脊柱机器人辅助椎弓根钉经皮固定胸腰椎骨折△
2021-06-02周纪平姜泽威杨永军姜传杰姚树强于建林徐梓耀殷培良杨小霞谭远超刘永强
周纪平,姜泽威,杨永军*,姜传杰,姚树强,刘 彬,于建林,吴 瑞,杨 凯,徐梓耀,殷培良,杨小霞,谭远超,刘永强
(1.山东省文登整骨医院,山东威海264400;2.山东中医药大学,山东济南250014)
脊柱微创手术面临的困扰:客观因素上,椎弓根表面解剖形态复杂,存在变异性,这对椎弓根螺钉的精准置入造成很大的障碍。椎弓根周围有许多重要的组织,一旦螺钉位置欠佳很容易导致神经、血管等损伤,另外微创通道下手术视野小,徒手置钉的难度和风险更高。相关研究发现徒手置钉有4.9%~37.5%的误置率[1~4],而这其中有0.8%~2%出现永久性神经损伤。随着医疗技术的发展与医疗环境的改变,患者越来越重视自己在接受治疗前后生活水平质量的变化,而这无形中就为临床医生增添了更大的压力。此外,微创置钉术中需多次透视,增加了放射线暴露风险[5]。为了提高脊柱椎弓根置钉的准确率,脊柱手术机器人导航系统逐渐发展起来,其中通过FDA和CFDA认证的Renaissance手术机器人导航系统在临床应用中表现良好,受到广大脊柱外科医生的青睐[6]。基于CT基础上制定的3D术前计划,其准确性不依赖于解剖标志以及术中视野的大小,克服了来自临床的挑战,学习曲线较短,显著提升医师的手术能力[7]。国内相关研究数据较少,为此作者团队设计并实施了本项临床研究,探讨Renaissance机器人在胸腰椎骨折微创手术中的应用效果,以期发掘其在胸腰椎骨折微创手术治疗中的潜力和应用价值。
1 资料与方法
1.1 纳入与排除标准
纳入标准:(1)明显近期外伤史,影像学检查显示单节段胸腰椎骨折,且骨折累及前中柱或三柱[8](图1a);(2)无手术禁忌证,可耐受手术治疗。
排除标准:(1)多系统疾病不能耐受手术者;(2)影像学检查显示椎管Ⅱ度及以上梗阻;(3)骨密度检查结果示严重骨质疏松者。
1.2 一般资料
回顾性分析2015年7月~2018年12月本院收治的单节段胸腰椎骨折患者的临床资料,共97例患者符合上述标准,纳入本研究。其中,男62例,女35例。依据术前医患沟通结果,将患者分为两组。两组术前一般资料见表1。两组在年龄、性别构成、损伤至手术时间和骨折部位的差异均无统计学意义(P>0.05)。本研究获山东省文登整骨医院伦理委员会批准,所有患者均知情同意,并签定知情同意书。

