无人驾驶电动赛车线控制动策略开发
2021-06-24张苏才任建平
李 刚,张苏才,任建平,石 晶
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
1 线控制动系统
1.1 线控制动系统功能概述
无人驾驶电动赛车线控制动系统的电控单元主要作用是对赛车行驶安全进行监测。包括以下两个方面:①对赛车制动踏板位移量和制动压力进行监测,并且通过调整油缸比例阀控制赛车制动压力;②采集赛车的速度以及根据不同行驶状态控制示警灯。除电控单元之外还设计了紧急制动系统和遥控急停系统对赛车行驶安全进行监测。当赛车处于RES 停车信号、气缸储能装置故障、通讯信号故障、行车制动信号、RES 通讯异常、无人驾驶传感器供电故障以及安全回路断开等状态下都会触发紧急制动系统。当观察到赛车处于危险情况时,可以通过遥控急停系统触发紧急制动系统使赛车停车。无人驾驶线控制动系统控制单元功能图如图1所示,红灯代表赛车处于无人驾驶紧急制动情况,黄灯代表赛车处于正常行驶状态。
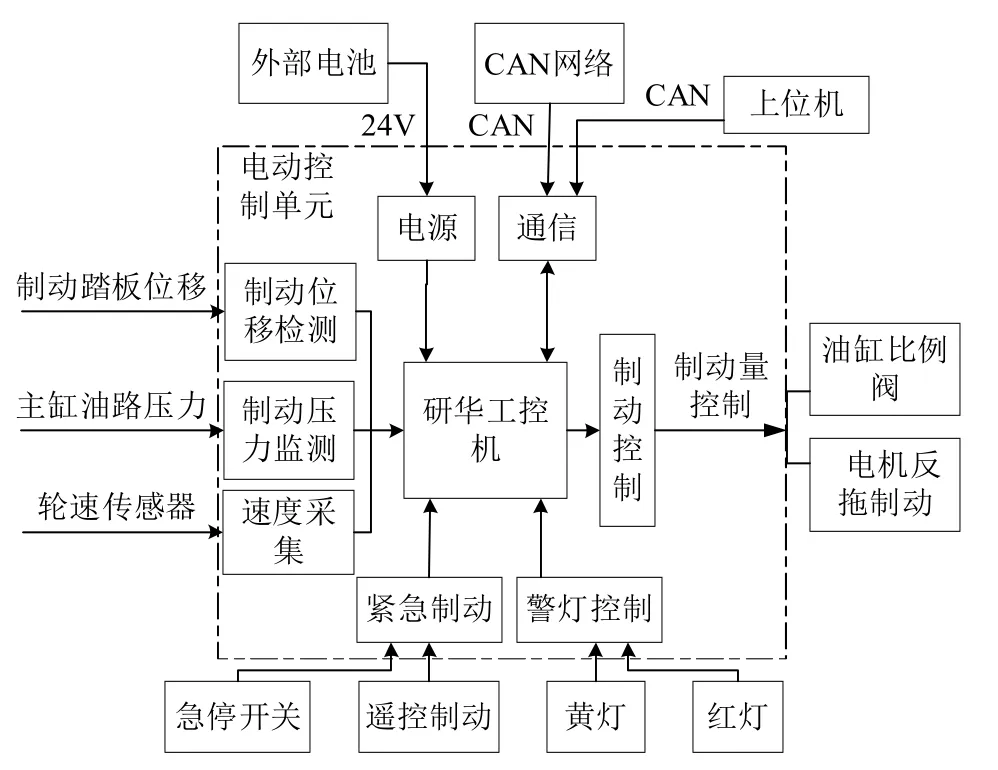
图1 无人驾驶电动赛车制动单元功能图
无人驾驶电动赛车线控制动系统制动方式包含了液压制动与驱动电机反拖制动。由图2 可知,无人驾驶电动赛车行驶速度由轮速传感器采集得到,通过实际车速与期望车速之间的对比,可以得到某一时刻速度差值,将获得的速度差值以及差值的变化率作为PID 控制器的输入。如果无人驾驶赛车实际车速大于期望车速,此时赛车需要进行减速制动,根据PID 控制器解算无人驾驶赛车制动减速度,将制动减速度转化为当前无人驾驶赛车需要的制动力,通过计算可得到此时无人驾驶赛车所需的摩擦制动力与再生制动力。根据制动力与制动踏板之间的关系得到制动踏板行程量,并根据制动踏板量与制动电机之间的几何关系得到电机此时转动的角度,整车控制器通过PWM 信号发送转角指令给制动电机,从而实现无人驾驶赛车减速制动。另一部分再生制动力由驱动电机反拖制动提供,即可以提高对能源的循环利用,同时也可以增加无人驾驶电动赛车的行驶里程。

