激光测速仪定焦系统设计
2021-06-04吕丹,林军,2,3,周健
吕 丹,林 军,2,3,周 健
(1.福建省计量科学研究院,福建 福州 350003;2.福建省能源计量重点实验室,福建 福州 350003;3.国家城市能源计量中心(福建),福建 福州 350003;4.国防科技大学,湖南 长沙 410000)
1 引 言
超速作为交通事故的一个重要原因之一,如何快速准确地测量车辆速度就成为计量的一个新课题[1]。激光多普勒测速仪在非接触探测中发挥的作用越来越明显,无机械磨损部分,可长期稳定保持高精度测量,且空间分辨率好,只需测量较小的区域,受外界影响小[2~4]。而为了测量设备的安全,测速仪需要与被测车辆之间保持一定的距离,同时由于车辆的运动位置并不确定,为了能在一定范围内探测车辆速度,要求测量设备拥有一定的测量景深。
激光测速仪在测量米级距离的运动目标时,由于激光束具有一定的发散角,如果不采取任何聚焦措施,照射在米级距离运动物体表面的光斑半径就会有所扩大。信号的信噪比与照射在物体上的光斑大小密切相关,当光斑尺寸较大时,物体的散射光强度较小,探测器接收到的混频信号较弱,最终导致信号处理模块测量误差较大甚至无法探测到信号[5~7]。为了解决上述问题,本文提出一种米级距离聚焦系统的设计,使激光在米级距离一定的景深范围实现汇集,以提高待测物体表面的光能量密度,有效提升信号的信噪比。
2 高斯光束
要控制激光束首先要了解它的光学特征。激光属于高斯光束,其光场分布如图1所示[8,9]。
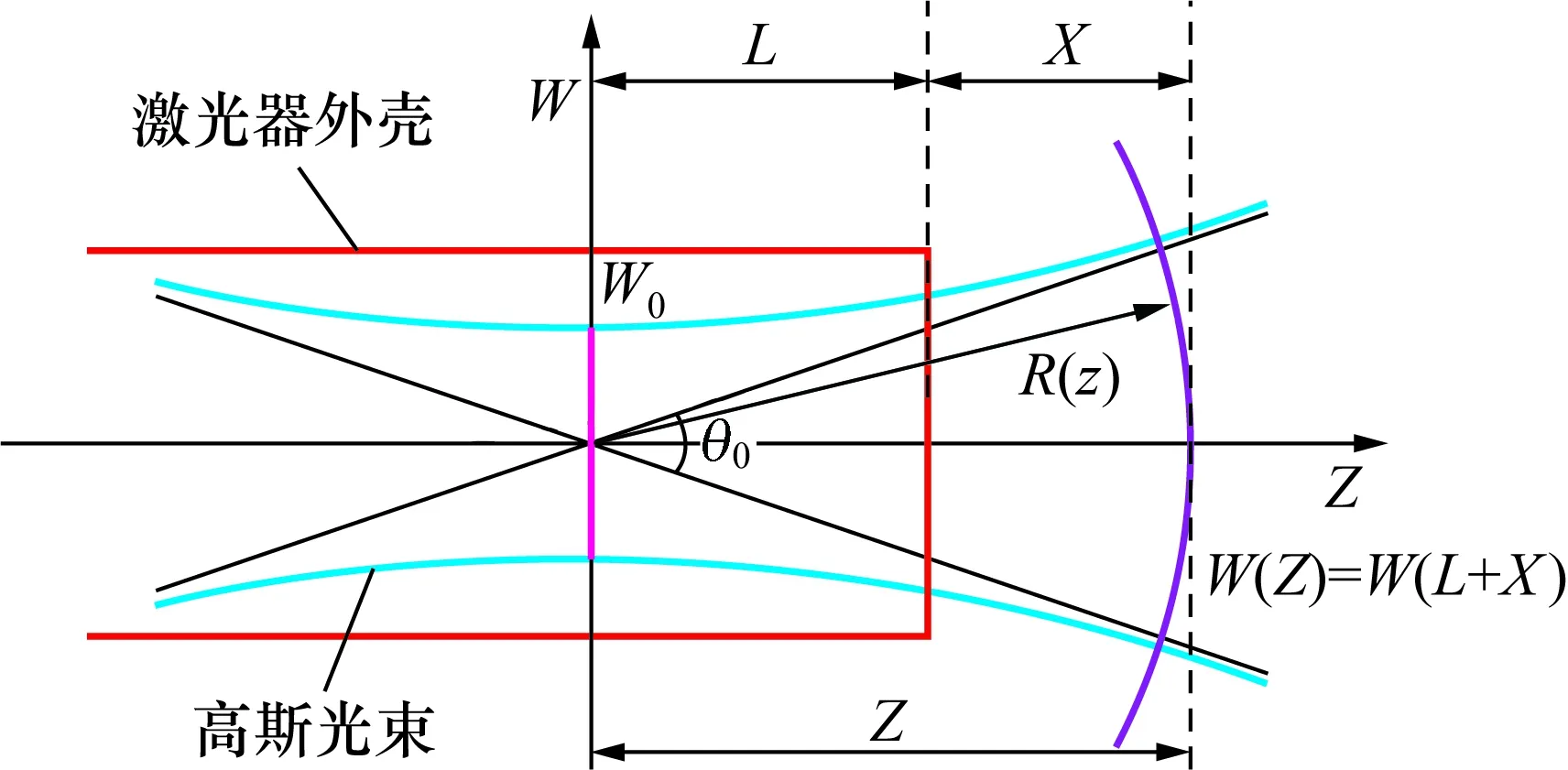
图1 高斯光束光场分布Fig.1 Light field distribution of Gaussian beam
