一种基于复信号解调的生命体征探测雷达
2021-06-01邰凡彬杭雪莲钱志成刘继轩王星帅马家驹
邰凡彬,刘 云,周 雯,杭雪莲,钱志成,刘继轩,王星帅,马家驹
(南京航空航天大学 电子信息工程学院,江苏 南京211106)
随着现代社会对医疗健康愈加重视,基于雷达传感的非接触式生命体征探测技术已成为重要的技术之一[1]。相比于传统的生命信号测量方式,采用雷达传感系统的优点主要包括:非接触的工作方式能够减少准备时间、避免二次伤害、测量数据可靠稳定、全天候工作。上述优点使得雷达传感方式可被应用于睡眠呼吸异常监测、地震搜救等任务中[2-3]。
目前,国内外对雷达系统在非接触式生命体征探测应用场景中的研究[4-6]主要分为两个方向:一是采用数字信号处理与射频系统相结合的方法提升系统性能;二是通过对射频结构的改进来减小干扰信号对系统造成的影响。
研究人员在1 150 MHz频段采用计算机控制的零平衡方法对未调制载波进行对消,取得了周期性的微波心动信号[7]。若采用更高的频段,系统则具有更高的灵敏度和更低的信噪比[8]。通过增加探测天线的转向角,能够提高检测的准确率[9]。将采用正交解调方案的系统的探测数据映射到I/Q星座图中,能够实现追踪定位的功能[10]。采用低功耗六端口雷达能够提取人在不同姿势下的生命体征,并能恢复出周期性时域信号[11]。在多普勒雷达中,采用锁相环结构能够避免小角近似问题和空探测点问题[12],但系统结构较为复杂。
本文基于多普勒雷达原理主要研究了复信号解调技术[13],设计了一套基于复信号解调的多普勒生命体征探测雷达系统,用以探测呼吸速率和心跳速率两项生命体征。该系统克服了探测中的空探测点问题和直流偏置的影响,从而避免了信号在解调过程中的直流补偿,简化了系统结构。
