偏航保护策略对MW级风力发电机组载荷影响
2021-06-15杨伟新刘晓辉李成晨
杨伟新,宋 鹏,陈 雷,刘晓辉,李成晨
(1.华北电力科学研究院有限责任公司,北京 100004) (2.鲁能新能源(集团)有限公司河北分公司,河北 张家口 075000) (3.许昌许继风电科技有限公司,河南 许昌 461000)
偏航系统是风电机组的关键系统,在整个风电机组结构和控制系统中起着相当重要的作用[1],偏航电机在伺服系统驱动下使风轮轴向始终对风,保持机组获得最大迎风面从而提高机组发电效率[2]。
目前国内外很多学者采用不同方法对偏航系统进行分析计算,如Malllawi[3]对风力发电机组风轮、塔架在偏航动作过程中的载荷进行优化,有效降低了因偏航运动导致的左右振动;纪斌等[4]建立了柔性多体塔架-叶片耦合结构动力学模型,获得了诱导因子时程曲线和气动相应均值;徐佳妮等[5]提出基于最佳叶尖速比的功率趋势分析方法,确定了偏航零点偏移角。
本文采用风电载荷计算常用的成熟软件Bladed模拟不同机组状态下偏航角度偏差对机组载荷的影响,从而获得机组不同状态下极限载荷位置,根据仿真和理论分析结果制定合理的偏航保护策略,有效降低机组的极限载荷,对风电机组平稳运行有一定现实意义。
1 偏航角度偏差对机组载荷的影响
1.1 偏航角度偏差Bladed仿真计算
