大蒜收获机浮动切根装置作业机理分析与参数优化
2021-06-09于昭洋胡志超彭宝良张延化杨明金
于昭洋 胡志超 杨 柯 彭宝良 张延化 杨明金
(1.西南大学工程技术学院,重庆 400715;2.农业农村部南京农业机械化研究所,南京 210014)
0 引言
中国是大蒜主要生产国,中国大蒜出口量约占世界大蒜贸易量的90%,已连续多年位居中国蔬菜出口量第一位[1-3]。但中国大蒜生产机械化水平较低,尤其是收获环节,仍以人工作业为主,机械化收获面积不足5%,严重制约了中国大蒜产业的健康发展。
大蒜收获作业主要包括挖掘、清土、切根、切茎和打捆等工序。切根是技术难度最大的环节,国内外关于大蒜机械化切根技术的研究尚处于探索和试验阶段,与大蒜机械化挖掘、清土、切茎和打捆等环节相比,技术成熟度差距较大[4-7]。目前,中国已研发出二/四/六行切茎式大蒜联合收获样机[8-10],单行/四行打捆式大蒜联合收获样机[11-12],但尚无可完成切根作业的大蒜收获装备[13]。发达国家的大蒜收获技术较为成熟,但由于切根难度大和种植规模小等因素,已研发的收获机具很少具有切根功能。法国Erme公司、西班牙J.J.Broch公司、丹麦Asa-lift公司为欧洲主要大蒜收获装备生产企业,生产的切茎式和打捆式大蒜联合收获机涵盖了1~5行系列产品。日本Yanmar公司生产的单行大蒜联合收获装备可依次完成蒜株挖掘、清土、切根、切茎等工序[14],该机采用两片互相叠加、相向往复运动的锯齿刀切根,但刀片往复切割高度不能根据蒜头大小进行自动调整,蒜头适应性较差,实际切根作业效果不佳。
根系切净率低、鳞茎(蒜头)伤损率高是大蒜机械化切根技术尚未解决的两大关键问题。大蒜根部是由大量根须密集交织组成的根系群,根须横展、深度分布范围广,且根须一端与鳞茎连接,一端处于自由状态,切根装置需要解决无序、无支撑状态根系群的一次性高效切割问题。此外,大蒜根系着生部位的鳞茎大小各异、组织脆嫩,为降低鳞茎切割损伤和碰撞损伤,切根装置需要考虑不同鳞茎的适应性及接触部件的柔弹性。这些均对大蒜机械化切根技术提出了更高的要求。
基于大蒜联合收获机结构特点和作业要求,作者前期研发了一种大蒜联合收获浮动切根装置[15],该装置可在鳞茎顶部对齐状态下完成根系浮动切割,但其作业性能和适应性有待提升。本文针对浮动切根装置进行切根作业过程力学特性理论研究和高速摄影试验研究,以伤蒜率、切净率为主控目标,对影响切根作业质量的主要因素进行分析,寻求各因素较优参数组合,以期为大蒜机械化收获切根技术的提升和机构优化提供参考。
1 结构与工作原理
1.1 浮动切根装置结构
浮动切根装置主要由对齐链、回形板簧、螺旋切刀、螺旋防护栅、仿形轮、弹簧等组成,如图1所示。回形板簧配置在鳞茎运行轨迹的两侧;螺旋切刀内置于螺旋防护栅中,由直流电机驱动旋转;螺旋防护栅两端固定在仿形轮内侧,无动力驱动,可自由转动,不与螺旋切刀同步转动。该装置可完成鳞茎柔性导向、上球面对齐、下球面仿形、根系浮动切割。