表1 两组患者术前一般资料与比较
1.3 手术方法
机器人组:术前患者均行手术节段薄层CT扫描及MPR重建,将机器人组薄层CT数据输入Renais⁃sance系统,可以直接在患者虚拟3D CT片上试用不同规格的螺钉,来指导术中螺钉选择,不需要测量,即可规划最优置钉路径(图1b)。患者全麻后,俯卧位于碳纤手术床上,按正常流程进行消毒,铺无菌巾单,将术前规划的置钉方案导入Renaissance系统。连接桥轨至患者,平台固定要牢固,否则影响操作的精准度,C形臂X线机拍摄脊柱正斜位影像,自动注册术前CT,与术前的手术计划同步(图1c),将RBT设备以及套筒操作系统导引至计划轨道,在机器人引导下完成椎弓根螺钉的置入(图1d)。
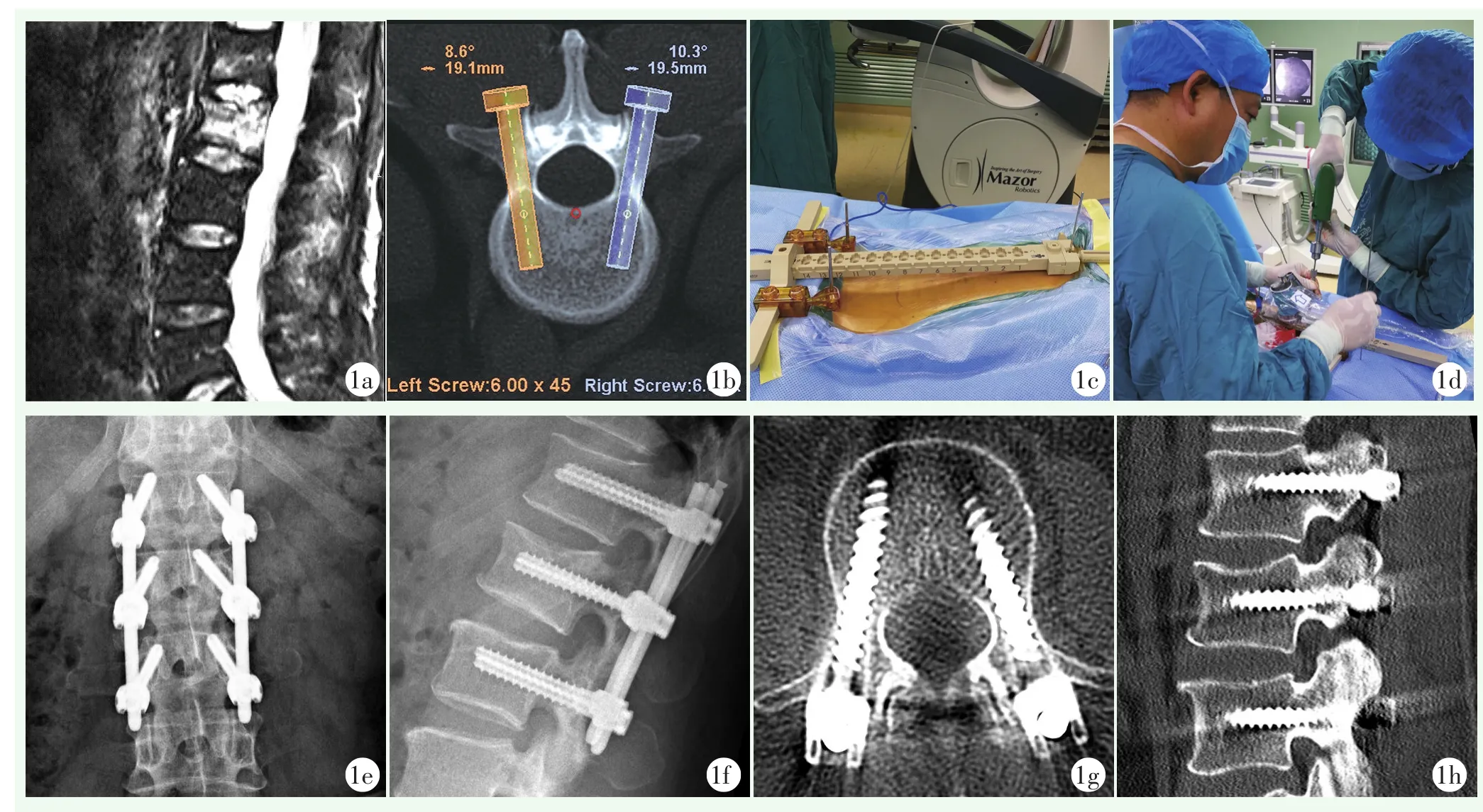
图1 患者,男,54岁,腰椎爆裂骨折 1a:术前MRI显示L2椎体爆裂骨折,累及三柱,后侧韧带复合体损伤 1b:在手术模拟系统中设置椎弓根置钉参数并设计最佳置钉路线 1c:安装桥轨,透视定位,自动注册,与术前的手术计划同步 1d:机器人引导下完成椎弓根螺钉的置入 1e,1f:术后正侧位DR片显示骨折复位满意,内固定物位置良好 1g:CT横切面显示T12椎弓钉位置良好 1h:术后矢状面CT显示L1~3椎弓根钉位置良好
徒手组:C形臂X线机透视定位置钉椎体,确定手术节段,并在体表对双侧椎弓根投影做标记。在双侧椎弓根投影区作一1 cm纵向切口,在C形臂X线机正位与侧位透视下,于手术节段上部、下部邻近椎体经双侧椎弓根穿刺并放入穿刺针;正侧位透视确认穿刺针位置满意后,完成椎弓根置钉。
1.4 评价指标
记录围手术期资料,包括手术时间以及术中出血量、射线曝光时间、单钉置入时间、下地行走时间、住院时间等。采用疼痛视觉模拟评分(visual ana⁃logue scale,VAS)和日本骨科协会腰评分(Japanese Orthopaedic Association,JOA)评价临床效果。术后1周内行CT+MPR重建及DR检查,测量DR侧位片Cobb角,对后凸畸形的矫正和椎体高度恢复情况进 行评估,采用Moddi法评估螺钉位置。
1.5 统计学方法
2 结果
2.1 围手术期情况
