人体腿部运动俘能系统的设计*
2021-06-04
(西安工程大学 西安 710048)
1 引言
智能纺织品拥有传统纺织品特征,同时兼具感应、监视和信息处理等功能的新型纺织品,主要由传感、执行、控制和电源等模块组成,在休闲娱乐、军事、医疗、航空、航天等方面具有广阔的应用前景[1]。然而,目前智能纺织品主要依赖充电宝等外部电源进行供电,这种方式存在不易携带、具有一定的危险性,且电量耗尽后不能及时充电等问题[2]。因此,自供电电源成为该领域的热点研究问题。智能纺织品以传统服装为载体,与人体紧密贴合,人体产生的能量可作为自供电电源的能量来源。目前人体能量俘获方式主要有电磁式[3~5]、静电式[6~7]和压电式[8~12]。其中压电式人体能量俘获方式具有装置结构简单、能量转换密度大、易于加工制作等优点成为人体能量的主要俘获方式。当人体进行日常生理活动时,腿部动作具有规律性且变形较大,又易与纺织品集成,所以腿部能量是自供电电源的理想能量来源。但目前压电式腿部俘能装置存在的问题是俘能器结构比较单一,常见的悬臂梁[13]、双稳态[14]等结构不能承受形变较大的腿部弯曲运动,且能量收集电路的采集效率较低、电路能量损耗较高[15]。
基于此,本文提出基于压电式俘能技术和人体腿部运动相结合的面向智能纺织品自供电电源的能量俘获方法,从人体腿部运动姿态规律出发,建立人体腿部运动简化机构的模型,设计出适合腿部运动的压电俘能器和能量收集电路,并通过搭建的腿部俘能装置完成对腿部能量的收集与存储,为人体能量收集的实际应用提供了一种新途径,同时为智能纺织品的持续性供电奠定基础。
2 建立人体腿部运动模型
为了在实验中解放人力,有效控制其他外界条件对实验结果的影响,对人体腿部运动姿态规律进行分析,构建出模拟人体腿部运动简化模型。
构建模拟人体腿部运动模型首先需要对人体腿部运动姿态规律进行分析。选择受试对象身高175cm,体重72kg,行走速度5km/h,跑步速度约8km/h(行走频率约为1.4Hz,跑步频率约为2.2Hz),受试对象腿部运动三个时间节点的运动姿态如图1所示。

图1 人体腿部运动姿态
图1(a)为受试对象行走时的运动姿态,以一条腿为研究对象,从图中可以看出,人体行走一个周期的过程可以分为站立和摆动两个阶段。站立时单足站立,足跟抬起离地,人体向前移动;摆动时,足底完全脱离地面,向前作加速运动,膝关节弯曲,防止足部接触地面,此时膝关节弯曲程度达到最大,弯曲夹角为91°±10°,最后腿部向前摆动,直至足部再次接触地面。图1(b)为受试对象跑步时的运动姿态,腿部的摆动过程与行走时类似,相对于行走,跑步时腿部的弯曲程度更大,弯曲夹角为68°±10°。
通过对人体腿部运动姿态分析,将人体腿部运动简化为一平面四杆机构,建立人体腿部运动简化模型,如图2所示。铰链A为人体膝盖处,铰链D为能量输入端(电机),将小腿固定在机架上,利用输入端的电机转动带动大腿进行弯曲,通过控制电机的转速和转角实现运动频率和腿部弯曲夹角控制。

图2 人体腿部运动模型
3 压电俘能技术原理
压电俘能技术的基本原理是将人体运动产生的能量,通过特定材料的正压电效应转化为可供电子器件使用的电能。其中正压电效应是指当压电晶体受到外机械力作用时,晶粒的形状会发生变化,致使内部出现电荷不对称分布的现象,从而在其表面产生符号相反的电荷,如图3所示。

图3 正压电效应原理示意图
4 压电式人体腿部运动俘能系统
压电俘能系统主要由压电俘能器和压电能量收集电路组成。在整个系统中,人体腿部运动驱动压电俘能器屈曲变形,压电俘能器因正压电效应从而产生电荷,然后压电能量采集电路会将压电俘能器产生的交流电整流成直流电,利用压电电源管理电路进行调压和稳压处理,最后再利用储能元件完成对能量存储。
4.1 压电式人体腿部俘能器设计
当压电薄膜产生机械形变时,所受的应力以及产生电场的关系可用第一类压电方程表示:

其中,S为应变,D为电位移,T为应力,E为电场,sE和εT分别表示电场强度恒定时的弹性柔顺系数和应力恒定时的介电常数,d为压电常数,dt为d的转置。式(1)为正压电效应,式(2)为逆压电效应。假设应力与应变之间为线性关系,总感应电荷可以表示为

其中,Q为总感应电荷,E为杨氏模量,A为表面积,Δl和l0分别为压电材料的长度变化量和初始长度。忽略电场对应变的影响,对式(3)微分,得纯电阻负载的输出电流。

其中,I为电流,V为输出电压,RL为负载电阻。压电薄膜的内部电容为

联立式(3)和式(5),产生的能量可以写成:

其中,F为压电材料受到的外力,Ay为有效接触面积。
式(4)和式(6)表明,压电薄膜的快速变形可以提高输出电流和电压,且从式(6)可以看出,大的应变可以提高输出能量和功率。
在此将压电俘能器结构设计成一种弧形三明治结构,弧形压电俘能器主要由预弯曲的金属弹性基板和PVDF压电薄膜通过环氧树脂粘合组成,其横截面结构示意图如图4所示。通过将PVDF压电薄膜粘贴在预弯曲的弧形金属弹性基片上,引出电极以输出产生的电荷。
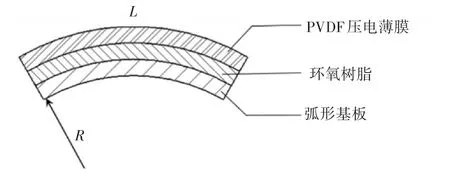
图4 弧形压电俘能器的横截面示意图
设计成这种结构的目的一是为了在相同的受力下产生较大的变形,从而提高压电俘能器的输出能量;二是为了使设计的压电俘能器更贴合人体腿部的弧形,以此来减小对人体运动姿态的影响;三是弹性的金属基片可以缩短俘能器弯曲-恢复的时间,增大弯曲挠度,且为压电薄膜施加恢复原状时产生的弹性力,从而提高压电俘能器的输出电能。选用压电材料为智美康科技有限公司的产品IPZ-100压电薄膜,压电应变系数和相对介电常数如表1所示。