1 系统原理
多普勒雷达的基本原理是通过发射接收电磁波来探测运动目标产生的相移频移等多普勒信息。对于生命体征探测雷达而言,具体工作就是解调由呼吸、心跳引起的胸腔振动调制产生的多普勒信息。这些信号都能建模为胸腔运动对入射电磁波进行调制,并返回给接收机[6]。本文研究的生命体征只包括心跳速率和呼吸速率。
1.1 单频连续波多普勒雷达数学模型
本文所设计的非接触式生命体征探测雷达主要由收(Rx)发(Tx)天线、射频前端和数字信号处理单元组成,其中射频前端输出的基带信号经模数转换器(A/D Converter,ADC)转换成数字信号后由数字信号处理单元进行处理。该系统的总体架构如图1所示。
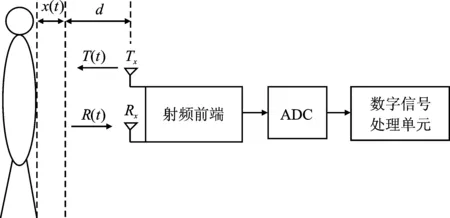
图1 生命体征探测雷达总体架构Figure 1. Overall architecture of vital sign detection radar
在本文涉及雷达工作条件下,电磁波可以看做为平面波,待测目标的反射、入射信号的数学模型可以进行合理简化。该系统的发射信号可表示为
T(t)=cos[2πft+φ(t)]
(1)
其中,f表示载波频率;φ(t)表示相位噪声。由心跳或呼吸引起的胸腔振动可表示为
x(t)=m·sin(ωt)
(2)
其中,m表示振动幅度。当发射信号T(t)射向距探测系统距离为d的待测对象的身体时,其相位信息受到调制,反射信号可近似表示成
(3)
其中,c和λ分别表示电磁波的传播速度和波长。将发射信号T(t)作为本振信号与反射信号R(t)进行下变频,可得到基带信号
(4)
