一种改进载波相位恢复算法*
2021-05-31梅如如胡婉如王竹刚
梅如如**,2,胡婉如,2,王竹刚
(1.中国科学院 国家空间科学中心 北京 100190;2.中国科学院大学 北京 100049)
0 引 言
当数字通信接收机采用相干解调时,接收端需要提供一个和发射端调制载波同频同相的相干载波[1]。然而,数字信号在传输过程中,由于系统本振频率误差和多普勒效应等各种原因会导致数字下变频输出的载波发生频偏和相偏,进而导致接收信号发生旋转和抖动[2-4]。因此,需要采用载波恢复技术纠正接收端载波和发送端载波之间的频偏和相偏。载波恢复可分为载波频率恢复和载波相位恢复两个部分。信号进行载波频率恢复后仍存在剩余频偏和剩余相偏,因此,需要进行载波相位恢复[5-6]。载波相位恢复技术依据是否借助训练序列或导频辅助可分为数据辅助(Data Aided,DA)、非数据辅助(Non-data Aided,NDA)两大类[7-8],本文主要是基于NDA算法进行研究。
常用的NDA载波相位恢复算法有判决导向(Decision Directed,DD)算法、极性判决(Polar Decision,PD)算法和基于Q次方的极性环。其中,DD算法采用全星座判决,能够有效消除加性噪声,稳态跟踪能力好,但频偏捕获能力小,通常小于10 kHz[9]。为了进一步改善频偏捕获能力,加入功率检测模块的PD算法被提出,然而该算法对于正交相移键控(Quadrature Phase Shift Keying,QPSK)、8相移键控(8 Phase Shift Keying,8PSK)、16幅度相移键控(16 Amplitude Phase Shift Keying,16APSK)等等幅调制信号并不能起到很好的作用。基于Q次方的极性环是对信号进行Q次方处理,使得信号星座收敛后,再进行判决,简化了算法的时间,增加了可靠性,然而其受噪声影响较严重,降低了算法的相偏恢复性能[10]。因此,为了使载波相位恢复算法既能捕获大的频偏,又能进行稳定的跟踪以及有高的相偏恢复性能,2016年,吴凤辉[1]提出了DD算法和鉴频鉴相(Phase and Frequency Discrimination,PFD)算法相结合的载波相位恢复算法,但是该算法需要加入一种用于保证两种算法的正确切换的模式转换算法,会增加算法的复杂度。同年,朱诗兵[11]提出了基于Q次方的极性环和DD算法相结合的载波相位恢复算法,该算法同样需要进行模式切换,增加算法的复杂度。为此,本文提出了一种基于Q次方的极性环与极性判决算法相结合的Q次方极性判决(Q-th Power Polarity Decision,QPD)算法。该算法频偏捕获范围更大,相位恢复性能更好,且适用于QPSK、8PSK、16APSK和32幅度相移键控(32 Amplitude Phase Shift Keying,32APSK)等等幅调制信号。
1 载波相位恢复算法分析
图1所示为一种常见的载波相位恢复环路结构[12],其中DD算法、PD算法和基于Q次方的极性环均采用这种结构。

图1 载波相位恢复环路结构
从图1中可以看出,载波相位恢复环路主要由相位估计、环路滤波器和数控振荡器(Numerically Controlled Oscillator,NCO)构成。其中相位估计是载波相位恢复环路中最关键的部分,不同相位估计主要采取不同的鉴相方法提取载波剩余相偏;环路滤波器用于滤除信号中的噪声和其他高频分量,产生稳定的相偏信号;NCO模块则是根据相偏的大小调整正弦波与余弦波频率,对原始信号做补偿。
1.1 DD算法
DD算法的原理是将接收的信号根据最小距离准则判决到最近的理想星座点上,然后比较接收信号和理想星座点,把两者之间的相位差值作为相位误差信号。它能有效地消除加性噪声,适用于所有形式的星座图,但是当残留频偏和相偏过大时,误码率增大,会导致相偏估计不准确。此外,相同的误差下,高阶调制时,星座图点数增加使得正确判决难度增大,也会增加相偏估计的错误率。DD算法的实现框图如图2所示。

