基于Opensim的柔性外骨骼机器人的模拟仿真
2021-06-08刘友福卢军
刘友福 卢军
摘 要: 现有的刚性外骨骼存在关节中心与人体下肢的生物关节中心较难对齐、限制人体运动的自由度和影响穿着舒适度等问题。针对上述问题,设计了一种由电机驱动的助力髋关节屈曲和伸展的柔性外骨骼机器人。基于该柔性外骨骼,利用三维动作捕捉系统和测力平台采集受试者在行走过程中的运动学和地面反作用力数据,运用生物力学分析软件Opensim建立人体-外骨骼模型;利用Opensim分别模拟计算出在行走时助力和不助力两种情况下驱动髋关节的主要肌肉的代谢值。模拟仿真结果表明:和不助力的情况相比,在行走过程中对髋关节助力会减小驱动髋关节运动的主要肌肉的代谢值,减小穿戴者肌肉的负担;在行走过程中减小穿戴者的能量消耗。
关键词: 柔性外骨骼机器人; 髋关节助力; Opensim; 仿真; 肌肉代谢
中图分类号:TP242.6 文献标识码:A 文章编号:1006-8228(2021)01-01-05
Simulation of soft exosuit using Opensim
Liu Youfu1,2, Lu Jun1
(1. College of Mechanical & Electrical Engineering, Shaanxi University of Science and Technology, Xi'an, Shaanxi 10708, China;
2. Shenzhen Institutes of Advanced Technology, Chinese Academy of Science)
Abstract: The existing rigid exoskeleton has some problems, such as the joint center is difficult to align with the biological joint center of human lower limbs, limiting the freedom of human movement and affecting the wearing comfort. A motor-driven soft exosuit assisting hip flexion and extension was designed to solve the problems above. The three-dimensional motion capture system and force measurement platform were utilized to collect the subjects' kinematics and ground reaction force data during walking. A human body-soft exosuit model was built by using Opensim. Opensim was used to calculate the metabolism of the main muscles of the hip joint during walking. The simulation results show that, compared with the situation without assistance, the hip flexion and extension with assistance reduced the metabolic value of the main muscles that drive the hip joint movement and reduced the wearer's muscles burden and energy consumption.
Key words: soft exosuit; hip assistance; Opensim; simulation; muscles metabolism
0 引言
