永磁无刷直流电动机位置传感器精度对脉动转矩抑制效果的影响研究
2021-06-04朱高林肖遥剑
朱高林,肖遥剑,赵 浩,冯 浩
(1.杭州电子科技大学,浙江 杭州 310018;2.嘉兴学院,浙江 嘉兴 314001)
1 引 言
永磁无刷直流电动机具有控制简单、功率密度大、运行效率高等优点,广泛应用于汽车、工业控制、自动化、以及航空航天等领域[1~3]。但永磁无刷直流电机运行时存在较为明显的脉动转矩[4]。引起脉动转矩的原因主要包括换相、非理想反电动势、齿槽效应等几种,其中由换相产生的脉动转矩占主要成分。永磁无刷直流电动机的换相由位置传感器的反馈信号控制,目前常用的永磁无刷直流电动机大部分采用霍尔传感器来作为电机的位置传感器[5],在实验中发现,由于安装位置不准确,3个霍尔元件的位置反馈并不能精确实现相位互差120°电角度,并且霍尔元件对磁场感应的灵敏度具有离散性,文献[6]中实验证明在霍尔位置传感器输出电平跳变时很容易发生波动产生误差,进一步影响电流换相形成不对称的非正弦的脉动转矩波形。文献[7~9]分别对霍尔传感器进行故障检测和信号校正、故障补偿以及补偿预估的转子位置估算方法来实现传感器的优化,在一定程度上提升了传感器位置反馈的精度。
肖遥剑等[10~12]提出了一种基于峰谷互补的永磁无刷直流电机脉动转矩抑制方法,抑制效果与2台电机脉动转矩波形的对称性和正弦性密切相关。相比霍尔传感器,光栅传感器具有更为良好的输出特性和响应速度,因此,本文以霍尔传感器和光栅传感器为对象,通过实验测定了电动机在2种位置传感器工况下脉动转矩的对称性和正弦性,并对比了2种工况运行时电机脉动转矩的抑制效果。
2 脉动转矩对称性和正弦性抑制效果
