基于小波分析的电磁阀在轨实时诊断
2021-06-07王钦惠胡向宇崔梧玉孙迎萍
王钦惠,胡向宇,崔梧玉,孙迎萍
(兰州空间技术物理研究所,兰州 730000)
0 引言
电磁阀是一种用电磁控制的执行元件,具有体积小、动作可靠、质量轻等优点,广泛应用于航空、航天领域。根据工作原理不同,电磁阀可以分为三类:直动式电磁阀、分步直动式电磁阀和先导式电磁阀。
在航天器主动电位控制系统中,电磁阀作为执行器用于控制储供系统中的氙气工质的截止和流通,从而实现等离子体源的喷出流量控制,是主动电位储供气单元的核心控制部件。
主动电位控制系统中选用了直动式电磁阀。该电磁阀工作原理简单并且比较容易控制,在对其加电时,电磁线圈产生的磁力将阀座上的关闭件提起,使阀门打开;断电时,磁力消失,关闭件被弹簧压在阀座上使阀门关闭。
航天器在轨工作期间,电磁阀的工作状态直接影响等离子体的喷出量、喷气时长等的精确控制,影响整个系统的有效性;其工作过程决定整个系统的性能,其可靠性影响整个系统的安全性,因此对其故障进行实时检测尤为重要。2009年,肖永超[1]利用磁场和加速度传感器检测磁场和振动信号进行了电磁阀故障诊断。2011年,谢芳[2]通过检测液压阀进出口压力和流量的变化检测了电磁阀的故障。Li等[3]开展了基于电流传感器的电磁阀正常和阀芯卡滞状态分析。在工程应用中,由于上述方法操作复杂,对原系统会造成干扰,因此具有局限性。
实验与理论分析发现,电磁阀处于不同的运动状态时,其驱动电流不同,电流信息包含较多电磁阀工作状态信息。通过检测电磁阀驱动电流可实现电磁阀工作状态监测和故障诊断。本文通过检测电磁阀卡滞状态和正常状态下的驱动电流,分析比较不同状态下电流波形的差异,提出一种快速的、可在轨实现的电磁阀故障诊断方法。
1 电磁阀结构及工作原理
电磁阀主要由四部分组成:阀体、阀芯、弹簧和线圈。其工作原理是:当阀不工作时,阀体通过弹簧力和介质压力的共同作用紧密地连接到阀座上,以阻止介质流动。线圈通电后,线圈产生电磁力。随着线圈中电流的增加,电磁力迅速增加。当电磁力足以克服弹簧力和介质压力时,阀芯被吸引,阀门打开,开始供给介质。当线圈断电时,电磁阀关闭,电磁力小于弹簧力和介质压力,阀芯恢复为初始状态,阻止介质流动[4]。
电磁阀励磁线圈通电后,线圈的负载电流按照指数定律从零开始增加,阀承受的电磁吸力也相应增加。当电磁吸引力增加到足以克服负载力时,阀芯开始移动并切断磁力线以产生强大的反电动势,导致电流急剧下降,直到阀芯被完全吸引为止。此后,电流继续增加至稳定状态。电磁阀的打开过程包括一个吸引触发阶段、一个吸引运动阶段和一个通电保持阶段。在电磁阀的工作过程中,阀芯的释放过程与吸引过程相似。通过这种机电耦合关系,可以使电磁阀内部的机械运动与电流变化相关联,并且可以在时域中检测加载在励磁线圈上的电流,从而获得电磁阀工作时的电流曲线[5]。
2 驱动电路