1.2 切根试验台工作原理
为深入研究浮动切根过程力学行为产生过程、优化切根装置,本文构建了大蒜切根试验台,如图2所示。
作业时,蒜株在夹持链和对齐链的复式夹持作用下向后输送,毛刷辊首先作用于根系群,清理根系泥土、梳理并归拢杂乱的根系群;蒜株向后输送过程中,逐渐被夹持链向上拉动,使鳞茎上球面紧贴对齐链,鳞茎上球面对齐定位;同时,回形板簧引导并横向扶正鳞茎,避免鳞茎横向偏移;当鳞茎输送至螺旋防护栅前侧时,鳞茎底部逐渐抵压螺旋防护栅,使切根装置紧贴鳞茎下球面而仿形浮动,内置的螺旋切刀快速旋转,将嵌入螺旋防护栅内的根系群去除,实现根蒜分离。
2 切根作业过程受力分析
切根是蒜株与切根装置相互作用的结果,研究作业过程蒜株受力行为,明确蒜株与切根装置相互作用关系,可为切根作业机理研究和机构优化提供理论基础。切根作业过程中,蒜株依次完成根系清理、鳞茎横向扶正和对齐、根系浮动切割等阶段,各阶段对应的作业部件不同,蒜株受力形式和受力部位不同。
2.1 鳞茎碰撞接触力学分析
在切根作业过程中不可避免的会发生鳞茎碰撞,容易导致鳞茎的碰撞损伤。鳞茎碰撞主要发生在鳞茎横向扶正和对齐、根系浮动切割阶段。图3为切根过程的鳞茎碰撞示意图,点M和N附近为最有可能发生碰撞损伤的区域。
以鳞茎与螺旋防护栅碰撞为例进行分析,碰撞瞬间鳞茎受力和速度如图3c所示。鳞茎以相对速度v与螺旋防护栅碰撞,鳞茎受到法向碰撞接触力Fn和切向摩擦力Ft作用。其中,Fn使碰撞区的鳞茎组织法向速度vn逐渐减小,并发生压缩形变。同时,螺旋防护栅在Fn反作用力作用下,产生法向速度和压缩形变。当鳞茎法向速度vn减小至与螺旋防护栅法向速度相同,即两者相对速度为零时,鳞茎与螺旋防护栅相对位移不再减小,碰撞接触力增加至最大值Fnmax[16]。此时,碰撞动能被局部弹塑性形变所吸收,即碰撞过程中法向接触力做功等于初始碰撞动能[17-18],则
(1)
其中
式中β——碰撞点N切线与水平线夹角,(°)
m——鳞茎和碰撞体的等效质量,kg
m1——鳞茎质量,kg
m2——碰撞体质量,kg
s——碰撞接触力位移,m
λ——鳞茎吸收碰撞能量系数[18]
由式(1)求得全碰撞过程中最大接触力Fnmax为
(2)
根据Hertz碰撞接触理论[17],鳞茎碰撞过程接触应力Pn为
(3)
式中E——等效弹性模量,Pa
R——等效相对曲率半径,m
将式(2)代入式(3),求得全碰撞过程中最大接触应力Pnmax为
(4)
