椭圆导角混合柔性铰链的设计计算与性能分析
2021-05-19王传礼陈国瑜
王传礼 李 成 何 涛 陈国瑜
1.安徽理工大学机械工程学院,淮南,2320012.中国矿业大学江苏省矿山机电装备重点实验室,徐州,2211163.安徽理工大学矿山智能装备与技术安徽省重点实验室,淮南,232001
0 引言
柔性铰链已被广泛应用于微机电系统、精密工程、光学仪器中,以获得高位移分辨率、高传动精度和结构紧凑的无摩擦运动关节[1-2]。SIMITH等[3]推导出椭圆型柔性铰链的闭环柔度方程。吴鹰飞等[4]以圆心角为积分变量,推导了圆弧柔性铰链的柔度计算公式,且表达式较为简洁、全面和准确。LOBONTIU等[5]提出了导角直梁型柔性铰链平面内柔度方程,相比直圆柔性铰链,导角直梁型柔性铰链具有更大的转动柔度,但回转精度较低。张志杰等[6]以卡氏第二定理为基础,分析了双曲线型柔性铰链的柔度和回转精度的理论模型。CHEN等[7]建立了椭圆弧形柔性铰链柔度矩阵的广义模型,使得导角型、椭圆型、圆弧形等多种柔性铰链的柔度方程合并在一组方程下。LI等[8]设计了一种幂函数型柔性铰链,基于单位载荷法推导了柔性铰链的闭环柔度方程,且分析结果表明,其回转精度高于圆弧柔性铰链。TIAN等[9]提出了V形柔性铰链的闭环柔度方程以及运动精度模型,讨论了几何参数对柔性铰链机械特性的影响,分析结果表明,V形柔性铰链可以提供比圆弧柔性铰链更高或更低的刚度,使得V形柔性铰链可以通过参数的合理设计,实现不同领域的性能要求。XU等[10]考虑柔度和精度两项指标,综合比较了椭圆型、圆弧型、抛物线型和双曲型四种柔性铰链的性能,并指出椭圆柔性铰链具有最佳综合性能。LIANG等[11]提出一种U形柔性铰链,分析结果表明它比圆弧柔性铰链具有更高的疲劳寿命。
随着微纳米和精密驱动技术的快速发展,对柔性铰链的回转精度和转动范围的要求也越来越高,为了得到高性能的柔性铰链,通过将柔性铰链的对称结构分解重组,出现了一系列复合形式的混合柔性铰链。LIN等[12]设计并分析了双曲线导角混合柔性铰链,并对其柔度、精度和最大应力的计算方法进行了研究。WANG等[13]设计了一种指数正弦型混合柔性铰链,获得了较高的回转精度。张伟等[14]提出一种直圆抛物线混合柔性铰链,分析结果表明它融合了直圆铰链和抛物线铰链的优点,性能更加优越。
基于混合柔性铰链的设计思路,结合低应力水平的椭圆型铰链和大柔度的导角型铰链,本文提出一种椭圆导角单轴混合柔性铰链,以卡氏第二定理为基础,推导了柔性铰链的闭环柔度方程以及回转精度的计算公式,讨论了参数对各项性能的影响趋势,并通过定义柔度精度比,综合分析了椭圆导角混合柔性铰链的工作性能。最后考虑回转能力和应力水平,分析了椭圆导角和直圆柔性铰链在实际应用中的工作性能。
