船舶用自动风力发电系统的建模与仿真
2021-06-20王跃飞张圆圆何永玲谢积锦
王跃飞,张圆圆,何永玲,谢积锦
(北部湾大学机械与船舶海洋工程学院,广西钦州535011)
0 引言
面对日益严峻的能源及环境污染问题,世界各国均在进行能源转型布局,在全球新增发电装机的设备中,新能源的装机数量在逐年增加。法国、德国、意大利和英国将平稳有序地退出火电的电力供应。日本也提出将全国电能消耗的20%由新能源来供给。中国的新能源产业也已经得到良好的发展,据统计,截至2017年初累计风力装机总容量达到16 873万kW,累计风力发电量为2 113.2亿kW·h[1-2]。
绿色新能源船舶成为未来船舶发展的主要方向。海上的风力资源丰富,因此利用风能发电作为大型远洋船舶上的辅助供电能缓解一部分石化燃料的消耗,同时也能减少船舶柴油机发电对海洋造成的污染。2009年海上环境保护委员会(IMO)第59届会议提出了新的船能效设计指数,要求到2024年碳类的排放量减少10%。所以,发展绿色航运,综合利用新能源,加强风能在船舶上的应用,对我国船舶的绿色发展具有十分重要的意义。
当前,海运已成为全球运输的主要方式,其发展离不开船舶工业的进步,船舶中的电源装置、配电装置、电力网和负载组成的船舶电力系统是当下船舶系统的必备设备。在这样的现状下,船舶电站的设计方案在投入使用前就需要一系列的评估,而计算机仿真模拟就可以很好地解决船舶中电压系统研究时所面临的实际风险,是一种安全可靠的分析方法。因此,笔者以陆地电网为参考,考虑船舶上风能环境与电能利用的实际情况,用计算机仿真软件设计了自动风力发电系统的模型,探讨船舶电力系统中风力发电是否能够稳定输出的情况。
吕建等提出太阳能和风能混合利用,将太阳能电池板和风力发电机板简单地连接在一起,使其能够同时工作并能供电[3]。在此基础上由科罗拉多州大学、美国国家可再生新能源的实验室研发的Hybrid2模拟软件,实现了风光发电装置的模拟[4-5]。这些研究实现了从实验与仿真层面上的风光新能源初步的合并使用。邱赟等通过建立综合评价指标的方法,对船舶微电网接入方式进行研究,提出包含应急启动功能的船舶微电网初步解决方案[6]。段树华利用电池船上风机的参数,在MATLAB软件上仿真可行后,进行船上电池辅助负载供电测试实验,验证风机发电可用[7]。林治国等建立了风力发电机模型,并通过实验得出,风力电机的转速越快其输出的电压越高的结论,但其研究未涉及风机发电与船舶电网系统的并行运行[8]。马川等依据风能与光能发电的数学模型,优化配置两者运行的参数,为船舶光伏与风能的搭建设计减少成本[9]。
分析国内外高校与研究机构针对新能源混合利用系统的研究发现,优化配置及计算机仿真模拟的研究已经全面展开。本课题组就海上风力发电的特点建立风力发电机组模型,结合船舶在运行时的孤岛特性,利用仿真软件进一步探究风力发电系统与船上电网并行运行的可行性。
1 船舶风电系统
1.1 船舶电力系统的运行特点
船舶在海上航行时就像一座孤岛,自身的各个系统都要自成体系,而电力系统需要有自行专用发电设备,在技术方面有以下基本要求:
(1)三相交流电源应具有结构简单、稳定、经济的特点,船舶系统可以使用三相交流电源,通过晶闸管或者其他变频装置直接为负载供电;
(2)变频装置在低速运行时需要的功率输入较大,在船舶电力系统中,对于无功功率问题,通常要求功率因数控制在0.64~0.70,交流变频驱动时为0.80;
(3)稳定性要求较高,需要电压和频率都足够稳定;
(4)动态响应快,电压、频率等调节系统的响应要迅速。
船舶的电力系统工作在大海上,相比于陆地来说,天气变化莫测,环境更加严峻。恶劣的环境对电力设备的工作寿命和工作稳定性都是严重的威胁。船舶电力系统同样要适应恶劣的海洋环境造成的影响,比如腐蚀、潮湿、变形等,这些因素都会引起发电机动力不足及提供的电能不稳定等问题。当船舶在航行中出现大幅度的摆动或者航行环境不稳定的时候,电力系统会受到碰撞或者振动,也会导致设备的接触不良、误动作甚至会损坏设备。因此,保证船舶用电的稳定性和可靠性显得尤为重要。
1.2 风能特点分析
风速的不稳定可使风力发电机的输出波动不稳定,不易于被负载直接利用。在风速很弱或者无风的时候,不足以推动风机转动,无法产生电能,所以需要加入蓄电池,才能使它成为系统的第二个电源。由于风机产生的电能是不稳定的,无法直接使用和存储,只有通过整流器整流之后才能将电能转化为化学能,并储存在蓄电池中。由于蓄电池产生的是直流电,而船舶自身电网和大部分用电装置都是交流电,所以需要通过逆变器将蓄电池输出的直流电转换为交流电再接入船舶电网。整个过程分别经历了两大转换即:“电能→化学能→电能”以及“交流→直流→交流”的过程。现阶段离网型风力发电系统的基本结构如图1所示。
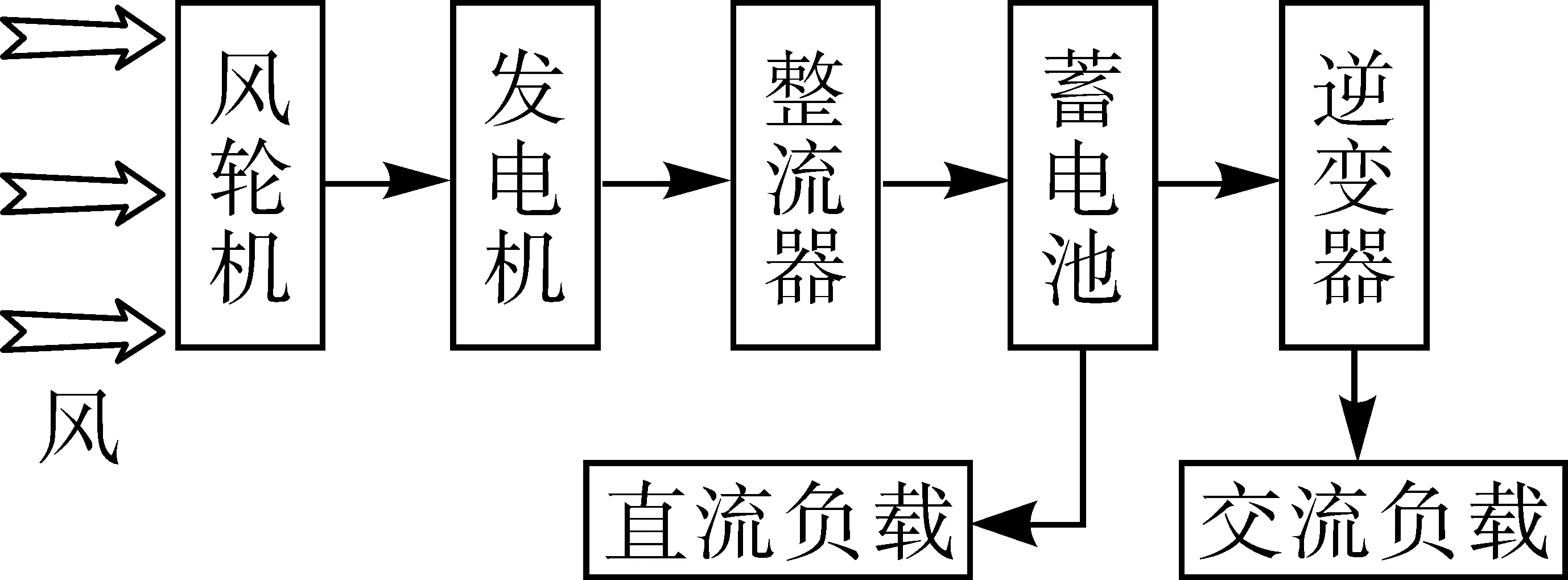
图1 离网型风力发电系统示意图
船舶上的风机运行及供电,在不同风速作用下一般会出现4种能量传输模式:第一种情况,当风速到达风机额定功率所需要的风速时,风机启动发电,经过整流、直流升压、逆变电路直接向船舶系统输送电力;第二种情况,当推动叶片的风速较大时,产生的电能在供给船舶系统的同时还要对风机进行刹车保护,防止叶片转动过快导致风机损坏,同时利用蓄电池将多余的电能进行存储,当蓄电池也进入饱和状态时则将多余的能量通过泄能装置进行释放;第三种情况,当风速达到推动叶片使得风机发电的速度,但是还不到额定风速时,则通过蓄电池放电进行补偿向船舶系统供电;第四种情况,当风速不足以推动风机叶片转动时,则蓄电池直接向船舶供给电能。具体如图2所示。