外骨骼机器人是一种新型仿生设计的可穿戴设备。外骨骼机器人起源于上个世纪60年代,在过去的几十年里,下肢可穿戴外骨骼机器人技术取得了重大发展,广泛应用于医疗康复领域,旨在帮助截瘫、中风患者进行活动能力恢复和步态纠正等[1-2];并且在军队、工业生产等领域具有潜在的应用价值[3-4]。但是,上述外骨骼机器人大多采用刚性结构,由于刚性外骨骼关节中心与人体下肢的生物关节中心较难对齐[5-6];且刚性结构限制了人体运动的自由度并影响穿戴舒度[7-8]。为了解决上述问题,研究学者们提出了性下肢外骨骼,柔性外骨骼主要使用柔性材料,电机驱动,控制电机旋转驱动柔性线绳伸缩以产生拉力[9],作用于人体的相应关节,以提供辅助力;这类外骨骼大多应用于人体行走过程中助力,以减少肌肉代谢[10-11]。近些年來一些研究学者们常使用实验法和生物力学仿真软件来研究人机耦合关系,比如研究健康成年人穿戴下肢外骨骼时,下肢外骨骼在支撑相其膝关节力矩的影响[12];模拟下肢外骨骼康复机器人在矢状面内的运动,比较分析下肢主要肌肉的收缩速率变化情况[13]。这些研究大多都基于刚性外骨骼,我们设计了一种能助力髋关节伸展和屈曲的柔性外骨骼机器人。为了模拟我们设计的柔性外骨骼机器人在助力时的效果,将助力髋关节的伸展和屈曲的助力过程抽象转化成被动弹簧原件作用于人体的髋关节,并随着步态变化而伸缩的过程,对外骨骼施加于髋关节伸展和屈曲阶段的辅助力进行模拟。利用运动捕捉系统(Vicon)和测力平台采集健康成年男性在平地行走时的状态参数以及地面反作用力等数据;然后利用开源人体生物力学分析软件Opensim建立骨骼肌模型,并在模型的髋关节处添加上沿肌肉路径的弹簧元件,并配置该弹簧执行器的状态参数,导入由Vicon、测力跑台采集的运动学数据和力数据,对该模型进行动力学参数和肌肉参数模拟仿真,仿真结果可以定量分析在不助力和助力时,下肢肌肉的代谢值变化,为后期优化外骨骼的设计与控制提供参考。
1 柔性外骨骼系统
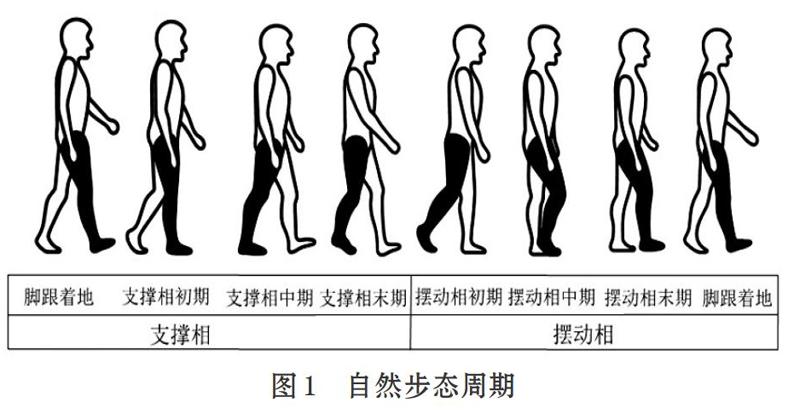
一个人自然步态周期可劃分为支撑相和摆动相,支撑相可以细分为支撑相初期,支撑相中期,支撑相末期;摆动相可以细分为摆动相初期,摆动相中期和摆动相末期[14],如图1所示。
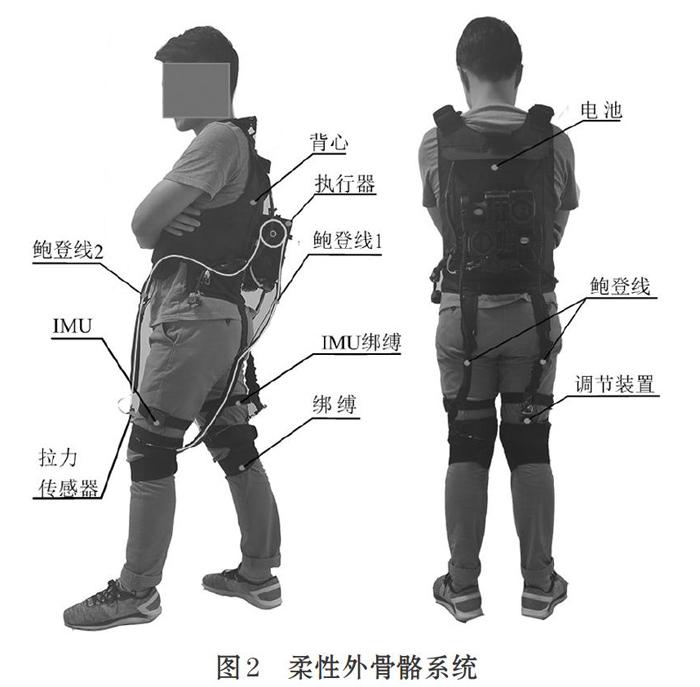
髋关节伸展和屈曲分别发生在一个步态周期内的支撑相和摆动相阶段[15]。设计了一种能为髋关节伸展和屈曲提供助力的柔性外骨骼。外骨骼系统由执行器,绑缚,拉力传感器,惯性测量单元(IMU),鲍登线和调节装置组成;结构如图2所示。
左腿的伸展和右腿髋关节屈曲几乎完全相反的两个相位。执行器主要由两台无刷直流电机组成,使用一个电机为右腿(或左腿)髋关节伸展和屈曲运动提供辅助力,电机输出轴与线盘相连。每个线盘上固定两根鲍登线—鲍登线1和鲍登线2;鲍登线1顺时针缠绕在线盘上以助力髋关节伸展,鲍登线2则逆时针缠绕用于助力屈曲(如图2所示)。
鲍登线的另一端和拉力传感器相连,拉力传感器的另一端连接到线绳调节装置,调节装置用来根据佩戴者的身高和步幅来调整鲍登线的长度;最后,线绳再与包裹在大腿上的绑缚锚点相连。其工作原理是:通过控制电机旋转方向,带动线盘旋转,鲍登线伸缩产生额外的拉力,拉力通过鲍登线作用于人体下肢关节上。
2 模拟仿真方法
2.1 运动学和动力学数据采集
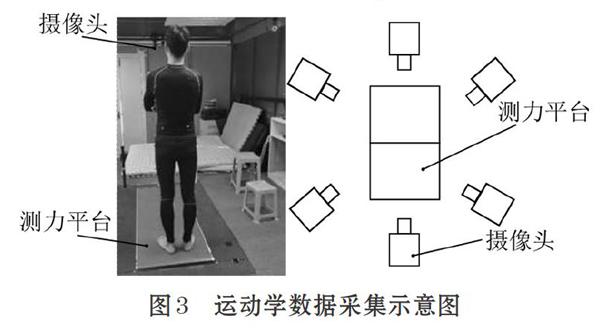
在配套有六台红外摄像机的三维运动捕捉系统(VICON, Oxford, UK),和一台嵌入跑步机的测力平台(AMTI, Watertown, MA)上进行行走试验。动作捕捉系统主要通过摄像头捕捉贴在身体上的荧光标记点采集人体的运动学数据。地面反作用力通过测力台采集,分别采集三名健康男性的运动学和力数据。
在Vicon系统的上位机输入相关的人体参数,系统会通过输入的人体参数进行计算处理保存到输出文件中。在数据采集过程中,受试者在身体上贴上荧光标记点,静止站立在测力平台上,通过摄像头捕捉标记点在系统坐标系下的静态空间坐标数据,随后启动测力跑台,采集荧光标记点在动捕系统坐标系下的运动数据,以及在行走过程中的测力平台的作用反力。采集过程示意图如图3所示。
由于Opensim对输入的运动学和动力学数据的文件格式有着严格的要求,所以需将采集到的数据以特殊的文件格式保存,将通过摄像头采集到的荧光标记点的静态数据保存为.trc文件格式;通过测力台采集的地面反力数据保存为**grf.mot格式。运动学数据则保存为 .mot格式,该文件中保存着受试者的运动学数据,比如关节角度,速度等。最后通过上位机输出,这些文件将被应用于下一步的Opensim仿真。
2.2 Opensim仿真模型