2.1 峰谷互补抑制方法
理想的脉动转矩波形为正弦波,峰谷互补方法是用2个参数型号相同的永磁无刷直流电动机同轴相连,如图1所示。2台电机绕组错开一定角度,产生2个相位相差为180°电角度的脉动转矩,并相互叠加抵消的方法,如图2所示。

图1 脉动转矩抑制实验原理框图Fig.1 Block diagram of pulsating torque suppression experiment
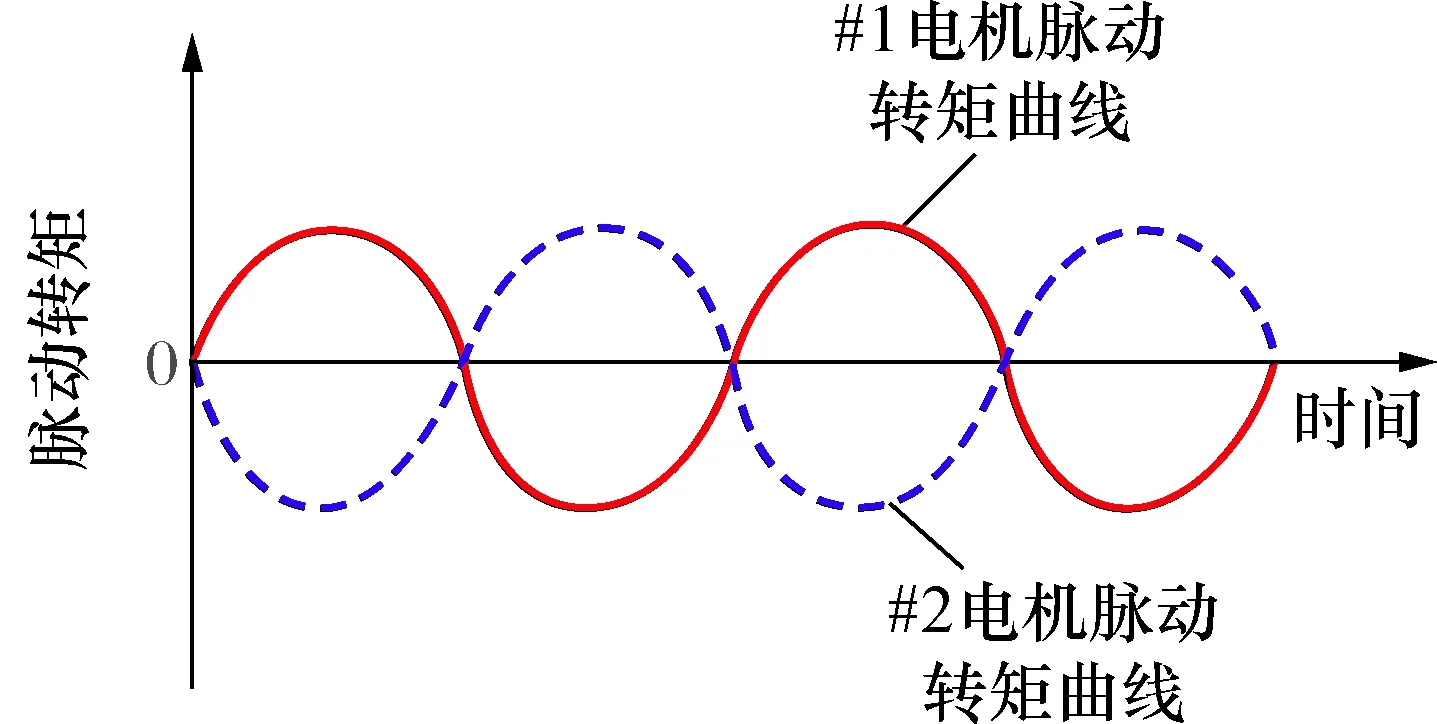
图2 峰谷互补原理Fig.2 The complementation principle of peaks and valleys
2.2 脉动转矩对称性和正弦性对抑制效果的影响
理想条件下,2个电机本体和驱动电路参数如果相同,即可实现脉动转矩的完全抵消,如图2所示。电机在实际工况运行时,由于位置传感器的精度问题,非理想的换相会引起脉动转矩波形的不对称和非正弦性,不能实现理论上的抑制效果,因此,控制电机换相的位置传感器的输出特性和响应速度显得尤为重要。
3 2种位置传感器精度对比
3.1 霍尔传感器与光栅传感器
霍尔传感器是一种磁敏式传感器,通过霍尔效应检测磁感应强度的变化实现电平转换来反馈位置。光栅传感器是通过光电开关的通断来反馈位置,每个光电开关包含一个红外发光二极管和一个光敏三极管,通过固定在转子上的光栅遮光盘实现不断地导通和关断。
3.2 2种传感器测量准确度对比
由于传感器的精度决定了换相位置的准确性,进一步决定了脉动转矩波形的对称性和正弦性。因此,通过实验来研究2种位置传感器的输出特性。