碰撞过程中,当最大接触应力Pnmax超过鳞茎弹性极限时,鳞茎发生不可恢复塑性形变,形成局部碰撞损伤。由式(3)、(4)可知,鳞茎与碰撞体的最大接触力、最大接触应力与鳞茎初始碰撞相对速度、鳞茎与碰撞体的等效质量、碰撞点切线角度正相关,与鳞茎吸收碰撞能量系数负相关;最大接触应力与等效弹性模量正相关,与等效相对曲率半径负相关。鳞茎初始碰撞相对速度为影响碰撞损伤的关键运动参数,而鳞茎初始碰撞相对速度取决于夹持链和对齐链输送速度。
2.2 根系切割力学分析
2.2.1根系滑切受力分析
大蒜根系切割为无支撑切割,采用滑切方式可以增强刀刃微观状态下的锯断作用[19],降低根系切割比阻,有效提高根系切净率。
图4为根系滑切原理图,取刃口中点处根系质点E为研究对象,质点E受力为刃口法向压力P和刃口的摩擦力Ps,其中P位于刃口ef与切刀运动速度va组成的切割面内。切割瞬间,根系由静止到速度陡增,获得较高瞬时加速度,并可分解为沿刃口ef和va方向的加速度as、aa。则切割面内质点N沿刃口ef和va方向的动力学方程为
(5)
其中
Ps=Ptanφ
式中mE——质点E质量,kg
α——滑切角,(°)
φ——根系与刃口摩擦角,(°)
针对该切根装置,滑切角α等于刃口倾斜角γ,由式(5)可知,当γ>φ时,形成滑切效应,且γ越大滑切作用越明显。但滑切角越大,质点N滑移距离越大,摩擦功耗显著增加。受空间尺寸限制γ的极限值为37°。
2.2.2刀刃切割阻力分析
为深入研究根系群切割瞬间切刀切割阻力产生机理,本节从细观角度对刀刃切割阻力力系组成及力学模型进行分析。
切刀切割根系群时,刀刃的刃口、刃面是切断根系、承受切割阻力的主要部位。如图5所示,切刀断根瞬间刀刃切割阻力主要包括:刃口处根系群施加的与切刀运动速度va反向的反作用力F0,被挤压根系群对外刃面挤压力F1x、F1y和摩擦力T1,被挤压根系群对内刃面挤压力F′1x、F′1y和摩擦力T′1[18]。将根系群作为具有一定物理特性(弹性模量、挤压/剪切应力、泊松比等)的整体单元进行分析,首先利用微分思想对外刃面分割,外刃面微单元平面X方向(即切刀运动速度va方向)受到挤压力dF1x[18],则
dF1x=σ1ldy=σ1ldxtanα1
(6)
式中 dx——X方向外刃面分割微单元,m
dy——Y方向外刃面分割微单元,m
l——刀刃有效长度,m
σ1——根系群在X方向的挤压应力,N/m2
α1——外刃面与va夹角,(°)
农作物茎秆群被挤压时其应力和应变可认为符合广义胡克定律,则根系群受到外刃面挤压时应力应变关系为[18]
(7)
式中εx——切刀上方根系群在X方向的应变
x——切刀上方根系群被刃口挤压的厚度,m
h——切刀上方根系群在X方向的总厚度,m
Ex——根系群在X方向的弹性模量,Pa
k——应变传递系数
将式(7)代入式(6),并对dF1x积分,求得外刃面在X方向的挤压力F1x为
(8)
外刃面微单元平面Y方向受到的挤压力dF1y为[18]
(9)