图2 DD算法实现框图
在如图2所示的DD算法的实现框图中,y(k)是接收端信号,q(k)是判决器输入信号,q′(k)是判决器输出信号。DD算法的数学推导如下:
在不考虑噪声的情况下,假设判决器输入信号q(k)和判决器输出信号q′(k)为
q(k)=rej(2πf1Ts+θ1)=
r{cos(2πf1Ts+θ1)+jsin(2πf1Ts+θ1)},
(1)
q′(k)=rej(2πf2Ts+θ2)=
r{cos(2πf2Ts+θ2)+jsin(2πf2Ts+θ2)}。
(2)
式中:Ts为符号速率,r是q点和q′点的半径,f1和f2分别是q点和q′点的频率,θ1和θ2分别是q点和q′点的相角。
则相位检测的结果可表示为

sin(2π(f1-f2)Ts+(θ1-θ2))。
(3)
因为sinc2π(f1-f2)Ts+(θ1-θ2))是一个很小的值,所以该正弦值可近似为其相角的值,即
sin(2π(f1-f2)Ts+(θ1-θ2))≈2π(f1-f2)Ts+(θ1-θ2),
(4)
(5)
ψ(k)即为获得的相偏信号,将其送入环路滤波器,然后送进NCO。NCO模块包括一个相位累加器和一个正弦表,构成了数字锁相环。
1.2 PD算法
PD算法是在DD算法的基础上发展得来的。在PD算法中,不用对星座图上所有符号进行判决,只需要对信号中一些符合条件的星座点进行判决。相比于DD算法,PD算法有更强的频偏捕获能力,健壮性也更好,十分适合用于幅度不固定的调制信号,例如正交幅度调制(Quadrature Amplitude Modulation,QAM)信号。然而,对于QPSK、8PSK、16APSK等等幅信号,PD算法并不能起到很好的作用。PD算法的实现框图如图3所示,其中y(k)是接收端信号,q(k)是用于功率检测的信号,p(k)是经过极性判决后的输出信号。

图3 PD算法实现框图
从图3中可以看出,PD算法实现时,首先对接收端信号进行功率检测,允许功率大的符号进行极性判决,功率低的符号不用于计算相偏。其中极性判决是将接收到的符号判决为其所在象限的对角线上的符号。
图4是256QAM情况下第一象限的极性判决解析图。

图4 极性判决解析图
当对图4中的q点进行判决时,假设q点的极坐标形式为
q(k)=r(cosθk+jsinθk)。
(6)
式中:r是q点的半径,θk是q点的相角。
首先经过功率检测,假设功率门限为α,则需要判断q点的功率是否大于门限α,即是否满足
r2>α2。
(7)
由于q点的功率大于门限α,满足上式,因此可以进行极性判决。此时,q点被判决为距离其最近的对角线上的点,即图4中的p点。p点的极坐标形式可表示为
p(k)=A(cos(π/4)+jsin(π/4))。
(8)
式中:A是p点的半径,π/4是p点的相角。
经过极性判决后,q点和p点输入到鉴相器,进行相偏检测。在相偏检测中,采用的方法与DD算法的检测方法一致,即取虚部检测。因此,PD算法的相偏检测公式如下:


(9)
1.3 基于Q次方的极性环
基于Q次方的极性环使得星座图收敛,简化了算法的时间,增加了可靠性,然而星座图收敛后,有些星座点的半径很小,受噪声影响严重,利用这些星座点进行判决,会降低算法的频偏恢复性能。DD算法的实现框图如图5所示。

图5 基于Q次方的极性环实现框图
从图5中可以看出,基于Q次方的极性环实现时,首先对相偏补偿后的信号进行Q次方运算和相位旋转,得到信号z(k)为
z(k)=[q(k)]Qejβ。
(10)
式中:q(k)是相偏补偿后的信号,Q为幂运算的阶数,β是相位旋转的角度。
该算法对于不同调制信号的幂运算的阶数Q和相位旋转的角度β有明确的规定。在QPSK调制中,Q为1,β为0;在8PSK调制中,Q为2,β为π/4;在16APSK调制中,Q为3,β为0;在32APSK调制中,Q为4,β为π/4。如图6所示,除QPSK调制外,8PSK调制、16APSK调制和32APSK调制经过Q次方和相位旋转处理后星座图都有一定程度的收敛,转化为类QPSK调制的星座图。

