动滚动到排管架上,并让油管实现定位。确保每次抓取时,机械手距油管接箍之间有一定的距离,便于自动上卸扣。
2.5.7 液压支腿
支腿液缸上安装有压力表和压力传感器,当支腿油压降低时,自动补偿油压,调整支腿液缸的承压能力;由于支腿液缸共用蓄能器压力,当某一支腿受力小时,会自动伸长,使其受力达到均衡;但各个支腿下面均须垫实;当倾斜度无法自动调整时,给予报警警示。
2.5.8 液压机械手臂
安装于修井机基架的平台上,作用力矩要能满足吊装作业井口反扭矩的要求。
额定力矩:5m×100kg。
具有无线远程控制功能。具有升缩,折叠,旋转,抓放,对扣功能,在井口接箍和地面油管定点位置之间,往复运动。吊装大直径工具等;抓送大直径工具到地面或到井口,并对准井口油管至接箍上,带有扶正工具和上卸扣功能。
控制要点。每个伸缩节有流量传感器,探测和控制液缸伸缩量;每个旋转部位有角度传感器,探测和控制转动角度,确保按实测角度和伸缩量,准确地对准井口油管接箍,或地面油管输送架上的定位点;爪手的开合有压力传感器探测,确保抓住和扶正油管。
并通过遥控方式能取得其运行数据和存储,按存储程序自动运行。
2.5.9 有害气体监测仪
安装于井口平台上,接箍处一个,油套环空一个;对有害气体具有探测功能,当有害气体含量出现异常时,将信号传给工控机并执行相关操作,实现紧急关井。
2.6 控制原理
接箍的探测与定位关系到液缸升降的开始和停止,采用漏磁探测仪,通过无接触方式探测油管接箍何时出井口;液缸的运动行程由管柱上两个接箍的距离确定,安装在防喷器上部的漏磁探测仪与游动卡瓦下死点的距离为一定值。
2.6.1 起钻控制计算
上提管柱,若漏磁探测仪探测到接箍时,根据接箍上升的预定高度,用该距离计算第二个接箍上升到油缸下死点位置时的所用油量,来控制接箍到达下死点,使油缸停止上行;由液压泵提供动力,由工控机计算、执行液压泵运行至预定高度,控制固定卡瓦关住,和游动卡瓦打开,并实施卸扣程序。
2.6.2 下钻控制计算
下钻时,游动卡瓦处于下死点,通过地面油管架上的红外线探测仪,探测油管长度,通过该长度计算游动卡瓦上行抱住第一个接箍所需油量,以此控制游动卡瓦上部到接箍的下部,并卡住接箍,游动卡瓦再下行至下死点,完成一根油管的下入。
2.6.3 油管损伤探测与控制
当油管有破损时,漏磁探测仪可直接检出油管有破损,可自动将该破损油管起出,通过液压机械手臂,抓放到另一地面摆放位置。
油管壁厚的探测与控制。利用液压臂探测油管的重量,利用红外线探测油管长度,当壁厚达不到要求时,即每米油管的重量也达不到要求。则必须挑选出并实测油管最小壁厚的极限值。
油管丝扣检测。清理丝扣过程中,若清丝扣被卡住转不动了,或丝扣数不够,则说明丝扣受到损伤,则可自动将该油管移送走,而不需再下入井内。
2.6.4 防喷系统控制
当井内有油管,发生井涌时,关闭半封闸板;当井内无油管,暂停作业或井涌时,关闭全封闸板。
安装有井涌传感器,当工控机接收到井喷信号后,根据井内是否有油管,指令会控制安装在防喷器液缸上的电磁阀,开关单闸板或双闸板。
2.6.5 游动及固定卡瓦
接箍高度的探测,是起下钻控制最基本的参照点,以其判断并确定行程,卡瓦开合,机械臂和铁钻工的运行时机和程度。在液压管路安装中有压力传感器,分别判断其处于打开或关闭状态。两者分别处于开/关状态,不能同时开或关,确保管柱始终处于受控状态。
2.6.6 漏磁探测仪
安装于双闸板防喷器之上,对损伤油管进行探测。若探测后油管有损伤则用机械臂将其自动移走。
判断接箍何时进出井口,通过液压油流量控制油管接箍到游动卡瓦下死点的位置,使其给工控机传输信号,由工控机判断,并输出执行信号使机械手臂和铁钻工执行自动化操作。
