十臂锚杆钻车的研制与应用
2021-06-04王威
王威
(1.中国煤炭科工集团太原研究院有限公司, 山西 太原 030006;2.山西天地煤机 装备有限公司, 山西 太原 030006)
0 引言
煤炭是我国最重要的能源之一,由于采掘设备的限制,现阶段煤炭开采尚处在较低的层面,亟需开发一种高效开采掘进系统[1]。现有的开采工艺一般是掘进机配套锚杆钻车进行采掘,两者交替工作,掘进机开采一段距离后退出该掘进头,随后锚杆钻车进入刚掘进的区域内进行锚杆支护。这种掘进工艺存在两方面的弊端:一是掘进机切换巷道时整机的调机时间过长,降低了巷道的成巷效率;二是掘进机比较笨重,行动时存在多项安全隐患,同时增加了操作人员的劳动强度。因此需要研制一种新型的锚杆钻车,使其能够配套掘进机和掘锚机组进行巷道掘进,缩短不必要的调机时间,降低操作人员的劳动强度,同时提高巷道的掘进速度,缩短巷道的成巷时间。顶板条件好且断面较大的巷道一般都选用掘锚机组进行巷道掘进,为了提高巷道的掘进速度,将采掘和支护分开,掘锚机组负责巷道掘进需开发一种新型锚杆支护设备,该设备能够覆盖整个巷道断面。根据巷道的具体情况,开发出一种新型十臂锚杆钻车。
1 高效快速掘进系统
十臂锚杆钻车的开发设计主要是为了配套掘锚机组实现掘进巷道的高效快速掘进,其中掘锚机组负责进行巷道的掘进,十臂锚杆钻车主要负责进行巷道的锚杆支护,同时配套弯曲胶带转载机组进行物料的转载和运输。十臂锚杆钻车的开发设计主要依据巷道的锚杆支护情况和支护数量[2]。中国煤炭科工集团太原研究院有限公司与神东煤炭集团联合开发了一种新型的高效快速掘进系统,并准备在神东煤炭集团大柳塔煤矿进行使用。神东煤炭集团大柳塔煤矿5-2煤层中的52501、52502工作面中巷道顶锚的支护数量为6根2 200 mm长的金属锚杆,侧锚为1 800 mm的玻璃钢锚杆,因此在进行整机设计时需要充分考虑实际支护情况。十臂锚杆钻车在快掘系统中主要负责进行全部锚杆支护,而掘锚机组负责进行巷道的截割,为了发挥掘锚机组的最大截割能力,需要十臂锚杆钻车完成全部巷道中的锚杆支护,因此考虑将锚杆钻车设计为6台顶锚杆钻机和4台侧帮锚杆钻机,整机能够同时完成10个锚杆支护。整套系统需要同时进行物料的转载运输,具备不间断运输的特点和运能大的优势,而传统的带式转载机和梭车都无法满足高效快速掘进系统中的运输能力要求,需要开发一种新型的带式转载机,具备不间断连续运输和自适应的拐弯能力,因此整套系统中配备的带式转载机为弯曲胶带转载机[3],见图1。