其中,Δφ(t)=φ(t)-φ(t-2d/c)表示振荡器的残余相位噪声;θ=4πd/λ+θ0主要由探测距离d和相位偏移θ0共同决定;反射面的相位偏移(约180°)、混频器与天线之间的距离等因素共同决定了θ0。
1.2 空探测点问题
当θ恰好是π/2的奇数倍时,由于x(t)≪λ,所以基带输出信号可小角度近似为
(5)
此时,可获得最佳的相位感知。基带输出信号约为周期性的胸腔移位分量x(t)与残余相位噪声Δφ(t)之和。
当θ恰好是π的整数倍时,则基带输出信号约为
(6)
此时,基带输出信号不再与时变位移成线性关系,系统的感知能力降低。当本振信号T(t)与反射信号R(t)同相或保持180°相位差时,便会产生空探测点问题。由于变量θ仅与系统和待测对象之间的距离d有关,因此每隔λ/4的探测距离便会出现一个空探测点。在ISM(Industrial Scientific Medical)频段,系统采用2.45 GHz的工作频率,则大约每3 cm会出现一个空探测点,并且难以通过调整收发系统的位置来避免该问题。
1.3 复信号解调
在近似解调的基础上,采用正交混频和复信号解调[4]的方式可以有效地避免空探测点问题。经典的正交解调结构接收机如图2所示。
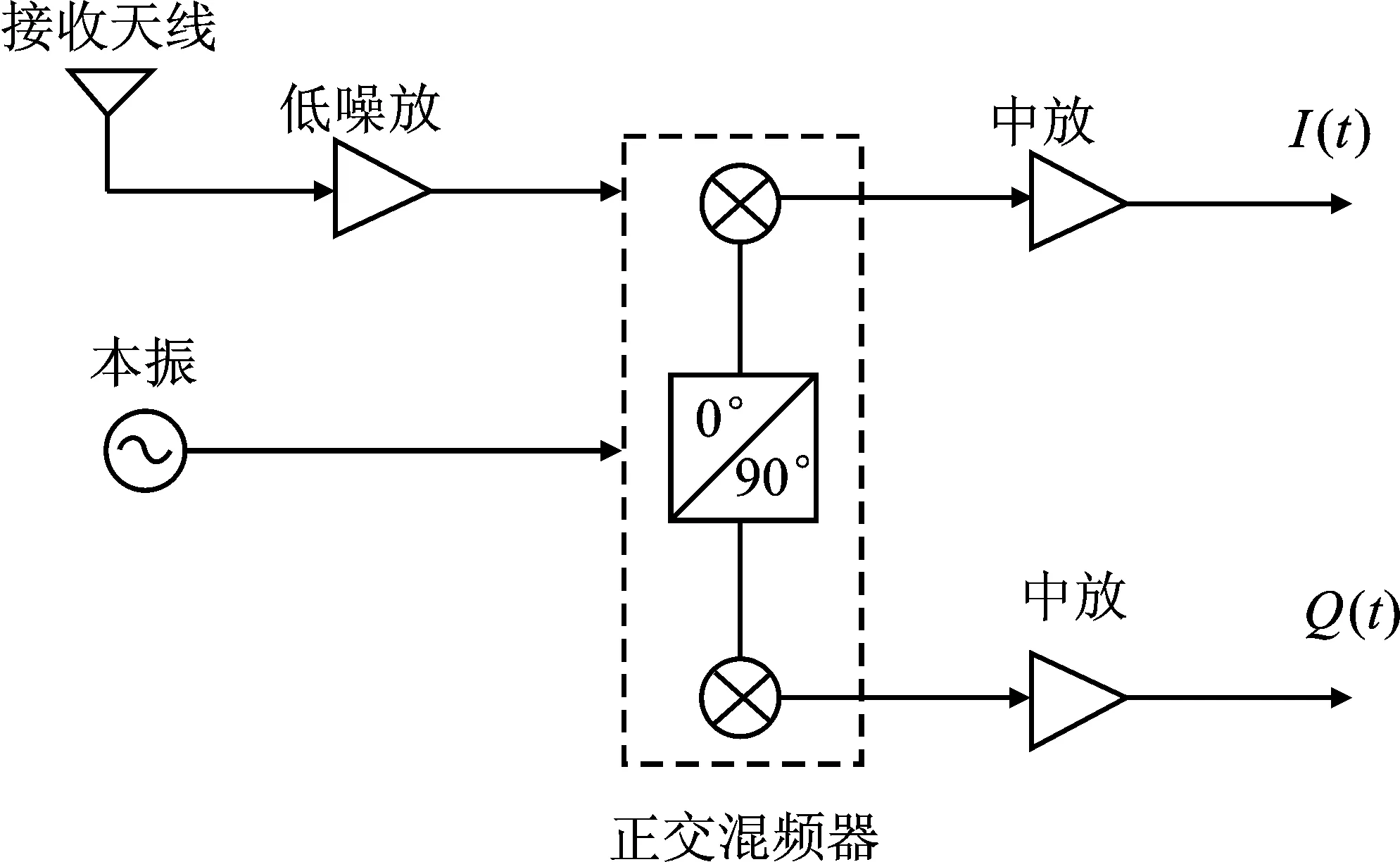
图2 典型正交解调结构接收机Figure 2. Typical quadrature demodulation structure receiver
将如图2所示结构的接收机应用到本文研究的系统中,采用正交下变频,两路输出通道的输出信号I(t)和Q(t)可以分别重新表示成式(7)和式(8)。
(7)
(8)