首先对传感器输出波形的相位差进行对比研究,相位差对脉动转矩的对称性的影响很大,理想情况下3个输出波形两两相差120°电角度,实际通过示波器测量的2种位置传感器相位差波形如图3所示。

图3 位置传感器输出波形相位差Fig.3 The phase difference of position sensor output waveform
由图3可知,光栅传感器输出波形的相位差分别为120.6°、-119.1°、120.5°,霍尔式传感器输出波形的相位差为116.0°、-126.4°、118.0°。光栅传感器的三相相位差比霍尔位置传感器的相位差要小很多,在位置定位方面光栅位置传感器的效果更好。
位置传感器检测位置信号时的响应速度的快慢也是影响换相时间的关键因素之一,当响应速度快时,控制器接受到反馈信号可以更快地驱动电机换相,这样就能实现换相延迟更小,可以通过实验测量2种传感器工作情况下上升时间即上升斜率的变化情况来判断。2种传感器输出波形的上升时间图如图4所示。

图4 位置传感器三相上升时间Fig.4 The rise time of position sensor three-phase
从图4中可以看到示波器分别测量的光栅传感器光电开关管和霍尔元件导通时的上升时间值,3个光电开关管上升时间分别为2.844 μs、2.954 μs、3.067 μs较霍尔元件的20.32 μs、24.73 μs、15.08 μs短了很多,并且光栅位置传感器的每个元件响应时间近似,而霍尔位置传感器的元件的响应时间较长并且两两间相差较大,由于感应元件的每次响应都对应着枢绕组一次电换相,因此光栅位置传感器较霍尔位置传感器换相响应速度更快、换相时间更稳定、脉动转矩波形更为对称,正弦性更好。
