基于动压约束的高超声速飞行器机动突防制导策略
2021-05-27李新三汪立新刘洁瑜
罗 哲,李新三,汪立新,刘洁瑜,沈 强,薛 亮
(火箭军工程大学导弹工程学院,西安 710025)
高超声速飞行器具有良好的气动外形,飞行速度一般大于5 Ma,一类高超声速飞行器是以吸气式发动机为动力,另一类通常采用助推-滑翔方式。高超声速飞行器可以在很宽的空域内机动飞行,具有响应速度快、机动能力强等特点,能够对全球或超远程目标实施快速精确打击。高超声速飞行器必然对未来战争的作战模式产生深远影响,发展高超声速技术已经成为世界各国战略安全的重要保证。
随着弹道导弹防御体系的不断发展和完善,传统的弹道导弹成功突防面临的挑战越来越严峻。与传统的弹道导弹相比,高超声速飞行器具有更强的机动能力,而如何提高高超声速飞行器的突防能力已引起国内外专家学者的关注[1,2]。当前得以应用的突防手段主要包括:隐身、电子对抗、程序机动等技术。高超声速飞行器通过机动飞行既可以增加反导系统对其飞行轨迹的预测难度,也可以躲避拦截弹的拦截。目前,比较成熟的程序机动模式主要包括:S 形机动、摆动式机动、螺旋机动和跳跃机动等[3,4]。针对程序机动方法,相关专家已开始有针对性地改进拦截导弹的拦截制导律。为了弥补程序机动的不足,国内外学者运用最优理论、智能算法和微分对策理论等方法对飞行器的机动突防制导方法进行改进[5-10]。
不同于已有的机动突防制导方法,本文针对高超声速飞行器临近空间机动突防制导问题,基于模型预测静态规划(Model Predictive Static Programming,MPSP)制导方法[11,12],提出一种基于最低动压约束(Dynamic Pressure Constraint,DPC)的高超声速飞行器非程序自主机动制导策略。高超声速飞行器根据战场态势规划临近空间航路点,对临近空间航路点处的动压进行约束,通过航路点处动压约束在线调节临近空间飞行轨迹的形状,实现高超声速飞行器临近空间自主非程序大空域机动飞行。本文采用基于动压约束非程序机动突防策略主要从以下几个方面综合考虑:第一,高超声速飞行器采用气动操纵方式在临近空间机动飞行时,须满足气动操纵所需的最低动压约束条件;第二,恒定的动压条件下,推进系统的工作性能比较稳定;第三,对临近空间航路点处动压进行实时调节,根据战场攻防态势实时改变临近空间飞行轨迹的形状,增强高超声速飞行器的自主机动突防能力。
MPSP 制导方法是由印度学者Padhi 等人[11,12]提出来的。该方法采用静态协态变量求解最优控制问题,算法的实时性较好,已广泛用于解决高超声速飞行器制导控制问题[13,14]。本文主要从以下三个方面对MPSP 制导方法进行改进:第一,末端时刻输出量考虑末端时刻时间偏差的影响;第二,性能指标函数中考虑控制量输入约束的影响;第三,同时考虑多个航路点约束以及末端约束,已有的MPSP 制导方法只能解决带末端约束的制导问题。采用改进后的MPSP 制导方法对高超声速飞行器临近空间飞行航路点处的动压进行约束,在实现飞行器临近空间大空域机动飞行的同时,满足气动操纵所需的最低动压条件和推进系统稳定工作条件。
1 MPSP 制导方法
对于一般形式的非线性系统,其离散形式的状态方程和输出方程如下:

其中,

取如下性能泛函:


第k步更新的控制指令为:

其中,
2 控制量输入受限MPSP 制导方法
传统的MPSP 制导方法没有考虑末端时刻时间偏差对末端时刻输出量的影响,也没有考虑控制指令输入约束的影响,本节对MPSP 制导方法进行改进,推导得到考虑末端时刻时间偏差和控制指令输入受限时的MPSP 制导方法。
2.1 考虑末端时刻时间偏差
考虑末端时刻时间偏差ftΔ 的影响,末端时刻输 出量偏差泰勒级数展开后忽略高阶项影响,有:

考虑如下性能泛函:

2.2 控制量约束处理
考虑以下形式控制指令不等式约束条件:

式(12)(13)和式(15)构成了一个静态优化问题。考虑控制指令约束,广义性能泛函为:
2.3 控制指令求解
运用最优化理论,可以分别得到式(18)(19)和(20):
由式(18)得:
由式(19)得:

将式(21)(22)代入式(12),得:
式(23)可写成如下形式:

其中,
由式(24)得:

结合式(22)和式(27),可得末端时刻时间偏差表达式:

更新后的飞行时间为:

更新后的控制指令为:
式(29)(30)分别作为更新后的飞行时间和控制指令,飞行时间和控制量均为闭环形式。通过调节性能泛函中的权值系数、权值矩阵和控制指令系数,实现调节不同时刻控制指令的幅值。
改进后的MPSP 制导方法适用于求解带末端约束的制导问题,本文接下来对MPSP 制导方法进行扩展,解决高超声速飞行器临近空间带多个航路点处动压约束和末端输出量约束条件下的制导律设计问题。
3 带多个航路点约束扩展MPSP 制导方法
3.1 扩展MPSP 制导问题描述
带航路点约束MPSP 制导问题的离散形式可以描述如下:
性能泛函:
3.2 扩展MPSP 控制指令求解
考虑末端时刻时间偏差,各个航路点对应的输出量偏差方程为:

将式(33)代入式(32),得:
其中,

式(34)即为第i个航路点对应的输出量偏差方程。结合式(31)和(34),运用最优控制指令即可得到更新后的飞行时间和控制指令:

其中,
3.3 最低动压约束机动突防策略
运用带多个航路点约束扩展MPSP 制导方法,设计基于最低动压约束的高超声速飞行器非程序自主机动突防策略。根据战场态势规划临近空间航路点,对航路点处的动压进行约束调节飞行轨迹的形状,实现高超声速飞行器临近空间大空域机动飞行。
选择如下形式各航路点处输出量:

4 仿真分析
飞行器运动方程参照文献[12],表1、表2 和表3分别为N1、N2和N3各航路点处的约束条件,DPC1、DPC2 和DPC3 代表三种不同动压条件。
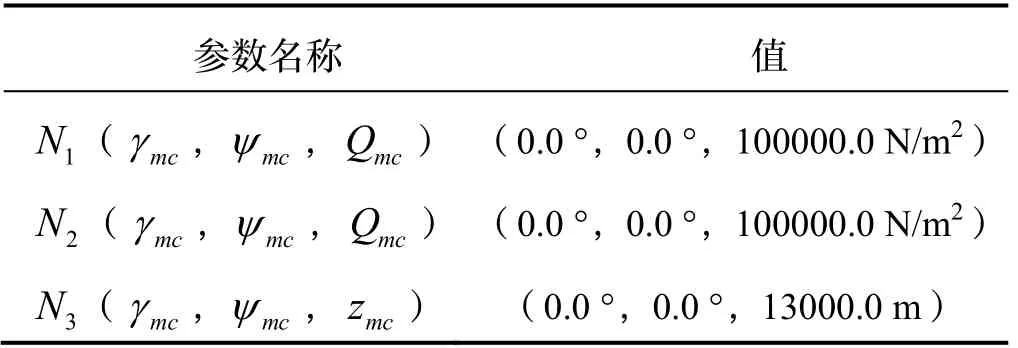
表1 DPC1 约束条件Tab.1 DPC1 constraints
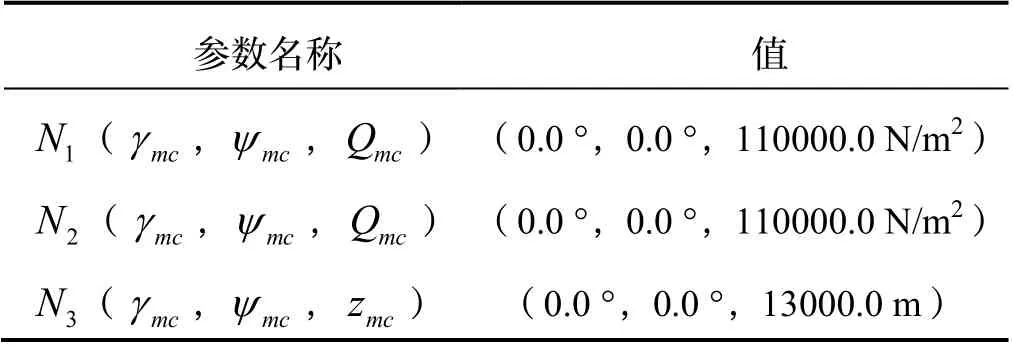
表2 DPC2 约束条件Tab.2 DPC2 constraints
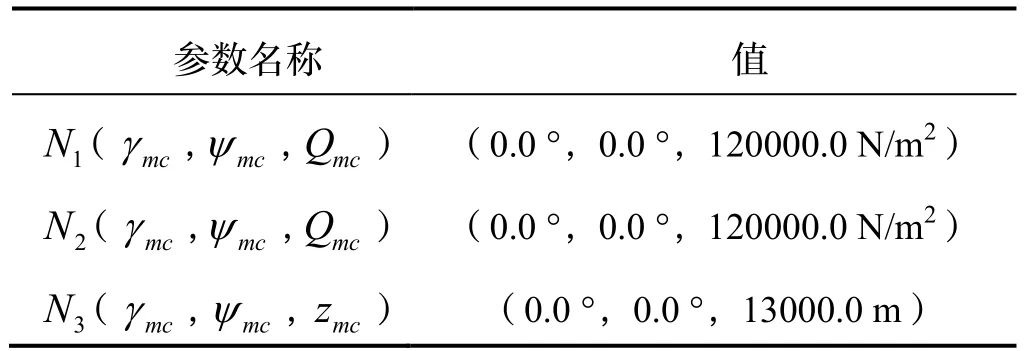
表3 DPC3 约束条件Tab.3 DPC3 constraints
采用比例制导给出控制量初始值,制导方法迭代次数为4。表4、表5 和表6 分别为各航路点处状态值,图1 为动压的变化曲线,仿真结果表明DPC1、DPC2 和DPC3 轨迹约束条件下,高超声速飞行器在航路点和上满足动压约束值,动压偏差在1.0 N/m2范围内。图1表明在1N和2N之间动压变化范围比较小,有利于推进系统稳定工作。法向加速度指令和位移一直保持为零,这里没有给出变化曲线。图2-6 为DPC1、DPC2 和DPC3 轨迹约束条件下,法向加速度指令、速度弹道倾角和位移变化曲线图。仿真表明:各航路点之间法向加速度指令变化平缓,加速度指令的最大值在约束值范围内。表4、表5 和表6 还表明:各航路点处航迹倾角实际值和期望值之间的偏差均在0.1 °范围内,各航路点处高度偏差均在1.0 m 范围内,即本文提出带航路点约束的MPSP 制导方法具有很高的制导精度。