当θ+π/4为π的整数倍时,I通道信号将会面临空探测点问题,对应式(6);而此时,θ-π/4将会是π/2的奇数倍,即Q通道信号刚好处于最佳的相位解调位置,对应式(5),反之亦然。在采用正交混频的方案时,最糟糕的情况为θ是π的整数倍,此时θ+π/4和θ-π/4都是π/4的奇数倍,I/Q通道信号均不处于最佳探测位置,基带输出信号可以表示成
BI(t)=BQ(t)≈
(9)
只要x(t)≪λ,则式(9)的一次项将远大于平方项,生命信号依旧会被探测到。
将相位差为90°的I/Q两路基带信号合成复数信号如式(10)所示。
C(t)=BI(t)+jBQ(t)=
(10)
复信号中总有一部分分量远离空探测点,这样对复信号进行快速傅里叶变换(Fast Fourier Transform,FFT)变换就能够从频谱中得到生命体征信号的幅频信息,从而克服小角近似过程中的空探测点问题。此外,I/Q两路信号中存在的直流偏移量并不影响其它频点的信息解调,避免了直流偏移的影响。
2 设计方案
本文提出的多普勒生命体征探测雷达系统由收发天线、射频模拟电路、数字信号处理系统3个单元组成。生命体征探测雷达系统框图如图3所示。
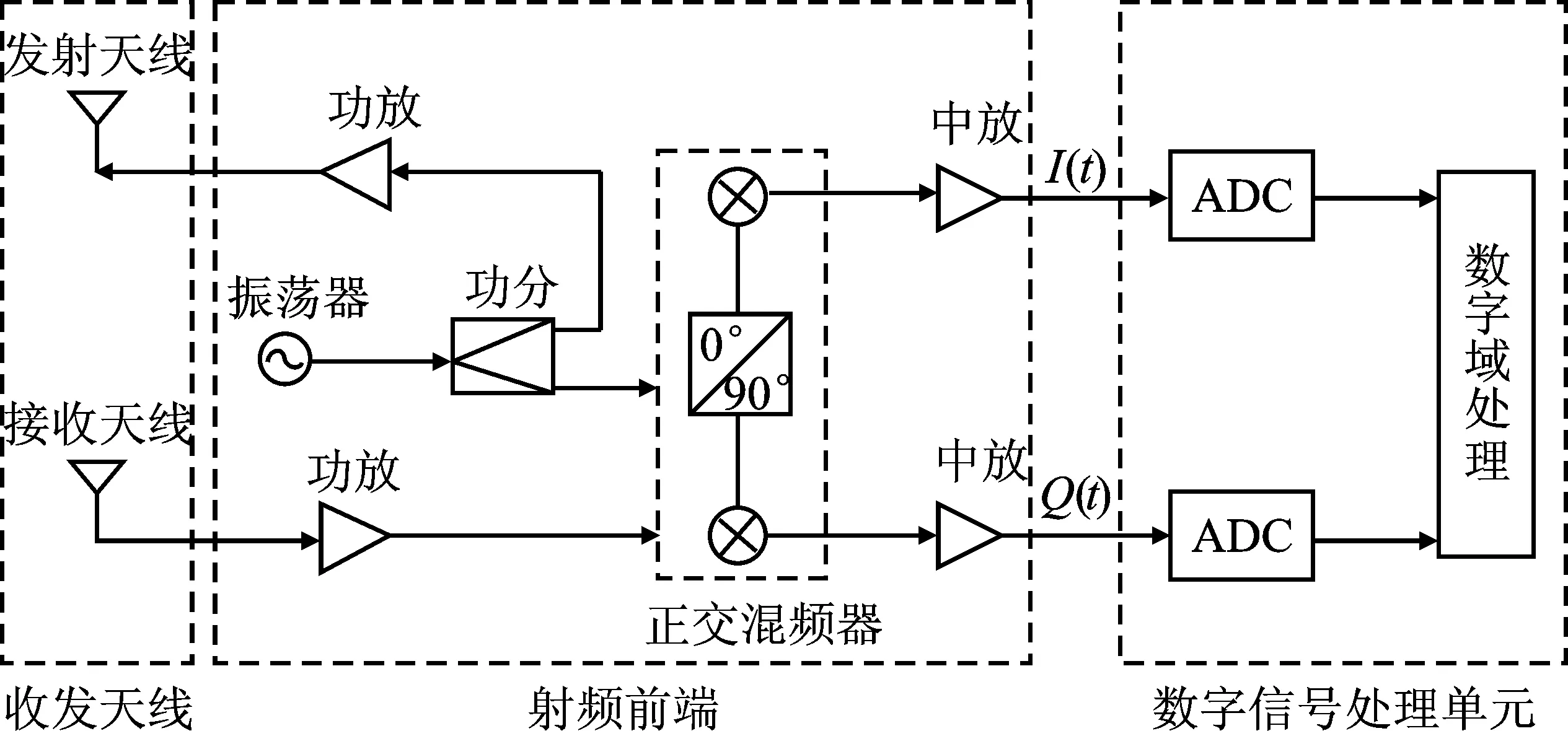
图3 生命体征探测雷达系统框图Figure 3. System block diagram of the vital sign detection radar
系统由压控振荡器产生频率为2.45 GHz的射频信号,信号经功分器分为两路:其中一路信号经功率放大器放大后通过发射天线射向待测对象;另一路信号作为本振,与接收天线接收到的携带生命体征信息的反射信号进行正交混频,输出两路(I/Q)解调信号。这两路信号经中频放大器后由ADC转换成数字信号,然后进行快速傅里叶变换并将幅频信息显示出来,从而完成对生命体的呼吸速率和心跳速率的非接触检测。系统用到的核心器件如表1所示。