式中εy——切刀上方根系群在Y方向的应变
μ——根系群泊松比
Ey——根系群在Y方向的弹性模量,Pa
外刃面在Y方向的挤压力F1y为
(10)
外刃面受到的摩擦力T1为
T1=η(F1xsinα1+F1ycosα1)=

(11)
式中η——根系与刃面动摩擦因数
同理,求得内刃面受到的各项切割阻力为
(12)
式中x′——切刀下方未切根系群被挤压厚度,m
h′——切刀下方未切根系群总厚度,m
α2——内刃面与va夹角,(°)
刃口处受到的反作用力F0为
F0=δlσ0
(13)
式中δ——刃口厚度,m
σ0——根系群极限剪切应力,N/m2
切刀断根瞬间,刀刃受到的总切割阻力为
(14)
式中FX——切刀在X方向受到的总切割阻力,N
FY——切刀在Y方向受到的总切割阻力,N
为实现根系群切割,刀刃必须克服式(14)中切割阻力FX和FY。由上文理论分析可知,当切刀运动速度大小一定,刀刃的切割阻力与根系群物理特性(弹性模量、挤压/剪切应力、泊松比、根系群厚度等)、刀刃结构参数(刃口厚度、刀刃有效长度)有关,还与刃面和切刀运动速度的夹角有关。刀刃结构参数确定后,虽然外、内刃面角度已固定,但由于切刀采用倾斜配置(如图4所示),在刃口方向上,刃面与切刀运动速度的夹角是变化的,这种变化与刃口倾斜角γ有关。切割装置结构设计时,为减小切割阻力,应结合切割阻力力学模型,综合考虑各因素影响。
3 试验
3.1 试验物料
蒜株于2020年5月取自山东省金乡县马庙镇试验田,蒜株直立性较好,全部蒜株于1 h内由人工完成松土起秧,每株蒜根部带土单独装于密封袋内并冷藏。蒜株夹持状态下主根系长度76~117 mm,鳞茎直径46~75 mm。筛选出鳞茎和根系群几何尺寸接近,无病虫害、无损伤的蒜株作为试验物料。
3.2 高速摄影试验
3.2.1试验设备
为深入分析切根作业过程鳞茎、根群与切根作业部件相互作用关系,验证理论分析结果,本文在构建的切根试验台上开展高速摄影试验,试验现场如图6所示。利用Fastec HiSpec 5型高速相机记录切根过程鳞茎碰撞、根系群扰动、断裂等力学行为过程,进一步揭示切根作业机理。探测器分辨率1 696像素×1 710像素,控制软件HiSpec,拍摄帧频率250 f/s,曝光时间3 998 μs。对齐链输送速度1 m/s,对齐链与夹持链速比为1.02[15],螺旋切刀转速为2 300 r/min,刃口倾斜角26°。为便于观察,垂直于蒜株运动平面拍摄,并拆除仿形轮。
3.2.2切根过程高速图像解析
切根过程高速图像如图7所示,图中特征点由ProAnalyst运动学分析软件逐帧捕捉。以根系群与切根装置相互作用初始时刻为零时刻,设为第1帧图像,每10帧获取一次高速图像,时间间隔为0.04 s。