1 椭圆导角混合柔性铰链的柔度计算
图1为椭圆导角混合柔性铰链的结构简图,其参数如下:铰链宽度b,最小厚度t,导角半径r,椭圆长半轴长度m,短半轴长度n,铰链长度L=2m,直梁段长度l=m-r,设任意截面的厚度为h(x)。

图1 椭圆导角混合柔性铰链的结构简图Fig.1 Structural sketch of elliptical corner-filletedhybrid flexure hinge
推导时作以下假设:铰链的变形主要集中在铰链部分,忽略其他部分的变形;因为铰链的变形十分微小,故各变形微元体之间的干涉予以忽略;基于小变形悬臂梁假设,剪切和扭转带来的偏转可以忽略不计。设右端为固定端,左端为自由端,自由端受力矩Mz、力Fx和Fy作用。柔性铰链的受力示意图见图2,其中:点1表示自由端; 点2表示直梁段的中点位置,并以点2处柔度的大小表征回转精度的高低,柔度越大,说明回转精度越低;点3表示固定端。

图2 椭圆导角混合柔性铰链的受力分析图Fig.2 Force analysis diagram of elliptical corner-filletedhybrid flexure hinge
由图2可以看出,Mz1和Fy1使柔性铰链产生绕z轴的微小角变形,并在转动时,使铰链产生沿x、y轴的线位移变形。力Fx1使铰链产生拉压变形,产生微小的沿x轴的轴向位移。根据卡氏第二定理,仅考虑面内变形,悬臂梁在一端固定、一端受力的状态下,其自由端形变与载荷的关系为
(1)
式中,Ci,j为柔度,j表示载荷,i表示在j载荷作用下产生的位移量;θz为自由端绕z轴产生的角位移;y1为自由端沿y轴的线位移;x1为自由端沿x轴的线位移。
对式(1)等号左边的位移量应用卡氏第二定理,得
(2)
式中,U为变形能。
由材料力学理论可知,变形能为
(3)
A(x)=bh(x)I(x)=bh3(x)/12
式中,E为弹性模量;A为铰链的横截面面积;I为转动惯量。
将式(3)代入式(2)中求解相应位移量,可以得到自由端各位移变形量的计算公式:
(4)
将式(4)结果代入式(1),代入转动惯量和横截面面积计算公式,得到柔度矩阵中的各柔度项计算公式:
(5)
在同一坐标系内,柔性铰链任意截面厚度h(x)的连续函数形式可以表示为
(6)
将式(6)代入式(5)直接进行积分求解,因过程太复杂,为简化计算量,导角段和椭圆段引入圆心角[15]φ1和离心角[16]φ2为积分变量,从而简化积分函数和积分区间,其中x可以表示为
(7)
相应的微分为
(8)
将式(7)代入式(6),则柔性铰链任意截面的厚度方程也可以表示为
(9)
设s1=r/t,s2=n/t,令g(φ1)=h(φ1)/r=2+1/s1-2cosφ1,g(φ2)=h(φ2)/n=2+1/s2-2cosφ2。将式(7)~式(9)代入式(5),对各积分函数离散求解再叠加处理,整理后各柔度项可以表示为