图1中,R(Z)是坐标Z处等相面曲率半径,W(Z)为坐标Z处光斑的半径,W0为束腰的腰斑半径,L为束腰到激光出射口的距离,X为光斑到激光出射口的距离。由激光原理可知[10],腰斑半径W0和束腰位置L可以唯一地表征一个高斯光束。
本文采用CCD法[11~13]来测量高斯光束的2项参数。所谓CCD法是通过CCD相机来测量不同位置处的光斑半径,通过光斑半径W(L+X)与位置X的关系推算腰斑半径W0和束腰位置L。
=P1X2+P2X+P3
(1)
式中:λ为光束的波长;P1,P2,P3分别为二次、一次项系数与常数项。由此,可以得到:
(2)
(3)
通过确定腰斑半径W0和束腰位置L两项参数,可以确定出射激光的光学性质;再根据出射激光的光学性质,控制激光在米级距离处的光斑尺寸。
3 定焦系统设计
激光束具有一定的发散角,如果不施加任何聚焦措施,在中远处光斑半径会大于设定阈值A,无法得到有效的激光多普勒信号。为了在米级距离处实现光斑半径小于A的目的,通常采用望远镜系统对光束进行聚焦。图2为望远镜系统光路结构图[14~16]。

图2 望远镜系统光路结构Fig.2 Optical structure of telescope system
图2中W0为出射激光的腰斑半径,W(Z1),W(Z2)分别为米级距离处激光腰斑半径,FA,FB分别为透镜A、B的焦距,La,Lb,Lc,Ld,Le为自由空间各点位置,L为束腰与激光出射口之间的距离。将W0作为原探测激光光束的腰斑半径,控制激光在米级距离处一定景深范围内汇集,即控制Z1,Z2两处的激光光斑半径W(Z1),W(Z2)小于阈值A。