图2 4种能量传输模式
1.3 风场的建模
由于风的随机性和间歇性,需要分析风电装置在接入船舶电力系统时所产生的影响,通过Simulink对风进行模拟建立风场模型。通常风速vW的模型由基本风vWB、阵风vWG、随机风vWR、渐变风vWN4个模拟分量组成,即
vW=vWB+vWG+vWR+vWN。
(1)
1.3.1 基本风速模型
基本风反映了风机运行所受平均风速的变化,它存在于风机正常运行的整个过程,对风机向系统输送额定功率的大小起着重要的作用。对于独立运行的风机,基本风速一般为常数,本文选取基本风速为13。
1.3.2 阵风风速模型
在一段时间内忽大忽小的风速被称为阵风,它在该段时间内呈现余弦特性,在气象中阵风通常又指瞬间极大风速。阵风风速模型的建立有利于分析风力发电系统对电网电压波动产生的影响,考核系统在较大风的作用下的电压波动特性。阵风符合公式:
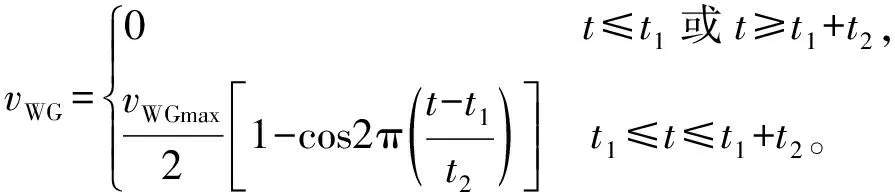
(2)
式中,vWGmax为阵风峰值;t为时间变量;t1为阵风开始时间;t2为阵风周期。模型中选取t1为0;t2为60。
1.3.3 随机风风速模型
随机风也称为噪声风,描述了风的随机变化,随机风存在于风机运行的整个过程中,用公式(3)来表达:
(3)
式中:vr为随机风的波动幅值;ran(1,-1)为1到-1之间的随机数;其中,ωx是第x个分量的角频率;φx为0~2π之间的均匀分布的随机变量。直接使用输入随机信号代替各项随机变量。
1.3.4 渐变风风速模型
渐变风在3个时间段内保持线性变化,用式(4)来表达:

(4)
式中,vWNmax为渐变风最大值;ta、tb、tg分别为阵风的开始加强的时间和最大值持续时间以及加强结束的时间,仿真中tb、tg均取值为30。
1.3.5 自动风风速模型
得到的4个风速模型组成模拟分量,根据式(1)的加法运算建立综合自动风速仿真模型图如图3所示,示波器输出的风速仿真波形如图4所示。

图3 自动风风速Simulink模型

图4 自动风风速仿真波形
由图4可以看出,自动风风速仿真波形是由上下波动较大的综合波形连接而成,大体上呈现先变大再变小的特征,与实际海风的特性相符。
2 船舶风力发电系统模型建立与仿真分析
2.1 风力发电工作原理
风力发电是通过风的作用力将风机的叶片推动,叶片通过增速后带动风机内部电机工作,是风能转化为机械能再转换为电能的过程。根据贝茨理论,风力机的功率受到空气密度、风速、受风面积影响[1,9],即:
(5)
(6)
式中,ρ是空气密度,kg/m3;v是风速,m/s;A为风机捕获风能面积;R为风轮半径,m;ω为风力机机械角速度[9],rad/s;Cp为风力机输出功率系数(一般Cp为1/3~2/5,最大可达16/27),它是桨叶尖速度与风速之比λ和桨叶节距角α的函数,当叶距角的值恒定时,风机输出功率系数Cp只由叶尖速度与风速之比决定。
把每个风速所对应的最大功率点连接在一起,就形成了最佳功率曲线,风机最佳功率跟转速的关系如下:
Pmax=kn3,
(7)
(8)
在图5中,v1、v2、v3为不同的风速,且v1>v2>v3;n为风机的转速,其中n1、n2、n3为不同的转速点和v1、v2、v3的交点,为最大功率点。将每个最大功率输出点连线得到了Popt曲线,也称为最佳功率曲线。由图5可以看出,要使功率保持在最佳功率曲线上,就得在风速改变时及时地改变发电机的转速。