(10)
不考虑s1、s2的区别,各积分函数N的积分结果分别为
2 椭圆导角混合柔性铰链的回转精度
柔性铰链受外力矩变形时,必然导致铰链的回转中心点产生漂移,这就影响了铰链的回转精度。椭圆导角混合柔性铰链绕轴转动时,直梁段中心点2处的柔度大小可以表征其回转精度的高低。由图2所示柔性铰链的受力分析图可以看出,自由端受力作用下,柔性铰链的中心点2处会产生沿x轴和y轴的线位移变形x2和y2,为求得点2处的柔度,假想在点2处施加一组零值力Fx2、Fy2,其中Fx2沿x轴正方向,Fy2沿y轴正方向,如图2所示。根据卡氏第二定理,点2处柔度与自由端载荷的矩阵关系为
(11)
对式(11)等号左边的位移量应用卡氏第二定理:应变能对作用在结构上的某个载荷的偏导数就等于该载荷作用点沿该载荷作用方向的位移,可知
(12)
根据材料力学相关理论,变形能为
(13)
式(13)代入式(12)并求偏导,可知点2处的位移表达式为
(14)
结合式(11)中柔度与自由端载荷的矩阵关系,可以得到点2处各柔度项计算公式为
(15)
同理,积分得到回转精度的计算公式为
(16)
从柔度和回转精度的求解过程可以看出,不管柔度还是回转精度,都是其结构和材料决定的固有属性,而与受力的大小无关。需要说明的是,当几何参数发生变化时,椭圆导角混合柔性铰链具有以下演化形式:①当m=n>r时,演化为直圆导角混合柔性铰链;②当m=r>n时,演化为椭圆直圆混合柔性铰链;③当m=n=r时,演化为直圆柔性铰链。文中柔度和回转精度的计算公式对以上几种演化结构下的柔性铰链同样适用,此点也在后续具体算例中给予了验证。
3 柔度与回转精度的算例验证
为了验证椭圆导角混合柔性铰链柔度和回转精度计算公式的正确性,对其进行算例计算。算例中的材料均采用45钢,材料的弹性模量E=205 GPa,泊松比μ=0.29。在ANSYS中进行静力学分析,其中Fx1=Fy1=1 N,Mz1=1 N·m。选择9组不同的结构参数(表1),图3所示为第一组参数下柔性铰链的有限元模型,柔度与回转精度有限元解与计算公式的解析解比较见表2。
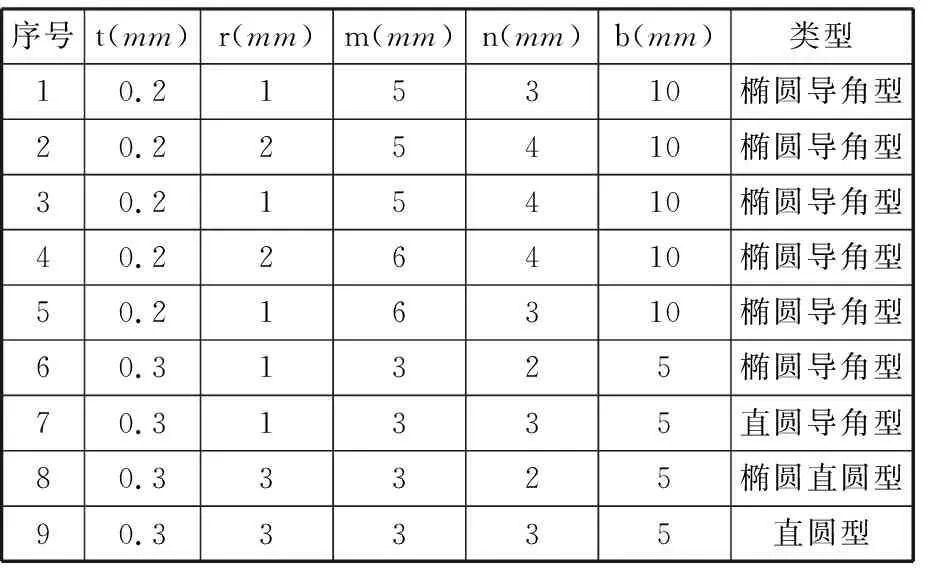
表1 柔性铰链的仿真结构参数
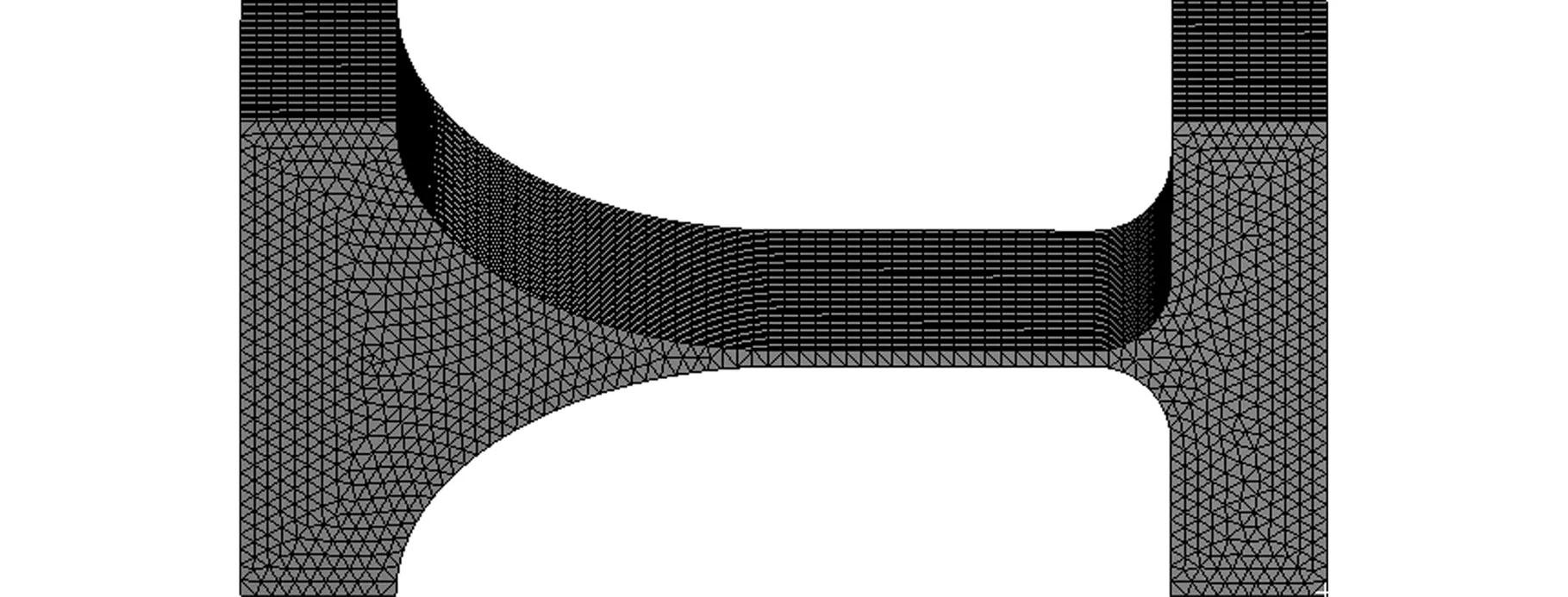
图3 椭圆导角混合柔性铰链的有限元模型Fig.3 Finite element model of elliptical corner-filletedhybrid flexure hinge