本文以某公司2 MW风力发电机组为研究对象,机组的基本参数见表1,采用业内具有极高权威性和被广泛应用的Bladed软件开展仿真试验研究。
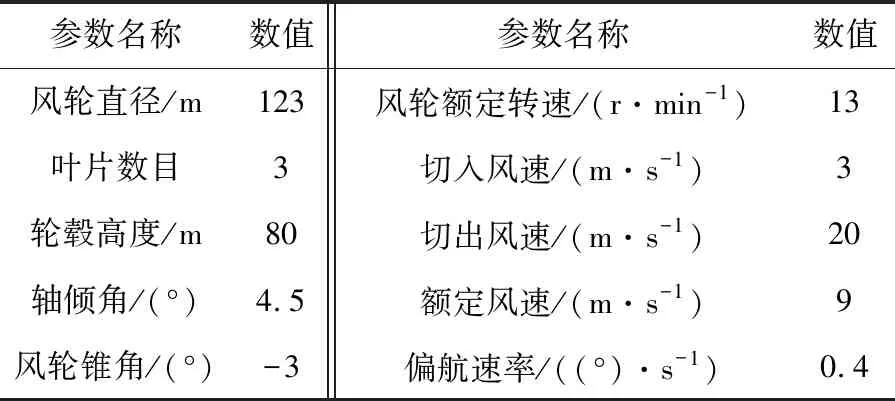
表1 某风机的基本参数
仿真试验研究偏航角度偏差对机组运行和停机两种状态的影响,以确定不同偏航角度偏差对机组载荷的影响。
试验1:风机状态为运行发电状态,分别采用GL2010认证指南中规定的极端风向变化风模型(ECD)和湍流风模型(NTM)叠加持续偏航,模拟机组载荷和振动随偏航角度偏差的变化。ECD模型风速和风向变化如图1所示,NTM模型风速变化如图2(a)所示,持续偏航偏差如图2(b)所示。仿真试验组合方案为:ECD风模型的初始风速分别为7,9,11,15 m/s,NTM风模型的平均风速为12 m/s,湍流风种子数量为10个,分别以最大正向偏航速度0.4 (°)/s从0°正向持续偏航至330°,以最大负向偏航速度-0.4 (°)/s负向持续偏航至-330°,如图2(b)所示,以10个湍流风种子下载荷均值作为统计代表值。
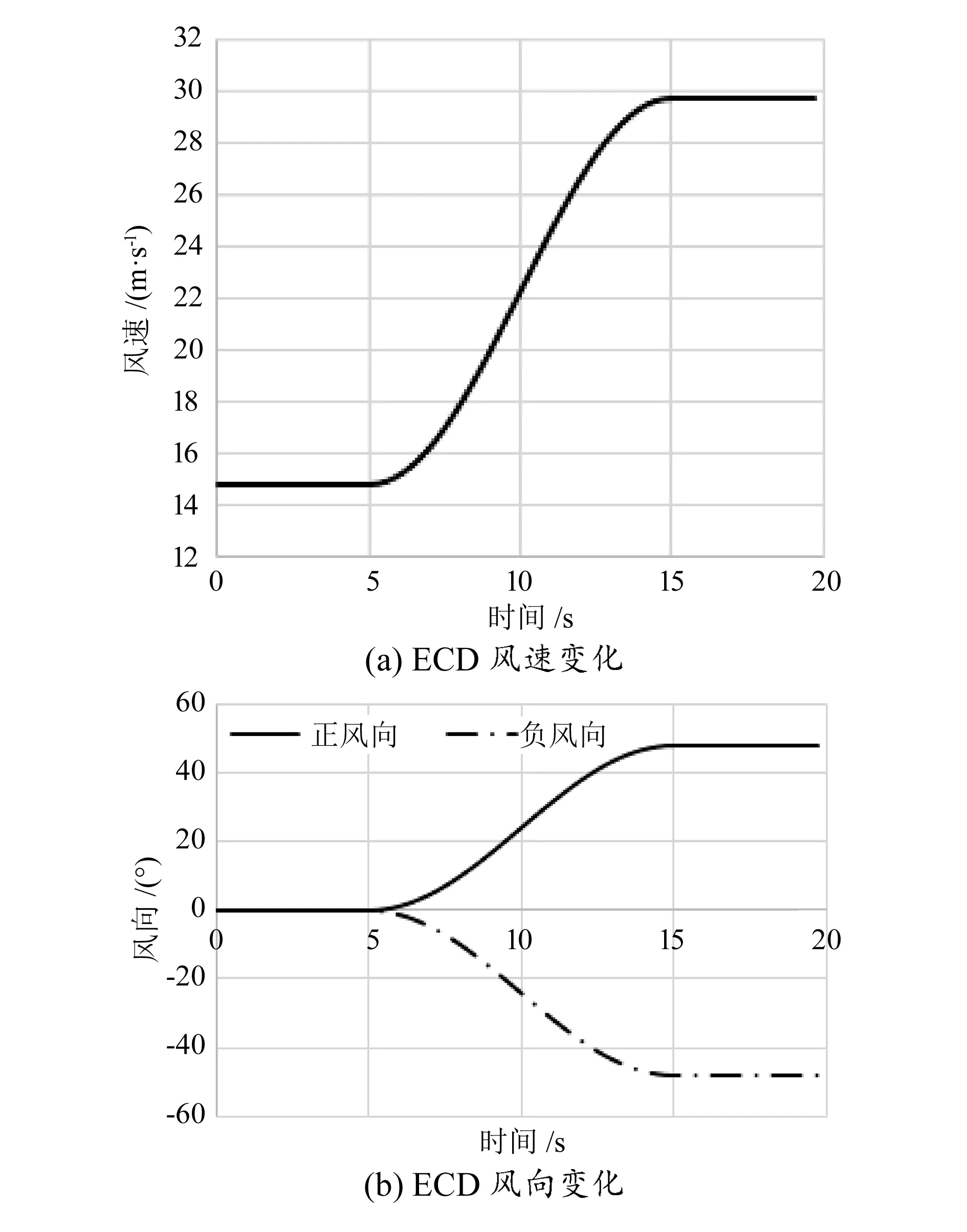
图1 ECD风模型风速风向示意
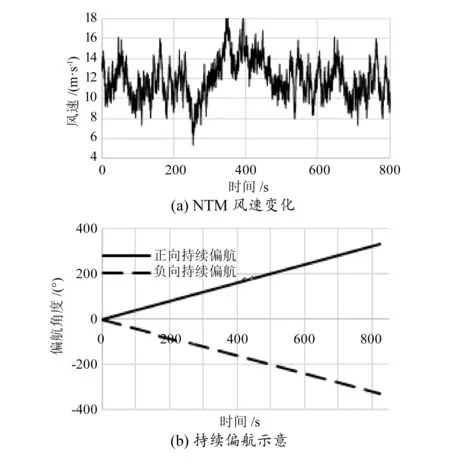
图2 NTM风模型风速变化及机组持续偏航示意
