自适应空域选择滤波分置阵列角度解模糊方法
2021-06-01姜婕
姜 婕
(西安导航技术研究所,陕西 西安 710068)
随着军用电子信息技术的迅猛发展,各种新型电子装备、电子对抗装备不断革新,雷达系统面临的战场环境也愈加恶劣,其对目标定位精度的要求也在不断提高[1-6]。为实现探测打击一体化及平台机动化等实际作战要求,需要保证雷达系统具备高可靠性、低成本、平台可机动、察打一体等特点[7-8],但是传统集中式阵列雷达已无法完全满足现如今的作战需求。
作为近年来学术界提出的一种新的雷达应用方式,分置阵列雷达因具有常规阵列雷达所不具备的优势,而受到广泛关注。分置阵列雷达由多个分散布置的小孔径子阵列雷达组成[9]。与常规阵列雷达相比,分置阵列具有明显的优势:(1)提高雷达系统的目标定位精度。分置阵列雷达与常规阵列雷达在阵元数相等的情况下相比,具有更大的天线阵列物理孔径。雷达天线阵列的物理孔径与目标定位精度密切相关,因此分置阵列雷达与常规阵列雷达相比目标定位精度更高;(2)提高雷达系统的机动性。由于分置阵列雷达的天线阵列由多个小孔径的天线子阵列组成,可将其布置在多个移动平台提高机动性,从而使分置阵列雷达拥有更强的战场生存能力;(3)降低雷达系统的成本并且降低天线阵列的工程实现复杂度。雷达天线阵列的阵元数越大,其工程实现的复杂度越大,雷达系统的软硬件成本也就越高。