图5 不同风速下功率曲线及最佳功率曲线图
风机只有以额定功率输出,才能保证其所接入的电网能更好地利用风能。变速恒频技术能确保风机时刻输出额定功率。在低风速时,调节桨距角定浆距运行,来实现风能的最大捕获,再通过电路反馈来控制风机的输出功率达到额定输出值;在高风速时,通过改变浆距,控制桨距角实现恒定功率输出。
2.2 风力发电系统的Simulink建模
设计的小型风力发电系统[10-11]主要由三相电源、2个三相变压器(220 kV/35 kV、47 MVA)、(25 kV/575 V、12 MVA)、三相π线路(100 kM)、三相电压电流测量原件(575 V)以及风力涡轮感应发电机等组成,如图6所示。将图3所示自动风速模型y保存在图6中的工作区内,将风速模型输入风力涡轮感应发电机模块,风力电机开始运行,输出结果的信号发送到Goto模块,由Goto模块转到From模块再到示波器输出。

图6 小型风力发电系统
为了验证所建风力发电模块中的故障保护作用,以保证系统运行中的电压电流不会出现大的波动,甚至短路,在原发电系统的基础上加入三相故障源,模拟故障出现时的情形(如图7)。

图7 故障仿真模型
2.3 建模结果分析
在风速为自动风的情况下,仿真波形输出如图8所示。工作区提取时间选取0 s可以近似为有风时风机开始工作,仿真时间取值为30 s。由图8可知,在输出电压误差较小时,无功功率参与调压,因此这时Q基本为0。风力发电机转动就会产生相对应的有功功率。由图8可以看出,发电机的转速波形与有功曲线基本一致。由于变桨系统的存在,需要输出部分电压参与变桨,故而电压波形和无用功波形相似。整体上,在小波动的自动风速时,在误差允许的情况下,输出功率系数因数基本都在0.98以上,即相对稳定输出。
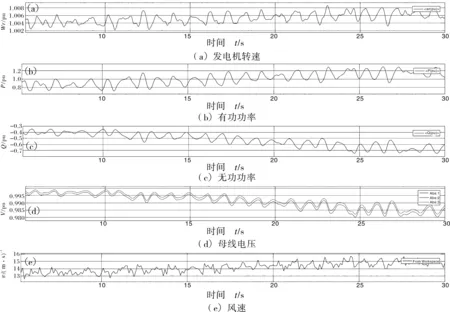
图8 风速波动时风电系统的输出特性
考虑风速恒定时线路上的三相电源短路,对风机发电系统自身的故障处理仿真时间选取0.5 s,风速波形y选取时间为1,理解为系统运行一段时间才出现故障。由故障输出波形图9所示,可以发现以下情况:风速恒定13 m/s时,在故障模拟加入后,风机输出波形出现明显变化,由1直接变为0,有功功率与无功功率这时也输出为零,进行保护调整时间达0.1 s,之后,经由小的波动,逐步恢复正常。

图9 三相短路故障时风机的输出波形
从以上仿真效果可以看出,风力发电系统分别在自动风与恒定风风速发生故障时输出相对稳定的电流电压,可以达到接入船舶电网使用的标准,从而验证本文搭建模型的有效性。但是,考虑到船舶航运工况[12]有进出港工况、停泊工况、装卸作业工况和航行工况,在不同工况下,船舶用电负荷差异较大,因此,为了更好地发挥风电的效能,蓄电池作为主要的调峰储能设备必不可少。今后可考虑在仿真时加入作为储能装置的蓄电池模块,进一步探究船舶微电网孤岛运行的情况。
3 结语
面对航运绿色可持续发展的现状,如何利用海上丰富的风能资源是一个重要课题。本课题组针对船舶上的自动风力发电系统进行了模拟探究,通过仿真验证发现,风机发电的有功曲线与综合风速变化趋势基本一致,并网电压输出基本稳定,可见课题组建立的模型是有效的。这一研究结果可为后续船舶微电网中风电并网的控制策略调整提供仿真平台,对海上航行的船舶采用风能作为电力推进能源的开发新途径也具有借鉴意义。
