光场三维速度和温度同步测量技术仿真分析
2021-05-18吴涛峰栾银森施圣贤
吴涛峰, 栾银森, 施圣贤
上海交通大学 机械与动力工程学院, 上海 200240
0 引 言
光学诊断技术具有高时空分辨率和非接触性等优势,已经逐渐成为精确测量流体参数的重要手段[1]。在流体动力学和燃烧诊断中,仅测量流体单个参数(如温度或速度)通常无法反映其整体属性。因
此,研究者通过组合不同的光学技术同时测量流场多个参数,以实现对流动机理的深层研究。例如,为实现低污染物排放和高功率密度,现代燃烧室通常被设计为以高度湍流的方式燃烧贫油混合物[2]。在这种燃烧条件下,流动和传热之间具有很强的耦合化学反应,需要对速度和温度进行多维联合测量,以了解这些物理量之间相互作用的机制[2]。此外,测量所得结果对于验证和进一步改善大涡模拟(Large Eddy Simulation,LES)所获得的湍流反应流数值计算结果也具有十分重要的意义[3]。
近几十年来,研究者针对流体速度和温度测量开展了大量研究。
在速度测量方面,随着粒子图像测速技术(Particle Image Velocimetry, PIV)的不断发展,非接触式精确获取流体速度场的测量手段日趋成熟[4],衍生了立体PIV(Stereo-PIV)、扫描PIV(Scanning-PIV)、数字离焦PIV(Defocusing PIV, DPIV)、全息PIV(Holographic PIV, HPIV)、层析PIV(Tomographic PIV, Tomo-PIV)、合成孔径PIV (Synthetic Aperture PIV, SAPIV)等技术。其中,Tomo-PIV是当前应用较为广泛的三维流场测速技术,但通常需要使用4~8台相机从不同角度拍摄[5],需要较多光学窗口,且校准过程较为繁琐。针对该问题,作者所在课题组与美国Brain Thurow团队分别开展了单相机光场测速技术(Light-Field PIV, LF-PIV)的相关研究[6-9],该技术所用图像采集设备结构紧凑,特别适用于受限光学空间的流动测量实验,且在一定条件下可达到与Tomo-PIV相近的测量精度。
在温度测量方面,与其他测温技术相比,基于温敏磷光粒子的测温技术具有侵入性小、适用于恶劣环境等优势[10]。该技术最早可追溯至20世纪30年代[11],目前已发展得较为完善,并且衍生出多种温度解算方法,包括基于粒子发射光线光强的测温方法(强度比测温法、绝对强度测温法)、基于粒子发射光线时间特性的测温方法(上升时间测温法和衰减时间测温法)[12]。国内外研究者对上述方法进行了对比研究,研究结果表明基于粒子衰减时间的测温方法在测量准确性和精度方面都更具优势[13-15]。
在温度和速度同步测量方面,国内外研究者将PIV技术与基于粒子衰减时间的测温法相结合开展了大量研究。Zhou等[16]以EuTTA(Europium thenoyltrifluoroacetonate)作为示温和示踪粒子进行了液滴蒸发时内部二维温度和速度分布研究(热流温度为20~100 ℃)。Schiepel等[17]将温敏粒子测温方法与Tomo-PIV技术相结合,实现了湍流Rayleigh-Bénard对流过程的同步三维温度和速度测量。
然而,上述测量技术或仅能实现二维温度和速度测量,或需使用多个相机以测量三维温度和速度,其应用场景存在一定局限。本文首次将LF-PIV(单相机光场测速技术)和基于温敏磷光粒子衰减时间的测温技术相结合,开展了磷光粒子衰减时间和温度校准实验,以得到磷光粒子衰减时间和温度的准确函数关系;在相机两帧图像曝光时间可控条件下和现有光场相机硬件条件下,进行了数字合成图像仿真、三维速度和温度解算及误差分析。
1 测量技术简介
LF-PIV与基于温敏磷光粒子衰减时间的测温技术相结合的三维速度和温度同步测量技术原理如图1所示。
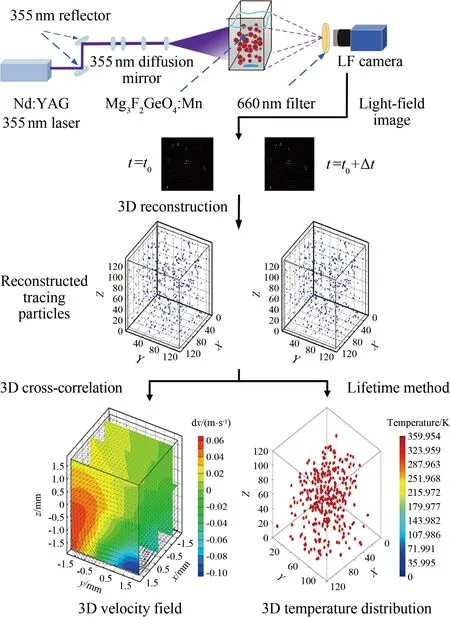
图1 三维速度和温度同步测量技术原理示意图Fig.1 Schematic of simultaneous measurement of 3D velocity and temperature
1.1 LF-PIV技术
LF-PIV技术原理[18]为:在测试区域(流体)内掺混示踪粒子,以Nd:YAG激光器照射测试区域,粒子在激光照射下散射光线;光场相机拍摄测试区域,记录下两帧不同时刻的示踪粒子光场图像;对获得的原始光场图像进行预处理,减除背景噪声,并利用基于光场相机体校准的乘积代数重建算法(Multiplicative Algebraic Reconstruction Technique, MART)[8]重构出粒子的三维强度场;最后,运用基于快速傅里叶变换(Fast Fourier Transform, FFT)的三维多重网格互相关算法[19]计算出被测流场的三维速度场分布。
1.2 基于温敏磷光粒子衰减时间的测温技术
1.2.1 测温原理
在受到激光照射时,温敏磷光粒子会向外辐射光线,且辐射光的发光光强、发光光谱和发光寿命都会随温度的变化而变化[20]。同时,温敏磷光粒子对环境不敏感,可在极端低温和高温下进行高精度、宽范围的温度测量。温敏粒子发光过程包括吸收能量、内转化、系间窜越、荧光现象、磷光现象、非辐射弛豫等6个过程[21]。磷光粒子激发后存在两个阶段[11]:第一阶段为Rise-time(上升时间),利用磷光粒子上升时间特性进行温度测量的方法即为“上升时间测温法”;第二阶段为Lifetime(衰减时间),利用磷光粒子衰减时间特性进行温度测量的方法即为“衰减时间测温法”,这种方法弥补了基于粒子发射光线光强特性测温方法的不足,被广泛应用于各领域的温度测量。
1.2.2 粒子衰减时间和相机两帧图像光强的函数关系
Yi等[12]给出了磷光粒子被激发后衰减时间与光强关系的核心公式:

(1)
式中,I(t)为t时刻的磷光粒子光强,I0为激发初始时刻的粒子光强,τ为磷光粒子的衰减时间。
基于此,Someya等[22]给出了相机两帧图像光强的计算公式:
(2)
式中,Ii为相机在Δti时长中记录的总光强,t0为相机开始曝光的时刻。
基于此,可以得出相机第一帧和第二帧图像所记录的光强分别为:

(3)
(4)
式中,t1、t2分别表示相机第一、二帧图像开始曝光时间,Δt1、Δt2分别表示相机第一、二帧图像的曝光时长。
进而可得到粒子衰减时间和相机两帧图像光强的函数关系:

(5)
由式(5)可以看出,若相机两帧图像曝光时间确定,即可通过两帧图像粒子光强比推算出粒子衰减时间。
2 校准实验
为了通过粒子衰减时间获得准确温度信息,必须获得磷光粒子衰减时间和温度的对应关系,而被测对象的温度精度很大程度上取决于磷光粒子校准实验所得到的曲线的质量[10,23]。因此,本文开展了0~70 ℃时Mg3F2GeO4∶Mn(以下简称MFG)粒子衰减时间和温度关系的校准实验。实验系统如图2所示。
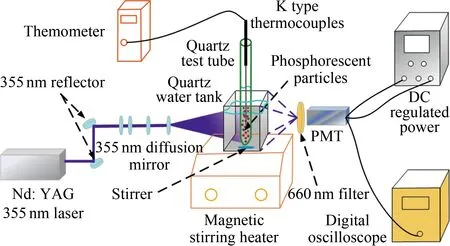
图2 校准实验系统图Fig.2 Schematic of calibration experiment
实验过程为:对装有MFG粒子溶液的石英试管水浴加热至所需温度(通过K型热电偶及温度显示器显示),以355 nm激光照射被测区域(大小为3 cm×3 cm×3 cm),同时以光电倍增管(PMT, Hamamatsu H10722-20)记录MFG粒子的衰减波形数据并以数字示波器(Tektronix,TBS1102B-EDU, 2.5 kHz)显示和保存。
实验过程中,从0 ℃开始,每隔2 ℃采集一次波形数据,每个温度下采集8组数据。数字示波器显示的粒子衰减波形如图3所示,可以看出粒子激发后的衰减时间和光强符合指数关系,与式(1)给出的关系式相吻合。