在天线阵列物理孔径相同的条件下,分置阵列雷达的阵元数通常远小于常规阵列雷达,其软硬件成本巧工程实现的复杂度也较小;(4)提高雷达系统的可靠性及稳定性。当分置雷达的部分阵元功能失效或出现故障时,分置阵列雷达仍可正常运行,从而大幅提高了雷达系统的可靠性及稳定性[10-13]。
分置阵列雷达可实现与载体平台表面共形,全阵列处理方法使得共形阵列的制造成本负担较重。在系统性能降低很少的情况下,子阵级处理有效降低了系统的复杂度并且节约了成本。当子阵按照长基线布置时,能够扩大阵列物理孔径,提高角度分辨率[14-15]。但由于阵面分置间距远大于波长,当两个分置阵面相参工作时,分置天线会在空间形成栅瓣;而当对目标进行捕获跟踪时,目标有可能会处在栅瓣或主瓣,角度会出现模糊,使得雷达跟踪性能下降。为了有效抑制栅瓣并解决角度模糊问题,本文利用自适应和差波束空域选择滤波的方法实现对分置阵列栅瓣的抑制,从而有效改善分置阵列目标定位过程中角度模糊的问题,使得雷达可以有效利用阵面资源,从而实现对目标真实角度的判断,并保证了雷达的稳定连续跟踪。
1 分置共形阵列雷达信号模型与方向图
分置阵列是常规相控阵阵列雷达进行分置布置的一种特殊形式,其波束形成基本原理与传统相控阵雷达相同。首先对传统相控阵方向图进行推导,对于阵元数为M且阵元间距为d的均匀阵列,不考虑噪声的影响,则第m个阵元的响应为
xm=gej(m-1)2πdsinθ/λ