机器人组34例,置入178枚椎弓根螺钉,其中0级175枚,1级3枚,2级0枚,置钉准确率98.31%;徒手组63例,置入334枚椎弓根螺钉,其中0级287枚,1级21枚,2级16枚(穿透内侧骨皮质6枚),3级10枚(穿透内侧骨皮质4枚),置钉准确率85.93%,两组间差异有统计学意义(P<0.001)。
机器人组无1例神经损伤,安全置钉率达到100.00%。徒手组8例患者术后出现神经损伤,其中,2例3级置钉患者因为术后神经症状加重,表现为平卧位无法伸直腿,再次手术调整钉道后症状缓解,经3周营养神经、脱水药物治疗后症状消失;余6例患者术后神经症状较轻,经术后常规药物治疗、护理后症状消失;安全置钉率达到92.20%。两组安全置钉率的差异有统计学意义(P<0.001)。
两组患者围手术期资料见表2,机器人组在手术时间、术中出血量、术中射线曝光时间和单钉置入时间均显著优于徒手组(P<0.05),但是,两组在术后下地行走时间和住院时间的差异无统计学意义(P>0.05)。
表2 两组患者围手术期资料(±s)与比较
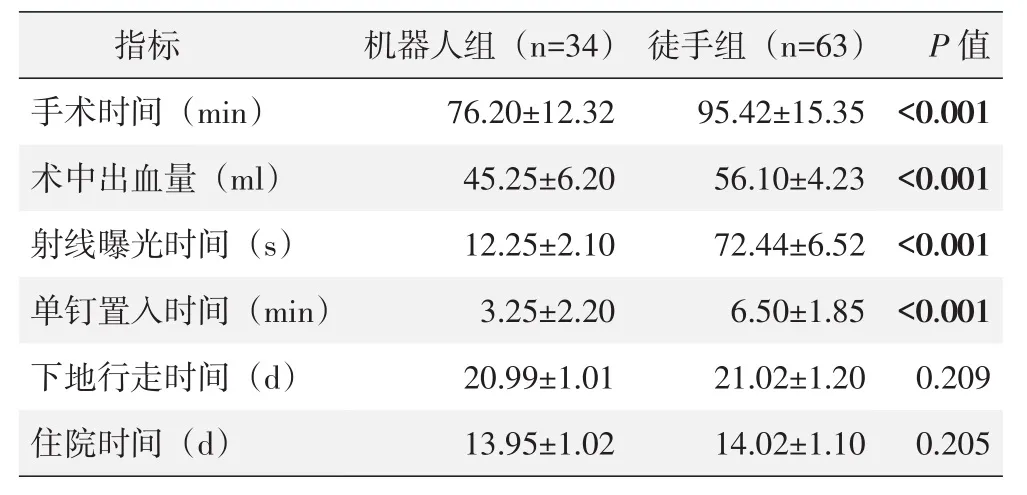
表2 两组患者围手术期资料(±s)与比较
射线曝光时间(s)单钉置入时间(m i n)下地行走时间(d)住院时间(d)1 2.2 5±2.1 0 3.2 5±2.2 0 2 0.9 9±1.0 1 1 3.9 5±1.0 2 7 2.4 4±6.5 2 6.5 0±1.8 5 2 1.0 2±1.2 0 1 4.0 2±1.1 0<0.0 0 1<0.0 0 1 0.2 0 9 0.2 0 5
2.2 随访结果
两组患者均随访12个月以上,随访过程中,两组患者均无再次损伤发生,无疼痛和神经症状加重者;无椎弓根螺钉松动或断钉现象,两组均无再次手术翻修者。
两组患者VAS评分及JOA评分结果见表3。随时间推移,两组患者VAS评分显著下降(P<0.05),而两组JOA评分均显著增加(P<0.05)。相应时间点,两组间VAS评分及JOA评分的差异均无统计学意义(P>0.05)。
表3 两组患者随访结果(±s)与比较

表3 两组患者随访结果(±s)与比较