试验2:风机状态分别为投入风轮锁停机和未投风轮锁驻机状态,采用一年一遇极大湍流风模型(EWM)模拟。仿真试验方案为:偏航角度偏差为0°,30°,…,330°共计12个位置,10 min平均风速为30 m/s,风切变系数为0.11,纵向湍流强度为11%。仿真过程中保持机舱位置不变,以初始风向角作为偏航角度偏差。
1.2 偏航角度偏差对机组载荷影响分析
因相对位置关系,在Bladed仿真软件中定义正风向与负的偏航角度偏差相对应,负风向与正的偏航角度偏差相对应,如图3所示。试验1中发电状态+ECD风模型仿真结果如图4~7所示,其中风向变化过程中桨距角变化如图4所示,叶根y方向弯矩MBy的变化如图5所示,偏航轴承y方向的弯矩MYy的变化如图6所示。结合图3和图5可知,同一风速下随偏航角度偏差增加,叶根弯矩有所降低,负向偏航角度偏差情况下降低较明显;结合图3和图6可知,偏航角度偏差对偏航轴承弯矩影响比较大,偏航轴承弯矩随负偏航角度的增加而增加,随正偏航误差的增加而反向增加,在40°~90°偏航角度间出现极限载荷,仿真中7,9,11,15 m/s风速出现偏航轴承极限载荷对应的偏航角度偏差分别在100°、80°、60°、40°附近,随风速的增加出现偏航轴承极限载荷对应的偏航角度偏差值有所降低。
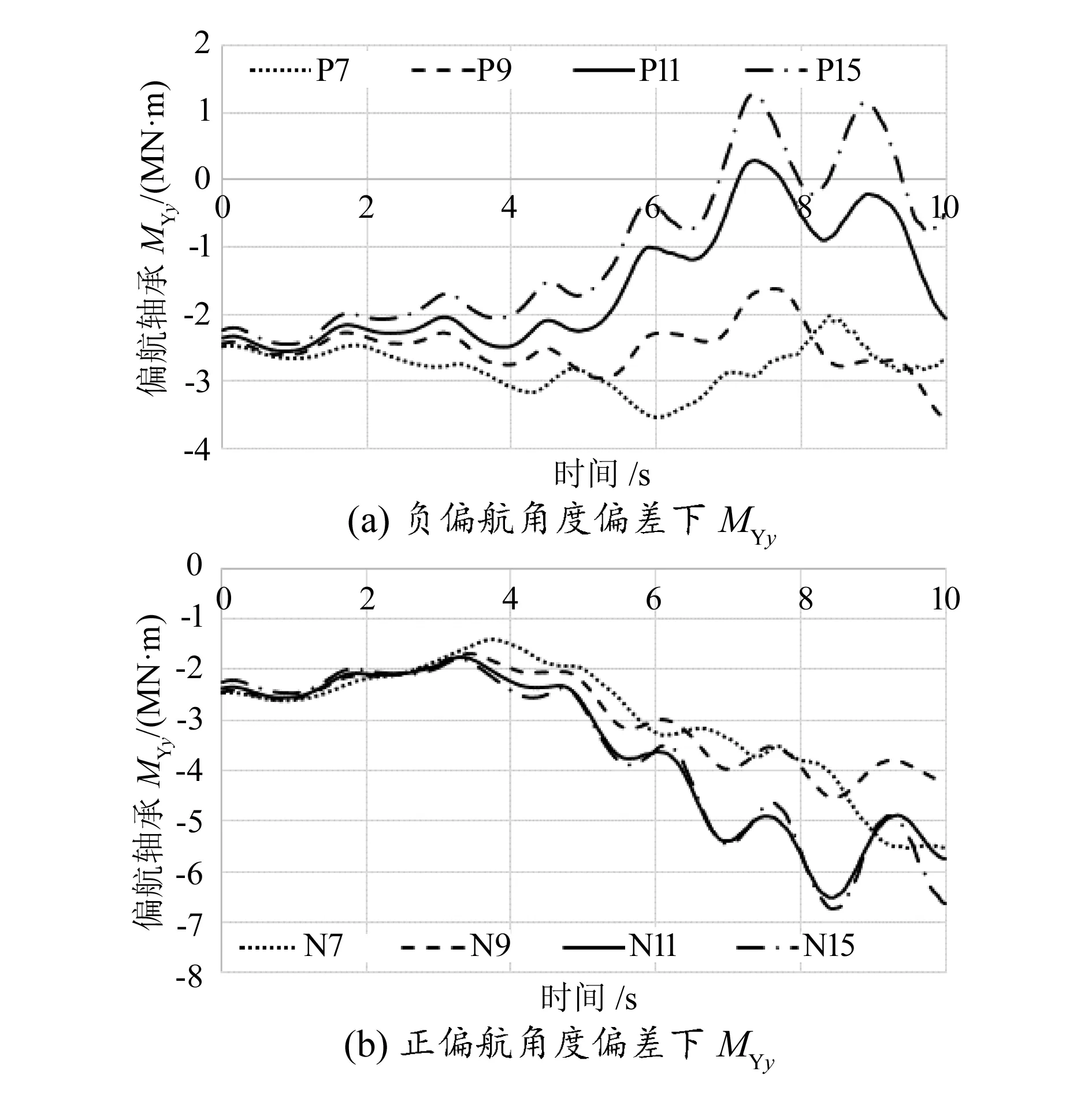