另一个影响电机换相的是输出波形的占空比,因为控制器通过位置电信号的逻辑变换来实现电机换相,传感器输出各相波形的占空比如图5所示。
由图5可知,光栅传感器输出波形的占空比分别为49.76%、49.73%、50.20%与霍尔传感器的49.76%、50.48%、49.97%的占空比值相接近,然而在电机加速和减速过程中,由于霍尔元件响应时间较长会导致占空比发生波动,而光栅位置传感器的遮光盘的透光弧可以通过改变弧度来实现元件占空比值的变化,可以通过多次测试来找出最佳角度,保证占空比约为50%。

图5 位置传感器三相占空比Fig.5 The duty cycle of position sensor three-phase
4 位置传感器电机脉动转矩抑制实验
4.1 实验平台搭建
为了在峰谷互补的理论上进行实验来研究光栅位置传感器较霍尔位置传感器传感器的电机脉动转矩抑制效果的改善性,构建永磁无刷直流电动机的实验测量平台,如图6所示。
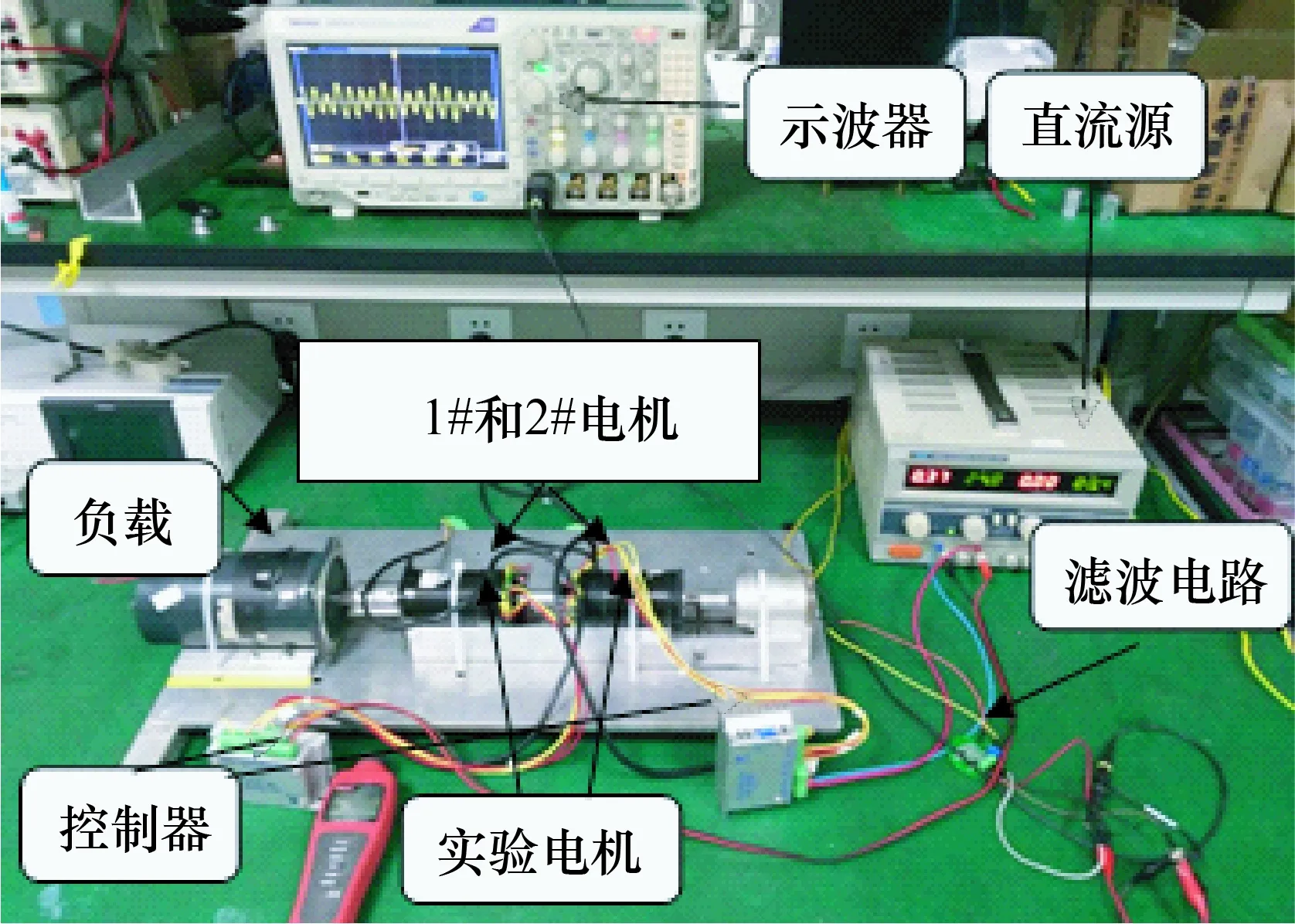
图6 抑制脉动转矩实验平台Fig.6 Suppression of pulsating torque experimental platform
将1#和2#2个同规格的永磁无刷直流电动机同轴相连,然后将电动机转轴与文献[13~15]所提到的旋转角加速度传感器和负载相连,滤波后输出脉动转矩波形。
4.2 实验结果与分析
步骤1:在光栅传感器工作下,2台永磁无刷直流电动机分别拖动同一负载,转速为1 300 r/min时,分别测量出2台电机的脉动转矩波形,如图7(a)、图8(a)所示。在同样的实验步骤下测量出霍尔位置传感器工作时2台电动机的脉动转矩波形,分别如图7(b)、图8(b)所示。