机器人组(n=3 4)徒手组(n=6 3)P值6.1 0±1.3 2 6.0 4±1.8 1 0.2 3 1指标V A S平分(分)术前3.0 5±1.0 0 1.2 6±0.4 6<0.0 0 1 2.9 8±1.2 2 1.3 0±0.3 8<0.0 0 1 0.1 2 2 0.2 7 6术后6个月末次随访P值J O A评分(分)术前术后6个月末次随访P值1 4.1 0±2.2 0 2 1.3 4±2.6 3 2 2.2 5±2.2 0<0.0 0 1 1 4.0 2±2.4 1 2 1.2 5±2.2 5 2 2.1 4±2.0 6<0.0 0 1 0.2 4 2 0.1 8 8 0.1 0 9
末次随访时,机器人组34例中,34例患者均完全无痛;34例均行走正常,无跛行;患者均弯腰活动正常;全部恢复伤前运动和劳动能力。徒手组63例中,63例患者均完全无痛;患者均行走正常,无跛行;61例弯腰活动正常,2例弯腰活动轻度受限;61例恢复伤前运动和劳动能力,2例未恢复至伤前运动和劳动能力水平。
2.3 影像评估
两组患者影像测量结果见表4。与术前相比,术后两组患者的伤椎后凸Cobb角均显著减少(P<0.05),而两组椎体前缘高度均显著增加(P<0.05);与术后1周相比,末次随访时两组患者的后凸Cobb角和椎体前缘高度均无显著变化(P>0.05)。相应时间点,两组间后凸Cobb角和椎体前缘高度的差异均无统计学意义(P>0.05)
表4 两组患者影像评估结果(±s)与比较
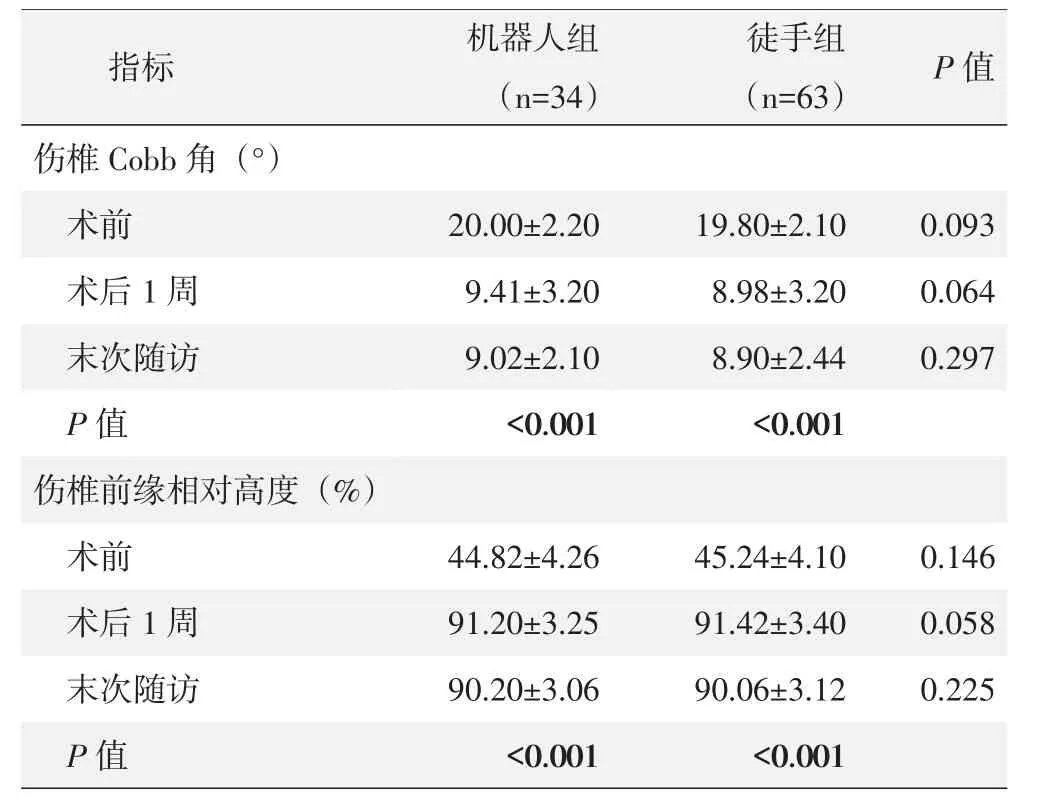
表4 两组患者影像评估结果(±s)与比较
指标机器人组(n=3 4)徒手组(n=6 3)P值2 0.0 0±2.2 0 1 9.8 0±2.1 0 0.0 9 3伤椎C o b b角(°)术前9.4 1±3.2 0 9.0 2±2.1 0<0.0 0 1 8.9 8±3.2 0 8.9 0±2.4 4<0.0 0 1 0.0 6 4 0.2 9 7术后1周末次随访P值伤椎前缘相对高度(%)术前术后1周末次随访P值4 4.8 2±4.2 6 9 1.2 0±3.2 5 9 0.2 0±3.0 6<0.0 0 1 4 5.2 4±4.1 0 9 1.4 2±3.4 0 9 0.0 6±3.1 2<0.0 0 1 0.1 4 6 0.0 5 8 0.2 2 5
至末次随访时,两组患者均未见内固定物松动、断裂者。
3 讨论