在公式推导中进行了一系列假设,如忽略铰链以外的变形、微元之间的耦合形变、剪切和扭转变形的影响等,由表2可以看出,椭圆导角型混合柔性铰链的柔度解析解与有限元解的最大误差在8%以内,回转精度解析解与有限元解的最大误差在9%以内,两者的结果吻合较好,验证了本文提出的柔度和回转精度计算公式的正确性。
4 讨论
4.1 结构参数对柔度的影响
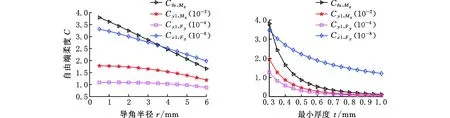
在柔性铰链的设计过程中,为了更加高效地设计出符合性能要求的柔性铰链,有必要清晰地掌握柔性铰链结构参数与其机械特性之间的关系。从柔度的计算公式(10)可以看出,柔度的大小主要与铰链宽度、最小厚度、椭圆长半轴、椭圆短半轴以及导角半径有关,取任意一项参数在合理的范围内变动且固定其他参数不变,利用式(10)求出不同参数下各柔度项的大小,就可以得到任一参数对柔度性能的影响。结构参数对柔度的影响如图4所示。
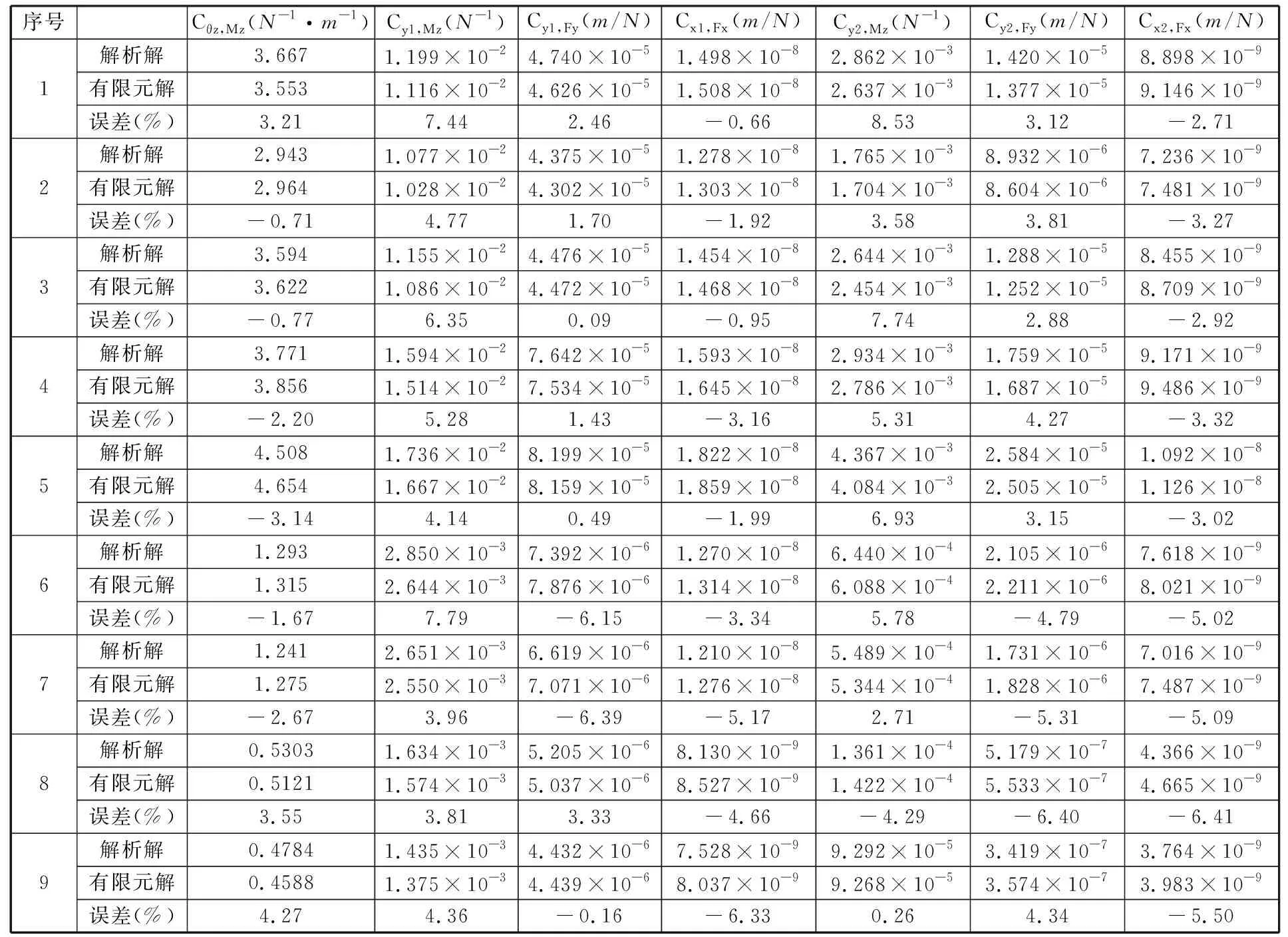
表2 柔度和回转精度的解析解与有限元解的比较

(a)椭圆长半轴对柔度的影响 (b)椭圆短半轴对柔度的影响 (c)铰链宽度对柔度的影响
(d)导角半径对柔度的影响 (e)最小厚度对柔度的影响图4 结构参数对柔度的影响Fig.4 Influence of structural parameters on compliance
由图4可以看出,不同柔度项随任意参数变化的趋势具有相似性,但其变化的速率是不相同的。各项柔度都随椭圆长半轴的增大而增大,随椭圆短半轴、铰链宽度、导角半径和最小厚度的增大而减小。不同柔度项对任意参数变化的敏感程度也具有相似性,其中各项柔度对最小厚度的变化最为敏感,对椭圆短半轴变化的敏感性最弱。
由图4a可以看出:Cθz,Mz和Cx1,Fx随椭圆长半轴的增大呈线性增长趋势,Cy1,Mz和Cy1,Fy随椭圆长半轴的增大呈非线性增长趋势。由图4b、图4c和图4e可以看出:Cθz,Mz、Cy1,Mz、Cy1,Fy和Cx1,Fx随椭圆短半轴、铰链宽度或最小厚度的增大呈非线性减小趋势。由图4d可以看出:Cθz,Mz和Cx1,Fx随导角半径的增大近似呈线性减小趋势,Cy1,Mz和Cy1,Fy随导角半径的增大呈非线性减小趋势。
4.2 结构参数对回转精度的影响
回转精度表征了柔性铰链工作的准确性和可靠性,也是评价柔性铰链性能的重要指标。从回转精度的计算公式(16)可以看出,回转精度的高低同样与椭圆长半轴、椭圆短半轴、铰链宽度、导角半径及最小厚度有关。同理,利用式(16)求出不同参数取值下回转中心处柔度的大小,结构参数对回转精度的影响如图5所示。
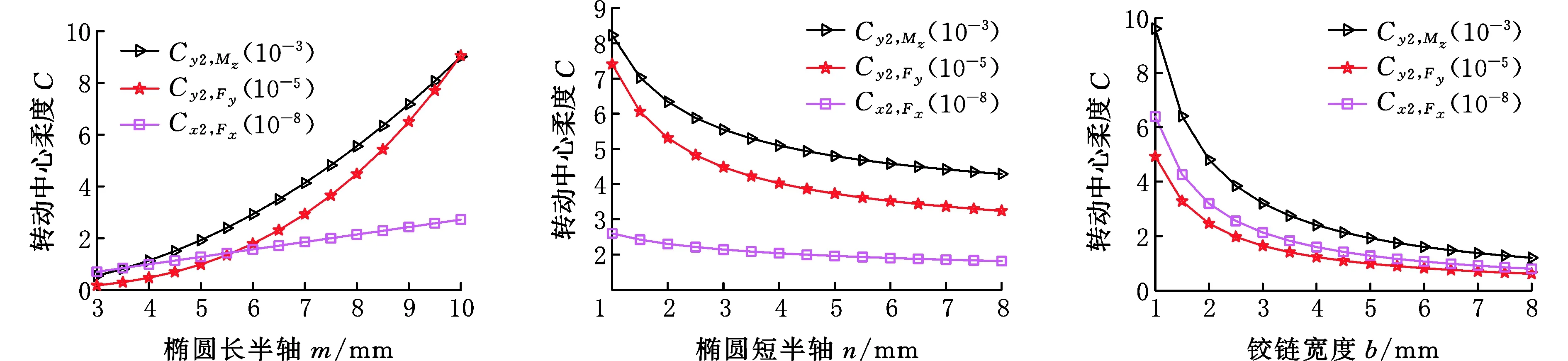
(a)椭圆长半轴对回转精度的影响 (b)椭圆短半轴对回转精度的影响 (c)铰链宽度对回转精度的影响