图6 偏航轴承y方向弯矩MYy时间序列
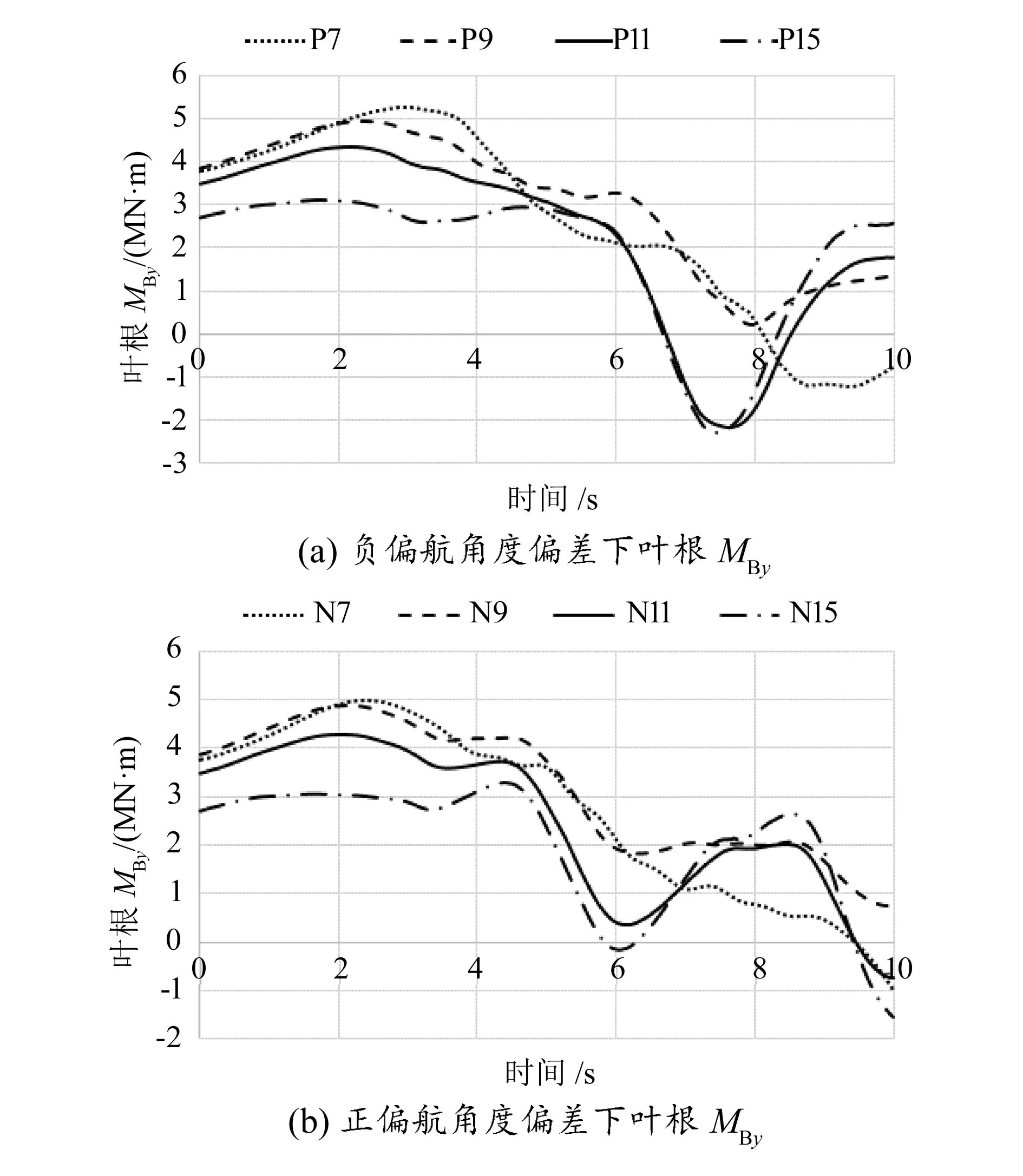
图5 叶根y方向弯矩MBy时间序列
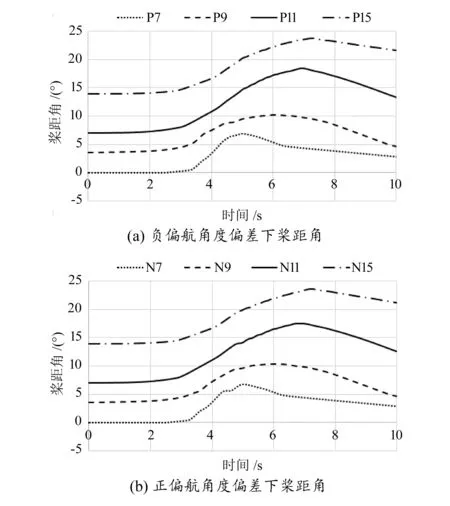
图4 桨距角时间序列
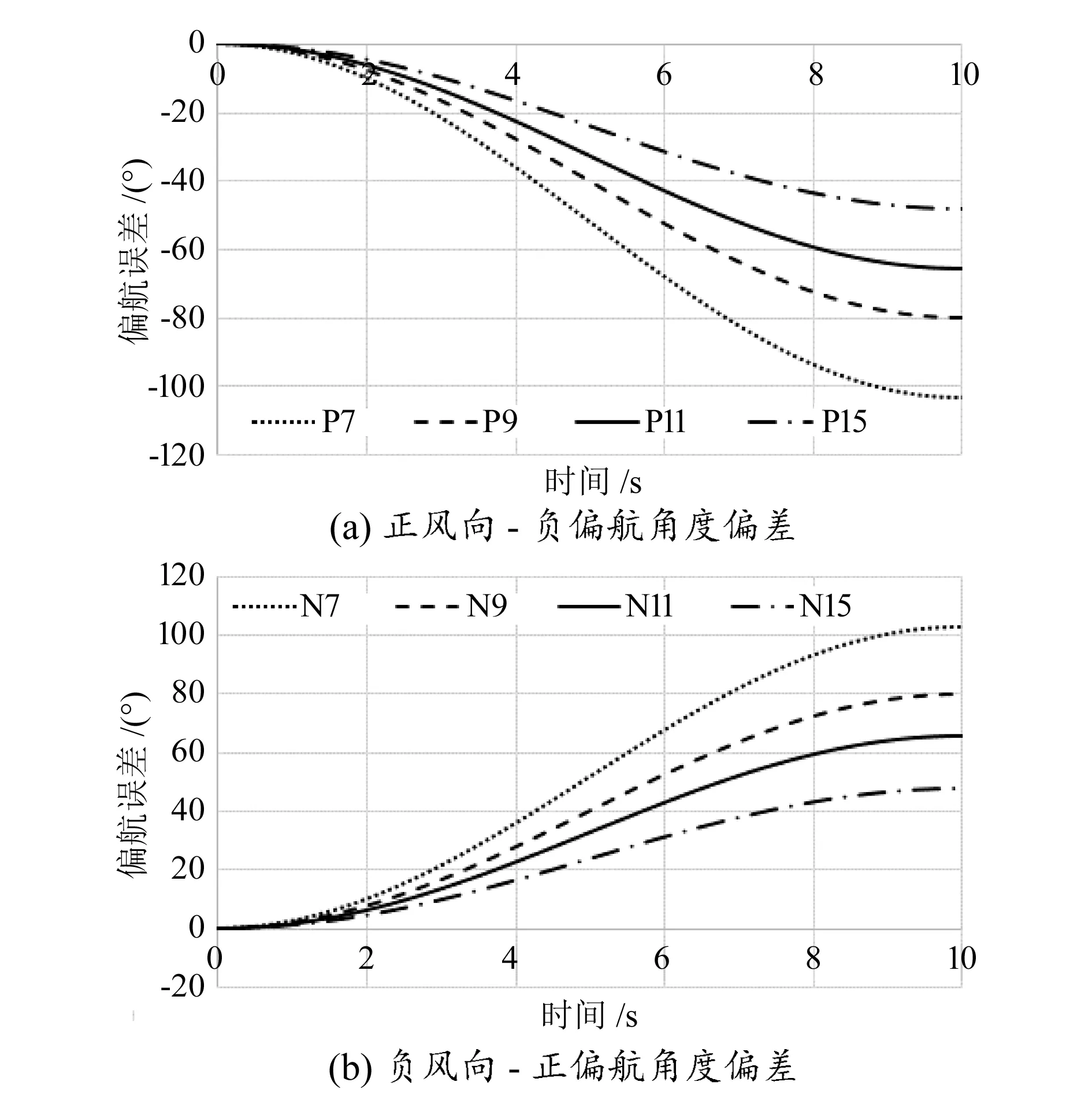
图3 偏航角度偏差时间序列
试验1中发电状态+NTM风模型仿真结果如7所示,图中P代表正风向,N代表负风向。由图可知,叶根y方向弯矩MBy随偏航角度偏差的增加而降低,在60°和300°附近出现极限载荷,偏航轴承y方向弯矩MYy随偏航角度偏差的变化呈周期性变化,在140°~220°范围内出现极限载荷。
试验2中机组风轮锁锁定或者不锁定状态+EWM风模型仿真结果如图8所示,图中比值为当前偏航角度偏差下各部件载荷与各偏航角度偏差下载荷均值的比值。由图可知,风轮锁定状态下叶根和偏航轴承载荷高于未锁定状态,在偏航角度偏差为40°和300°附近出现极限载荷,在150°~250°之间载荷较小,因此当极限风速经过时可以将机舱偏离主风向150°~250°,有利于降低机组载荷。
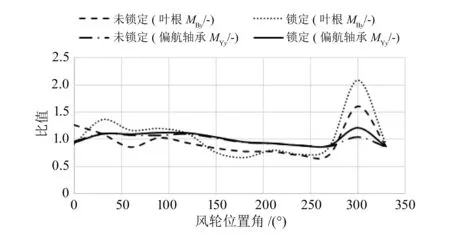
图8 EWM+停机状态下机组载荷时序