Opensim是美国斯坦福大学开发的一款开源应用于生物力学分析研究的工具平台,它具有对肌肉形态参数控制精细、计算误差小、计算速度快等优点[16]。考虑到人体系统复杂性以及受到伦理道德的限制,目前现有的一些实验手段难以测量人体肌肉的代谢情况。通常,将人体简化成一个多刚体模型,利用Opensim建立人体骨骼肌模型。
OpenSim人体骨骼模型其建模的理论基础是Hill肌肉结构力学模型,以肌肉形态参数为基础建立通用人体骨骼肌肉模型,如图4所示。
Opensim官网提供了许多骨骼肌模型,本文中使用下肢骨骼肌肉生物力学模型Gait2354_Simbody,在此基础上进行修改。由于人体以正常步态行走时,髋关节主要以屈伸运动为主,考虑到其外旋/内旋,外展/内收的运动幅度相对较小,在建立助力的仿真模型时,仅考虑在矢状面内的屈曲和伸展运动。在右腿支撑相时期,右髋关节伸展,右侧下肢肌肉需要对来自地面的冲击以及人体体重进行承重,此时包括臀大肌,股二头肌等大腿后侧肌肉群作为主动肌肉,股四头肌等大腿前侧肌肉群作为主要的制动肌,尤其以股直肌的作用最为明显。当右腿从支撑阶段进入摆动阶段时,右腿膝关节开始弯曲并抬腿,髋关节开始屈曲。考虑到右腿在摆动相时,主要是重力在做功[17]。结合在第1节中依据步态特点设计的柔性外骨骼的工作原理以及辅助力的施加部位,基于在人体的髋关节处添加平行于大腿(以右腿为例)被动弹簧驱动原件[18],仅考虑元件没有质量,该模型如图5所示。
在支撑相阶段(以右腿为例),右脚刚着地时,弹簧1处于原长状态,随着右腿的伸展,此弹簧元件处于拉伸状态,完成能量的存储;相反,弹簧2在右脚刚着地处于最大拉伸状态,随着右腿伸展,弹簧2释放能量,恢复原长,帮助人体伸展右腿。到支撑相结束,开始进入摆动相时,大腿开始屈曲,弹簧1开始释放能量,帮助右腿屈膝抬腿,而弹簧2此时处于原长状态,随着大腿的摆动。弹簧2开始存储能量。
2.3 Opensim模拟仿真过程
通过三维运动捕捉系统采集的标记点在动捕系统坐标系下的静态数据和Opensim中模型的虚拟点之间的距离进行匹配,使系统提供的骨骼肌模型和受试者实际的身体数据相匹配,依据受试者的身高体重等身体特征参数以及2.1节中采集的静止状态下的标记点数据为依据,对Opensim中的骨骼肌肉模型进行比例缩放,并使用软件内置最小二乘法算法来减少软件中模型和实际人体参数的误差,使之更加贴近实际的人体模型,从而建立起符合受试者个体特征的个性化模型;接着通过逆向运动学求解,主要目的在于找到与实验室运动学数据最佳匹配的模型。通过使用Opensim软件的逆向运动学(IK)工具,可以在软件内显示出经由动捕系统计算出来的的运动信息,比如关节角度等。在求解过程中,不考虑产生的力和力矩,采用2.1节中采集的在行走状态下标记点的运动数据,遍历行走过程中动作的每个时间步,或每一帧,使模型“最好地”匹配实际的运动学,使用Opensim残差缩减算法(RRA)来减少由于标记点的空间信息、测力平台采集的数据的误差和骨骼肌模型之间的不一致而产生的残差力,让模型的运动过程更符合实际运动特点。
最后,通过导入2.1节中由测力平台采集的人体与测力平台的反力数据,采用逆向动力学的方法进行逆向求解人体各关节的关节力等;但是由于模型的构造误差或动捕系统采集数据的误差将会导致计算结果会有很大的偏差。任需要通过使用残差缩减算法(RRA)进行轨迹优化和质量调整,把测力平台的反作用力与人体惯性参数相结合,将逆向动力学计算时产生的误差控制到最小。由于OpenSim的正向动力学是模拟人体行走的,人体的关节运动由肌肉产生的肌肉力驱动。为了更好的模拟肌肉的收缩,利用Opensim提供的CMC优化算法,此算法可以改变模型中的肌肉参数,对人体动作模拟仿真中肌肉力量进行分配[19],可以更好地模拟肌肉的收缩过程。
3 结果与分析
人体在运动状态下,调动休眠的肌肉参与活动,这些被调动的肌肉称为激活。参与活动的肌肉群越多,其力量和激活程度等方面比较高,激活度就越高,反之则激活度越低[20]。Opensim提供了一种名为代谢探针的方法,通过在模型中设置的代谢探针可以计算模型肌肉的代谢值,可以模拟计算在运动过程中,下肢各相关肌肉的肌肉的代谢值,肌肉的代谢值越大说明肌肉激活程度越大。分别进行不助力和助力两种情况的仿真实验,驱动人体髋关节(以右腿为例)的主要肌肉(包括髂腰肌、腘绳肌、股直肌、股二头肌等)的代谢值变化如图6至图9所示。