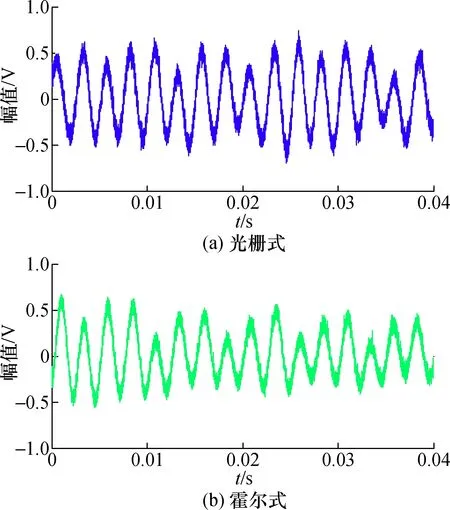
图7 1 300 r/min时1#电动机脉动转矩波形图Fig.7 1# motor ripple torque waveform when speed is 1 300 r/min
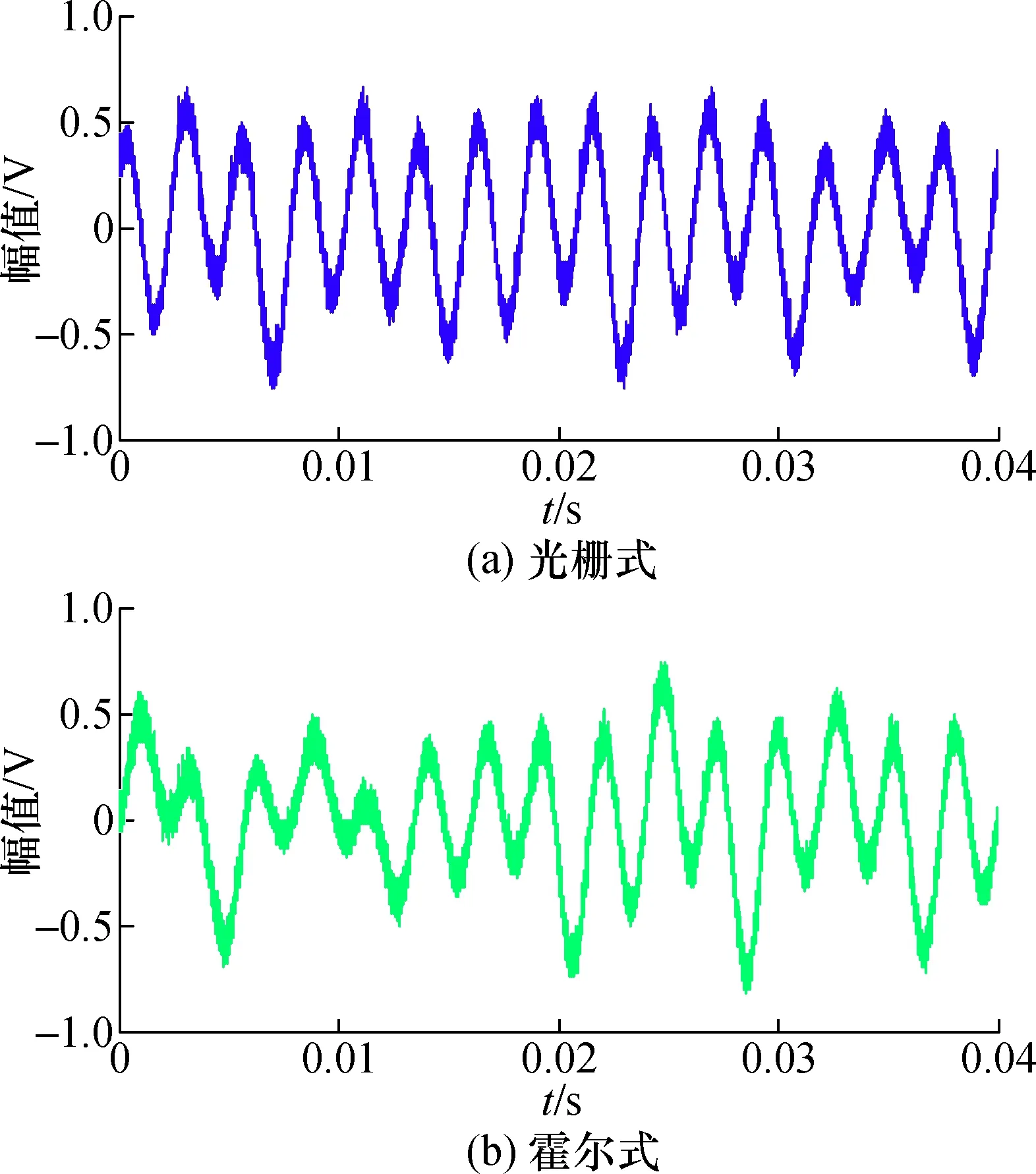
图8 1 300 r/min时2#电动机脉动转矩波形图Fig.8 2# motor ripple torque waveform when speed is 1 300 r/min
步骤2:2台永磁无刷直流电动机同轴运行,负载转矩增加到原负载的2倍,转速为1 300 r/min,2台电动机同轴时的工作电流比与2台电动机单独工作时的电流比相同。调节2台电机在圆周上的相对位置时,需要观察脉动转矩的波形,幅值最小时即为2组电机绕组相差15°电角度、2组脉动转矩波形相位差180°电角度的相对位置。此时固定2台电动机,分别测量光栅式和霍尔式传感器工况运形下,脉动转矩抑制波形图并进行频谱分析。其中光栅式工作下的波形图如图9(a)所示,频谱图如图10(a)所示,霍尔式工作下的波形图如图9(b)所示,频谱图如图10(b)所示。
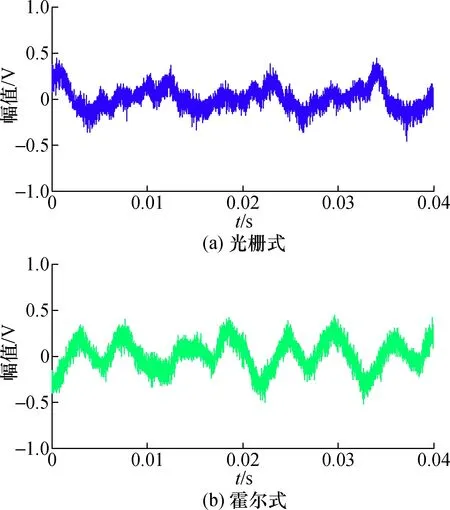
图9 1 300 r/min时2台电动机的脉动转矩抑制波形图Fig.9 Pulsating torque suppression waveform diagram of two motors when speed is 1 300 r/min