(1)
其中,g为幅度。设第m个阵元的权值为wm,则该阵列经过加权后的输出为
(2)
式中,θ为入射信号的方向角。
对输出信号取绝对值并做归一化后可以得到方向图。
(3)
在均匀线阵的基础上,针对如图1所示的分置阵列,其由2个子阵构成,每个子阵均由m个单元组成,阵元间距为d,来波方向与法线方向的夹角为θ,波长为λ。
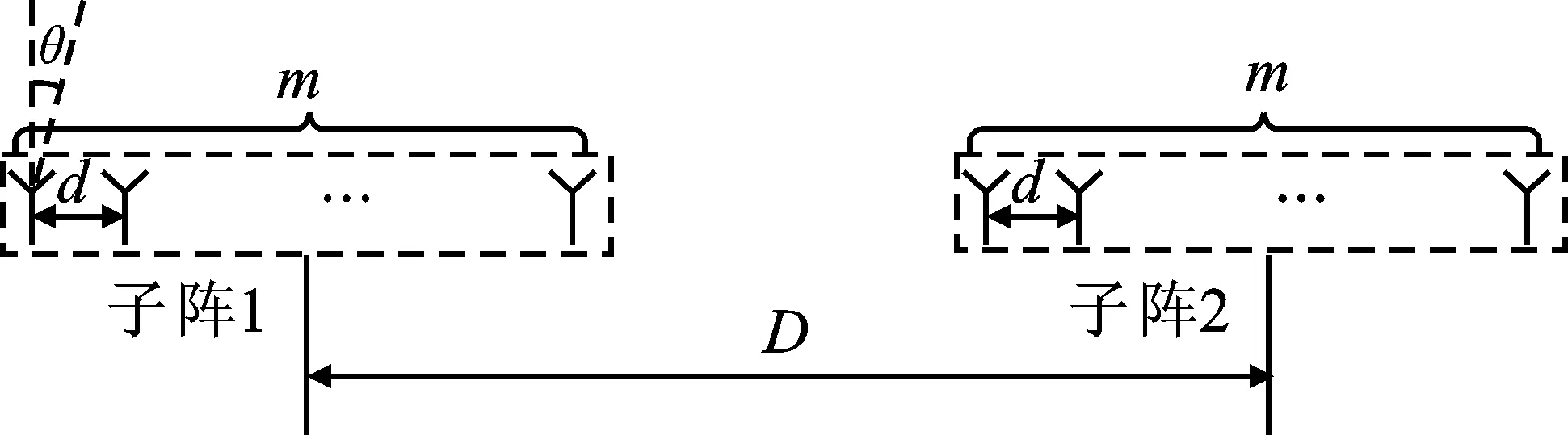
图1 阵列结构Figure 1. Array structure
当已知分置阵列的阵元位置,就可以得到其方向图。子阵2可以看作是子阵1的平移,子阵1的导向矢量为α1(θ),则子阵2的导向矢量为
(4)
式中,D为子阵1与子阵2间的基线距离,即两子阵相位中心的间距。进而可以推出该分置阵列在波束指向θd时经过加权后的输出为
(5)
其中,α=2πdsinθ/λ,αd=2πdsinθd/λ,同理可得分置阵列方向图为式(6)。
|cos(πk(sinθ-sinθd))·
(6)
设单子阵阵元个数为40,雷达工作在Ku频段,阵元间距d=λ/2,子阵间的基线距离阵面间距D为1.2 m,分置阵列方向图如图2所示。
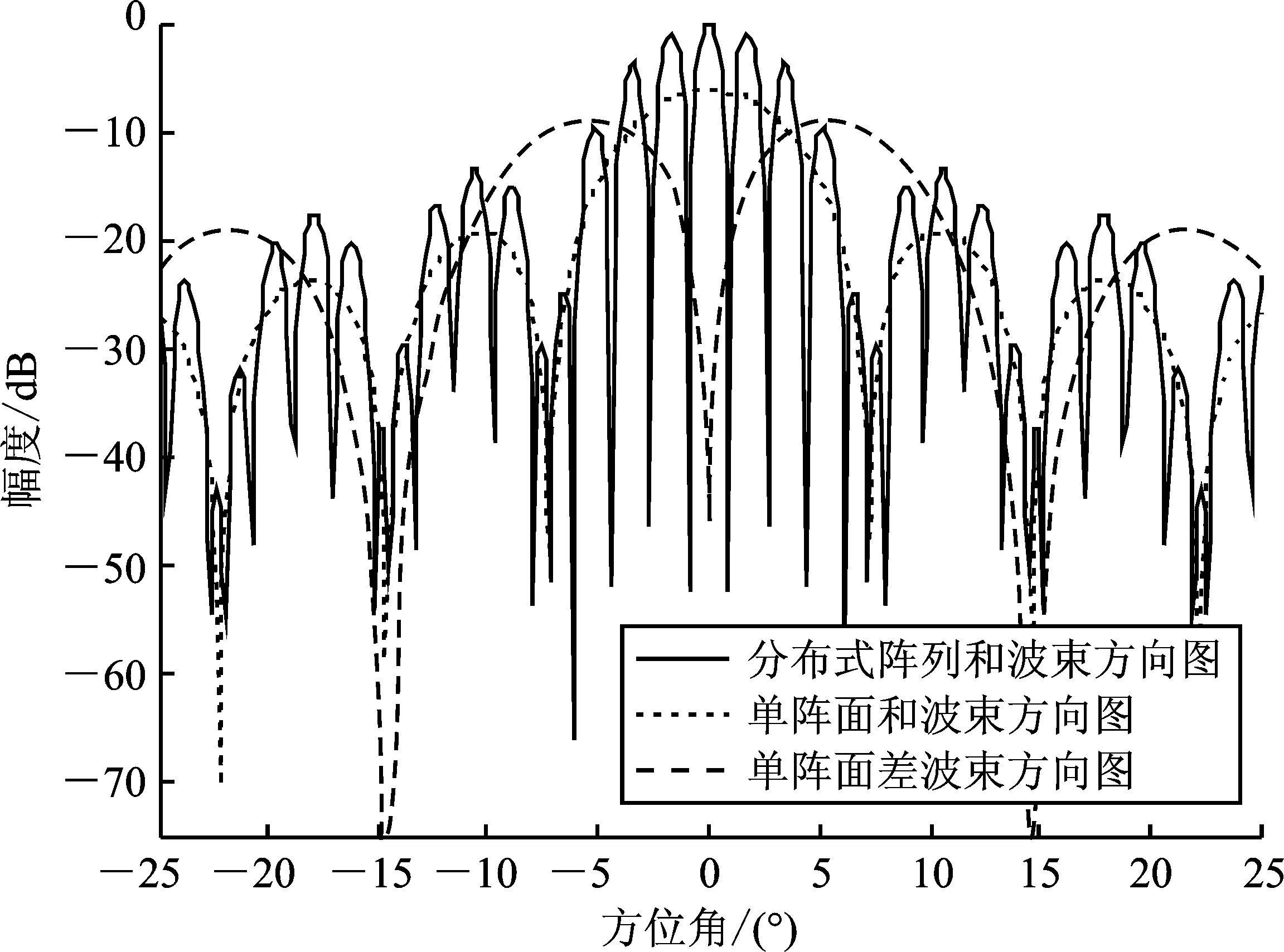
图2 分置阵列方向图Figure 2. Pattern of distributed array