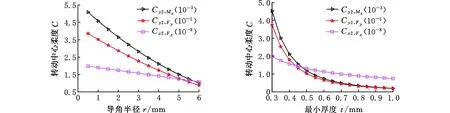
(d)导角半径对回转精度的影响 (e)最小厚度对回转精度的影响图5 结构参数对回转精度的影响Fig.5 Influence of structural parameters on rotation accuracy
由图5可以看出:回转精度随椭圆长半轴的增大而降低,随椭圆短半轴、铰链宽度、导角半径和最小厚度的增大而增大。同理,各项回转精度对最小厚度的变化最为敏感,对椭圆短半轴变化的敏感性最弱。可以发现,柔度与回转精度随参数的变化趋势具有相反性。
由图5a可以看出:Cx2,Fx随椭圆长半轴的增大呈线性增长趋势,Cy2,Mz和Cy2,Fy随椭圆长半轴的增大呈非线性增长趋势。由图5b、图5c和图5e可以看出:Cy2,Mz、Cy2,Fy和Cx2,Fx随椭圆短半轴、铰链宽度或最小厚度的增大都呈非线性减小趋势。由图5d可以看出:Cy2,Mz、Cy2,Fy和Cx2,Fx随导角半径的增大近似呈线性减小趋势。
4.3 结构参数对柔度精度比的影响
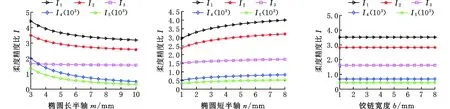
从上文的分析可以看出,柔度与回转精度随参数的变化趋势具有相反性,这意味着通过单一参数改变来增大柔度的同时,必然导致回转精度的降低。为了综合考虑柔度与回转精度,对两者进行比值处理,以柔度精度比来评估自由端位移相同时柔性铰链保持转动中心能力的高低,柔度精度比越大,柔性铰链的综合机械性能越好。利用式(10)与式(16)进行比值处理,结构参数对柔度精度比的影响如图6所示。不同柔度精度比的定义如下:
由图6可以看出:各项柔度精度比随椭圆长半轴和最小厚度的增大而下降,随椭圆短半轴和导角半径和最小厚度的增大而增大,随铰链宽度的变化呈不变的趋势,这一点也可以直观地从计算公式中看出。
由图6a可以看出:I1、I2、I4和I5随椭圆长半轴的增大呈非线性下降趋势,I3随椭圆长半轴的增大近似呈线性下降趋势,且变化趋势较为平缓。从图6b可以看出:I1~I5随椭圆短半轴的增大呈非线性增大趋势,且变化趋势越来越平缓。由图6d可以看出:I1和I2随导角半径的增大呈非线性增大趋势,I3、I4和I5随导角半径的增大近似呈线性增长,且I1和I2的变化趋势较快,I3、I4和I5的变化趋势较为平缓。由图6e可以看出:I1和I2随最小厚度的增大呈非线性降低趋势,I3、I4和I5近似呈线性降低趋势,I1和I2的变化趋势较快,I3、I4和I5的变化趋势较为平缓。
(a)椭圆长半轴对柔度精度比的影响 (b)椭圆短半轴对柔度精度比的影响(c)铰链宽度对柔度精度比的影响

(d)导角半径对柔度精度比的影响 (e)最小厚度对柔度精度比的影响图6 结构参数对柔度精度比的影响Fig.6 Influence of structural parameters oncompliance precision ratio