对比分析图1 和图6,在航路点和处对动压进行了约束,DPC1 轨迹对应的航路点动压值约束最低,飞行器的飞行高度最高。反之,DPC3 轨迹对应的飞行高度最低。假设DPC1 轨迹对应的动压值为气动操纵的最低动压条件和推进系统稳定工作的动压条件,此时高超声速飞行器在临近空间可以达到最大的飞行高度,飞行器在临近空间纵向平面的机动范围最大,DPC1 轨迹对应的动压值即为高超声速飞行器临近空间大空域机动动压约束条件。
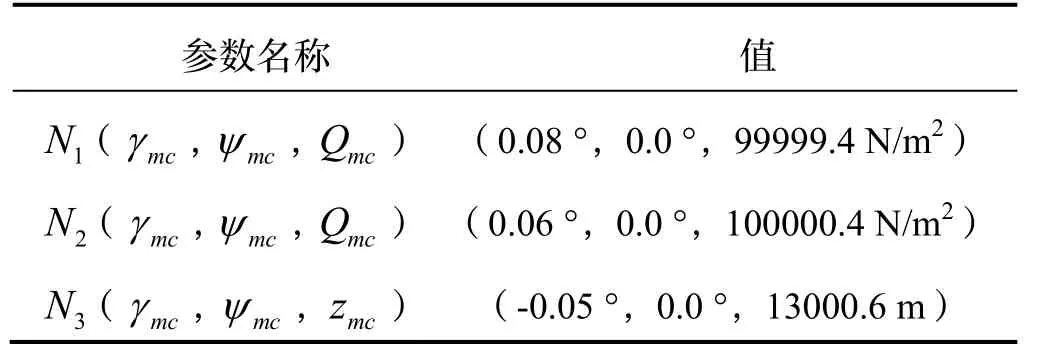
表4 DPC1 航路点状态值Tab.4 DPC1 state value
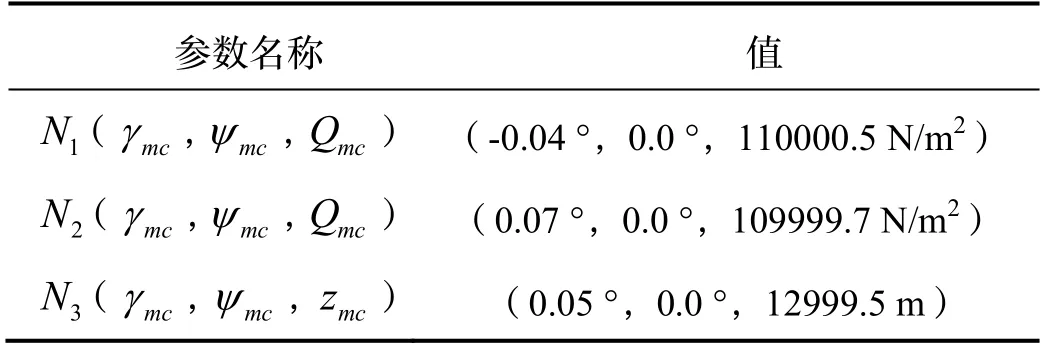
表5 DPC2 航路点状态值Tab.5 DPC2 state value
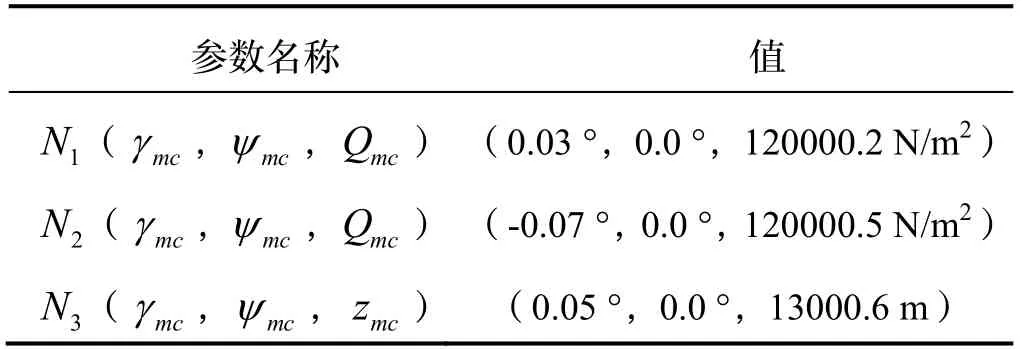
表6 DPC3 航路点状态值Tab.6 DPC3 state value
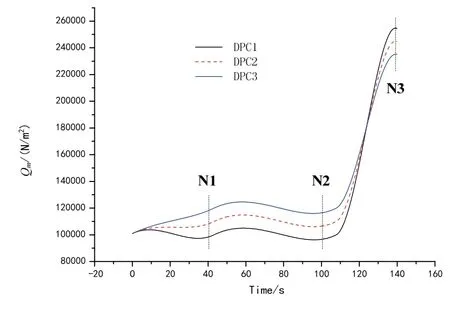
图1 动压变化曲线Fig.1 Dynamic pressurehistories
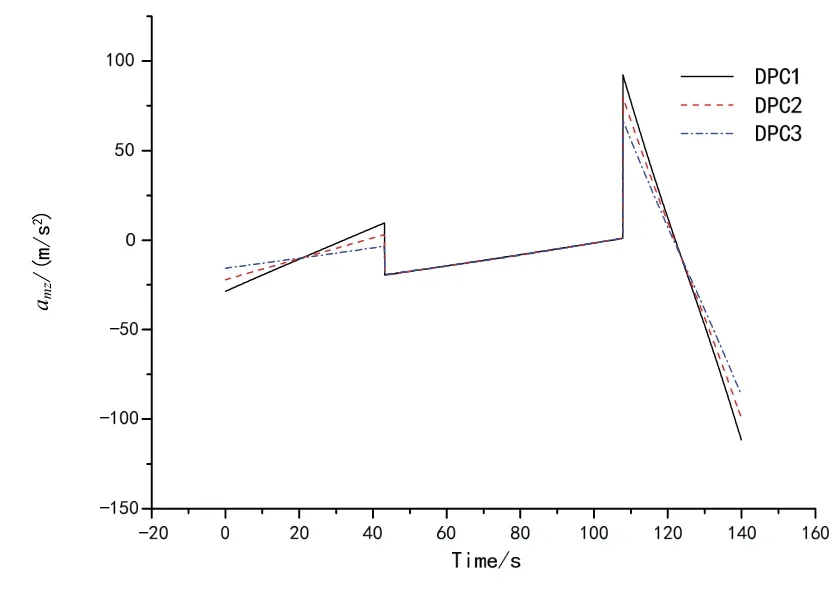
图2 法向加速度指令变化曲线Fig.2 Normal accelerationhistories
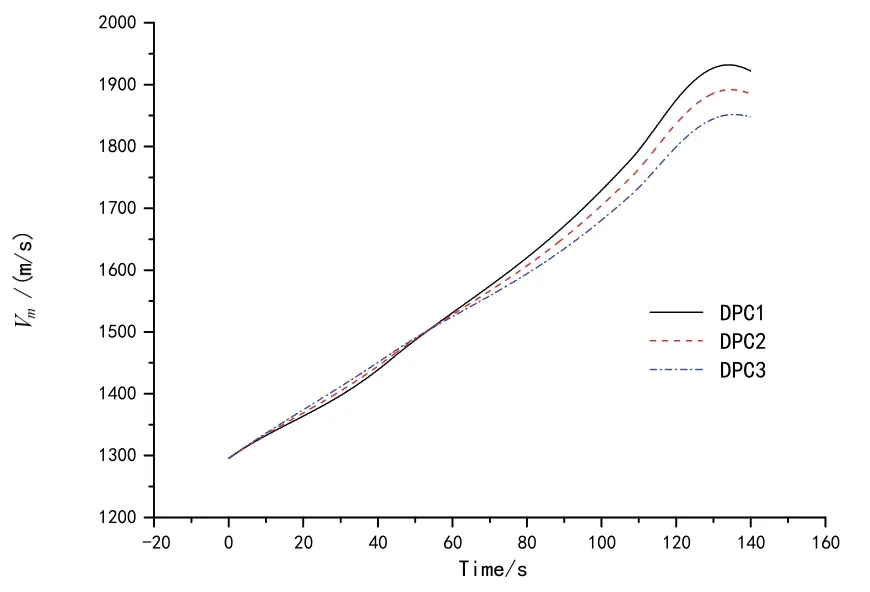
图3 速度变化曲线Fig.3 Velocityhistories