1-掘锚机组; 2-十臂锚杆钻车; 3-可弯曲胶带转载机;4-迈步式自移机尾。图1 快速掘进系统结构
2 十臂锚杆钻车的研制
十臂锚杆钻车在设计初期借鉴现有锚杆钻车的设计理念,在整机的前侧布置尽量多的锚杆钻机,但受到巷道宽度的限制,在整机的前端布置4台顶锚杆钻机,由于巷道一次需要支护完成6根顶锚杆,因此整机采用分段式设计,距离第一排顶锚杆2 m的间距布置两台顶锚杆钻机,采用分段支护的方式能够一次性完成全部顶锚杆支护,缩短支护时间,提高巷道的掘进截割速度[5]。受到整机布置的限制,在前端的4台顶锚杆钻机具备左右滑移和前后摆动的功能,而靠后的两台钻机采用定点支护的方式固定,其具备左右摆动的功能。钻机全部采用新型的电液控制操作系统,能够实现远程遥控操作和一键启动功能,降低现场操作人员的劳动强度,提高操作舒适性,为后续实现锚钻系统的整体自动化提供技术支持和技术储备。
整机不仅需要具备顶锚支护的功能,在巷道掘进过程中还需要同时进行巷道侧帮锚杆支护,但是由于整机的布置方式和支护速度,无法实现四臂锚杆钻车中顶锚钻机同时进行顶板锚杆支护和侧帮锚杆支护,因此在十臂锚杆钻车中还布置有4台侧帮锚杆钻机负责侧帮锚杆支护。4台钻机采用两两布置的方式布置在整机的尾端,且侧帮钻机与前侧和中侧顶锚钻机的间距都为整数倍,可以更好地实现煤矿锚杆支护的标准化设计。
高效快速掘进系统可实现掘、支、运平行作业,其中十臂锚杆钻车在进行巷道的锚杆支护时,掘锚机能够进行巷道的截割,且十臂锚杆钻车在进行锚杆支护时无法移动,需要给掘锚机组配套一种能够实现移动的带式转载机,能够在分段式锚杆机中移动,两者间通过销齿机构驱动实现前进或后退,保证两者间既可实现独立运动,同时也能够同步前进和后退。整套高效快速掘进系统中,掘锚机负责巷道截割和牵引带式转载机前进,十臂锚杆钻车负责巷道的锚杆支护,带式转载机则负责将掘锚机组截割下来的物料转运至巷道中的主带式输送机上,提高了巷道的掘进速度,实现了掘、支、运平行作业。

1-顶锚钻机; 2-工作台; 3-泵站; 4-底盘; 5-侧帮钻机;6-除尘系统; 7-附件; 8-除尘风筒。图2 十臂锚杆钻车的组成