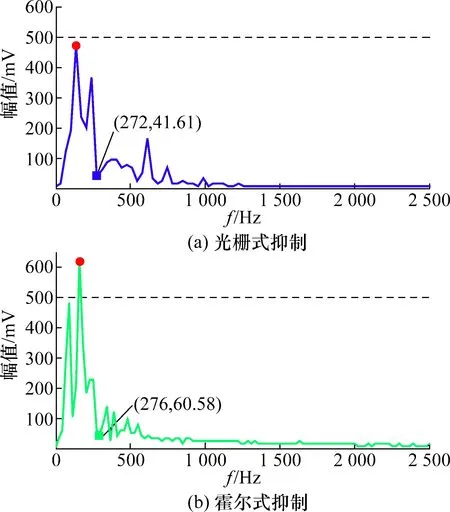
图10 1 300 r/min时2台电动机的脉动转矩抑制波形频谱Fig.10 Pulsating torque suppression waveform spectrum of two motors when speed is 1 300 r/min
步骤3:为了保证实验的准确性和研究的严谨性,调节电机负载,改变系统转速,观察电机在其它工作点时的脉动转矩波形和抑制效果。保持2台电机固定位置,将转速调整到另一个数值(2 040 r/min)重复步骤1,测量出光栅式位置传感器下1#电机的脉动转矩波形如图11(a)所示,2#电机如图12(a)所示。在同样参数下测量出霍尔位置传感器下1#电机脉动转矩波形图如图11(b)所示,2#电机如图12(b)。与步骤2类似,保持电机转速在2 040 r/min,2台电动机同轴相连并且接负载,负载依旧为原负载的2倍,测量出抑制后的脉动转矩波形,光栅位置传感器工作下的抑制结果图如图13(a)所示,频谱分析图如图14(a)所示,霍尔位置传感器工作下的抑制结果图如图13(b)所示,频谱分析图如图14(b)所示。

图11 2 040 r/min时1#电动机脉动转矩波形Fig.11 Pulsating torque suppression waveform diagram of two motors when speed is 2 040 r/min

图12 2 040 r/min时2#电动机脉动转矩波形Fig.12 Pulsating torque suppression waveform spectrum of two motors when speed is 2 040 r/min