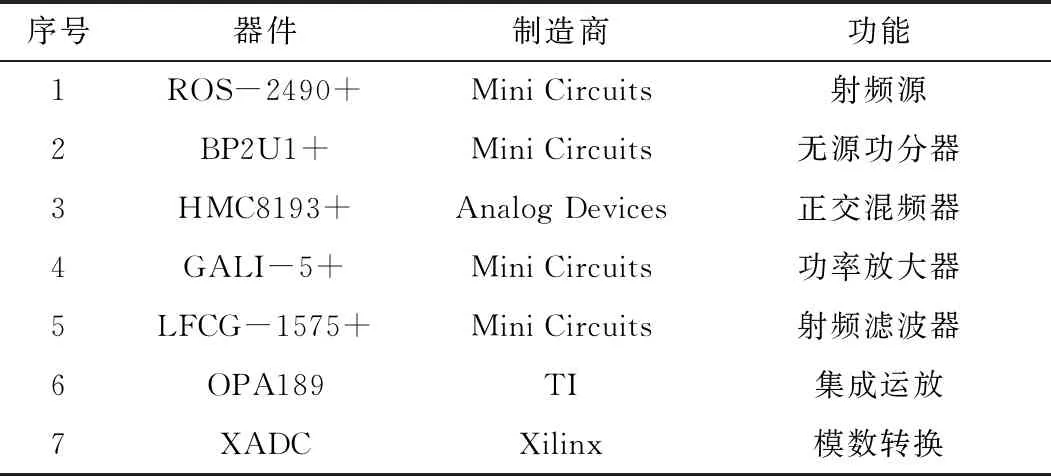
表1 生命体征探测雷达主要器件
2.1 天线及射频电路设计
系统选用厚度h为0.508 mm,介电常数εr为3.55,正切角损耗tanδ为0.002 7的罗杰斯4003C板材。收发天线采用线极化的2×2矩形微带贴片阵列天线,中心频率f0=2.45 GHz。
压控振荡器选用Mini Circuits 公司的ROS-2490+芯片,通过电压调谐可以产生2 280~2 490 MHz的射频信号。产生的信号用Mini Circuits公司的BP2U1+功分器分成两路:一路作为发射机的信号源;另一路作为接收机的本振,实现发射机和接收机的同步。
混频器采用Analog Devices 公司的HMC8193 无源I/Q混频器。该芯片可应用于直流至4 GHz的下变频输出,直接输出相位差为90°的两路中频信号。考虑到混频器的驱动频率以及信号在整个系统以及传播路径中的衰减,系统的发射机和接收机都需要选用Mini Circuits 公司的GALI-5+ 功率放大器,其最大输出功率为18 dBm,满足设计要求。
2.2 中频模拟电路设计
系统在理想情况下,混频器输出的I/Q两路基带信号应该包含0.3 Hz和1.1 Hz左右的两个有效频率分量。在实际情况下,混频器的输出信号存在直流分量和交调信号干扰,因此还必须设计中频模拟电路进行处理。