综合以上对柔度、回转精度和柔度精度比的分析,为了提高柔度,应该以减小最小厚度为首要技术手段,虽然会引入回转误差,但其综合性能是在逐渐提升的,但应注意,减小最小厚度的同时,其应力集中也更明显。其次,可以通过减小铰链宽度来提高柔度的大小,此时其综合性能是保持不变的。随着其他结构参数(椭圆长、短半轴以及导角半径)的改变,柔度增大的同时,精度损失却更为严重,导致了综合性能的降低。
4.4 性能分析
对于文中椭圆导角型柔性铰链结构,在参数的极限条件下,演化出直圆导角、椭圆直圆和直圆三种柔性铰链。由于随着椭圆短半轴或导角半径的增大,柔度是降低的,回转精度是提高的,因此椭圆导角混合柔性铰链具有最大的柔度和最低的回转精度,直圆柔性铰链具有最小的柔度和最高的回转精度。
为了进一步定量的分析柔性铰链的性能,以表1中第6~9组数据为例,以解析解建立4种柔性铰链偏转角度与载荷大小之间的关系,如图7所示,可以看出,柔性铰链的输入和输出之间具有良好的线性关系。其中,椭圆导角型柔性铰链和直圆导角型柔性铰链的性能较为接近,而椭圆直圆型柔性铰链与直圆型柔性铰链的性能较为接近,这主要是由于柔度对导角半径变化的敏感性远高于椭圆短半轴。当载荷大小相同时,椭圆导角型柔性铰链或直圆导角型柔性铰链的偏转角度约为椭圆直圆型柔性铰链或直圆型柔性铰链的2~3倍。
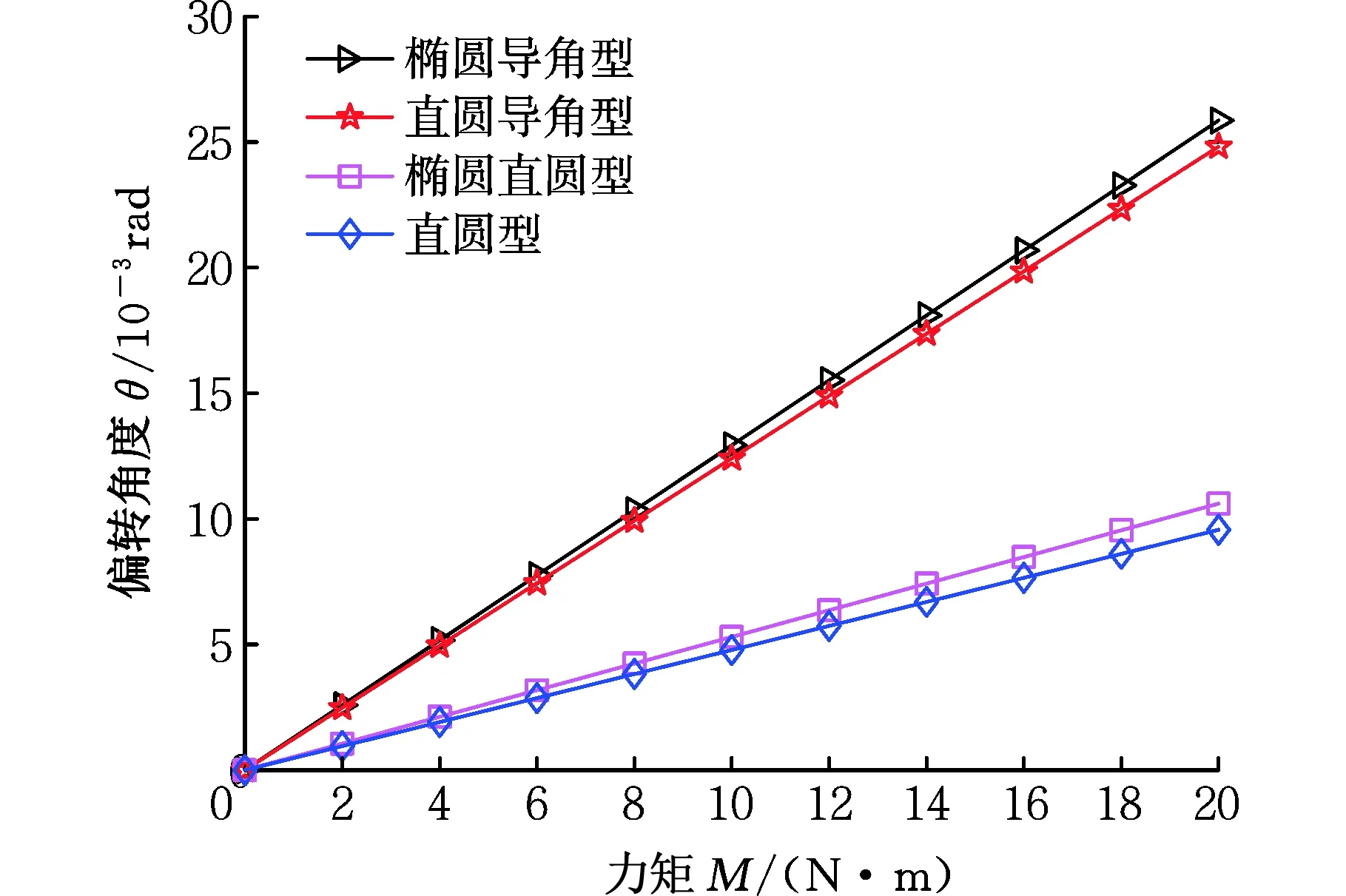
图7 柔性铰链偏转角度与载荷大小之间的关系Fig.7 Relationship between deflection angle and loadof flexure hinge
5 应用研究
设计了一种基于柔性铰链的往复式摩擦磨损试验机,用来探究不同载荷、不同速度下的磨损规律或分析表面技术、织构技术等对试件减磨或润滑性能的影响。试验机主要由驱动机构、上试件、下试件、柔性铰链、标定装置、加载砝码、测控系统等组成,其结构示意图见图8。其原理为:曲柄连杆机构驱动下试件做往复运动,上试件通过双头螺柱与柔性铰链连接,上下试件以半圆柱副接触,并在砝码加载力的作用下产生滑动摩擦力,同时将摩擦力传递给柔性铰链,通过传感器检测柔性铰链的输出位移,在标定输入力与输出位移的关系后,即可反推出摩擦副间摩擦力的大小。主要仪器设备型号:NI数据采集卡(USB-6003)、力传感器(HZC-B01)、基恩士接触式位移传感器(GT2-P12K,分辨力为0.1 μm)。
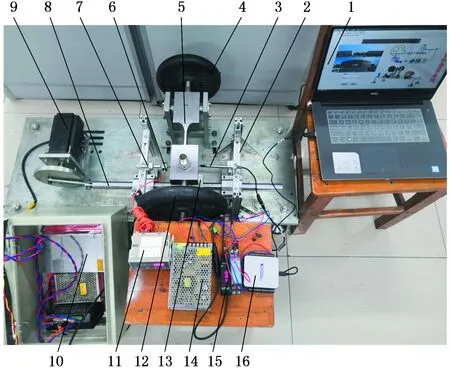