图4 弹道倾角变化曲线Fig.4 Flight path anglehistories

图5 位移变化曲线Fig.5 Positionhistories
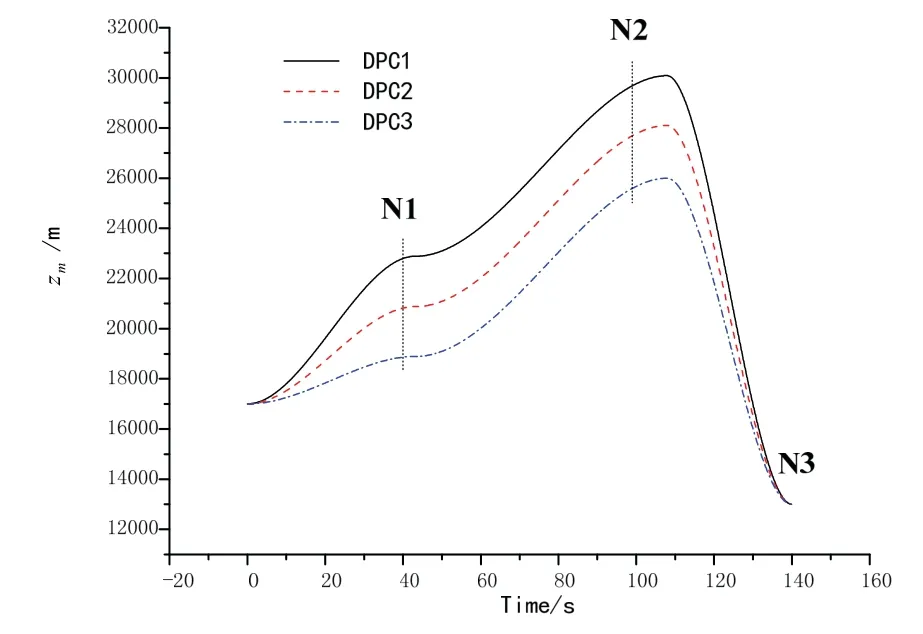
图6 位移变化曲线Fig.6 Positionhistories
5 结论
本文对MPSP 制导方法进行改进,考虑末端时刻时间偏差、控制量输入约束和多个航路点约束,推导得到带多个航路点约束的扩展MPSP 制导方法,解决高超声速飞行器临近空间带多个航路点处动压约束和末端输出量约束条件下的机动突防制导问题。本文提出的基于最低动压约束大空域机动突防策略主要优点有:满足气动操纵所需的最低动压约束条件;推进系统在近似恒定的动压条件下工作性能更加稳定;可通过调节临近空间航路点处动压实现高超声速飞行器临近空间自主机动突防。如何结合战场突防博弈态势动态规划航路点处动压的大小,从而进一步提高高超声速飞行器的自主突防能力是论文下一步研究方向。