由图2可以看出,当雷达阵面采用分置布置时,由于子阵间距拉大,雷达方向图主瓣位置出现大量的栅瓣,对目标跟踪将造成严重的影响。
2 分置共形阵列雷达角度解模糊方法
针对分置阵列雷达系统,当采用常规波束形成方法实现角度估计时,主瓣位置大量栅瓣的存在会造成角度模糊,故无法实现对目标角度的准确估计,进而影响雷达系统对目标的跟踪能力。为克服该问题并获得目标的准确角度估计,本文提出一种自适应和差波束空域选择滤波方法对分置雷达阵列方向图进行优化,从而实现对主瓣附近的栅瓣的有效抑制。
选择图1所示分置阵列结构模型展开介绍,以左侧子阵最左边阵元作为阵列原点,基于阵列波束方向图基础理论可得子阵1和子阵2的和波束方向图为Σ1(θ)和Σ2(θ),具体表示如下
(7)
以相同方法也可得子阵1和子阵2的差波束方向图函数为Δ1(θ)和Δ2(θ),具体表示如下所示
(8)
式中,k=D/λ;D表示子阵相位中心距;λ表示雷达发射波长。
为对主瓣附近的栅瓣进行有效抑制,基于单脉冲测角理论中和差波束综合可实现空域选择的特点,利用分置阵列中各个子阵的和差信号自适应的来构造空域选择滤波函数P(θ),对阵列雷达方向图进行优化,以保证目标角度可以被准确估计。滤波函数具体表示如式(9)所示。
(9)
采用本方法构建的滤波函数相当于在波束指向角度形成一个锥形滤波器,保证波束指向稳健的情况下滤除左右栅瓣。