图7中采用绿色标记点对鳞茎特征点的运动位移逐帧标记。为便于分析,选择根系群左下部一点为根系特征点,采用红色标记点对其运动位移进行标记。第1~11帧,根系特征点的右侧部分逐渐进入切根装置,根系与鳞茎特征点相对位置无明显变化,说明被标记的根系未受到外力作用。第21~41帧,全部根系均已进入切根装置,根系特征点相对鳞茎向上移动,说明被标记的根系进入切根装置,受到切割力后并没有立即被切断,而是先发生了弯曲变形。通过试验观察,造成根系弯曲变形的原因有:先被切断的根系在脱离鳞茎飞出时,击打到未切根系,使其受力弯曲;切割线速度较小,根系不能产生足够大的惯性力使其在直立状态下完成切割。第71帧,根系完全脱离切根装置,但根盘左侧存在少量根系未被切净。试验统计发现,根系切割后,残留根系群长度均为左侧长、右侧短,即右侧先切根系容易切净,左侧后切根系经过反复击打和弯曲变形使其自身韧性增强,不易被切断。
图7中随机选取2根被切断根系,分别采用蓝色和黄色标记点对运动位移逐帧进行标记。由第51帧蓝色、黄色标记点轨迹可知,已切根系沿切刀回转切线方向高速飞出,且脱离切根装置的初始位置集中在切刀回转圆周的第3象限。第51帧后根系飞出数量明显减小,说明根系切割作用主要集中在螺旋防护栅弧顶位置。
图7中两条红色虚线的夹角即切根装置的摆臂与水平线的夹角。从第21帧鳞茎与切根装置开始碰撞,到第71帧鳞茎脱离切根装置,整个过程摆臂角度变化不大,两者的碰撞并没有使切根装置发生大幅度浮动,整个切根过程切根装置始终紧贴鳞茎下球面。由此说明,螺旋防护栅和弹簧的弹性作用,有效减弱了两者碰撞产生的冲击力。
3.3 参数优化试验
3.3.1作业指标
本文拟通过响应面试验,构建能够预测切根作业质量的多因素数学模型,进行浮动切根装置参数优化。根据收获后大蒜鳞茎贮藏要求,以伤蒜率Y1、切净率Y2作为切根作业指标。伤蒜率为碰伤、切伤鳞茎总质量与鳞茎总质量之比,切净率为已去除根系总质量与全部根系总质量之比。物料称量前清除鳞茎、根部泥土,于试验7 d后剥皮观察鳞茎的损伤。
3.3.2试验设计
通过上文理论分析和前期试验[20]可知,输送速度、螺旋切刀切割线速度和刃口倾斜角(图4中γ角)、螺旋防护栅螺距为影响切根质量的主要因素。输送速度指对齐链输送速度,对齐链与夹持链速比为1.02[15]。结构设计时切刀两端紧贴螺旋防护栅内侧,如刃口倾斜角增加,则切刀中段回转半径减小,切割线速度降低,因此,刃口倾斜角不易过大,在空间配置允许范围内最大值取35°;为保证滑切效果,刃口倾斜角最小值取17°。切刀转速越高,切割线速度越高,但转速过高,浮动切根装置振动明显,在保证浮动切根装置不发生明显振动条件下,切刀转速最大值取2 600 r/min;考虑到刃口倾斜角增加后,切刀中段回转半径减小,切刀转速不易太低,为保证根系群有效切割,切刀转速最小值取2 000 r/min。螺旋防护栅螺距越大根系群越容易嵌入切割,但过大会增加切伤的风险,而过小则根系群不能顺利嵌入切割,综合考虑鳞茎和根盘几何尺寸选取螺距最大值40 mm、最小值20 mm。由于回形板簧内侧增加橡胶垫,避免了鳞茎碰撞损伤,不再将回形板簧参数作为试验因素。