图6 Q次方和相位旋转处理前后信号星座图对比
随后,对完成Q次方运算和相位旋转的信号z(k)进行相偏检测,即取虚部检测,公式如下:
ψ(k)=Im{z(k)[sign(Re{z(k)})-jsign(Im{z(k)})]}。
(11)
式中:sign()为符号函数。从式(11)中可以看出,该算法对信号进行相偏检测即为求信号z(k)与其所在象限的对角线上的星座点的相位差。
1.4 QPD算法
DD算法的估计精度高,但频偏捕获范围小;PD算法提高了频偏捕获范围,但不适用于QPSK、8PSK、16APSK等幅调制信号;基于Q次方的极性环对信号进行Q次方运算和相位旋转后,内圆星座点的半径很小,受噪声影响严重,降低了算法的相偏恢复性能。因此,本文基于频偏捕获范围、估计精度和调制方式等方面考虑,提出QPD算法。该算法首先对信号进行Q次方运算和相位旋转,再进行功率判决,选取旋转后功率较大的信号进行极性判决,最后进行相偏计算。因此,该算法解决了PD算法对QPSK、8PSK等等幅信号的局限性,同时相比于基于Q次方的极性环,提高了算法的抗噪性。QPD算法的实现框图如图7所示。

图7 QPD算法实现框图
从图7中可以看出,QPD算法实现时,首先对相偏补偿后的信号q(k)进行Q次方运算和相位旋转,得到信号z(k)为
z(k)=[q(k)]Qejβ。
(12)
式中:Q为幂运算的阶数,β是相位旋转的角度。
随后,经过功率检测后筛选出外圆的点进行判决,假设判决出的点z′(k)为p(k)的Q次方运算和相位旋转β后的结果,可表示为
z′(k)=[p(k)]Qejβ。
(13)
假设q点的极坐标形式为
q(k)=r(cosθk+jsinθk)。
(14)
式中:r是q点的半径,θk是q点的相角。
假设p点的极坐标形式为
p(k)=A(cos(θk′)+jsin(θk′))。
(15)
相偏检测采取虚部检测,其公式如下:
(16)
式中:

(17)
由上式可知,相偏为极性判决后相偏的1/Q,因此QPD算法的相偏检测公式为
(18)
式中:Q为幂运算的阶数。
该载波相位恢复算法中,Q次方和相位旋转的处理只是对信号的星座图做了收缩处理,该相位补偿环路中所能补偿的最大残留频偏主要由极性判决算法所决定。因此,该算法频偏捕获范围大,估计精度高,且适用于多种调制方式。
2 载波恢复算法仿真与实现结果
2.1 不同载波相位恢复算法性能分析
为验证改进算法在数字通信系统的相偏补偿性能,对DD算法、PD算法、基于Q次方的极性环和QPD算法进行仿真。采用16APSK调制方式,信道为典型高斯白噪声信道,符号速率为250 MHz,初始相偏为5°。
在16 dB信噪比、30 kHz残余频偏下,对应无载波相位恢复和采取不同载波相位恢复算法的信号星座图如图8所示。

图8 信号星座图
从图8(a)中可以看出,发射信号在传输过程中受到了噪声、多普勒效应等诸多因素的干扰,产生了频率和相位偏移,使得其星座图不断旋转,且偏转一定的角度。从图8(b)~(e)可以看出,经过相位恢复后的信号补偿了频偏和相偏,星座图较为集中,效果远好于未采取相位恢复算法的信号。其中,QPD算法同步后的信号星座图收敛情况最好,PD算法和DD算法收敛情况相近,基于Q次方的极性环最差,仍存在相位偏移。
为验证载波残余频偏对不同载波相位恢复算法性能的影响,基于前面的仿真条件,在不同载波频偏的情况下,仿真四种算法对16APSK调制信号相偏的补偿效果,得到无载波相位恢复和不同载波相位恢复算法在不同频偏下的误码率曲线,如图9(a)所示。同时,为验证噪声对QPD算法性能的影响,基于前面的仿真条件,在不同信噪比条件的情况下,仿真该算法对16APSK调制信号相偏的补偿效果,得到误码率曲线如图9(b)所示。