试验2中机组风轮锁锁定或者不锁定状态+NWP风模型仿真结果如图9所示, NWP风模型载荷仿真结论与EWM风模型下仿真趋势相近。
图9 NWP+停机状态下机组载荷时序
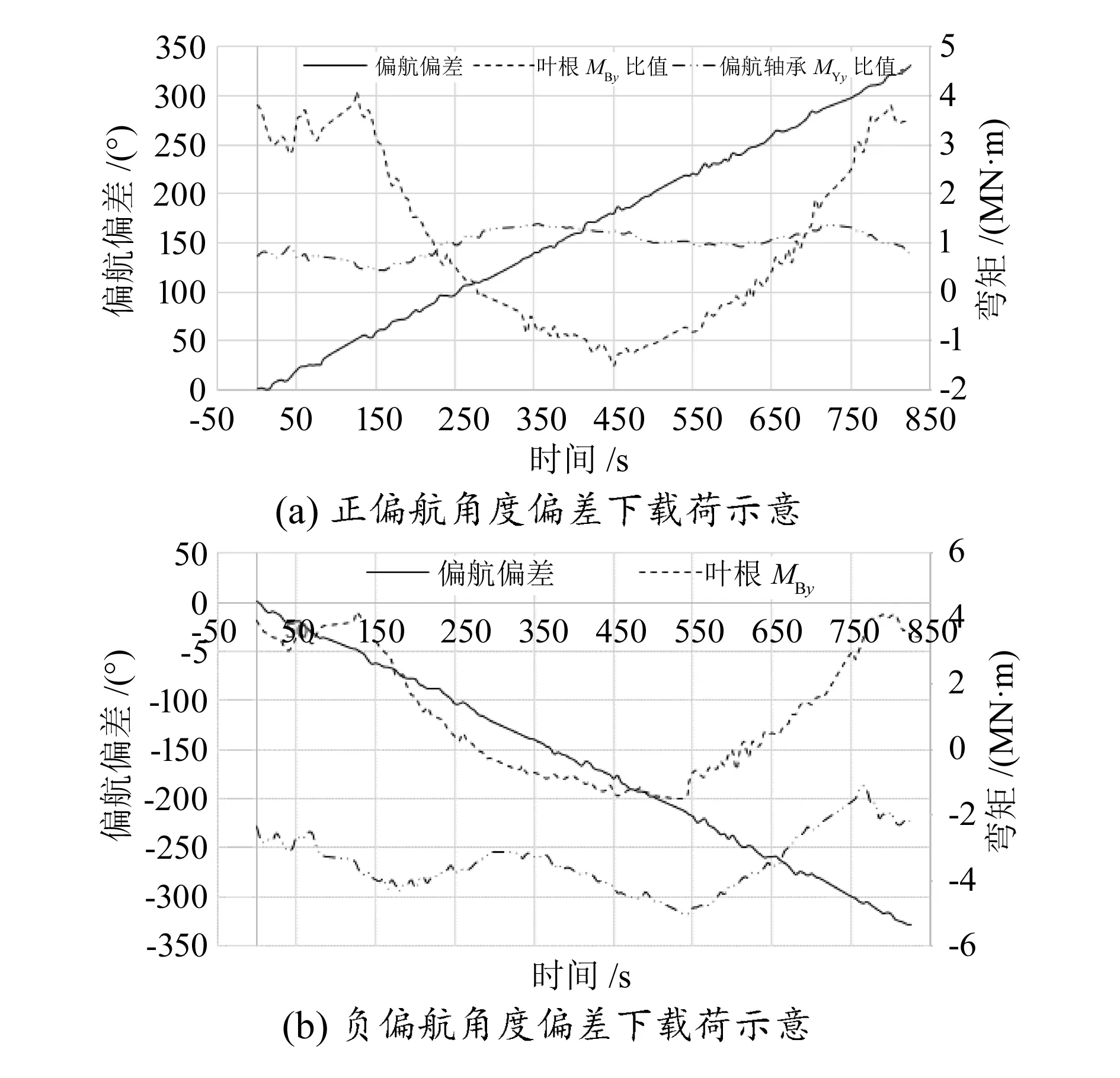
图7 NTM 风模型下持续偏航角度偏差下 叶根和偏航轴承弯矩时序
2 偏航保护策略下机组载荷情况
风电机组的偏航系统决定机组的对风情况,较
大的偏航误差对机组发电量影响较大[6],而过于严格的偏航保护限值会导致偏航系统频繁动作,机组频繁启停机而影响机组追风。综合考虑机组发电状态偏航误差对载荷的影响及现场风向变化情况,制定两种偏航保护策略:策略1,设定短期(30 s)偏航保护限值为30°和瞬时(3 s)偏航保护限值为45°,当30 s内偏航角度偏差均值达到30°或3 s内偏航角度偏差均值达到45°时,机组启用偏航保护策略按照既定停机策略停机,以避免机组出现大的偏航角度偏差引起极限载荷;策略2,与策略1一样设置短期(30 s)和瞬时(3 s)的偏航保护限值,考虑到风速越小风向变化越大,设置偏航保护限值随风速增加而降低,即风速分别为3 m/s、10 m/s和30 m/s时对应的短期偏航限值依次为50°、40°和30°,对应的瞬时偏航限值依次为70°、60°和50°,当偏航角度偏差达到设定要求时机组启用偏航保护策略,按照既定停机策略停机。