为了计算W(Z1),W(Z2),引入参数q来表征激光的光场特性。将参数q与光学元件的傍轴光线传输矩阵相结合,可以很方便地描述高斯光束的传输特性。q的定义式为:
(4)
式中R为球面波的曲率半径。如果已知光场Z处的参数q,Z处的光斑半径W(Z)为:
(5)
以求W(Z1)为例,Z1处光束的参数q由式(6)得到:
q(Z1)=Lc×FB×Lb×FA×La×q0
(6)
得知q(Z1)后,通过式(5)可以求出W(Z1)。由式(6)可知,W(Z1)由W0,La,Lb,FA,FB这5个参数决定。考虑到器件的小型化和透镜A需要在激光器外部,La、Lb需要满足限制条件:
La+Lb+L≤D
La≥L
式中:D为能够接受的定焦系统最大尺寸;L由式(3)可知。由于实际条件的限制,透镜A、B只能选取市面上常见的产品,所以FA、FB采用厂家提供的参数。在以上限制条件下,为了实现W(Z1)、W(Z2)小于阈值A的目标,穷举La,Lb,FA,FB中所有的值,将满足条件的La,Lb,FA,FB值记录下来,根据安装过程中的实际条件选取其中1组数据。
4 实验验证
通过两部分实验进行验证,实验1目的为求取原出射激光腰斑半径W0和束腰位置L。实验2目的为确定满足条件的La,Lb,FA,FB值。
4.1 实验1
本实验将激光测速仪出射的激光作为实验对象,采用Thorlabs相机式光束质量分析仪作为探测光斑直径的工具。此光束分析仪包含有1个高质量的12位CCD相机,该相机配备有1块8.77 mm×6.6 mm无窗传感器芯片,像素分辨率可达1.40兆,可以自动分析光斑直径。
表1为在距离激光器出射口不同的探测位置X处测量得到有效光斑直径的部分实验数据。采用式(1)中函数拟合的方法,计算得到W0=0.5226 mm,L=138 mm。