1.PC端 2.支架 3.位移传感器 4.配重砝码 5.柔性铰链6.力传感器 7.标定力加载装置 8.下试件 9.电机10.电机控制箱 11.力传感器显示屏 12.加载砝码13.上试件 14.位移传感器驱动电源15.位移传感器输出放大器 16.数据采集卡图8 摩擦磨损试验机实物Fig.8 Friction and wear testing machine
采用线切割方法加工了椭圆导角和直圆柔性铰链实物结构,材料与上文算例相同(45钢),实物结构如图9所示,主要结构参数见表3。
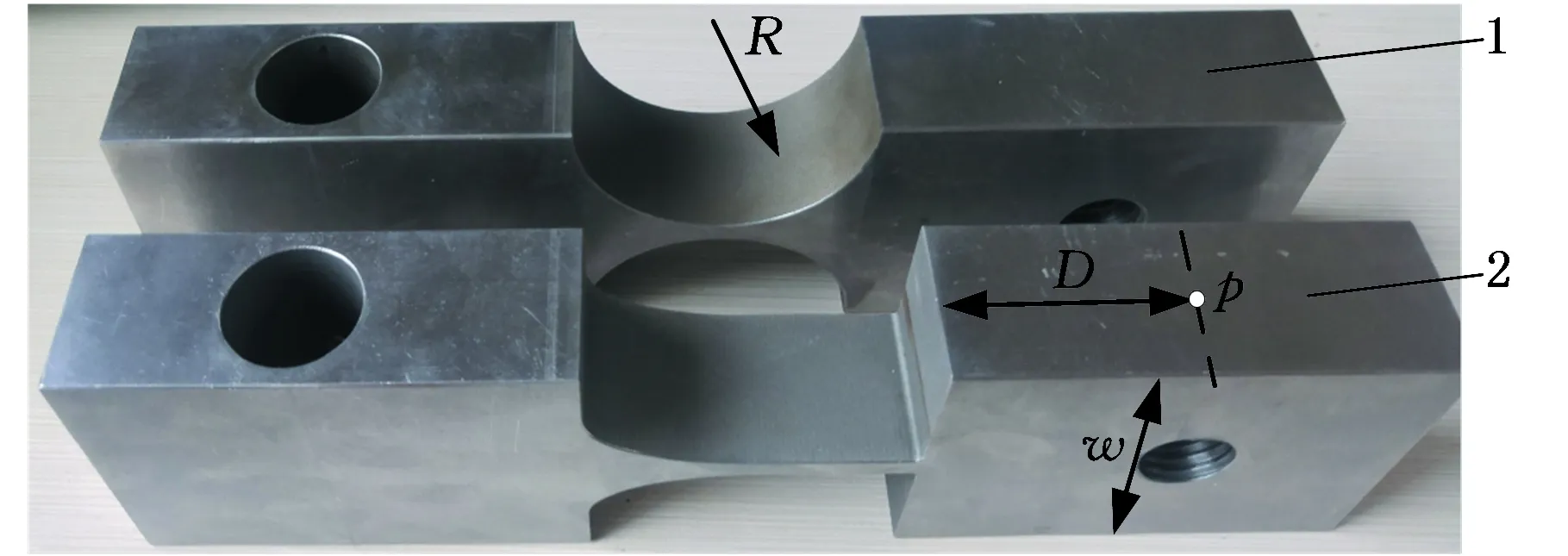
1.直圆柔性铰链 2.椭圆导角混合柔性铰链图9 柔性铰链加工实物Fig.9 Specimens of flexure hinge

表3 柔性铰链的主要结构参数
在柔性铰链受摩擦力Ff作用下会产生微小转角,计算柔性铰链测量点p(图9)的输出位移时,可以将摩擦力Ff转化为等效力矩,因椭圆导角型柔性铰链非对称的结构特点,其回转中心偏移到直梁段中点位置,而直圆型柔性铰链就在几何中心。柔性铰链测量点的输出位移采用弧长公式近似计算,因此,椭圆导角和直圆柔性铰链的输出位移ΔY1和ΔY2可以分别表示为
ΔY1=
(17)
(18)
式中,Ff为摩擦力;D为铰链自由端与传感器测量点位置的距离;w为最大厚度;R为直圆柔性铰链半径。
采用标定力加载装置、力传感器和位移传感器对柔性铰链的输入-输出特性关系进行实验标定,输入力分别设置为10 N、20 N、30 N、40 N、50 N、60 N,两种柔性铰链的理论计算结果、有限元仿真结果和实验标定结果如图10所示。
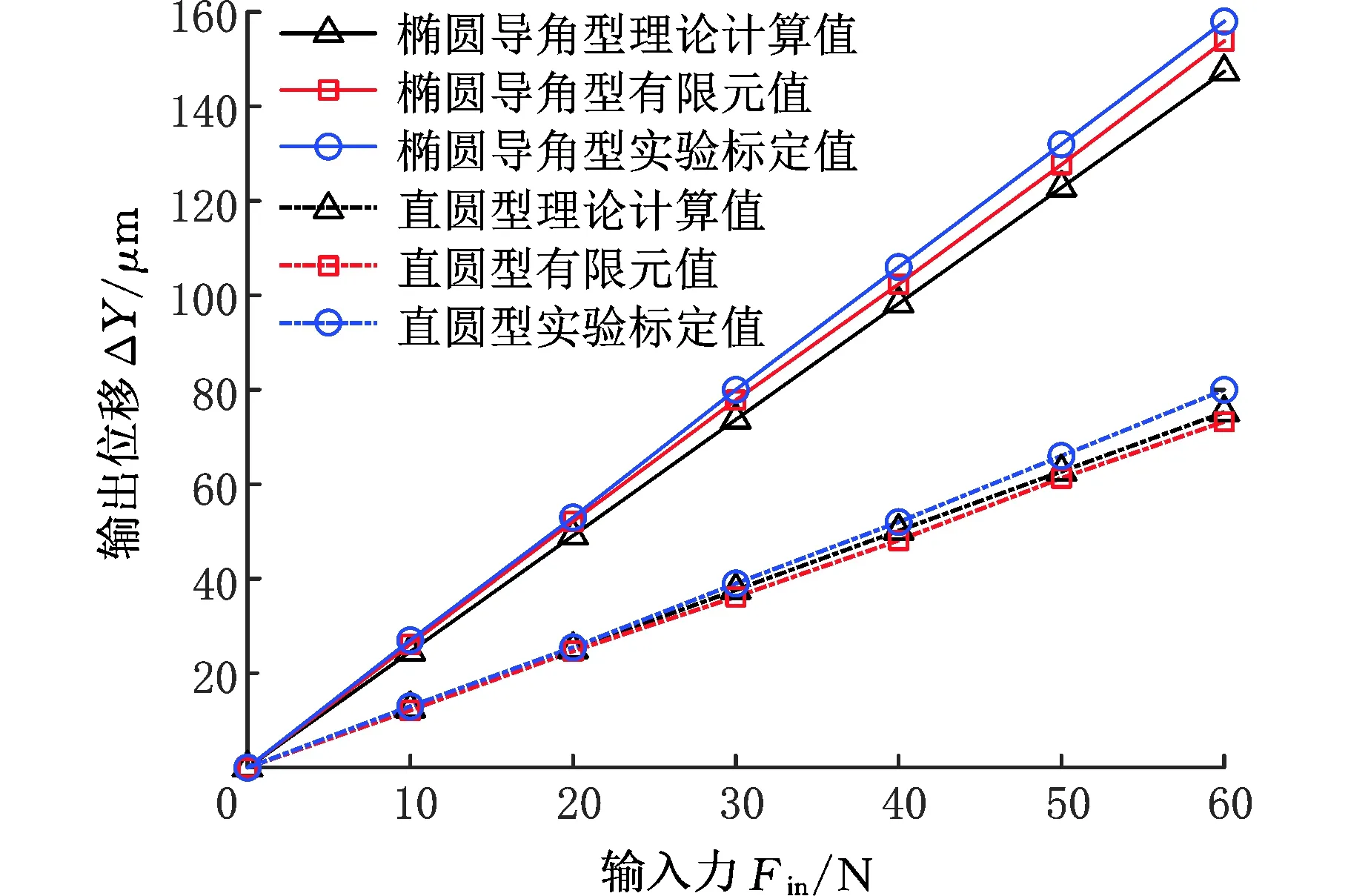
图10 柔性铰链的输入-输出特性曲线Fig.10 Input-output characteristic curve offlexure hinge
由图10可以看出,输出位移的理论计算结果、有限元仿真结果和实验标定结果三者具有较高的一致性,验证了输出位移计算公式的正确性。因为位移传感器的分辨力为0.1 μm,当柔性铰链输出位移变化量过小时,测量结果会产生舍入误差,从而导致试验机的测量精度降低。不难计算出,要产生0.1 μm的输出位移,椭圆导角柔性铰链的输入载荷为0.039 N,直圆柔性铰链的输入载荷为0.077 N,可见新型柔性铰链的大柔度特点可以提高试验机的测量精度。
输出位移的增大,也意味着应力集中现象可能更明显。对于试验机的摩擦磨损试验,柔性铰链存在高频率、周期性、重复性的变形运动,应力的大小成为零件失效的重要因素[17]。