在NTM风模型下分别对策略1和策略2下机组载荷情况进行仿真,并与无保护策略进行对比,其中叶根、轮毂中心和偏航轴承载荷对比结果分别如图10~12所示。由图可知,与无保护策略相比,启用偏航保护策略1后机组叶根MB、轮毂中心Myz和偏航轴承MY的极限载荷分别降低约16.3%、32.2%、22.0%,启用偏航保护策略2后分别降低约16.0%、32.2%、22.0%。由此可见,启用偏航保护策略有效降低了偏航偏差引起的极端载荷。
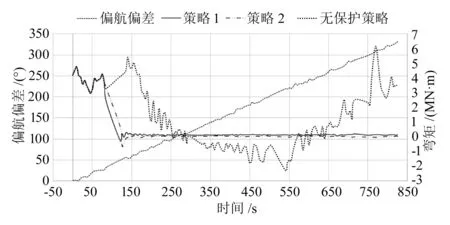
图10 叶根弯矩MB对比情况
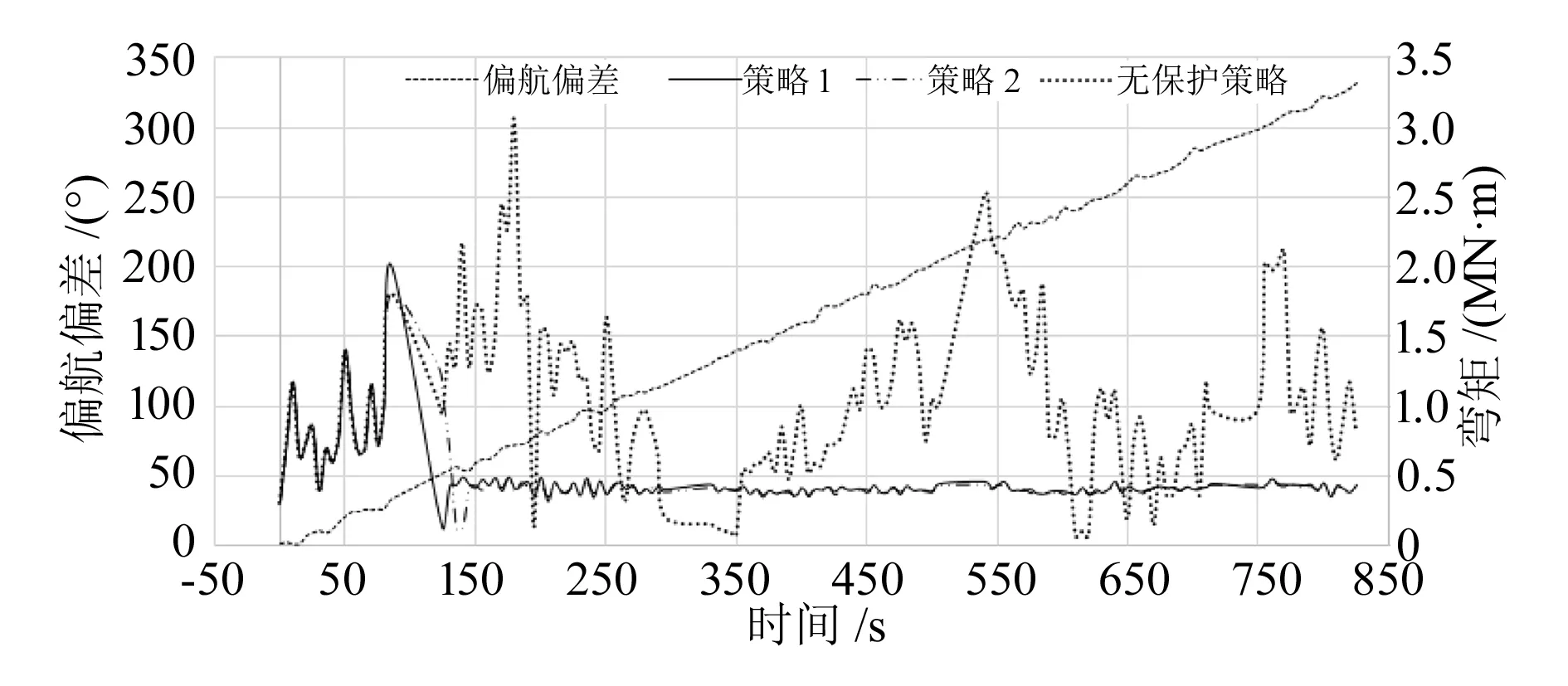
图11 轮毂弯矩Myz对比情况
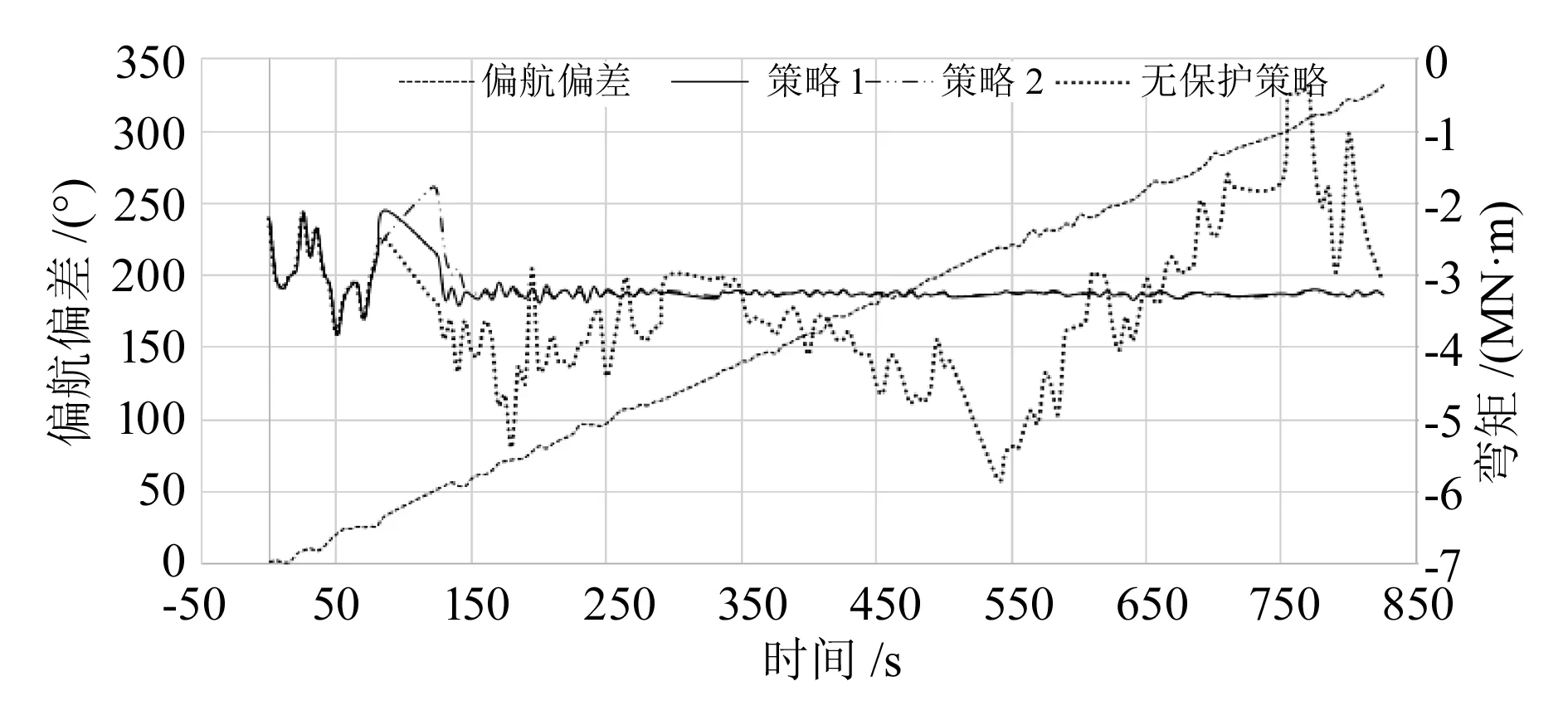
图12 偏航轴承MY对比情况
3 偏航保护过程理论分析
偏航保护策略验算采用与实际更接近的NTM风模型,理论分析中采用ECD风模型可以充分排除风速和风向不确定性对载荷的影响,图13为在偏航保护策略开启前提下叶根MB和叶片桨距角的时间历程,A点为ECD风模型阵风开始时刻,C点为阵风结束时刻,B点为偏航保护策略开始停机时刻,D点为停机过程中任一时刻。
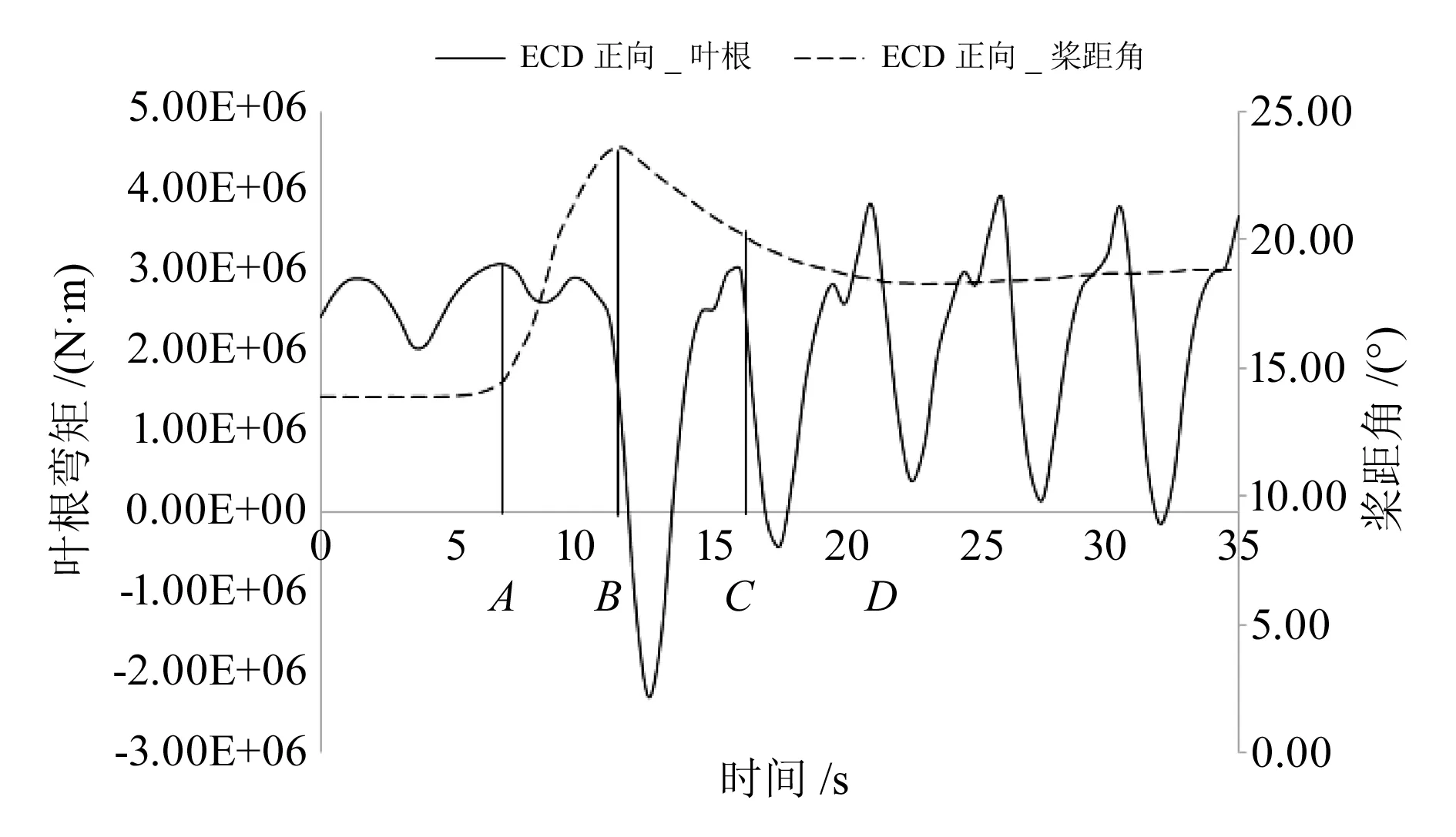
