浅谈像素工厂下空三加密文件sigma和group
2021-05-20徐娜
徐娜
(辽宁省基础测绘院,辽宁锦州 121003)
像素工厂对市面所有的传感器数据都能够支持,但不同传感器的数据原理特征完全不一样,而就算是相同传感器不同数据之间也存在差别[1]。sigma和group文件就是像素工厂针对这种差别所设计的,因此被称之为像素工厂空三加密的灵魂文件[2]。
一、sigma和group文件
sigma是像素工厂的空三模型文件,每一个类型的传感器有一个对应格式的sigma文件。sigma是对飞行过程的模拟,分解了外方位元素和内方位元素的误差分布(RPC除外)[3]。sigma是每一次用点文件优化时,与group文件配合使用,sigma给出了每张影像由初始姿态优化到优化后姿态的优化参数权重建议值[4]。因此根据每个数据其参数值也会有所不同(图1)。步调整sigma文件,使自动匹配的初始点点文件进行反复迭代优化直至满足空三加密成果要求[5]。因此像素工厂下的空三加密归纳为几个阶段[6]。
第一阶段:获取分布和维度合适的初始连接点。一个分布均匀,维度合适的初始连接点是非常重要的,它是后面整个空三过程的基础。在做项目时,空三加密的点也不是越多越好,特别是对于遥感卫星影像和推扫式ADS影像,类似这种非常稳定的传感器模型,只要保证点数量够用,分布合理,且维度足够就可以了。点过多的话不但增加了优化时间,也提高了隐藏错点的可能性。
第二阶段:反复迭代滤除错点,并保证点的数量维度分布符合要求。新版本的像素工厂已不再采取手动滤点的方式,可以利用新的pf_at_utility工具能够更科学地根据每次优化残差的正态分布来滤除错点,自动反复迭代直到达到设定的残差阈值。因此在做项目时,只需要根据数据特点,在不同阶段设定合适的sigma值,配合group文件使用直到把错点都滤除,使最终点文件的残差报告和点维度分
二、像素工厂空三加密
像素工厂的空三加密过程可以理解为:首先得到所有影像正确的姿态opt,然后基于符合本数据特征的sigma和group文件对没有错点的点文件进行优化,最终滤除所有错点,逐析都能符合标准要求即可。
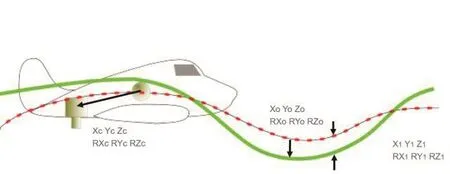
图1 sigma模拟飞行过程图
第三阶段:得到最终的滤除错点的点文件,用合适的符合数据特征的sigma和group文件进行最后一次空三,也就是得到最终一次优化的所有影像姿态的opt文件。
值得注意的是:第二和第三阶段的sigma和group文件是最重要的,只有给定一个合适的sigma和group文件,才能顺利地完成滤点过程,才能通过最终的点文件优化得到正确的opt文件。因此如何调整sigma和group文件是关键,建议如下:
第二滤点阶段的初始阶段:最开始的时候sigma只放开外方位元素,需要针对数据情况分析,选择只放开初始POS精度,或者一起放开航线之间的系统性偏差切比雪夫多项式。
这个阶段是滤除偏差较大的错点的阶段,只放开外方位元素来优化调点比较合适。
第二滤点阶段的后面阶段:在放开外方位元素的基础上,进一步放开内方位元素。这个阶段是在前面过程基础上的精细调点,需要逐步放开能够代表数据误差所在的所有参数。放开sigma的原则是:由小到大,由多到少,先外方位后内方位,一定要根据数据误差特点来给定合适的sigma值。
第三阶段最后一次优化:需要将sigma调整放开能够代表数据误差分布的所有参数,此时需要特别注意的是:整个过程只要sigma放开了需要绑定的参数,就需要配合group文件进行优化。
三、不同传感器影像的sigma和group
像素工厂能支持的常见几种传感器影像数据:无人机影像、ADS推扫式影像、RPC卫星影像和Frame框幅式影像[7]。下面对这几种传感器的sigma和group文件进行分析和研究:
1.无人机影像
无人机sigma是结构最复杂的,共采用共计22个内方位元素和37个外方位元素,能够对相机内部几何进行完全建模,能对导航系统误差,相机相对平台位置方位误差,时间相关的POS数据多项式误差逐条行带等等进行完全纠正。这些参数按照特征可以分为以下三组:
(1) 外方位元素 (GPS/IMU)的初始精度:xn,yn,zn单位为米,rxn,ryn,rzn单位为弧度。
(2)内方位元素:xc,yc,zc &rxc,ryc,rzc为相机与POS平台之间的偏差,xppa,yppa,xpps,ypps为像主点,pd(f)为 焦 距 , k1,k2,k3p1,p2为 畸 变差,x2col ,y2col,x2col,y2col为框标坐标,colc,nrow,rowc,nrow为扫描分辨率。