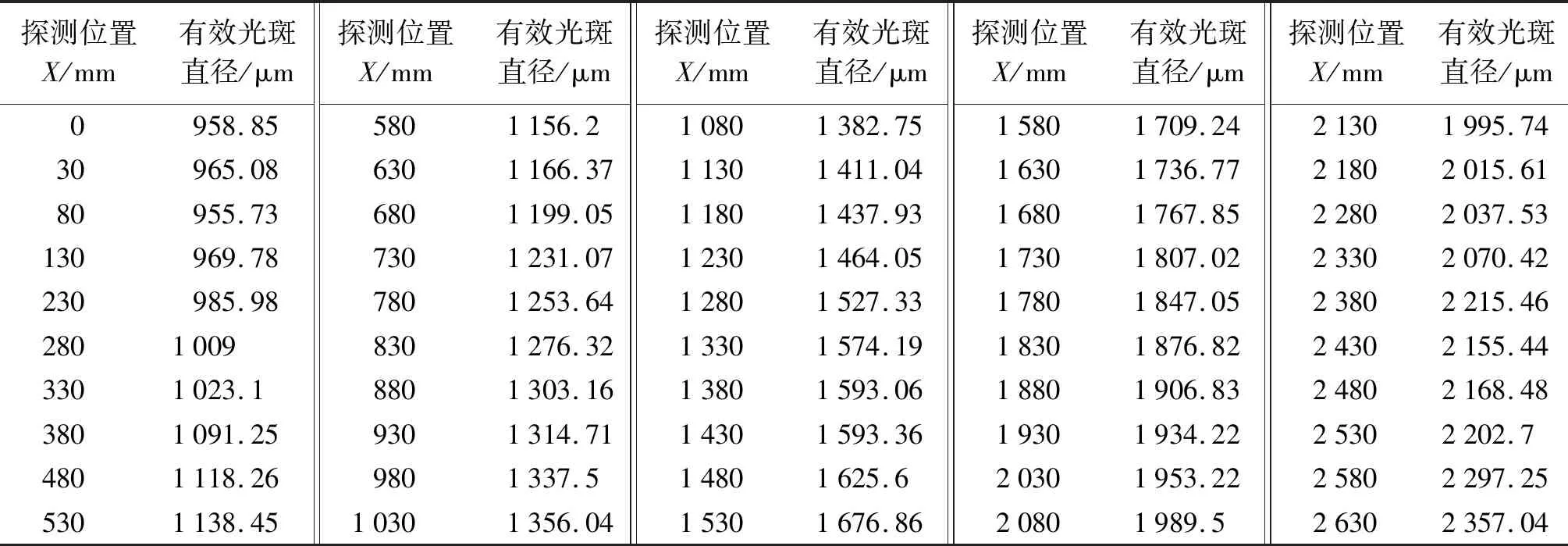
表1 不同探测位置的有效光斑直径Tab.1 Effective spot diameter of different detection positions
4.2 实验2
此实验利用MATLAB穷举La,Lb,FA,FB中所有数值,当W(Z1),W(Z2)同时小于阈值A时,记录数值。实验中取A为1.6 mm,定焦系统最大尺寸D为100 mm,Lc,Ld分别为4.5 m和5.5 m,FA,FB选取大恒光电公司提供的现有透镜数据。
MATLAB计算定焦系统各项参数见表2,其中第1列为定焦系统长度LD=La+Lb-L。考虑到器件小型化的要求,选取透镜A、B的焦距参数分别为-9.8 mm,60 mm。透镜A、B间Lb为51 mm,透镜A与激光出射口间距为La-L=2 mm。将以上参数应用到定焦系统中,使用光束分析仪在距离激光测距仪4.5 m或5.5 m处测量光斑半径,光斑半径均达到要求;激光多普勒信号明显,测速功能得以实现。
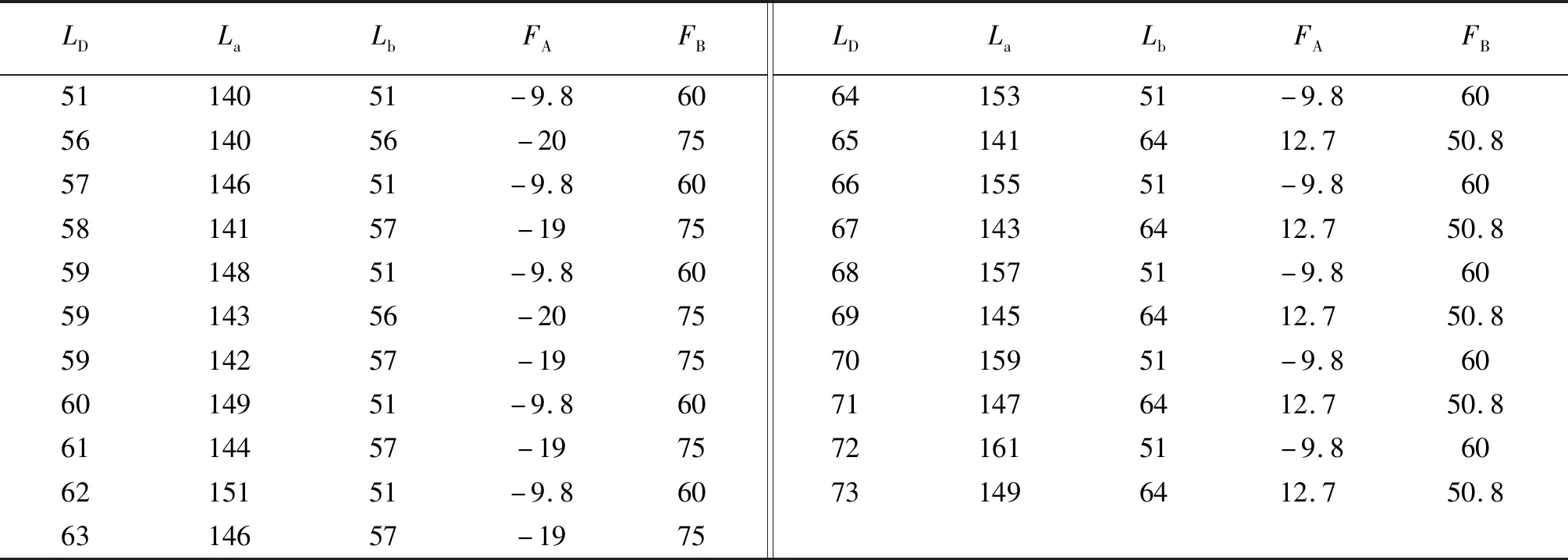
表2 定焦系统各项参数Tab.2 Parameters of focusing system mm
5 结 论
为了实现激光测速仪在米级距离的有效测量,本文提出一种激光测速仪定焦系统。通过实验验证,激光通过定焦系统后,在4.5 m或5.5 m处的光斑半径小于0.6 mm,达到实验要求。本定焦系统可控制米级距离处激光的光斑半径,提高了探测信号的性噪比,有效增强了激光测速仪米级距离的测速能力。