2.6.7 其它探测仪
探测液缸行程。第一组安装于液缸顶部,对液缸的移动距离进行探测,对下入井内油管的深度进行记录,作为修井资料并保存,配合漏磁探测仪,对接箍位置进行探测和控制。
探测井涌及井喷。第二组安装于游动卡瓦上部,让其略高于接箍位置,探测接箍出口某一高度是否有液体返出,若有液体返出,产生井涌或井喷信号,此时工控机接收该信号后,执行关井作业。
信号接收。该信号采用无线信号发射与接收。
管柱不通探测。第三组安装于集液器盘顶上,当其受到液流冲击时,工控机接收到冲击信号,结合第一组信号,判断是否启动集液器工作。
油管长度探测。安装于地面清扣器上,探测油管及短节长度,进行数据记录,该数据为游动卡瓦移动距离提供计算依据。
2.6.8 清扣和涂脂器
安装于地面油管输送架上,利用气,液或电作动力,对油管丝扣自动进行清理和涂密封脂。当探测到油管定位点上有油管时,探测仪开始探测油管的长度,清扣器开始清理油管两端丝扣;清扣完成后,在油管接箍端涂油脂。
2.6.9 地面油管输送架
固定定位。置于地面,并于基架连接定位,给地面油管和防喷旋塞定位,便于机械手臂自动抓取。
输送功能。将油管架上的油管输送到油管定位点,或将定位点上的油管输送到管架上;对输送油管的数量进行记录。
辅助功能。其上安装油管+油管旋塞,清扣器和涂脂器以及红外线探测仪。
控制要点。其上油管定位点上有受力开关,与工控机相连,当开关处于打开状态时表明该定位点没有油管,液压机械手臂不能抓油管,输送器须向该点输送油管;否则可抓油管,但不能输送油管。
2.6.10 集液器
探测与控制。安装于防喷管法兰盘上端面,当平台上的液滴探测器探到有液体泄出,下移油管封堵接箍,同时通过液缸机构推送集液器抱住油管接箍,再上提一定距离,收集泄漏液体到防喷管中返回井内;液体漏失完后,自动缩回原位,机械臂将油管抓走;当卸开下个接箍时,集液器会自动上行,让开位置。
运行方法。在起钻及下钻程序中调用集液控制运行模块。
2.7 动力系统
柴油发动机提供动力,作业过程须节能运行。调速系统要根据系统负载需求自动提高柴油机转速,提供所需动力;不能始终处于高速运转状态。
先让发动机加速到某一速度,通过开式油泵的供油量控制油液运行速度,以达到工艺要求。当负荷增大,发动机转速下降,液缸运行速度达不到要求时,柴油机自动加大油门,提高发动机转速,以满足负荷及运行速度的控制要求。
选择“60吨载荷的自动修井机”,不仅是为了减少设计的风险,更重要的是考虑应用清洁能源-网电提供动力。蓄电池供能的行驶车辆,利用率中的80%时间都是在停止当中,真正工作使用的时间只占20%,这和我们修井机作业80%都是在井场作业时间类似,其余的时间几乎是在运输搬迁过程,因此自动化修井机行驶可考虑采用独立电机轮毂驱动底盘,80%的作业过程时间充分利用作业过程的网电对蓄电池充电,以便运输搬迁时行驶之用。同时,也可通过充电桩为蓄电池充电,为车辆行驶过程提供电能。据了解蓄电池提供动力的电驱车桥已经趋于成熟(如:煤矿电驱矿车普遍使用),高能蓄电池和充电技术也已经走向了成熟。
2.8 控制模块工作程序
工控机是自动化和无线远控的大脑,起到探测,接收,处理,并发出执行信号,进行自动化及无线远控操作的作用。
2.8.1 输入及输出模块
起钻输入参数;下钻输入参数;钻磨输入参数;辅助参数。
2.8.2 自动化起钻模块
