基于转矩观测器的永磁同步电机滑模速度控制
2021-05-20陈晓文程智宾
林 励,陈晓文,程智宾
(1.福建信息职业技术学院物联网与人工智能学院,福建 福州 350003;2.福建信息职业技术学院国际交流中心,福建 福州 350003;3.福建信息职业技术学院教务处,福建 福州 350003)
永磁同步电机因其高效率、紧凑的结构、高转矩电流比等优点被广泛地应用于机器人、电动汽车、数控机床等工业制造领域中[1]。磁场定向控制作为先进的数字控制技术,提高了永磁同步电机驱动器的性能[2]。在磁场定向控制策略中,通常采用包括外部速度环和内部电流环的双闭环控制结构。除了传统的PI控制方法,研究人员还提出了许多先进控制策略,例如滑模控制、二自由度PI控制、模糊控制、预测控制等。其中,滑模控制作为一种特殊的非线性控制策略,可以在控制过程中,依据系统当前状态改变系统结构,使系统根据预定的滑动模态的状态轨迹运动[3]。因此,滑模控制具有动态响应快、参数鲁棒性好等优点。将滑模控制应用于电机控制中,能显著提高电机控制系统的快速响应能力以及对外部扰动的鲁棒性。然而,滑模控制的鲁棒性能提高,通常以增大抖振为代价。转矩观测器能在电机控制系统运行过程中,实时估计外部负载转矩。近年来,扰动观测器的研究获得了巨大的进展。研究人员陆续提出龙伯格扰动观测器、高增益扰动观测器、滑模扰动观测器等先进的扰动估计策略,并取得了良好的效果[4]。其中,高增益观测器依据系统输入变量,输出放大较大倍数的状态变量估计值。
本文结合滑模速度控制和高增益转矩观测器(high-gain load torque observer,HTO),设计了基于高增益转矩观测器的的滑模速度控制(high-gain load torque observer based sliding mode speed control, HTO-SMPSC)方法,并建立MATLAB/Simulink仿真模型,验证了所提出控制方法的鲁棒性及快速性。
1 控制系统建模
1.1 永磁同步电机数学模型
在两相正交旋转坐标系下,表贴式永磁同步电机模型可以表示为[5]

(1)
式中,ud、uq为d、q轴定子电压,L表示定子电感,R表示定子电阻,id、iq为d、q轴定子电流,ωm为转子机械角速度,λ表示永磁磁链,p表示极对数,B是粘滞摩擦系数,J是转子惯量,TL为负载转矩。
1.2 高增益转矩观测器设计
假设速度环控制周期足够小,则负载转矩可以视为常量。于是考虑如下的运动方程
(2)
高增益状态观测器可以设计为
(3)

式(2)减式(3)可得
(4)

(5)
(6)

(7)

根据前向欧拉公式,式(3)可以离散化为:

(8)
1.3 HTO-SMPSC设计
定义滑模面函数为:

(9)

(10)
式中,ρ1>0,ρ2>0。根据式(2),式(9),式(10)可得滑模速度控制律:

(11)
将高增益转矩观测器估计的负载转矩代入式(11),可得HTO-SMPSC:

(12)
1.4 永磁同步电机级联控制
永磁同步电机级联控制算法包含电流及速度控制。算法的输出是下一个采样周期输入的d,q轴定子电压。算法的控制目标可以表述为:
把定子电流约束在永磁同步电机系统允许的最大值和最小值内。
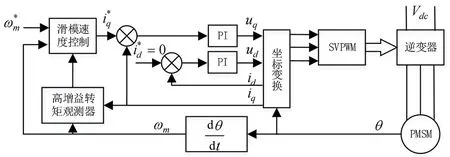
图1 永磁同步电机级联控制算法总体框图Fig.1 The block diagram of cascading control arithmetic for permanent-magnet synchronous motor
2 MATLAB/Simulink仿真模型设计及结果分析
为了验证所设计算法的有效性,本文在MATLAB/Simulink中,分别搭建了HTO-SMPSC及PI速度控制器仿真模型。其中永磁同步电机模型采用Power Systems工具箱的Permanent Magnet Synchronous Machine,电机参数见表1,逆变桥采用Universal Bridge,并配置为三桥臂模式,HTO-SMPSC、PI速度环、PI电流环、Park变换、Clark变换、反Park变换、SVPWM等模块均采用m语言编写。控制系统采用前向欧拉法离散化,采样周期为0.000 001 s。控制系统控制周期配置为12 kHz。
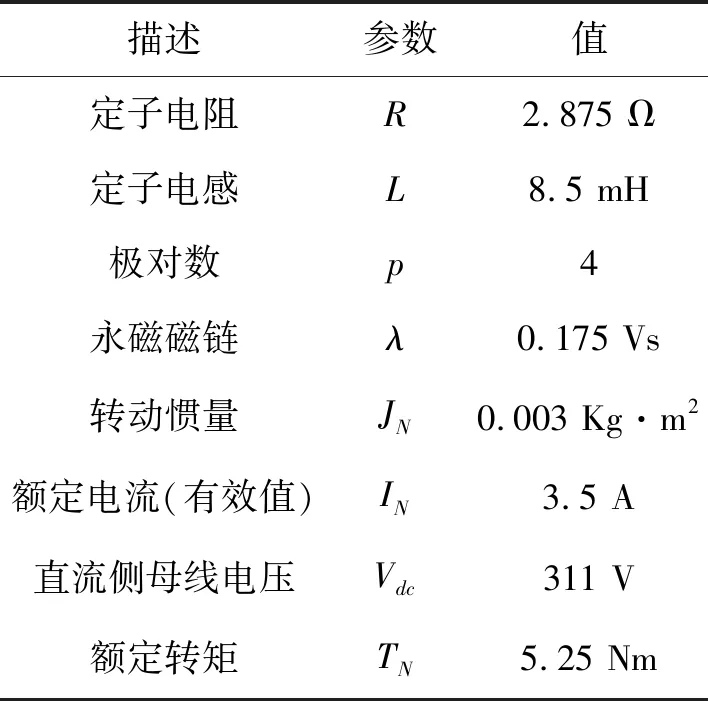
表1 SPMSM的参数
图2评估了HTO的性能。电机系统首先工作于无负载状态下,并且指令速度配置为1 500 r·min-1,此时估计速度为1 500 r·min-1,估计转矩为0 N·m;接着施加负载转矩5 N·m,电机速度由1 500 r·min-1拉低到1 360 r·min-1,经过6 ms后恢复到1 500 r·min-1,在这个过程中估计速度能快速准确跟踪实际速度,同时估计转矩在6 ms内收敛到负载转矩。可见,HTO具有良好的速度及转矩估计性能,符合设计目标。