临床中,脊柱胸腰椎骨折相对较为常见[9,10],容易导致脊柱畸形和神经功能损害[11]。目前,大量的脊柱外科手术需要通过置椎弓根螺钉来进行固定、矫形,但是个体间椎弓根形态存在差异,且周围毗邻脊髓和重要神经血管,易对其造成损伤从而导致各种并发症[12,13]。传统的徒手置钉方法风险较大,对手术操作人员的经验要求较高,且存在置钉过程中需要反复透视、频繁调整所置螺钉的位置以及螺钉易突破骨皮质的缺点[14]。运用Renaissance机器人引导系统,可以术前直接在虚拟3D CT片上设计出最优置钉路径,实现个体化精准医疗。俞阳等[15]研究发现,通过机器人辅助行胸腰椎椎弓根内置钉,在手术时间、术中出血量、射线曝光时间、单钉置入时间以及置钉准确度和安全性等方面明显优于徒手置钉。付松等[16]通过机器人导航系统共置钉234枚,其中226枚(96.6%)螺钉位置满意,8枚(3.4%)未完全在椎弓根内,按照Raley-Mobbs分类法,置钉欠佳率为1.3%。在本次研究中,通过机器人辅助置钉的患者术中出血量相对较少,且能够更早的下地活动,从而减少了术后并发症的发生,尤其是对于老年患者,术后长时间卧床形成血栓、褥疮及骨质疏松的风险相对较高,因此Renaissance机器人辅助置钉具有更高的安全性和适用性;机器人组和徒手组的置钉准确率分别为98.31%和85.93%,安全置钉率分别为100.00%和92.20%。Renaissance机器人辅助置钉,操作精度高、稳定性强,降低了手术操作难度;放射线暴露时长机器人组远少于徒手组(P<0.05),减少了辐射对身体造成的伤害;且Renaissance机器人辅助置钉学习曲线短,年轻脊柱外科医生可在短时间内掌握,从而提高手术治疗水平。两组VAS评分及JOA评分、Cobb角、椎体前缘高度恢复情况无显著差异。总之,Renaissance机器人导航系统,使得脊柱椎弓根螺钉的置入更加精准和安全,在没有显著增加手术时间的同时,解决了脊柱微创手术中置钉精确度不足、安全性不高、辐射暴露过多、操作疲劳等问题。
Renaissance机器人导航系统在脊柱外科领域的应用才刚刚起步,还有许多临床研究期待进一步开展,但机器人系统的智能化、微创化以及精准、稳定的优势已充分展现了其在临床应用的巨大潜能;机器人导航系统将来在脊柱外科微创领域的广泛应用将会是广大患者的福音。
本研究同时也存在不足:(1)研究样本量较少,需要更大样本量的临床研究;(2)患者出院后未对其长期随访,长期治疗效果有待大样本量、长时间随访验证。