系统选用Mini Circuits公司的射频低通滤波器LFCG-1575+来滤除交调信号的干扰。该滤波器在射频信号频率大于1.96 GHz时,衰减达到10 dB,并且随着频率的提高,衰减也在提高。当频率达到3 GHz时,衰减达到最大约为61 dB。滤除射频干扰的信号经过一个10 μF的电容以隔离直流分量。系统选用TI公司的OPA189作为模拟低通滤波器的运放,每一路基带信号都经过由2片OPA189组成的两个无限增益多路反馈二阶低通滤波器,最终的信号经ADC采样后进行FFT变换得到频谱信息。
2.3 数字信号处理单元设计
系统采用的ADC转换器为Xilinx ZYNQTM-7000扩展式处理平台ZedBoard开发板内部集成的XADC模块。该模块包括两个12 bit 、1 MSPS采样速率的模数转换器和相关的片上传感器。由于生命信号的频率通常小于3 Hz,依据奈奎斯特采样定理,1 MSPS的采样速率满足设计要求。
信号经XADC采样后将数据通过串口传至上位机,由MATLAB实现FFT变换,在进行低通滤波并去除直流信号后输出归一化频谱得到心跳、呼吸频率。
3 系统加工及测试
3.1 系统加工调试
基于上述理论分析和设计方案,本文设计加工制作工作频段在2.45 GHz的收发天线和射频前端,并基于XADC和MATLAB设计了上位机进行数字信号处理。
将绘制完成的PCB(Printed Circuit Board)和配套腔体检查无误后投板生产。生产周期结束,将采购的器件焊接到PCB板中。调试完成后,用金属腔体进行封装。两路基带信号通过同轴线与开发板上的XADC相连,并通过串口将采样后的数字信号传输给上位机进行处理。装配好的系统实物如图4所示。
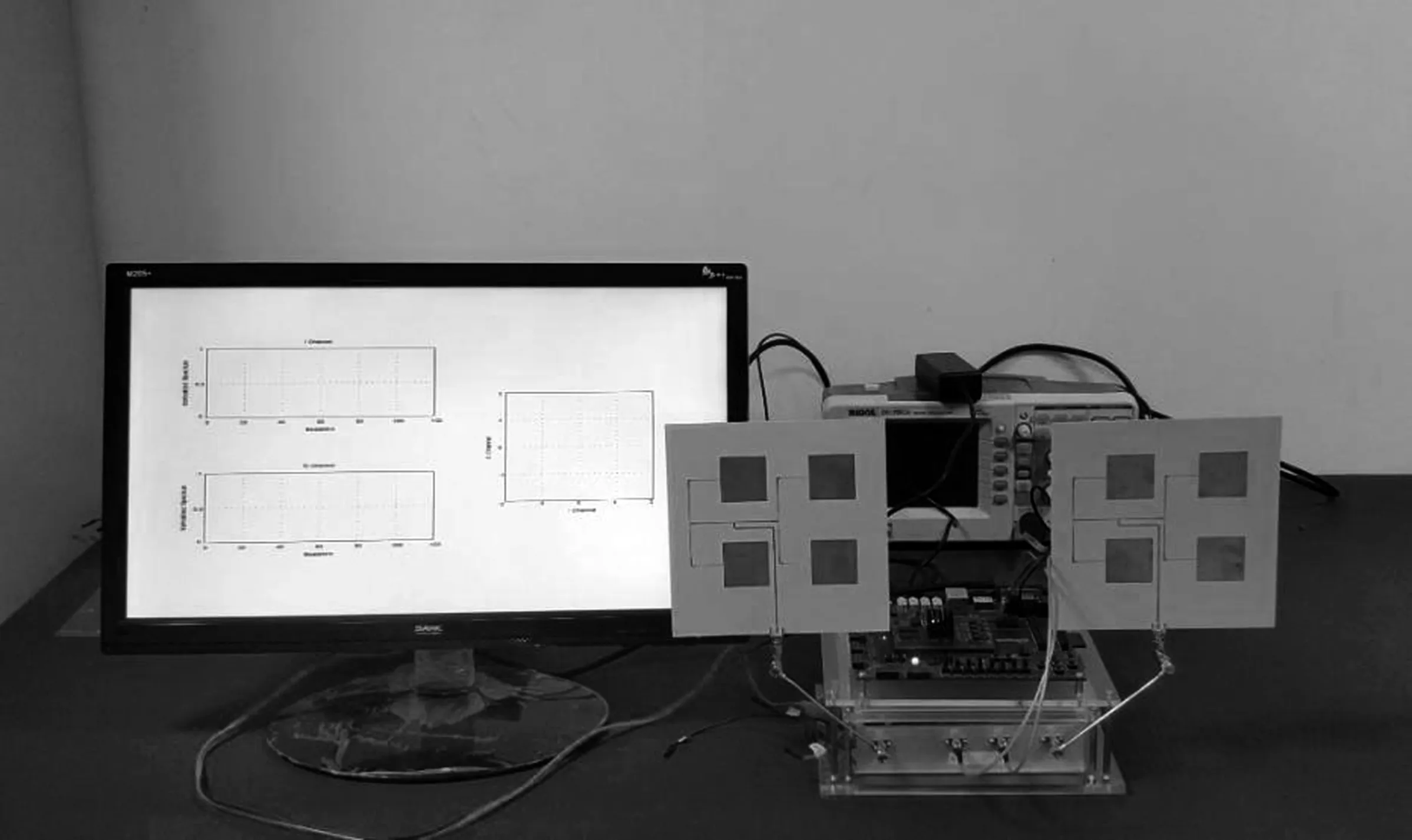
图4 系统实物图Figure 4. Physical diagram of the system
3.2 系统测试