综上所述,以输送速度X1、切刀转速X2、刃口倾斜角X3、螺旋防护栅螺距X4为试验因素,伤蒜率Y1、切净率Y2为响应值,依据Box-Behnken Designs试验设计要求设计响应面试验[21-22]。试验因素及编码如表1所示。山东大蒜主产区种植模式普遍采用等行距平畦密植,株距相对垄作较小,对行收获时喂入密度大,为模拟实际收获连续喂入工况,每次试验人工同时喂入4颗蒜株,蒜株前后间距同种植株距为120 mm。由于蒜株直立性较好,联合收获时割台角度不变,则蒜株喂入时夹持链与茎秆的夹角基本保持不变,试验时固定该喂入角为79°[15]。
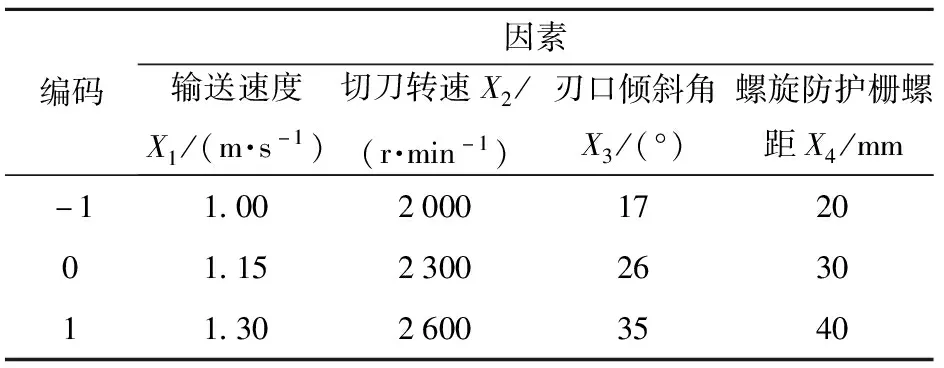
表1 试验因素编码
3.3.3试验方案与结果
试验共29组,每喂入50次为1组,每组试验重复3次,取3次平均值。响应面试验方案与结果如表2所示。采用Design-Expert软件对表2试验结果进行多元回归拟合及方差分析,得到伤蒜率Y1、切净率Y2的回归模型及其回归项显著性结果如表3所示。
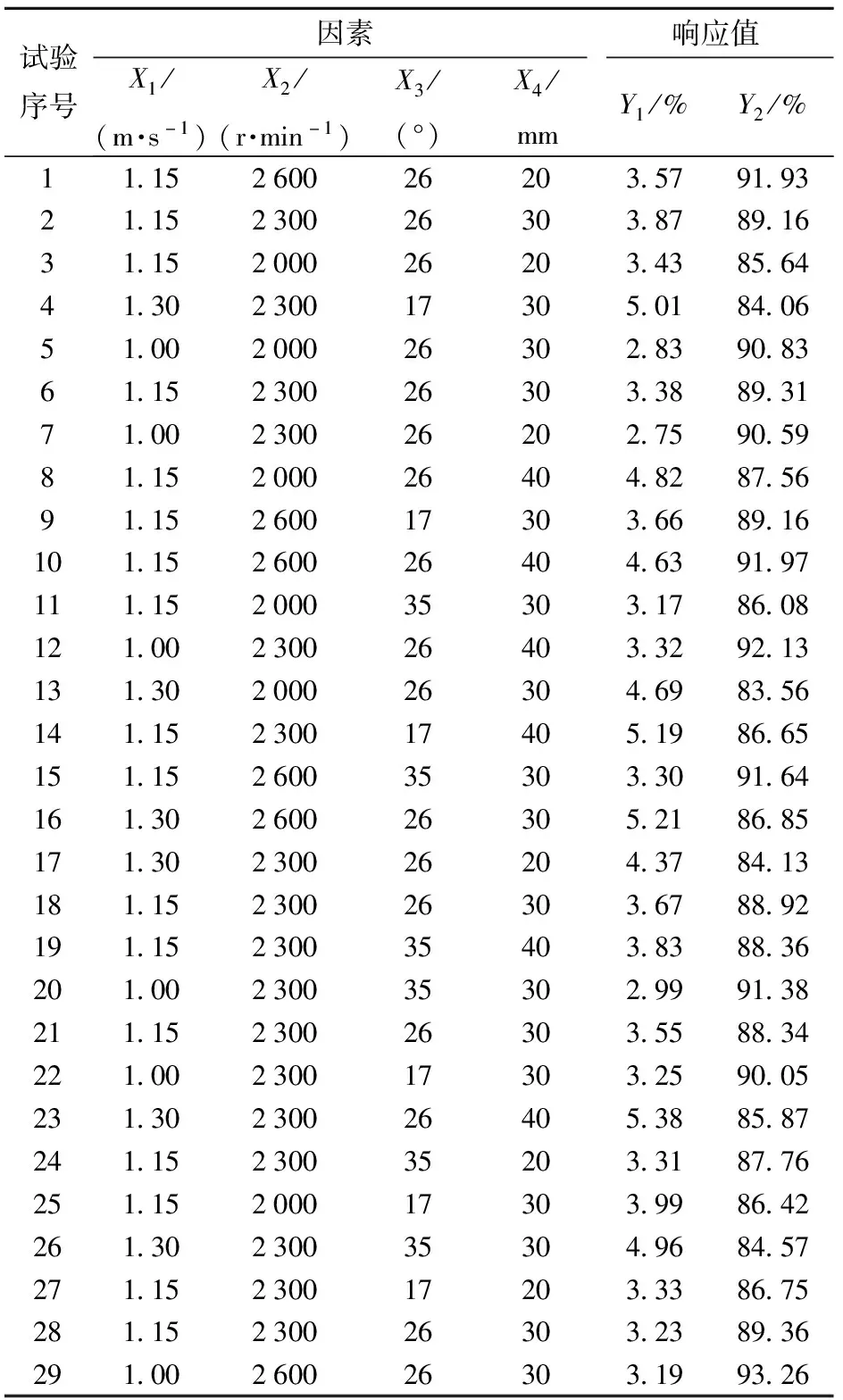
表2 试验方案与结果


表3 响应面试验方差分析
Y1=11.04-21.56X1+0.09X3-0.012X4-
(15)
Y2=67.48+37.33X1+7.78×10-5X2+0.19X3+

(16)
3.3.4试验因素对指标的影响分析
依据上述建立的两个作业指标的预测数学模型,分别选取对两个指标影响最重要的3个因素,采用Matlab软件绘制因素对指标响应的四维切片图[23-24],如图8、9所示,为更加直观、准确分析各因素对试验指标的影响趋势,作图时适当增加各因素取值范围。
由图8可知,输送速度越高、螺旋防护栅螺距越大、刃口倾斜角越小,则伤蒜率越高。原因可能为:当输送速度升高时,鳞茎与作业部件、鳞茎与鳞茎之间碰撞接触力增大,导致伤蒜率升高。螺旋防护栅螺距越大,鳞茎更容易透过螺旋防护栅,受到切刀切割作用,导致伤蒜率升高。由于切刀两端紧贴螺旋防护栅内侧,在割幅不变情况下,刃口倾斜角越小,螺旋切刀中段越接近螺旋防护栅弧顶位置,切刀更容易切到鳞茎,同时,螺旋切刀中段靠近螺旋防护栅弧顶,使切刀回转半径增大,切割线速度升高,也会导致伤蒜率升高。