采用ANSYS进行有限元仿真,得到输入力为10 N、20 N、30 N、40 N、50 N、60 N时的最大应力,椭圆导角柔性铰链的应力分别为4.183 MPa、8.365 MPa、12.548 MPa、16.730 MPa、20.913 MPa、25.096 MPa;直圆柔性铰链的应力分别为4.179 MPa、8.358 MPa、12.537 MPa、16.716 MPa、20.895 MPa、25.074 MPa,可以发现,最大应力随载荷增大而线性增大,且两种柔性铰链的应力十分接近。定义比值系数γ为输出位移与最大应力之商,以γ表征柔性铰链在输出位移相同时应力水平的高低,γ越大,说明应力水平越低、性能越好,反之性能越差。两种铰链的比值系数γ与输入力的关系如图11所示,可以看出,不同载荷下柔性铰链的输出位移与最大应力的比值接近于某一恒定值,椭圆导角混合柔性铰链的比值系数为5.873,直圆柔性铰链的比值系数为3.001,这表明在获得相同输出位移的同时,新型柔性铰链的应力减小96%左右,这对耐疲劳柔性机构的设计具有重要的参考意义。
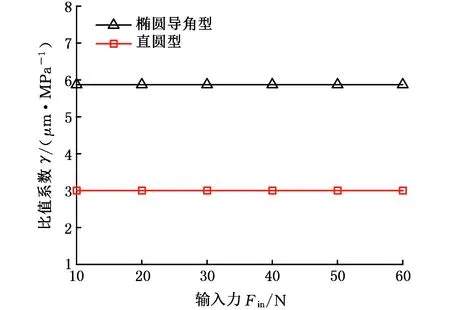
图11 比值系数与输入力的关系Fig.11 Relationship between ratio coefficient andinput load
6 结论
(1)基于混合柔性铰链的设计思路,结合低应力水平的椭圆型铰链和大柔度的导角型铰链,设计了一种椭圆导角混合柔性铰链。以卡氏第二定理为基础,建立其闭环柔度方程,考虑转动中心的漂移,推导了回转精度的计算公式,利用有限元验证了计算公式的正确性。在参数的极限条件下,椭圆导角结构演化出其他3种铰链形式:直圆导角、直圆椭圆和直圆柔性铰链,使得多种柔性铰链的柔度和回转精度的解析解合并在一组方程中,避免了不同柔性铰链柔度和回转精度的重复求解。
(2)讨论了不同结构参数对柔度、回转精度和柔度精度比的影响。分析结果表明:柔度与回转精度随参数的变化趋势相反,即通过单一参数改变来增大柔度的同时,必然导致回转精度的降低;减小最小厚度是提高柔度的最佳方式,还可以降低铰链宽度来提高柔度的大小,而通过其他参数的改变来提高柔度时,精度损失更为严重,会导致综合性能的降低。
(3)比较了文中4种柔性铰链的性能,其中椭圆导角混合柔性铰链具有最大的柔度但回转精度较低,而直圆柔性铰链具有较高的回转精度且综合性能也较优越,但柔度最小。
(4)设计了一种基于柔性铰链的摩擦磨损试验机,分析了直圆柔性铰链和椭圆导角混合柔性铰链的实际工作性能。结果表明,两种柔性铰链的最小识别载荷分别为0.039 N和0.077 N,可见新型柔性铰链有利于提高试验机的测量精度;通过定义输出位移与最大应力的比值系数,发现不同输入力下的比值系数恒定为某一常数,且在获得相同输出位移时,新型柔性铰链的应力减小96%左右。
综上,新型柔性铰链融合了椭圆型铰链低应力水平和导角型柔性铰链大柔度的特点,对大行程运放机构和耐疲劳柔性机构的设计具有重要的参考意义。