通过观察曲线图可以看出,在Opensim仿真环境中,人正常行走不助力时,人体肌肉调动被激活,代谢增强;当驱动模型中的弹性元件对模型进行助力时,下肢整体代谢值相比不助力时有所减少,其他核心肌肉的代谢值均有所减小。这说明人在行走时对髋关节助力能有效地减轻下肢驱动髋关节的肌肉的负担。
4 结论
基于我们设计的柔性外骨骼机器人,根据人体在行走过程中的步态特点,将外骨骼对人体的助力方式抽象转化成一种被动弹簧元件,在Opensim中建立仿真模型,模拟助力过程,分别比较了在不助力和助力两种情况下人体驱动髋关节的主要肌肉的代谢值的变化,模拟实验的结果表明,与行走过程中不助力的情况相比,柔性外骨骼机器人在助力时,能减少相关肌肉的代谢,可以减小穿戴者在穿戴外骨骼行走时的能量消耗,达到为人体助力的效果。
參考文献(References):
[1] Ding Y, Galiana I, Siviy C, et al. IMU-based iterative control for hip extension assistance with a soft exosuit[C]//2016 IEEE International Conference on Robotics and Automation (ICRA).IEEE,2016:3501-3508
[2] Masood J, Ortiz J, Fernández J, et al. Mechanical design and analysis of light weight hip joint Parallel Elastic Actuator for industrial exoskeleton[C]//2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob). IEEE,2016:631-636
[3] Neuhaus P D, Noorden J H, Craig T J, et al. Design and evaluation of Mina:A robotic orthosis for paraplegics[C]//2011 IEEE international conference on rehabilitation robotics. IEEE,2011:1-8
[4] Ohta Y, Yano H, Suzuki R, et al. A two-degree-of-freedom motor-powered gait orthosis for spinal cord injury patients[J]. Proceedings of the Institution of Mechanical Engineers Part H Journal of Engineering in Medicine,2007.221(6):629-639
[5] Schiele A. Ergonomics of exoskeletons:Objective perfor-mance metrics[C]//World Haptics 2009-Third Joint EuroHaptics conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems.IEEE,2009:103-108
[6] StienenStienen A H A, Hekman E E G, Van d H F C T,et al.Self-Aligning Exoskeleton Axes Through Decoupling of Joint Rotations and Translations[J]. Robotics IEEE Transactions on,2009.25(3):628-633
[7] Asbeck A T, Rossi SMM D, Holt K G, et al. A biologically inspired soft exosuit for walking assistance[J].International Journal of Robotics Research,2015.34(6):744-762
[8] Asbeck A T, Schmidt K, Galiana I, et al. Multi-joint soft exosuit for gait assistance[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE,2015:6197-6204