基于上文分置阵列理论介绍可得常规分置阵列方向图为Σ(θ),具体表示如式(10)所示。
(10)
利用该空域选择滤波器对原分置阵列和波束方向图进行空域滤波处理得到栅瓣抑制后的方向图。
|P(θ)|=|P(θ)Σ(θ)|=
(11)
根据上述分置阵列模型参数进行仿真,两阵列和波束方向图与单阵面和差方向图如图2所示,构造出的空域选择滤波波束方向图如图3所示。由图3中可以看出栅瓣均已被抑制掉,因此利用该方法可以解决角度模糊问题。
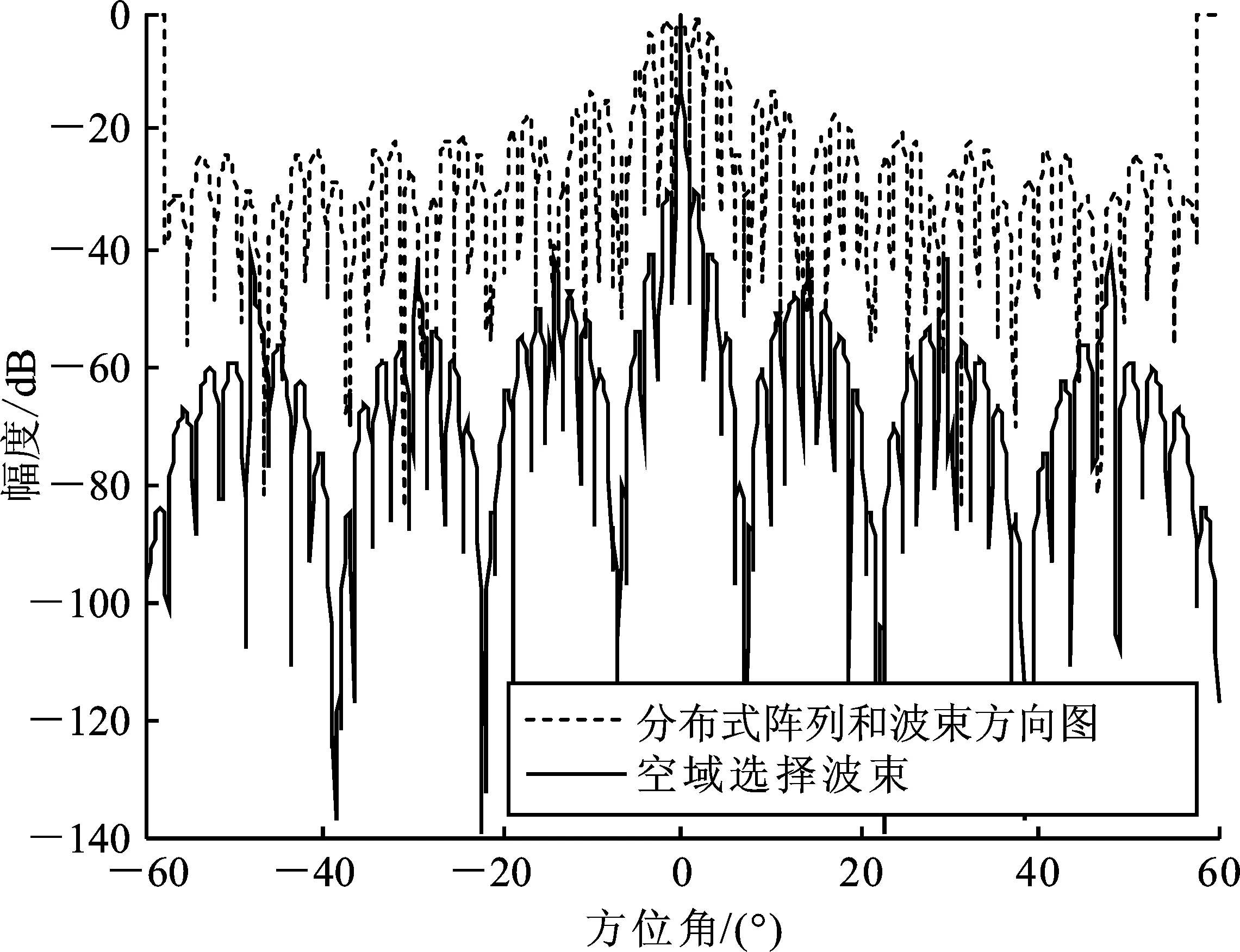
图3 空域选择滤波波束方向图Figure 3. Spatial selective filtering beam pattern
3 实验及分析
分置阵列雷达可满足探测打击平台一体化的实际需求。本文所提出的方法主要改善分置阵列雷达所产生的栅瓣对目标角度跟踪性能的影响。利用分置阵列对机动目标进行跟踪时,在波束形成处理中,利用单阵列和差波束构成空域滤波系数,并利用该系数进行波束形成处理[16-17]。利用现有分置阵列雷达设备展开试验验证,分别对实际设备方向图与动目标跟踪性能进行测试与试验验证,以证明本文所提出方法的有效性与工程应用价值。
3.1 实测方向图