基本的电磁阀驱动电路如图1所示,其中ZG_OC1为指令端,ZG_N1连接电磁阀正极接线柱。当电磁阀工作时,由控制系统发出指令打开电磁阀,OC门打开,控制MOSFET(图1中Qn6,可选用类似于TN0106的器件)导通,从而在电磁阀的正极接线柱(ZG_N1)和负极接线柱(GND)之间形成电势差,使电磁阀打开;当需要关闭电磁阀时,由控制系统发出关闭电磁阀指令,OC门关闭,控制MOSFET截止,电磁阀的正极接线柱(ZG_N1)和负极接线柱(GND)之间电势差消失,电磁阀线圈无电流,电磁力消失,电磁阀关闭。
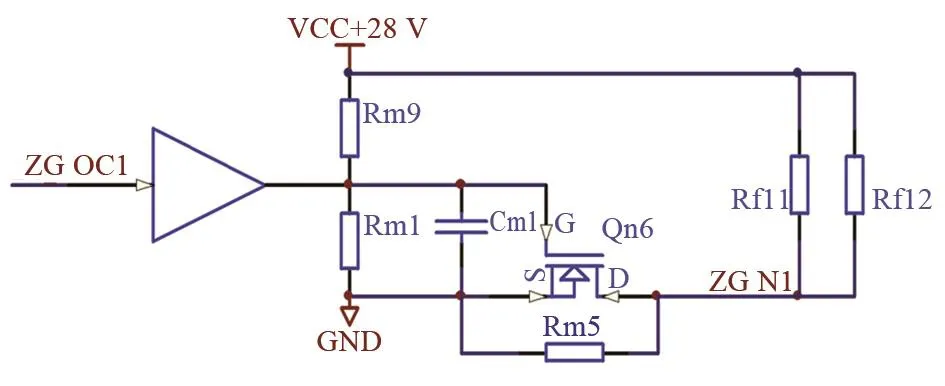
图1 电磁阀驱动电路Fig.1 Drive circuit of magnetic valve
图1中,Rm1和Rm9是分压电阻,为MOSFET正常工作提供偏置电压;Rf11和Rf12是限流保护电阻,为MOSFET提供合适的漏极工作电压和电流;Rm5是漏源保护电阻;Cm1是滤波电容;VCC是28 V供电电压,为驱动电路提供能源。
3 实验结果
通常在工程应用中,通过在电磁阀检测回路中加入精密的小阻值电阻作为检测电阻提取驱动电流。本研究中,对使用的电磁阀进行破坏性实验,并通过更改常规阀的内部结构和组件状态来模拟典型的电磁阀故障:在阀芯内侧加入垫片阻止阀芯的正常打开,模拟阀芯打开状态卡滞;在阀芯外侧加入垫片阻止阀芯的正常关闭,模拟阀芯的关闭状态卡滞。在电磁阀卡滞与正常状态下,通过高速AD采集检测电阻两端的电压,并根据欧姆定律将其转换为电流值,送入主控单元进行数据分析,实现电磁阀工作状态诊断。实验获得的电磁阀正常状态和卡滞状态下开启驱动端的电路波形如图2所示。

图2 电磁阀驱动端电流波形曲线Fig.2 Current waveform of magnetic valve
通过对驱动端电流的采集与分析发现,电磁阀在正常状态下驱动,电流信号有一个突变振动。这是由于电磁阀的阀芯运动到最大位移处之前,阀芯速度持续增大,使得回路中感应电动势逐渐增大,最终导致电流变化率降低。当电磁阀出现卡滞故障时,由于阀芯卡滞不移动,驱动波形中不会产生类似的信号突变。因此可利用驱动端电流检测实现电磁阀的故障诊断。
4 数据分析
信号分析是为了获取信号变化在时间域和频率域之间的相互关系。期望通过信号分析区分正常状态和卡滞状态下的电流特性,实现故障诊断。小波分析结合了泛函分析、傅里叶分析、样条分析、调和分析和数值分析,具有强大的多尺度分析功能,可应对突然而不稳定的信号变化[6-8]。与傅里叶变换不同,小波变换是通过母小波的平移获得信号的时间特性,将小波尺度缩放可以获得信号的频率信息,因此,小波分析具有时域和频域分析的准确性。
实际采集到的驱动端电流波形有突变特征,因此首先选择小波分析方法对原始信号进行初步分析。选择采样频率为10 kHz,通过AD分别采集电磁阀内侧卡滞、外侧卡滞和正常状态下的驱动端电流各300个数据点,从每一组数据中截取其中293个数据作为被分析信号序列。借助MATLAB2008a软件,运用db3母小波将两组信号分别进行5层多分辨率分解,结果如图3和图4所示。