图9为极显著因素对切净率的影响。由图9可知,切净率随输送速度升高、切刀转速降低而降低,随刃口倾斜角的增加,先升高后降低。原因可能为:输送速度升高,根系群通过浮动切根装置的时间缩短,使切割时间减小、切割次数减小,导致切净率降低。切刀转速降低,切割线速度降低,切割强度减小,导致切净率降低。刃口倾斜角增加,滑切角增大,切割阻力减小,切净率升高;但刃口倾斜角增加的同时,切刀中段也会逐渐远离螺旋防护栅弧顶位置,切刀回转半径减小,使根系切割长度减小、切割线速度降低,导致切净率降低。显著因素螺旋防护栅螺距对切净率影响趋势为:螺距越大根系群越容易嵌入切割,切净率越高。
3.3.5参数优化与验证
为获取浮动切根装置较优参数组合,采用Design-Expert数据分析软件Optimization模块,结合伤蒜率和切净率优化数学模型,进行双目标优化求解。设定约束条件:minY1,maxY2;1.0 m/s≤X1≤1.3 m/s、2 000 r/min≤X2≤2 600 r/min、17°≤X3≤35°、20 mm≤X4≤40 mm。优化得到的较优参数组合为:输送速度1 m/s,切刀转速2 600 r/min,刃口倾斜角33.45°,螺距27.52 mm;此时模型预测伤蒜率为2.72%,切净率为93.96%。
为确保优化结果的准确性,采用上述较优参数组合开展验证试验。考虑试验操作的可行性,将参数修正为输送速度1 m/s,切刀转速2 600 r/min,刃口倾斜角33°,螺距28 mm。验证试验重复3次取平均值。试验结果为伤蒜率2.78%,切净率93.17%。Y1、Y2的试验验证值与预测值差异很小,说明较优参数组合可靠。
4 结论
(1)建立了浮动切根作业过程鳞茎碰撞最大接触力和接触应力数学模型,得出鳞茎初始碰撞相对速度是影响碰撞损伤的关键参数;建立了滑切过程动力学方程,分析了根系滑切原理;推导了刀刃切割阻力力学模型,明确了根系群切割阻力的形成原因。
(2)通过高速摄影试验记录并解析了鳞茎碰撞、根系群扰动、断裂等力学行为的产生过程:已切根系的击打和切割线速度过小是根系发生弯曲的主要原因;根系群中后切的根系经过多次反复击打和弯曲变形,其自身韧性增强,不易被切断;根系切割作用主要集中在螺旋防护栅弧顶位置,已切根系沿切刀回转切线方向高速飞出,飞出初始位置集中在切刀回转圆周的第3象限。
(3)通过响应面试验得出,影响伤蒜率的主次因素依次为输送速度、螺旋防护栅螺距、刃口倾斜角、切刀转速,输送速度越高、螺旋防护栅螺距越大、刃口倾斜角越小,则伤蒜率越高;影响切净率的主次因素依次为输送速度、切刀转速、刃口倾斜角、螺旋防护栅螺距,切净率随输送速度升高、切刀转速降低、螺距增加而降低,随刃口倾斜角的增加,先升高、后降低。
(4)利用建立的切根作业质量预测数学模型进行了双目标优化求解,浮动切根装置较优参数组合参数为:输送速度1 m/s、切刀转速2 600 r/min、刃口倾斜角33°、螺距28 mm,试验测定伤蒜率为2.78%,切净率为93.17%,各项作业指标满足大蒜机械化收获切根作业要求。