为验证本文所提出的方法在栅瓣抑制上的实际效果,利用现有分置设备,对其接收方向图进行测试。试验所用分置阵列雷达模拟平台如图4所示,分置阵列为左右两相控阵雷达拉开一定距离,实现阵面孔径的扩大,并保证实际需求中的平台共型需求。在接收端利用左右阵面和差信号构造空域选择滤波波束,从而实现对栅瓣的抑制,获得目标的真实角度信息,保证雷达对目标跟踪的连续性与稳定性。
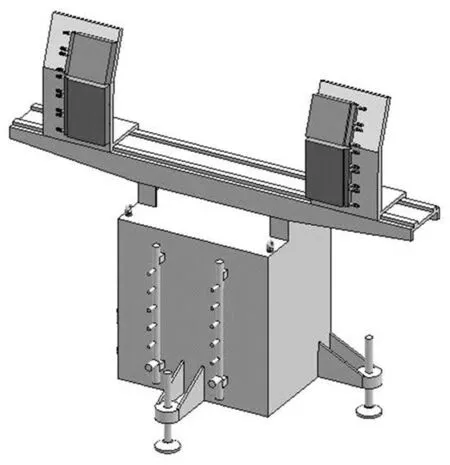
图4 分置阵面模拟平台Figure 4. Distributed array simulation platform
利用微波暗室对现有分置雷达设备的接收方向图进行测试,信号源在阵面指向法线方向,不利用本文所提出的方法进行处理的方向图如图5所示。可以看出,阵列分置布置造成在信号指向附近大量的栅瓣,从而使雷达系统无法准确的对目标角度进行解算。图6为利用本方法处理后的阵面方向图,可以看出在信号源雷达主波束方向的栅瓣得到了较好的抑制,同时方向图主波束3 dB宽度小于1°,经空域选择滤波后主瓣保型能力较好,可保证在跟踪阶段良好的目标角度信息解算。
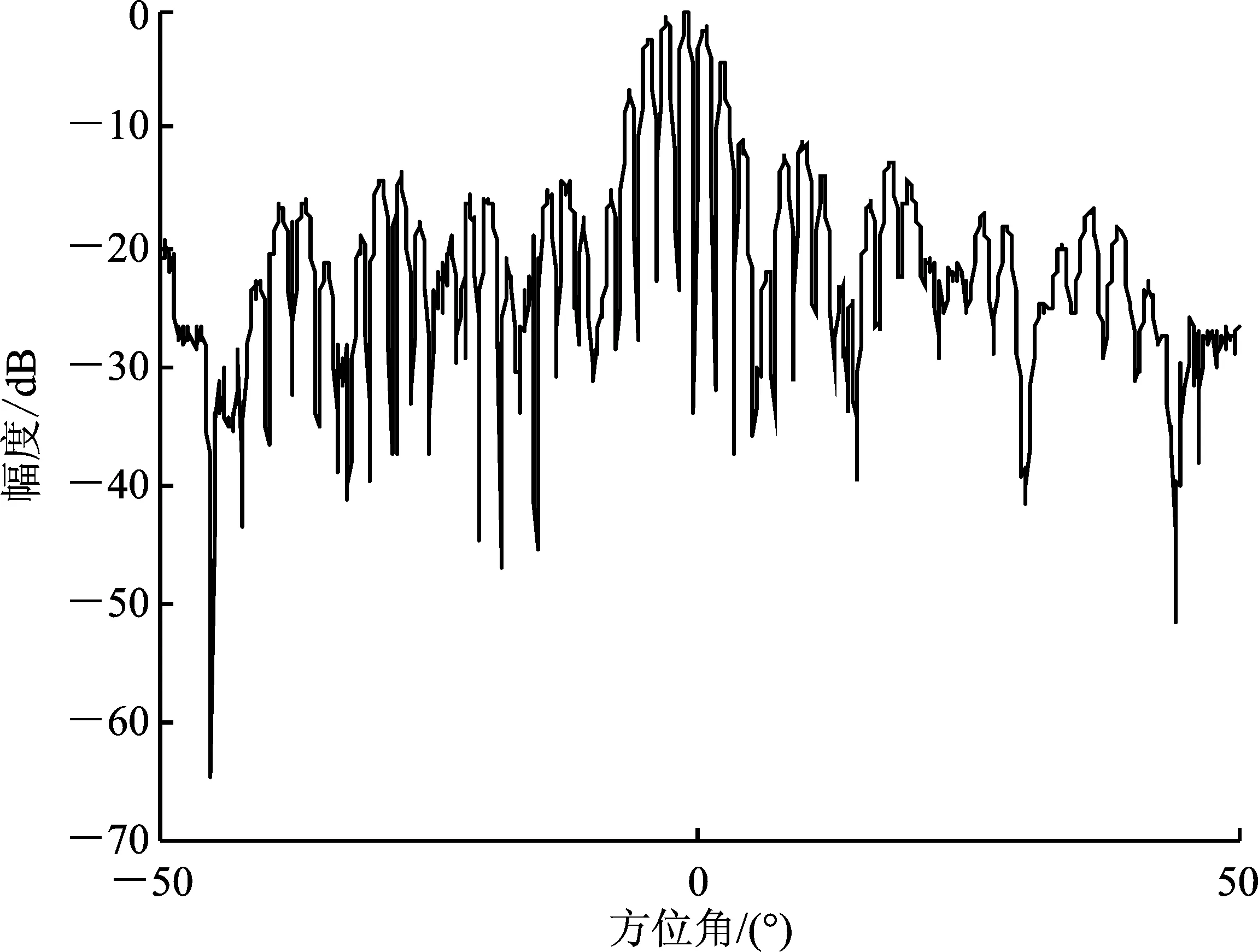
图5 分置阵列和波束方向图Figure 5. Distributed array and beam pattern
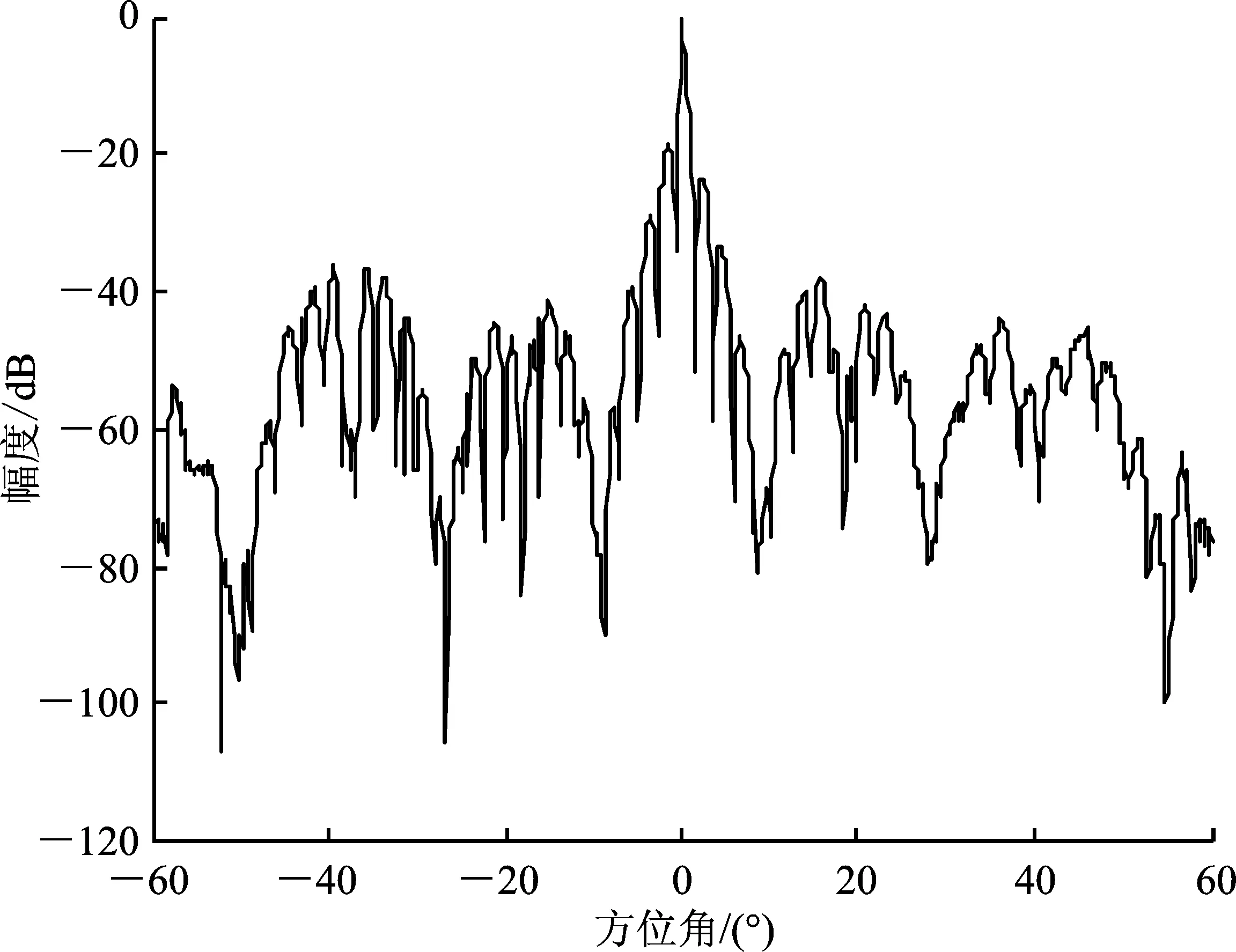
图6 空域选择滤波波束方向图Figure 6. Spatial selective filtering beam pattern