3 十臂锚杆钻车的应用
神东煤炭集团大柳塔煤矿的煤层赋存近水平分布,局部呈现宽缓的波状起伏,掘进过程中煤层裂隙较发育,易片帮冒顶。因此巷道支护时均采用“冷拔丝网+圆钢锚杆+锚索”的方式进行联合支护,通过上分层巷道时采用“锚杆+冷拔丝网+U29钢棚”进行联合支护。顺槽正帮采用“塑料网+玻璃钢锚杆”的方式进行支护,副帮采用“冷拔丝网+圆钢锚杆”的方式进行支护。
巷道施工时,山特维克MB670/241型掘锚机负责掘进,巷道一次成形。十臂锚杆钻车在掘锚机组之后负责进行巷道的锚杆支护,能够同时完成6根顶锚杆和4根侧帮锚杆支护,且10台钻机能够同时进行锚杆支护且互不干扰,只需5~6 min即可完成整个巷道的锚杆支护,缩短了巷道的支护时间,提高了巷道的成巷速度,且掘进过程中产生的物料通过布置在十臂锚杆钻车底部的可弯曲胶带转载机转运至主带式输送机上运至煤仓。整套高效快速掘进系统在巷道掘进过程中能够实现掘、支、运平行作业,快速掘进系统自应用以来,单班最高进尺85 m,日最高进尺158 m,月最高进尺3 088 m,创造了当时大断面单巷掘进的世界记录,首次实现煤矿井下掘进工作面的综合掘进机械化。
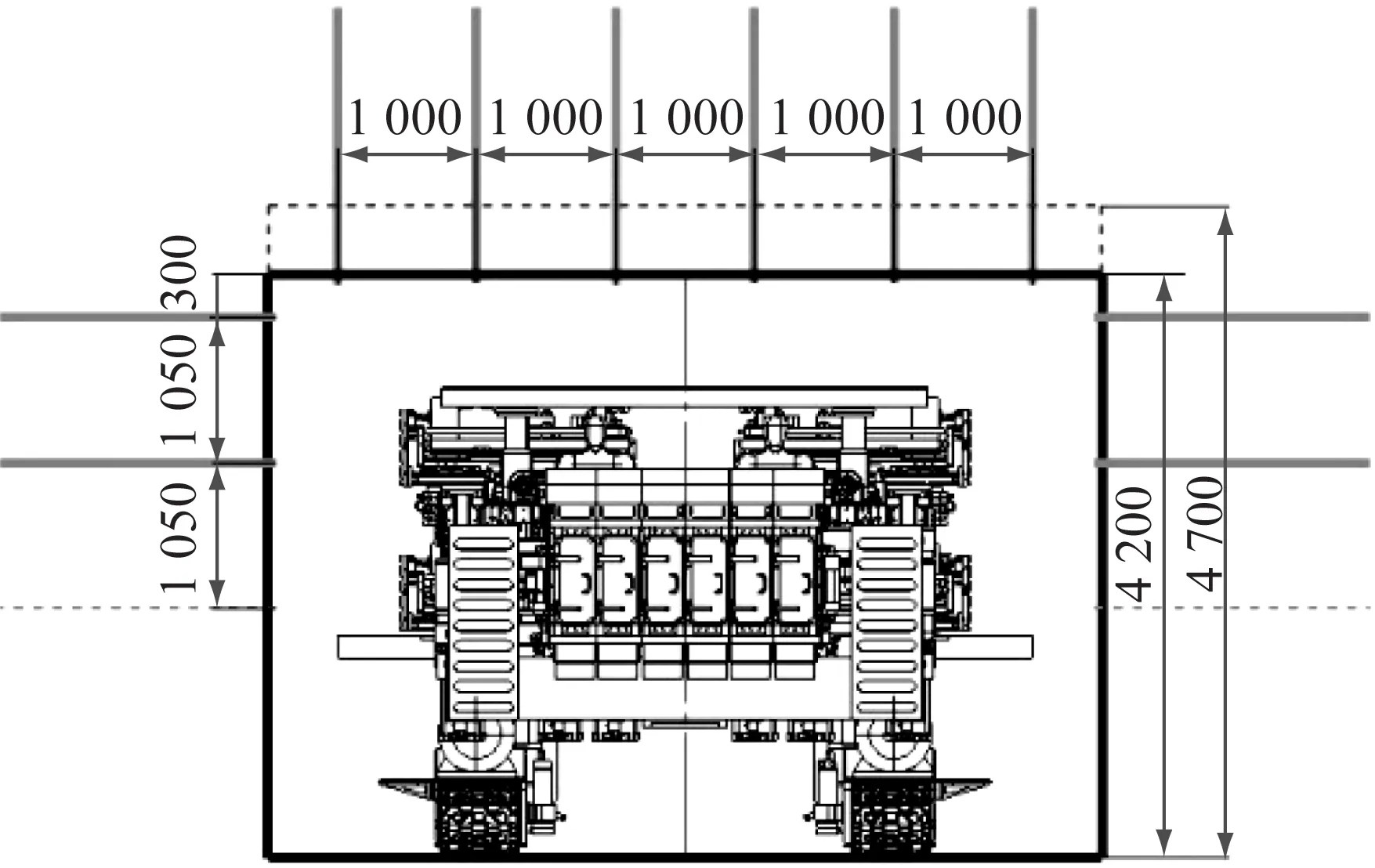
图3 十臂锚杆钻车支护
4 结论
十臂锚杆钻车是整套高效快速掘进系统中关键的设备之一,该设备的研制根本上解决了现阶段掘进巷道的掘、支、运不能够平行作业的问题,同时依靠系统中各个设备之间的协同控制和信息化联动,实现整套系统的机械化、自动化和信息化联动控制,解决现阶段采掘失调的矛盾[6]。
十臂锚杆钻车为实现快速掘进系统中不可缺少的设备之一,整机采用分段式钻机的布置方式和跨骑式的履带行走机构,是针对该套快速掘进系统而开发的一种新型结构,同时在分段式锚杆钻机还使用了新型的电液控制阀组,实现锚钻系统的自动化操作,进一步降低操作人员的劳动强度,改善操作人员的劳动强度,提高巷道的支护速度,同时为下一步全自动锚杆支护提供技术支撑和技术储备,为后续的全自动锚杆支护技术和智能锚护技术解决了基础问题,同时在研究过程中对围岩状态的实时监测和锚杆支护位置的研究同步进行,为后续实现掘进工作面的无人化和自动化提供技术支撑,实现掘进工作面的无人化。