图2 制动控制逻辑图
1.2 线控制动系统控制策略
中国大学生无人驾驶大赛规则规定,无人驾驶赛车制动系统改装必须保留有人驾驶模式,所以线控制动系统的设计基于原有的制动方式。
当赛车启动时首先判断赛车无人驾驶主开关是否打开,若打开则赛车处于无人驾驶状态,此时赛车制动系统进入准备工作状态,然后判断赛车是否处于正常行驶状态,若赛车出现RES 停车信号、气缸储能装置故障、通讯信号故障等故障时,赛车处于紧急制动状态,此时整车控制器发送信号给紧急制动系统驱动板,从而触发赛车紧急制动系统,此时气缸释放气压,带动线控制动机构旋转,当消除空行程后,赛车通过液压制动进行制动,无人驾驶电动赛车紧急制动系统的控制策略逻辑图如图3所示。

图3 无人驾驶电动赛车紧急制动系统控制策略逻辑图
当赛车正常减速行驶时,判断赛车行驶速度是否大于5 km/h 且蓄电池组SOC值是否小于80%,如若不满足,则赛车制动方式为液压制动,此时制动电机带动线控制动执行机构运动压缩制动主缸,赛车通过液压制动进行制动。若满足条件,则判断赛车制动强度是否大于0.7,若大于则判定为紧急制动状态,此时赛车处于不安全状态,再生制动力不参与制动,制动力全部由液压制动提供。若制动强度小于0.7,赛车制动方式为电液复合制动[15-16],前后轴制动力按固定值分配,再生制动力由电机反拖提供,同时产生再生制动能量,电池系统对能量进行循环利用。
无人驾驶电动赛车线控制动策略逻辑图如图4所示,无人驾驶电动赛车保留了有人驾驶模式,根据比赛项目,通过电磁阀来控制赛车处于何种行驶状态。

图4 无人驾驶电动赛车线控制动策略逻辑图
2 速度控制
2.1 PID 控制原理
(1)PID 控制器基本原理
常用者为头孢哌酮、头孢哌酮舒巴坦、头孢克肟,菌素对肠杆菌科细菌等革兰阴性杆菌具有强大抗菌作用,头孢他啶和头孢哌酮除肠杆菌科细菌外对铜绿假单胞菌亦具高度抗菌活性。
PID 控制已被大量的应用于工业工程领域,在技术方面发展的比较完善。目前常规的PID 控制系统主要由被控对象和控制器两部分组成,主要特点是可以不考虑被控对象的数学模型,只需要根据积累的经验对PID 的三个参进行在线的调试,最终能够得到比较理想的控制效果。数字PID 技术在生产过程中是一种广泛使用的控制方法,在冶金、机械、化工、机电、无人驾驶等行业中有着广泛的应用。PID 控制的基本原理为:利用比例、积分、微分分别对系统的偏差进行处理并相加得到总的控制量,将总的控制量作用于被控对象,完成PID 控制。PID控制是基于对偏差“过去”、“现在”、“将来”信息估计得一种线性控制方法。常规的PID 控制系统如图5 所示。

图5 PID 控制系统原理结构图
在图5 中,系统误差e(t)分别通过各环节处理后并相加得到控制器的输出u(t),其表达式如下:

写成传递函数形式为:

式中,e(t)=r(t)-y(t),kp是比例增益,Ti是积分时间,Td是微分时间;U(s)和E(s)分别是控制量u(t)和偏差量e(t)的拉氏变换。
由于无人驾驶赛车在实际控制中为一个离散系统,因此需要将上述的连续的PID 控制器进行离散化,然后再通过控制器对控制算法进行实现。离散的PID 控制器表达式如下:

(2)PID 控制器参数
PID 控制器主要有3 个基本参数,分别为比例系数pk、积分时间常数iT和微分时间常数dT。这3个参数对整个控制系统的动态和稳定性能有不同的影响,这3 个参数的取值直接决定PID 控制系统的控制效果。
①比例系数kp
系统的偏差信号e(t)作为控制器输入,当偏差产生后,控制器迅速产生控制作用,减小偏差。比例的作用反应了PID 控制器的快速性,kp越大,则控制系统的动作越快,振荡次数越多,调节的时间将变长。因此,kp的参数范围应该适当,过大则系统会趋于不稳定,过小则会导致系统动作过慢,调节时间变长。
②积分时间常数Ti
积分的作用主要是消除稳态误差,能够体现PID 控制的准确性,但是会使系统的稳定性下降。Ti不能过小,过小会使系统稳定性降低,当小到一定程度时,系统出现振荡现象;Ti太大,则会降低系统性能的影响力,因此需要选择适当的Ti才能有比较理想的过度特性。
③微分时间常数Td
微分作用体现了偏差信号的变化速率,同时也反映了PID 控制的稳定性,根据误差的变化率做出相应的反应,适当的微分作用能够加快系统响应,减少调节时间,改善系统的动态特性,提高系统的稳定性。通常Td取值应当适中,过大过小都会有较大超调量和较长调节时间。
2.2 速度控制实验
根据上文所述的线控制动控制策略与PID 控制原理,本文通过MATLAB/Simulink 对控制策略进行模型搭建。由于无人驾驶赛车在比赛中最小转弯半径为9 m,行驶车速较低。因此,在较低车速行驶工况下对本文提出的线控制动控制策略进行仿真验证。
当赛车处于无人驾驶状态时,赛车行驶过程中上层决策规划系统会对赛车下一个时刻的控制量进行预测,提前给出控制量的期望值。
因此,本文在特定的赛道,通过有人驾驶采集了赛车当前车速所对应的制动主缸压强,将采集的数据作为无人驾驶状态时仿真验证中的期望值,验证开发策略的可行性。
图6 为在MATLAB/Simulink环境下搭建的PID速度控制模块。
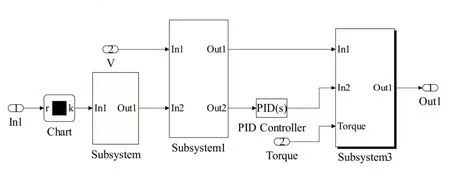
图6 PID 速度控制模块
当无人驾驶电动赛车处于减速制动状态时,赛车的加速踏板量为零,此时采集赛车实际行驶速度与实际制动压强。图7 与图8 为无人驾驶电动赛车的行驶速度与制动压强的对比图。

图7 实际压强与期望压强对比图
由图8 分析可知,无人驾驶赛车在低速行驶减速制动时其实际的制动压强与期望压强基本相近,这也说明实际制动压强可以随期望值范围内变化而变化,整体说明所设计的策略应用在低速行驶状态下效果良好,而高速测试工况复杂,危险系数高,未进行实车验证。从图8 可以看出,在行驶过程中为了跟踪上期望车速,赛车会进行加速和减速,而 变化,整体说明所设计的策略应用在低速行驶状态下效果良好,而高速测试工况复杂,危险系数高,未进行实车验证。从图8 可以看出,在行驶过程中为了跟踪上期望车速,赛车会进行加速和减速,而在加速和减速的切换过程中会出现抖动的现象,对赛车的稳定性产生影响。

图8 期望速度与实际速度对比图
本文所设计的增量PID 控制算法只能对减速进行控制,在未来的研究中还需加以完善以实现更好的控制效果。
3 结论
针对于辽宁工业大学无人驾驶电动赛车实际开发需求,本文提出了基于增量式PID 无人驾驶电动赛车线控制动系统控制策略。通过采用增量式PID 算法控制赛车制动压力,保证赛车在行驶安全的前提下按照预设路径稳定行驶。在无人驾驶电动赛车实际应用中,本文所设计的线控制动策略及增量PID 算法效果良好,有效地提高了无人驾驶电动赛车制动控制精度。