进入该模块后,游动卡瓦下行到接箍下部位置,自动卡住油管接箍后,打开固定卡瓦,上提管柱;工控机接收到下一个漏磁探测仪探测到的油管接箍信号,计算接箍到预定高度所需的油液量,当油液量达到计算量时,第二个接箍到达预定位置,液缸停业上行;关闭固定卡瓦,打开游动卡瓦;游动卡瓦下行到下死点位置,机械臂扶住油管,同时铁钻工移动至油管接箍并自动卸扣;卸扣结束后,机械臂上提10mm后,并将油管抓送到地面油管输送架定位点上,完成起出一根油管接箍。重复以上动作,自动完成起钻程序。
2.8.3 自动下钻模块
进入该模块后,关闭固定卡瓦,打开游动卡瓦,油缸降至下死点位;同时,液压机械臂抓送油管到井口接箍,并对正接箍;铁钻工抱住接箍,并自动上扣;丝扣上紧后,液压机械臂离开,继续抓送油管;铁钻工复位,同时液缸上行到第一个油管接箍的下部后,停止上行;游动卡瓦关闭,固定卡瓦打开;继续下行至下死点时,停止下行,关闭固定卡瓦,打开游动卡瓦,完成一根油管的下入。重复以上动作,自动完成下钻程序。
2.8.4 紧急关井模块
当探测发现有害气体超标或发现井涌后,自动进入关井模式。
(1)首先将已出井口的管柱下入井内,使游动卡瓦处于液缸的上死点,关闭固定卡瓦,打开游动卡瓦后,游动卡瓦上升一定的距离(≤1m);同时,机械臂放下已抓到的油管于输送架上,再在输送架上抓取旋转短节+防喷旋塞,插入到游动卡瓦中,使卡瓦卡住可转动部位;下移液缸,使防喷旋塞接头与井口接箍对扣,铁钻工抱住接箍开始上扣。实现紧急关井的功能。
(2)若往井内下入管柱时,其拉力为零时,将漏出井外的油管起出后,再执行步骤(1)。
2.8.5 子模块
抓送油管。工控机接收液压机械臂上的旋转角度,折叠角度,液缸伸缩量的信号值,与通过无线远控的测试记录数据对应,控制机械臂自动抓送油管;当液缸上行,且固定卡瓦关闭,游动卡瓦打开时,结合铁钻工卸扣,执行扶、抓,送油管到地面油管输送架;反之,从地面油管架抓、送、扶油管到井口接箍,配合铁钻工上扣。
上、卸扣。当固定卡瓦关闭,工控机按收到固定卡瓦的油压和油量信号,确认关闭,执行打开游动凡尔程序,并通过油压和油量信号确认打开,并结合液缸上行或下行的判断,再执行推动铁钻工抱住油管接箍的卸口,或上扣程序;自动上、卸扣技术已成熟,只需选型。
清扣和涂油脂。当下钻时,工控机通过检测地面油管定位架上的信号,控制清扣机靠近油管对其清扣后,对接箍内腔涂油脂,再实施抓送油管功能。当起钻时,若没有接收到地面油管定位架上的信号,则执行抓放油管到地面油管架上的功能。
防有害气体或防喷。工控机接收安装在油管接箍处的超声波或红外线信号,若判断为井涌,井喷;或接收到有害气体信号,则执行紧急关井功能。将油管接箍下到预定高度;若下不到位,则将该油管起出;关闭固定卡瓦,启动机械臂抓取油管防喷旋塞,封堵油管接箍,实现自动防喷。
2.8.6 显示与记录
(1)油管长度(下入和起出)。
油管数量:_根,长度:_m,总长:_m。
(2)负载。
每根油管重量:_kg,总重量:_t。
下入负载:_kg,对应的油管长度:_m。
起出负载对应的油管长度:_m。
钻压(负载-悬重)与油管长度关系曲线。
薄壁油管:_根,_m。
破损油管:_根,_m。
3 结语
我国石油修井机历经了全进口、半进口、半国产化和国产化几个时期,如今,结合油田实际放弃传统的结构形式(由绞车提升钢丝绳、游吊、滑轮组起、下钻作业),并结合不压紧井作业先进技术,利用当前先进的人工智能技术和大数据运算平台及先进的通信技术,设计一款先进的自动化车载修井机,响应国家对节能减排、减少消耗和保护环境的政策,使整机实现自动化或智能化,井口无人或少人化的操作,降低劳动强度,提高劳动生产效率,达到高效、节能、安全、环保的要求。真正意义上解决当前修井作业中存在的普遍问题,也是油田工人所期盼和向往的先进修井设备。