图13 叶根MB和桨距角时间历程
从图13中可以看出,机组在触发偏航保护策略停机过程中叶片弯矩明显下降且出现正、负向波动,该波动对机组较为不利,会引起机组净空降低、塔架推力疲劳增加等,需要对该载荷情况进行深入分析,以降低波动幅值。

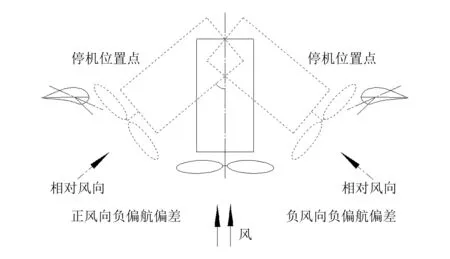
图14 偏航过程示意图
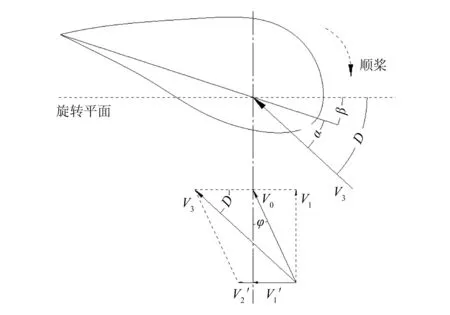
图15 负偏航角度偏差停机过程叶素气流示意图
由速度三角合成方法可知:
(1)
由三角函数关系确定入流角D=α+β, 因此入流角D为:
(2)
式中:ω为风轮转速;R为叶素位置处风轮半径;α为叶素攻角;β为桨距角;φ为偏航角度偏差。
停机过程中随着桨距角β的增加,导致叶素攻角α进一步减小,直至到0°或者负角度。叶素升力系数Cl、阻力系数Cd、扭力系数Cm随叶素攻角变化情况如图16所示,当攻角为负角度时,叶素处正、负压区与原来相反,即图13中叶根弯矩MB为负。随着风速和风向的增加导致叶素攻角增加,如果叶素攻角的增加量大于停机变桨导致的叶素攻角降低量,则叶片的正、负压区的状态与原来保持一致,图13中叶根弯矩MB呈正方向,因此在停机、风加速过程中叶片的叶根弯矩MB正负交替,与正偏航角度偏差停机过程一致。