图3评估了HTO-SMPSC和PI的阶跃响应性能和负载扰动性能。电机系统首先工作于无负载状态下,并且指令速度为0 r·min-1,接着指令速度由0 r·min-1跳变到1 500 r·min-1,HTO-SMPSC的机械角速度在10 ms内收敛到指令速度,并且没有超调;相对的,PI控制器的机械角速度具有100 r·min-1的超调,并降低了收敛速度。在0.05 s,对电机施加5 N·m负载转矩,HTO-SMPSC的机械角速度降低到1 360 r·min-1,并经过6 ms恢复到指令值;同时PI控制器的机械角速度跌落到920 r·min-1,并经过20 ms后恢复到指令速度。可见,在阶跃响应测试和负载转矩测试中,HTO-SMPSC的动态性能都超越PI控制器。
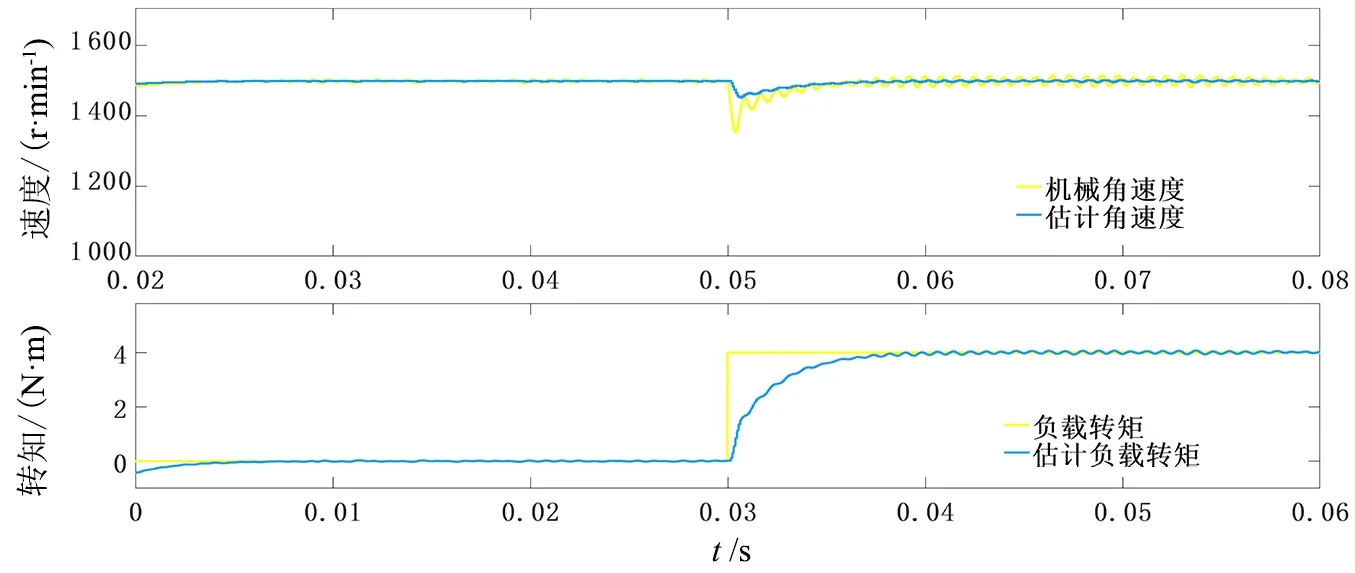
图2 HTO转矩及角速度估计性能Fig.2 Estimated performance of HTO torque and angular velocity
图3 HTO-SMPSC及PI控制器速度控制性能Fig.3 Speed control performance of HTO-SMPSC and PI controller
3 讨论
本文在永磁同步电机机械运动模型基础上,设计高增益转矩观测器,并通过Hurwitz稳定条件给出参数整定策略;进而根据指数趋近律,设计滑模控制器;最后将估计的负载转矩前馈补偿滑模控制器,得到HTO-SMPSC。本文提出的算法在MATLAB/Simulink中进行了仿真研究,研究结果表明,HTO具有良好的速度及转矩估计性能,HTO-SMPSC在阶跃响应测试及负载扰动性能测试中,具有比PI控制器更好的动态性能。
虽然HTO-SMPSC在仿真中表现出了优异的动态性能和抗干扰能力,并且通过引入HTO,一定程度上减小了滑模抖振,但是滑模切换振颤仍然较为严重。为了解决这个问题,接下来的工作拟从以下几个方面寻求突破:
1)本文采用的指数趋近律,在滑模切换面附近,将等效于等速趋近律,导致滑模抖振幅度与开关增益直接相关。因此,研究新型滑模趋近律,在保证动态性的前提下,进一步降低滑模抖振将是未来的重要课题之一。
2)引入饱和函数、sigmoid函数等新型切换函数,替换符号函数,从而降低滑模抖振问题。
3)研究模糊滑模方法,依据专家经验,以降低抖振为目标设计模糊规则,从而有效降低滑模控制系统的抖振现象。