表1 压电薄膜的材料参数
制作俘能器时,粘贴前应注意用酒精擦拭金属弹性基片和压电薄膜,均匀涂抹环氧树脂,避免气泡的产生。将俘能器安装在人体腿部膝盖处,使得人体行走或者跑步时,直接驱动其发生弯曲变形。
4.2 压电能量收集电路设计
压电俘能器产生的交流电具有高电压、微小电流的特点,致使俘能器输出的电能无法直接为低功耗器件供电。所以需先将产生的交流电整流成直流电,再进行调压、稳压处理,最后对储能元件进行充电,积累电能,进而驱动微功耗电子器件。压电能量收集电路主要包括能量采集电路和电源管理电路两部分。
能量采集电路是在二倍压整流电路的基础上优化改进的,如图5所示,该电路保留二倍压电路的特点,在将俘能器产生的交流电整流的同时,升高其能量采集电路的输出,并将电路对电容的充、放电过程分开,充电时,电容C4与C5串联连接,降低了电路的等效电容,加快了充电速率,缩短了充电时间;放电时,电容C4与C5并联连接,增加了电路的等效电容,降低了放电速率,提高了放电的时间。
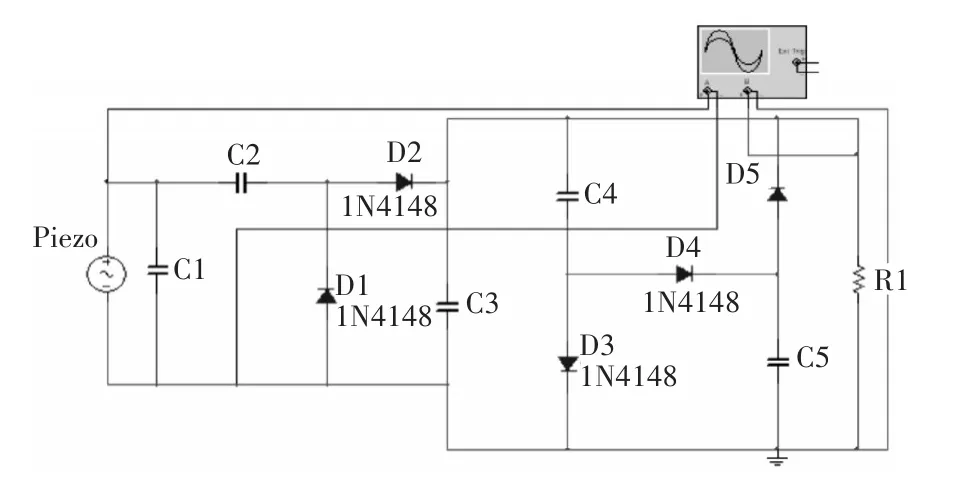
图5 改进后的能量采集电路
电源管理电路如图6所示,为了减少电路中的能量损耗,选择低功耗的电源管理电路芯片LTC3588-1,所设计的电源管理电路主要利用了芯片中的降压型DC/DC转换器,通过将上一级能量采集电路的输出接入芯片的VIN引脚,当VIN引脚上的电压上升直至达到欠压锁定电路的开启电压阈值时,降压型DC/DC转换器被导通,输出稳定的直流信号;当VIN引脚上的电压降低至欠压锁定电路的关闭电压阈值时,降压型DC/DC转换器被关闭,进入睡眠模式,直至被再次唤醒。CAP引脚和VIN引脚连接一个电容,目的是去除电压轨之间的耦合,VIN2引脚与GND引脚之间连接一个电容,目的是为电压选择提供一个高电平。其中压电电源管理电路D0引脚连接低电平,且D1引脚连接高电平,使压电电源管理电路输出稳定的直流信号。
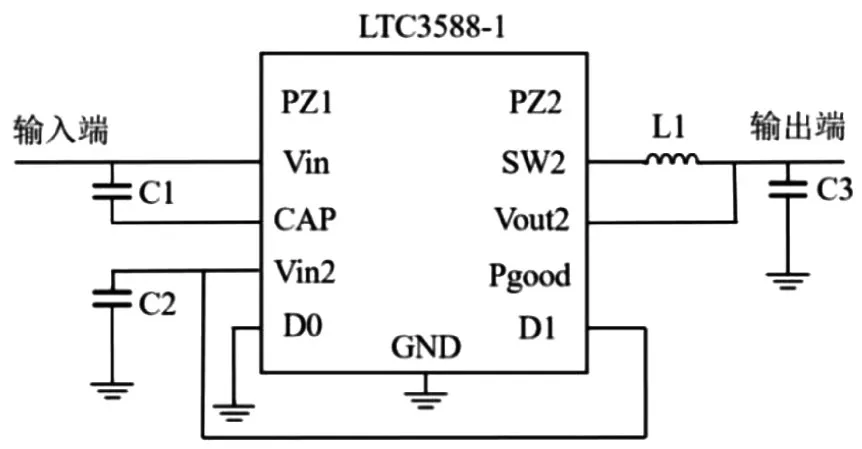
图6 压电电源管理电路
4.3 压电式人体腿部运动俘能装置及验证试验
设计的压电式人体腿部运动俘能装置如图7所示。装置主要由以下部分组成:1)模拟人体腿部运动平台;2)数字示波器(RIGOL公司的DS1054Z,探头型号为RP2200);3)SR570低噪声前置电流放大器;4)压电俘能器;5)压电能量收集电路;6)步进电机及其驱动模块。

图7 人体腿部运动能量收集系统
为了证明搭建的压电式人体腿部运动俘能装置可以给智能纺织品电子器件供电,将LED灯接入系统电路中,观察到LED灯瞬间被点亮,过了一会后逐渐熄灭。
5 结语
本文通过构建人体腿部运动模型,建立了人体腿部运动简化机构的模型,并且设计了人体腿部压电俘能器和压电能量收集电路,搭建了压电式人体腿部运动俘能装置。通过验证试验,存储到的能量可以成功点亮LED灯,可以为一些低功耗的智能纺织品电子器件供电。