图3 电磁阀驱动端电流小波分析图Fig.3 Wavelet analysis diagram of magnetic valve current
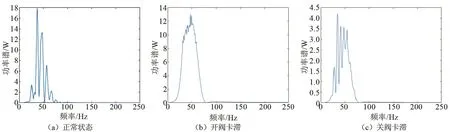
图4 小波d3层信号功率谱分布曲线Fig.4 Power spectrum of level d3 wavelet
从图3可以看出,实验用电磁阀正常状态和卡滞状态的驱动端电流的差异性主要分布在小波分析的d3层,对该层信号进行功率谱分析可以获得其主要频率分布,结果如图4所示。由图4可知该信号频率范围主要在20~80 Hz。
若用工程实际中的驱动端电流信号进行故障的实时诊断,对信号分析算法的计算量有一定的要求。而小波分析需要较长的计算时间,采用小波分析获得d3层数据后进行数据分析处理无法满足航天器在轨故障诊断实时性要求。为了减少运算量,设计一个带通滤波器,使滤波器的中心频率为50 Hz,通带带宽为60 Hz。该滤波器的幅值响应如图5所示。
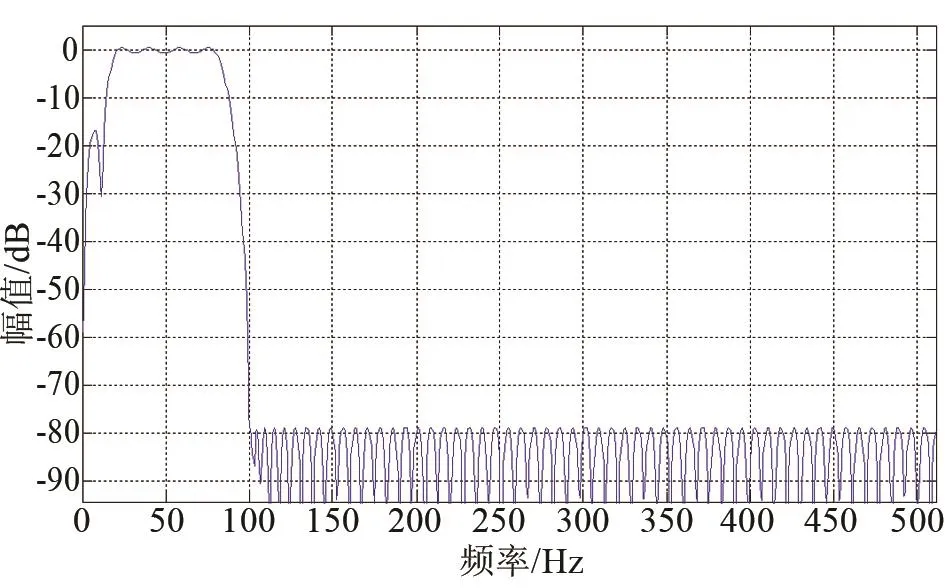
图5 带通滤波器幅值响应曲线Fig.5 Amplitude response of band-pass filter
驱动端电流信号通过上述带通滤波器滤波后的波形如图6所示。
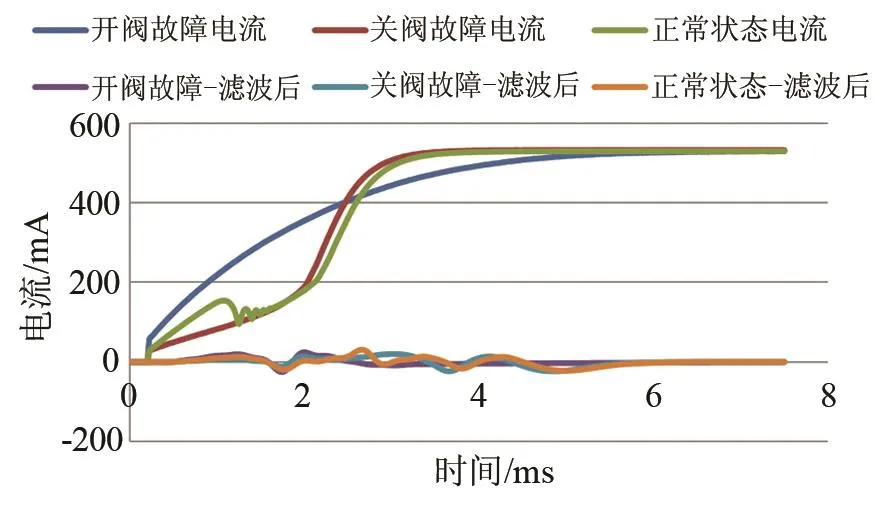
图6 驱动端电流信号通过带通滤波器滤波后的波形曲线Fig.6 Current waveform after band-pass filter
滤波后的波形包含20~80 Hz的频带信息。对于电磁阀正常状态,该频带包含电磁阀通电的电流阶跃信号以及阀芯提起引起的突变振荡信号;电磁阀开阀故障下,该频带包含电磁阀通电的电流阶跃信号,但无阀芯提起导致的电流突变振荡信号;对于电磁阀关阀故障,该频带包含电磁阀通电的电流阶跃信号,关阀故障促使阀芯提起电流突变振荡信号略早于正常状态,因此,可通过滤波后的波形实现电磁阀开阀、关阀故障诊断。
5 总结
(1)航天器在轨运行阶段,对于搭载的电磁阀,无法通过结构外观等本征参数判断其工作状态,但可通过驱动端电流来反映电磁阀的阀芯运动状况,并可区分出电磁阀的正常状态和阀芯卡死故障,因此可通过提取电磁阀驱动电流波形获取其工作状态信息。
(2)对于不同厂家规格型号批次的电磁阀,其驱动电流故障信息的频率带不同。为避免带通滤波器的盲目设计,可结合小波分析与功率谱分析,获得可反映故障信息的层,获取该层对应的中心频率,设计合适的滤波器,并确定阈值,从而获得故障信息。
(3)在航天产品应用中,可采用高速AD对通过带通滤波器的信号进行数据采集,设定适当阈值提取故障信息,实现电磁阀开关阀故障实时诊断。本实验选择速度为200 Mbps的AD,单次采集300个电流数据点进行滤波,所需诊断时间为9 ms,满足在轨实时性要求。基于驱动端电流检测的电磁阀故障诊断为电磁阀的故障检测、维护和修理提供了依据,为航天器系统状态自检提供数据支撑,可提高系统在轨运行的安全性和可靠性。