(a)输入信号载波频偏对不同算法误码率影响
由图9(a)可知,加相位恢复算法误码率性能优于无相位恢复算法误码率性能,且在频偏小于20 kHz的情况下,基于Q次方的极性环和DD算法误码率性能略优于QPD算法误码率性能;PD算法误码率性能较差,并不适用于16APSK调制。在频偏大于20 kHz、小于80 kHz的情况下,QPD算法误码率性能远优于其余算法误码率性能。当频偏大于80 kHz时,所有算法误码率都较大,均不适用。因此,QPD算法可捕获的频偏范围最大,载波相位恢复效果最好。
由图9(b)可知,在30 kHz频偏下,DD、PD、基于Q次方的极性环这三种算法在不同信噪比下相位恢复效果均不理想。而对于QPD算法,当信噪比小于14 dB时,载波相位恢复效果也不理想;但随着信噪比逐渐增大,QPD算法相比于DD、PD和基于Q次方的极性环这三种算法性能有极大的改善,在信噪比为24 dB时,其他三种算法性能几乎没有大的改善,而QPD算法误码率降低为0。由此可知,QPD算法性能优于DD算法、PD算法和基于Q次方的极性环。
2.2 不同调制方式下QPD算法性能分析
为验证不同调制方式对QPD算法性能的影响,基于前面的仿真条件,在信噪比为25 dB的情况下,仿真该算法对QPSK、8PSK、16APSK、32APSK四种调制信号相偏的补偿效果,对应无载波相位恢复和采取QPD算法的QPSK、8PSK、16APSK、32APSK调制星座图,如图10所示。同时,在不同载波频偏的情况下,仿真QPD算法对QPSK、8PSK、16APSK、32APSK四种调制信号相偏的补偿效果,得到四种调制信号在不同频偏下的误码率曲线,如图11所示。
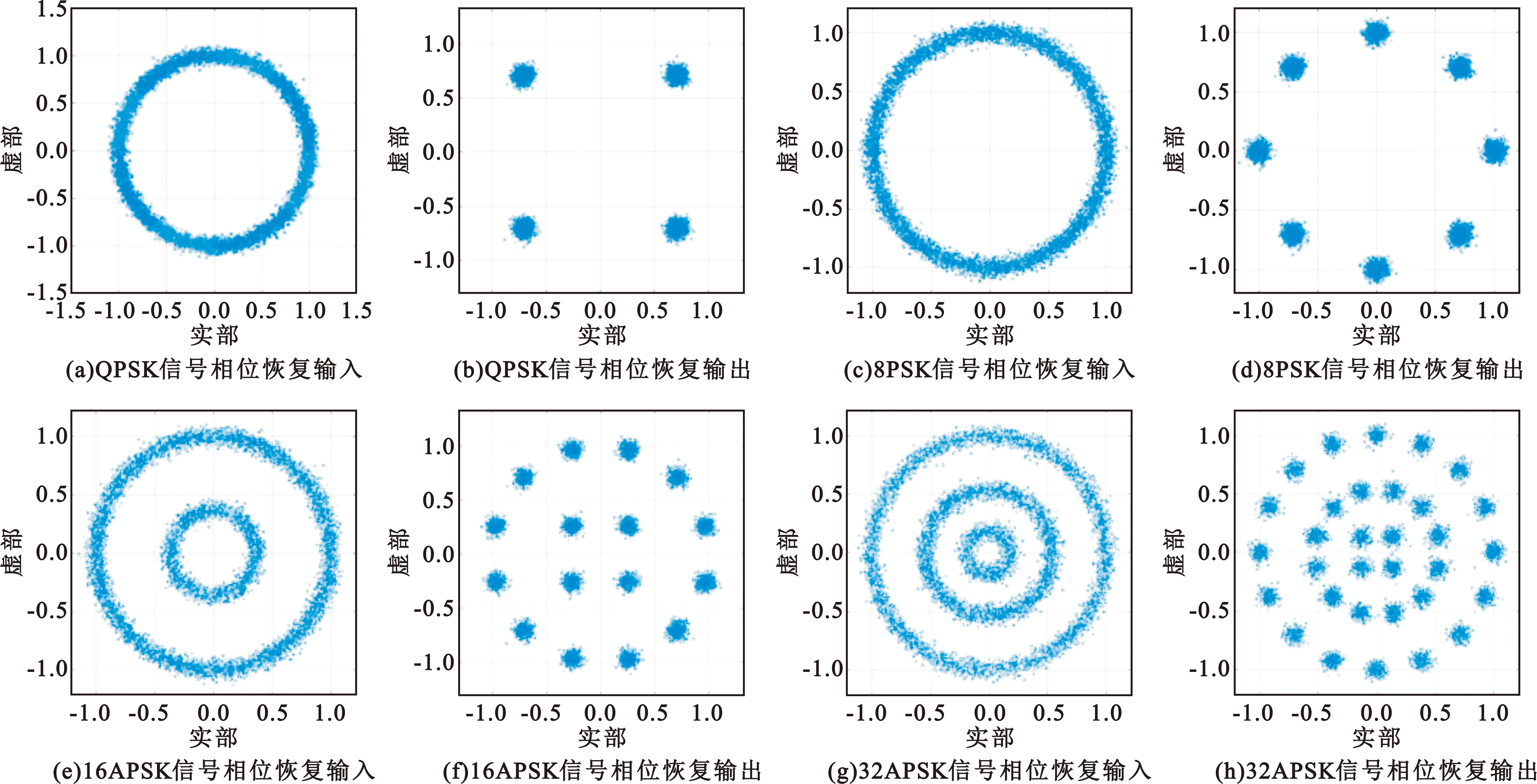
图10 信号星座图