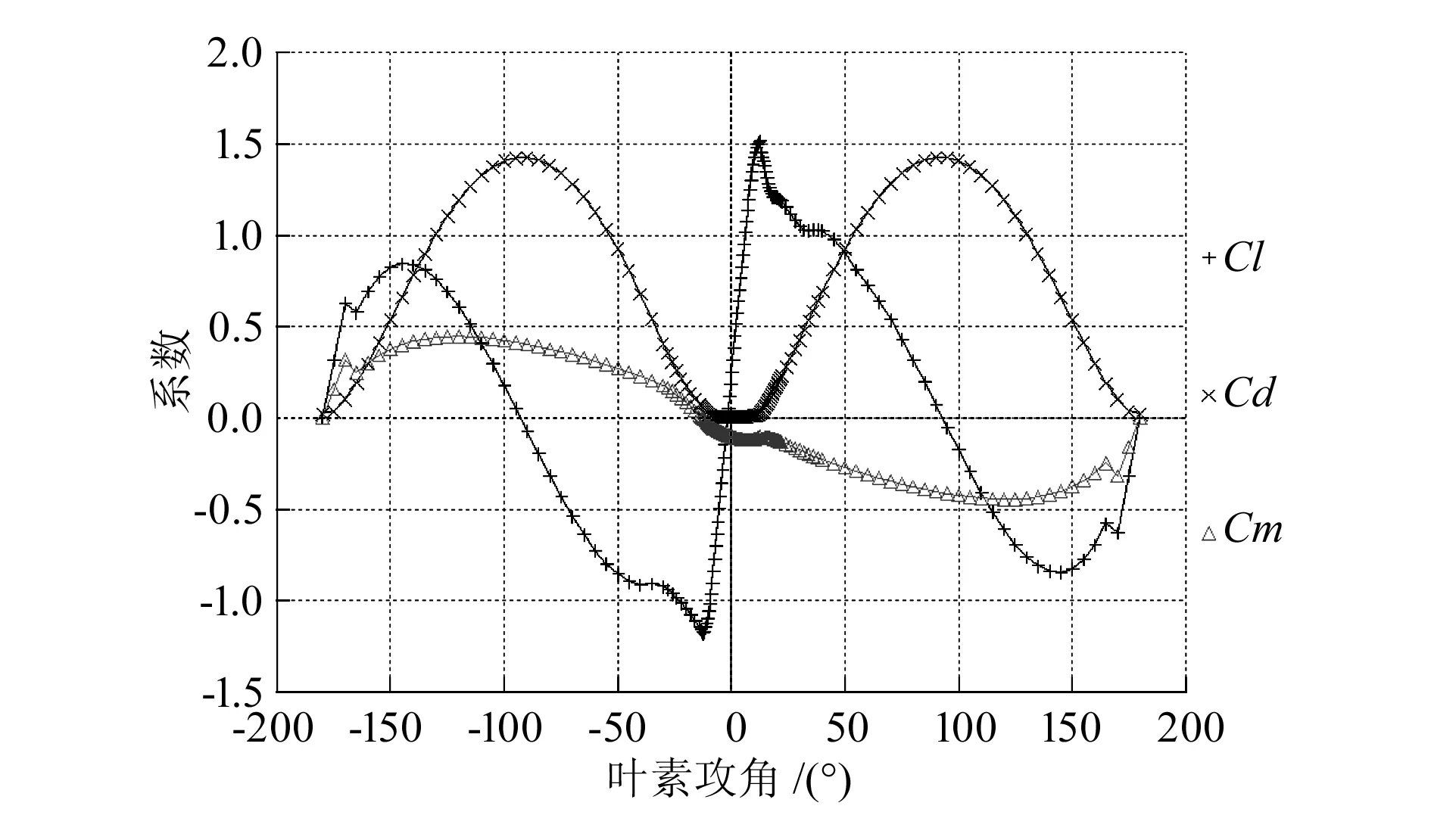
图16 叶素升阻系数随攻角变化
根据桨距角、攻角和偏航角度偏差间的关系[7],在大风时应设置较小的偏航保护限值,小风时应设置较大的偏航保护限值,以有效降低机组的载荷波动。
4 结论
本文对不同湍流风模型、机组运行状态下机组载荷随偏航角度偏差的变化趋势进行了仿真分析,研究了叶根、轮毂和塔顶载荷与偏航角度偏差的相关性,获得了极限载荷的偏航角度偏差范围及较低载荷的偏航角度偏差范围,提出了相关偏航保护策略,并对偏航保护策略进行了理论分析计算,得到结论如下:
1)通过对不同风模型下载荷仿真分析发现,叶根弯矩和偏航轴承弯矩分别在60°/300°、140°~220°时出现极限载荷,在机组待机或风轮锁定情况下,偏航角度偏差为40°或300°附近会出现叶根和偏航轴承极限弯矩载荷,在150°~250°载荷较小,因此当经过机组风的风向极端变化时,可以将机舱偏向风向150°~250°,有利于降低机组载荷。
2)根据机组极限载荷与偏航角度偏差的相关性确定偏航保护策略的保护限值,避免机组偏航到极端载荷对应的偏航角度;通过对偏航角度偏差限值触发停机过程的理论分析,结合桨距角、攻角和偏航偏差角间的关系,确定在大风过程中设置较小的偏航保护限值,小风过程中设置较大的偏航保护限值,以有效降低因攻角的正、负向移动导致的疲劳载荷波动。