3.2 性能测试
在微波暗室测试方向图的基础上,为验证本文所提出的方法在实际应用的能力,利用分置阵列雷达系统展开外场试验,验证其对动目标的有效跟踪能力。
在外场实验中,将整个雷达测试平台固定在地面高台上,利用分置雷达阵面对远处火箭橇轨道旁行驶的机动车辆进行扫描,完成对机动目标的搜索及跟踪,试验场景与分布如图7所示。在试验过程中,轨道上的小轿车驶向远处,相当于一个远离的机动目标,但在行驶途中与一辆远处驶来的农用三轮车会车交汇。雷达于约510 m发现该小轿车,并成功捕获,一直跟踪到约2.2 km处停止跟踪,跟踪到小轿车时其行驶速度约为2.8 m·s-1,行驶途中与一辆农用三轮车会车小轿车减速,随后又加速行驶。

(a)
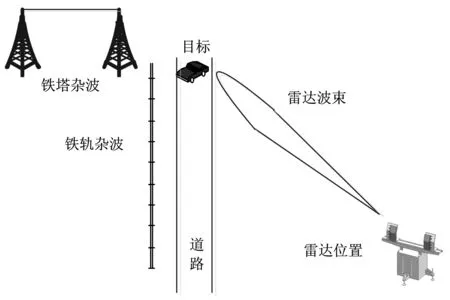
(b)图7 试验场景描述图(a)试验实际场景图 (b)几何关系示意图Figure 7. Test scenario description(a) Actual scene of test (b) Geometry diagram
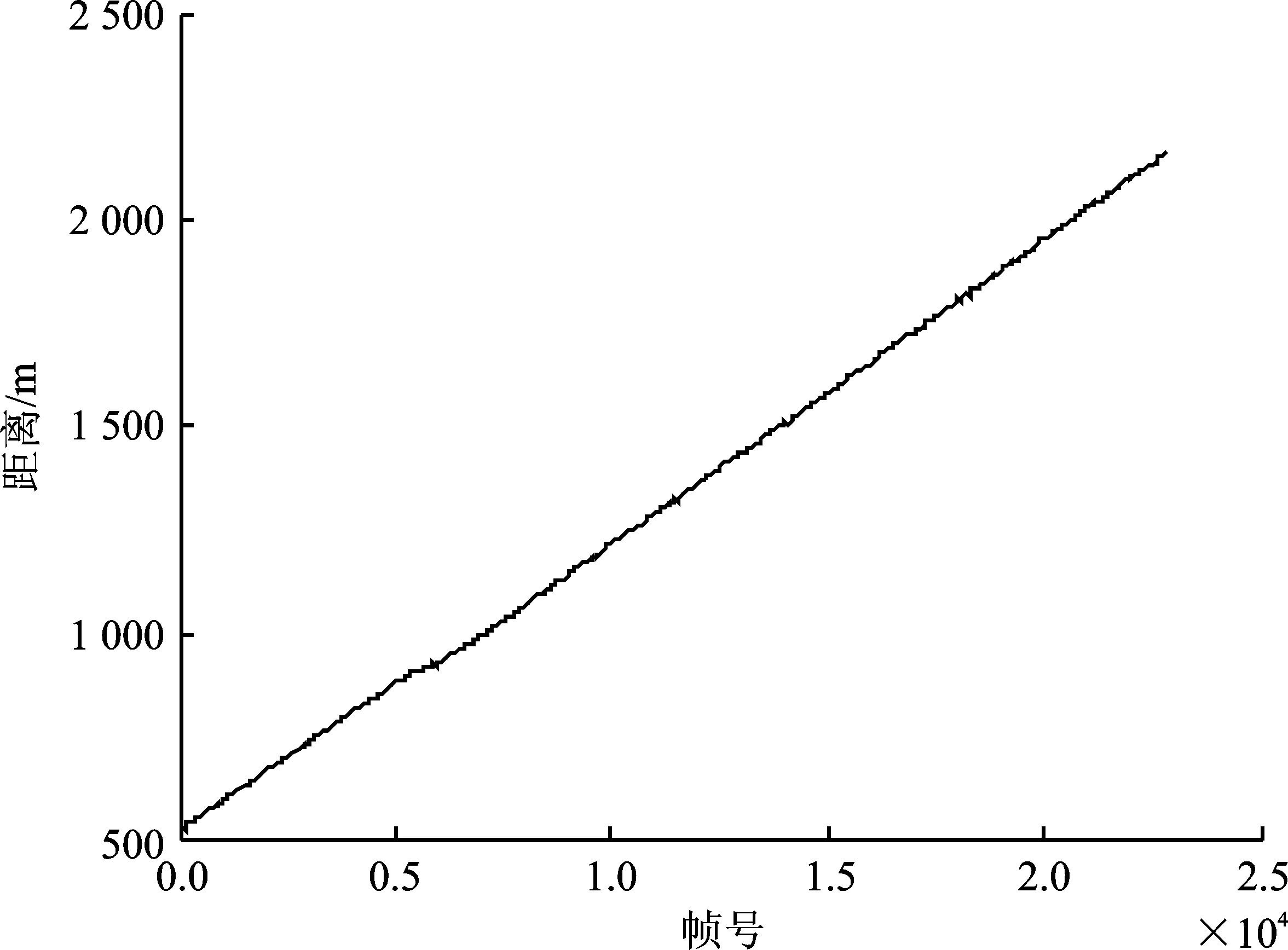
图8 小轿车跟踪距离Figure 8. Car tracking distance
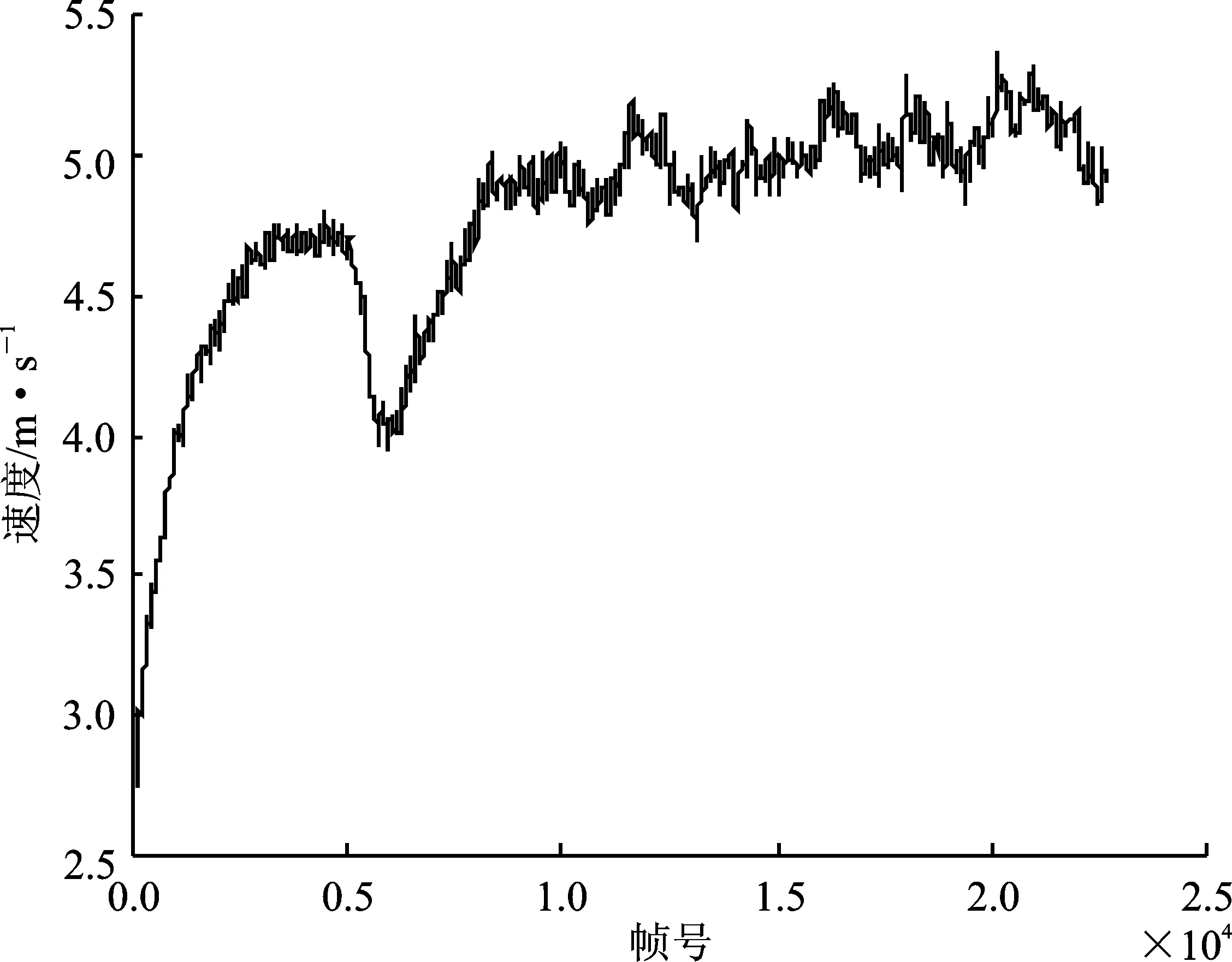