待测对象位于系统正前方0.8 m处,保持静止状态,匀速呼吸。此时人体中存在由呼吸和心跳引起的胸腔的微弱振动。呼吸引起的胸腔振动幅度约为5 mm[14-16],而心跳对应的振幅远小于胸腔的振幅。正常人呼吸速率约为18次·min-1,心跳速率约为70次·min-1。因此,系统正常工作时,在幅频曲线上应在0.3 Hz和1.2 Hz左右出现两个明显的峰值,其分别对应呼吸和心跳速率,其中呼吸峰值对应的幅度应明显大于心跳对应的幅度。
系统正常工作时的探测结果如图5所示。将实验结果对比上文空探测点问题的理论分析可知,当I路信号感知能力下降时,Q路信号获得了最佳的感知效果。对复信号进行FFT变换,其结果平衡了I/Q两路基带信号的感知能力,从而解决了空探测点问题。从图5中可以看到0.3 Hz左右的呼吸速率谱线和1.1 Hz左右的心跳速率谱线,表明该系统实现了生命体征探测的功能。
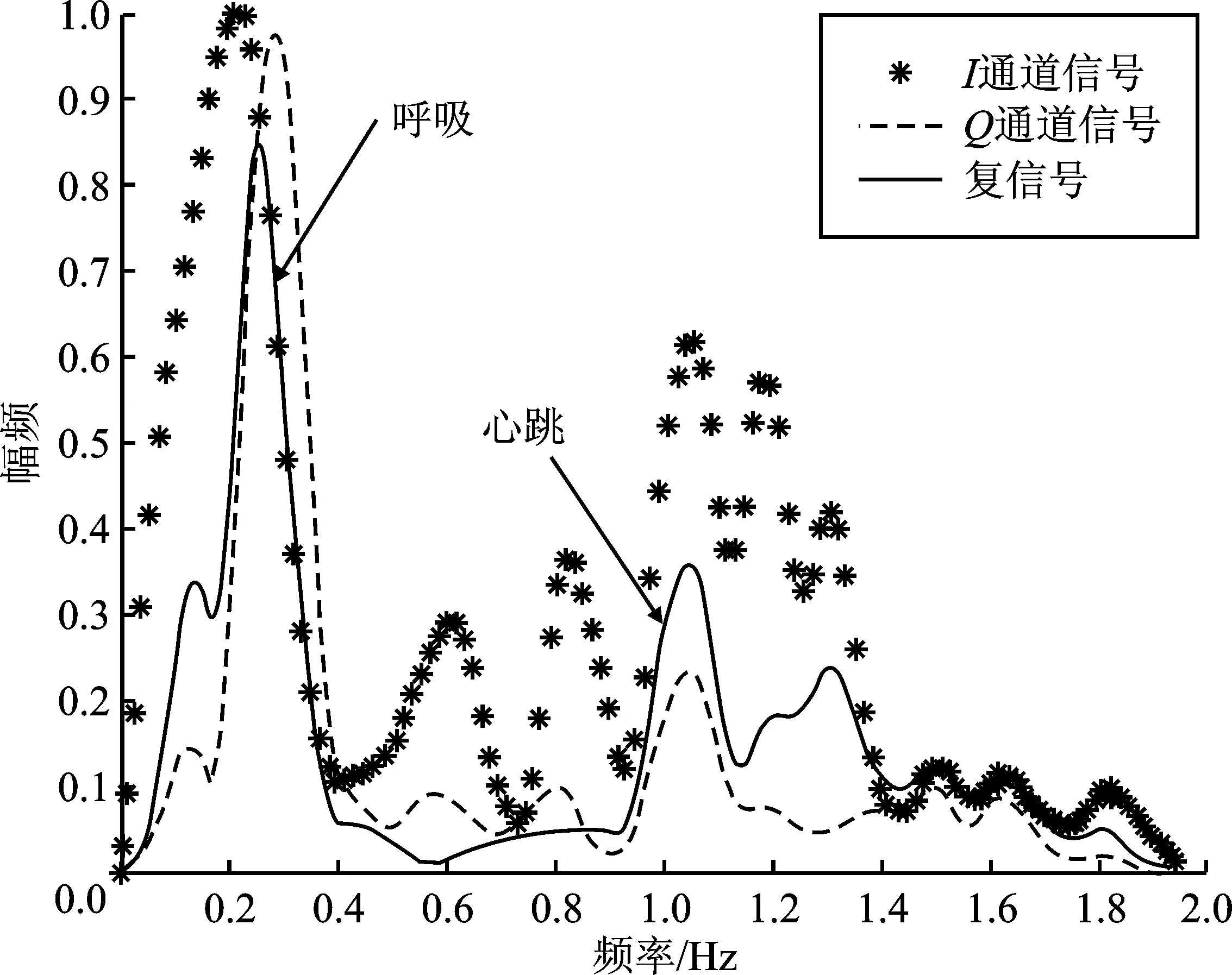
图5 雷达系统探测结果Figure 5. Detection result of radar system
4 结束语
本文针对探测对象为人体的应用场景,论述了单频连续波多普勒雷达生命体征探测的原理。同时论述了空探测点问题的原因及其解决方案,即复信号解调的技术原理,并在理论分析的基础上提出了一种系统实现方案。该系统由收发天线、射频模拟电路和数字信号处理系统3个单元组成,实现了系统模块化、小型化,克服了基带信号在小角近似过程中的空探测点问题,避免了直流偏移的问题,能够有效探测待测对象静态时的生命体征。但是在测量过程中,人体的随机运动对探测结果存在很大影响,因此性能仍有待进一步提升。后续将对射频系统中的载波对消、数字域随机运动的消除展开研究。