[9] Wehner M, Quinlivan B, Aubin P M, et al. A lightweight soft exosuit for gait assistance[C]//2013 IEEE international conference on robotics and automation.IEEE,2013:3362-3369
[10] Lee S, Crea S, Malcolm P, et al. Controlling negative and positive power at the ankle with a soft exosuit[C]//2016 IEEE International Conference on Robotics and Automation (ICRA).IEEE,2016:3509-3515
[11] Kim, Jinsoo, et al. Reducing the metabolic rate of walking and running with a versatile,portable exosuit[J]. Science 365.6454 (2019):668-672
[12] McGibbon C A, Brandon S C E, Brookshaw M. Effects of an overground exoskeleton on external knee moments during stance phaseof gait in healthy adults. Knee,2017.24(5):977-993
[13] 項忠霞,赵明,高飞等.一种外骨骼式康复机器人训练效果仿真[J].天津大学学报:自然科学与工程技术版,2016.49(7):695-701
[14] Kikuchi T, Tanida S, Otsuki K, et al. Development of intelligent Ankle-Foot Orthosis (i-AFO) with MR fluid brake and control system for gait control[M]//Service robotics and mechatronics. Springer, London,2010:75-80
[15] Perry J, Davids J R. Gait analysis: normal and pathological function[J].Journal of Pediatric Orthopaedics,1992.12(6):815-826
[16] 詹晓彤,陈强,李志勇.基于OpenSim的腰部肌骨系统在体前屈状态下生物力学分析[J].医用生物力学,2019.34(1):27-34
[17] Wu Y, Zhu A, Shen H, et al. Biomechanical simulation analysis of human lower limbs assisted by exoskeleton[C]//2019 16th International Conference on Ubiquitous Robots (UR),2019.
[18] Dembia C L, Silder A, Uchida T K, et al. Simulating ideal assistive devices to reduce the metabolic cost of walking with heavy loads[J].Plos One,2017.12(7):e0180320
[19] Kuo A D. A least-squares estimation approach to improving the precision of inverse dynamics computations[J].Journal of Biomechanical Engineering,1998.120(1):148
[20] 赵闯,蔡玉强.基于OpenSim人体步行腓肠肌静态生物力学分析[J].科学技术与工程,2020.7:2604-2608
收稿日期:2020-08-14
基金项目:广东省基础与应用基础研究基金(2019A1515110576)
作者简介:刘友福(1995-),男,四川巴中人,硕士研究生,主要研究方向:智能机器人技术。