图9 小轿车跟踪速度Figure 9. Car tracking speed
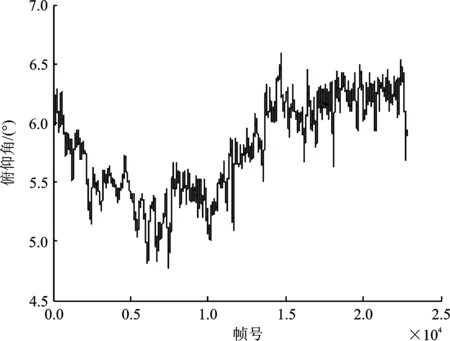
图10 小轿车跟踪俯仰角Figure 10. Car tracking pitch angle

图11 小轿车跟踪方位角Figure 11. Car tracking azimuth
图8~图11分别为跟踪过程中的目标距离、速度、俯仰角度、方位角度信息。在本次实验中,由于试验场景相对复杂,因此需要雷达系统角度分辨能力较强,以实现主波束内尽量少的杂波进入。通过对雷达跟踪目标过程中各项数据的分析可以看出,在距离上,雷达可以有效地实现对目标的稳定跟踪;在速度上,可以看出速度变化符合试验的实际场景的描述。从相控阵目标角度的跟踪数据可以看出,采用本文所提出的方法可以稳定的对目标进行跟踪,并不受地物杂波的影响。
4 结束语
分置阵列雷达在实际应用中会因栅瓣影响造成角度模糊,由此导致目标跟踪性能下降。针对该问题,本文提出了一种利用自适应和差波束空域选择滤波的方法对栅瓣进行抑制,消除存在的角度模糊,保证了目标跟踪的稳定性与连续性。本文利用现有分置雷达设备对其分别进行了暗室方向图测试与外场目标跟踪试验。结果表明本方法可有效改善分置雷达系统的目标跟踪性能,并且具有较高的工程可实现性,可有效提升分置阵列实际应用的可行性。