图11 QPD算法对四种调制信号相偏的补偿效果
从图10中可以看出,在25 dB信噪比、30 kHz频偏下,QPD算法恢复后的QPSK、8PSK、16APSK和32APSK调制信号星座图收敛情况均很好,可以很好地补偿QPSK、8PSK、16APSK和32APSK调制的相偏。
由图11可知,在25 dB信噪比下,对于QPSK、8PSK、16APSK调制,QPD算法在1~100 kHz频偏下的误码率均为0,相偏补偿效果非常好;对于32PSK调制,QPD算法在1~100 kHz频偏下的误码率约为0.000 3,相偏补偿效果较好。因此,QPD算法适用于QPSK、8PSK、16APSK和32APSK调制。
2.3 QPD载波相位恢复模块实现
在QPSK、8PSK、16APSK和32APSK调制下的 QPD载波相位恢复算法实现的资源消耗情况、吞吐率情况如表1所示。

表1 不同调制方式下QPD算法的资源消耗和吞吐率
由表1可知,在QPSK、8PSK、16APSK、32APSK调制下,QPD算法的资源消耗均在可接受范围内,可在符号速率为250 MHz的条件下工作。
3 结束语
由于载波频率恢复后的信号仍存在剩余频偏和剩余相偏,一般需要进行载波相位恢复。为解决现有NDA载波相位恢复算法存在捕获范围小、抗噪性能差、不适合等幅调制方式等方面的局限性,本文提出了一种基于Q次方的极性环与PD算法相结合的载波相位恢复算法。该算法相比于基于Q次方的极性环,提高了频偏捕获范围和抗噪性;相比于PD算法,可适用于QPSK、8PSK、16APSK等等幅调制方式;相比于DD算法,提高了频偏捕获范围。分析不同调制方式下的资源消耗和吞吐率可知,QPD算法具有资源消耗较少、吞吐率较高的特点。接下来将进一步提高该算法实现的吞吐率,降低该算法实现的资源消耗。