(3)切比雪夫多项式参数:x0,yo,z0,rx0,ryo,rz0,x1,y1,z1,rx1,ry1,rz1…..用于优化航线之间的系统性偏差。
值得注意的是:a类参数,不需要使用group组文件进行绑定,每张相片上的优化值是不一样的。b类参数,需要使用group组文件进行绑定,每张相片上的优化值必须是一样的。c类参数,需要使用group组文件进行绑定,同航线上的相片优化值必须是一样的。
建议无人机影像调整sigma过程如下:第一步,放开a类和c类参数进行迭代优化调点,按给定的sigma1参数即可;第二步,在sigma1的基础上,继续放b类参数,就是给定的sigma2参数;第三步,当用sigma2调点到没有发现错点而std和max降不下去的时候,就可以在优化的时候生 成 trace_clbc,根 据trace_clbc的优化幅度去调整sigma2的数值。
2.ADS推扫式影像
ADS推扫式相机的sigma文件如图2。系统默认的sigma是直接放开x0,y0, z0, rxc, ryc, rzc这六个参数,但是一般情况下,只放开rxc, ryc, rzc就可以完成整个相对定向的过程。而且为了最大程度地保证POS的原始精度,不建议放开线元素x0,y0,z0,建议ADS推扫式影像调整sigma过程如下:
第一步,在用连接点进行第一次优化之前,一定要关掉sigma文件中所有的参数(都设为0),仅仅放开rxc,ryc,rzc这三个参数,建议值为0.01,0.01,0.01(一般情况下,仅仅用这几个参数就可以完成ADS空三的过程)。
第二步,如果用第一步的参数调整空三,发现错点已经基本没有的情况下,但是残差值降不下去,就可以放开rx0,ry0,rz0或者x0,y0,z0,建议值为0.01,0.01,0.01及1,1,1(这种情况一般不会遇到)。
第三步,前面两步都是在相对定向的阶段,但是如果加入控制点文件进行空三优化,就需要在前面的基础上进一步放开x0,y0,z0,建议值为1,1,1。
3.RPC卫星影像
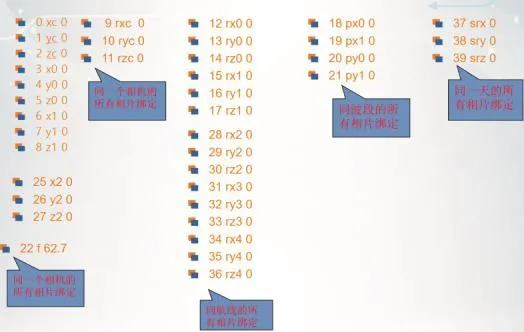
图2 ADS推扫式影像sigma
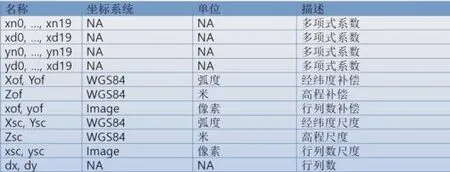
图3 RPC卫星影像sigma
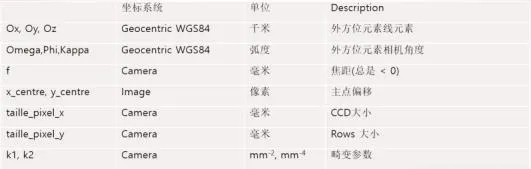
图4 Frame框幅式影像sigma
卫星影像数据的sigma文件如图3,大多数情况只要rpc模型没有问题,调整过程也非常简单,遵循以下几个原则即可:一般默认参数即可,不需要组文件绑定;少数情况需要在默认值基础上继续放开xn1,yn1(0.002);若调整后的sigma仍然不能解决问题,则此数据RPC精度有问题,不符合RPC优化的条件,只能通过多项式的方式依靠大量的控制点来完成纠正。
4.Frame框幅式影像
框幅式影像数据由于飞行稳定,相机质量高,POS精度高[8],影像畸变小,因此sigma构成相对简单,sigma的调整过程也简单(图4)。
建议调整框幅式影像sigma流程如下:
第一步:一般按照默认参数只放开Omega, Phi, Kappa,建议值为0.01,0.01, 0.01。在少数情况下需要进一步放开Ox, Oy, Oz,切记单位是千米,建议值为0.001, 0.001, 0.001。
第二步:少数情况若遇到相机检校不佳,则可能需要进一步放开f, k1,k2, 此时需要用group组文件绑定进行优化。
四、创建group组文件的命令
像素工厂创建组文件的命令:
cli_generate_grp [options] outfile grpfile geom geomdir
其中,grp1,绑定同一天也就是同一次飞行架次的所有影像,适用于xc,yc,zc,rxc,ryc,rzc;grp2, 绑定同一个波段的所有影像,一般不用;grp3,绑定同一条航线的所有影像,一般适用于切比雪夫多项式参数如x0,y0,z0,rx0,ry0,rz0,x1,y1,z1,rx1,ry1,rz1……;grp4,绑定所有影像,一般适用于相机参数如f,k1,k2……;xn,yn,zn,rxn,ryn,rzn不需要进行绑定。
五、结束语
本文分析了sigma和group文件在像素工厂空三加密过程中的重要作用,并介绍几种常见的传感器影像的sigma和group文件,并对如何调整提出解决方案,为后续生产提供有利的技术支撑。