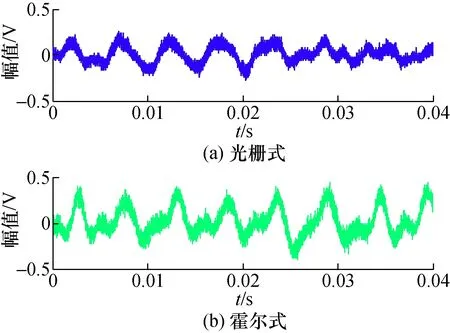
图13 2 040 r/min时2台电动机脉动转矩抑制波形Fig.13 Pulsating torque suppression waveform diagram of two motors when speed is 1 300 r/min
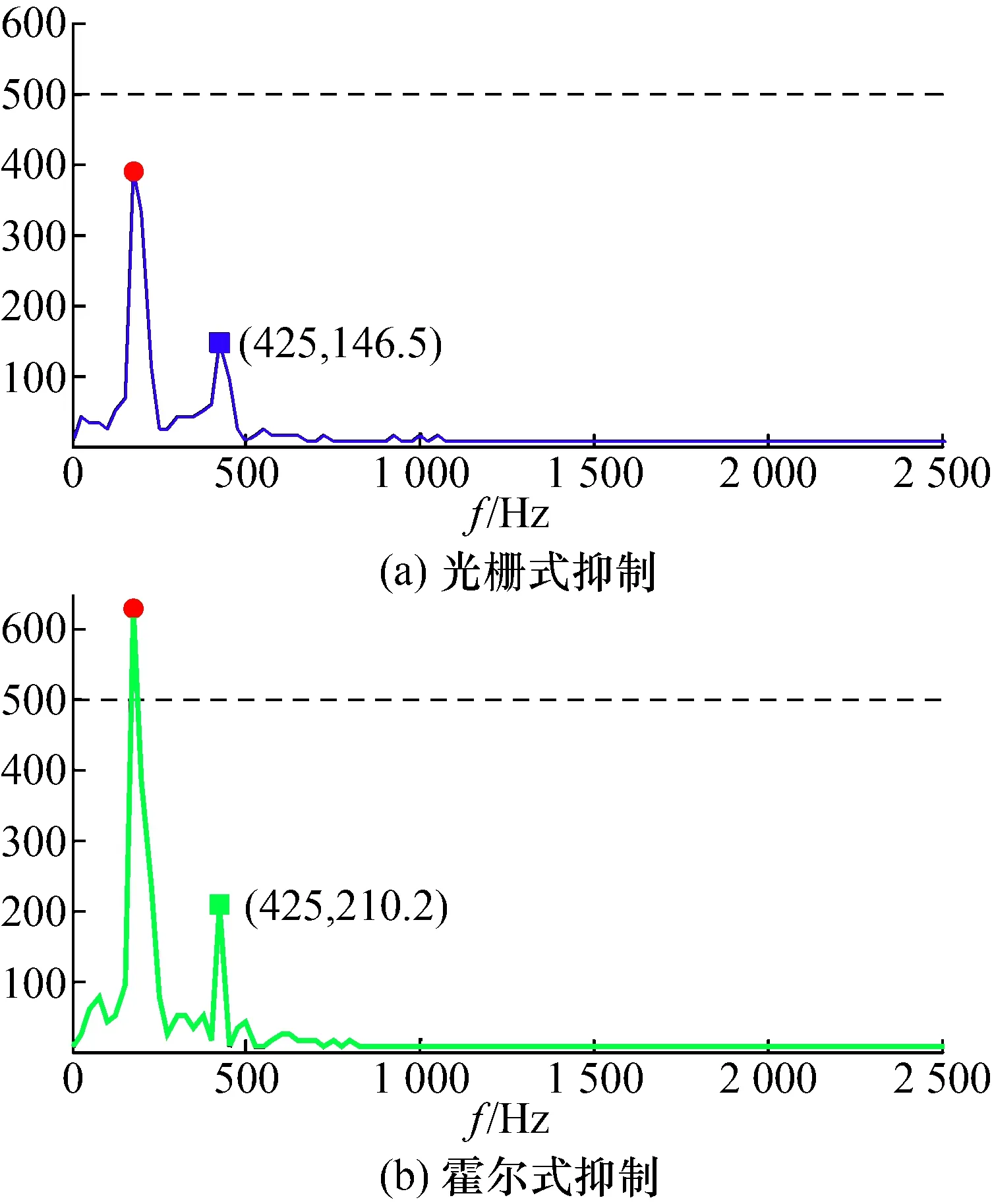
图14 2 040 r/min时脉动转矩抑制波形频谱Fig.14 Pulsating torque suppression waveform spectrum of two motors when speed is 2 040 r/min
由2种转速下的脉动转矩波形和抑制波形可知,光栅式传感器运行时电动机的脉动转矩正弦性和对称性更好,且抑制之后的脉动转矩更小。实验所用电机为四极电机,工作模式为三相十二状态,频率为电机频率的12倍频,在频谱分析中取相同转速时频率如标记黑点所示,通过对比可以看出相同转速下光栅位置传感器下脉动转矩幅值更小也佐证上述分析。以上实验验证了位置传感器对换相精度及对脉动转矩对称性和正弦性有很大的影响,且光栅位置传感器较霍尔位置传感器,电机的脉动转矩抑制效果更优。
5 结 论
本文从二种常用位置传感器的特性出发研究了位置传感器对换相精度及对脉动转矩对称性和正弦性的影响,通过实验来对比分析2种位置传感器的精度差异,进一步通过脉动转矩抑制实验验证了光栅位置传感器下脉动转矩波形的改善性并且提高了抑制效果。其它位置传感器的改善性是否更好有待下一步的深入研究。