图3 数字示波器显示的粒子衰减时间波形图Fig.3 Lifetime waveform of Mg3F2GeO4∶Mn displayed by digital oscilloscope
利用获得的数据进行线性拟合(如图4所示),得到0~70 ℃时的MFG粒子衰减时间与温度的对应关系:

图4 衰减时间和温度关系图Fig.4 Relationship between lifetime and temperature
τ=-0.0088×T+5.6293
(6)
3 数字合成图像仿真分析
3.1 相机两帧图像曝光时间可控条件
在相机两帧图像曝光时间可控条件下,利用DNS[18]得到的水射流数据(设置射流温度及环境温度为均一温度343.15 K,即70 ℃,以确保不超过校准时最高温度)进行数字合成图像仿真。粒子光强采集过程如图5所示。
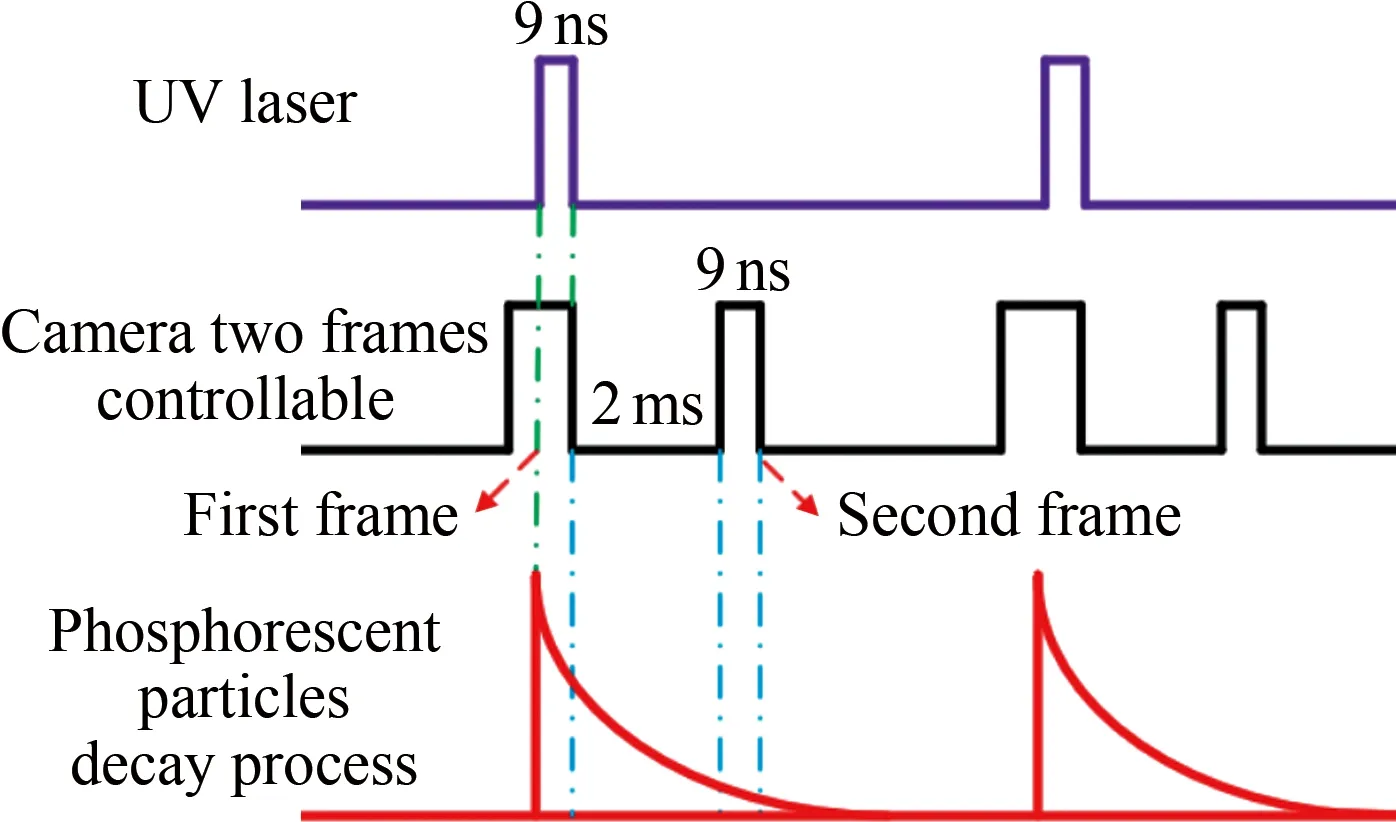
图5 相机两帧图像曝光时间可控条件下粒子光强采集过程Fig.5 Particle light intensity acquisition process under the condition of controllable exposure time of two frames of camera
DNS数据模拟的是圆形喷嘴的流动。喷嘴直径D=20 mm,雷诺数Re=2500,仿真数据抽取自距离喷嘴出口约1D处的速度场。粒子浓度为0.5 ppm(particle per microlens)。在被测区域生成第一帧粒子的空间位置,并以光线追迹算法生成第一帧合成粒子图像(具体合成过程见文献[18]),通过给定的DNS数据获得这些合成粒子所在点的速度矢量;再给定一定时间间隔,计算出第二帧粒子的空间位置并通过光线追迹算法生成第二帧粒子合成图像。DNS原始速度场、相机两帧图像曝光时间可控条件下的光场相机速度场如图6所示。速度场和温度的计算过程为:1)速度场计算:将仿真得到的两帧图像进行三维空间位置重构,获得粒子强度场分布,再运用基于FFT的两重网格互相关算法计算速度矢量,并对其进行中值滤波和线性插值等后处理以获得速度场。2)温度计算:将仿真获得的两帧粒子光场图像进行三维空间位置重构,获得粒子强度场分布,再运用连通域原理并结合式(5)和(6)解算出粒子温度。
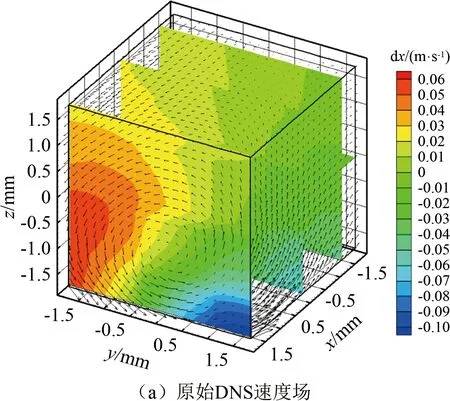
图6 相机两帧图像曝光时间可控条件下数字仿真结果Fig.6 Result of digital simulation under the condition of controllable exposure time of two frames of camera
为了定量比较DNS原始速度场与LF-PIV所计算的速度场的相似程度,本文对所获得的速度场进行了互相关系数计算,计算公式如下:

(7)
式中,R为互相关系数,v1(x,y,z)为LF-PIV计算所得速度,v0(x,y,z)为DNS原始速度。
上述仿真结果以及通过计算得到的两个速度场的互相关系数R=0.9878,表明LF-PIV速度场和原始DNS速度场的流场结构非常接近。图7(a)、(b)分别展示了X-Y-Z方向上的速度误差概率密度函数(Probability Density Function, PDF)以及平均温度误差。可以看出,在相机两帧图像曝光时间可控条件下,本文所采用的方法可以较为精确地实现三维瞬态速度和温度的同步测量。

图7 相机两帧图像曝光时间可控条件下的测量误差Fig.7 Measurement errors under the condition of controllable exposure time of two frames of camera
3.2 现有光场相机硬件条件
现有光场相机硬件参数如表1所示。其曝光时间特性如图8所示,第一帧图像曝光时间可控,第二帧图像曝光时间不可控(约212~285 ms)。MFG被激发后会持续发光,且70 ℃时的衰减时间约为2.6 ms,当粒子具有一定速度时,在两帧图像上会形成拖尾现象,如图9(c)、(d)和(f)所示;而相机两帧图像曝光时间可控时(如图5所示),由于照亮被测区域的两次激光脉冲时间很短(分别为9 ns),因此相机两帧图像记录粒子光强时间也为9 ns,此时粒子无拖尾现象,如图9(a)、(b)和(e)所示。

表1 现有光场相机硬件参数Table 1 Hardware parameters of the existing light field camera
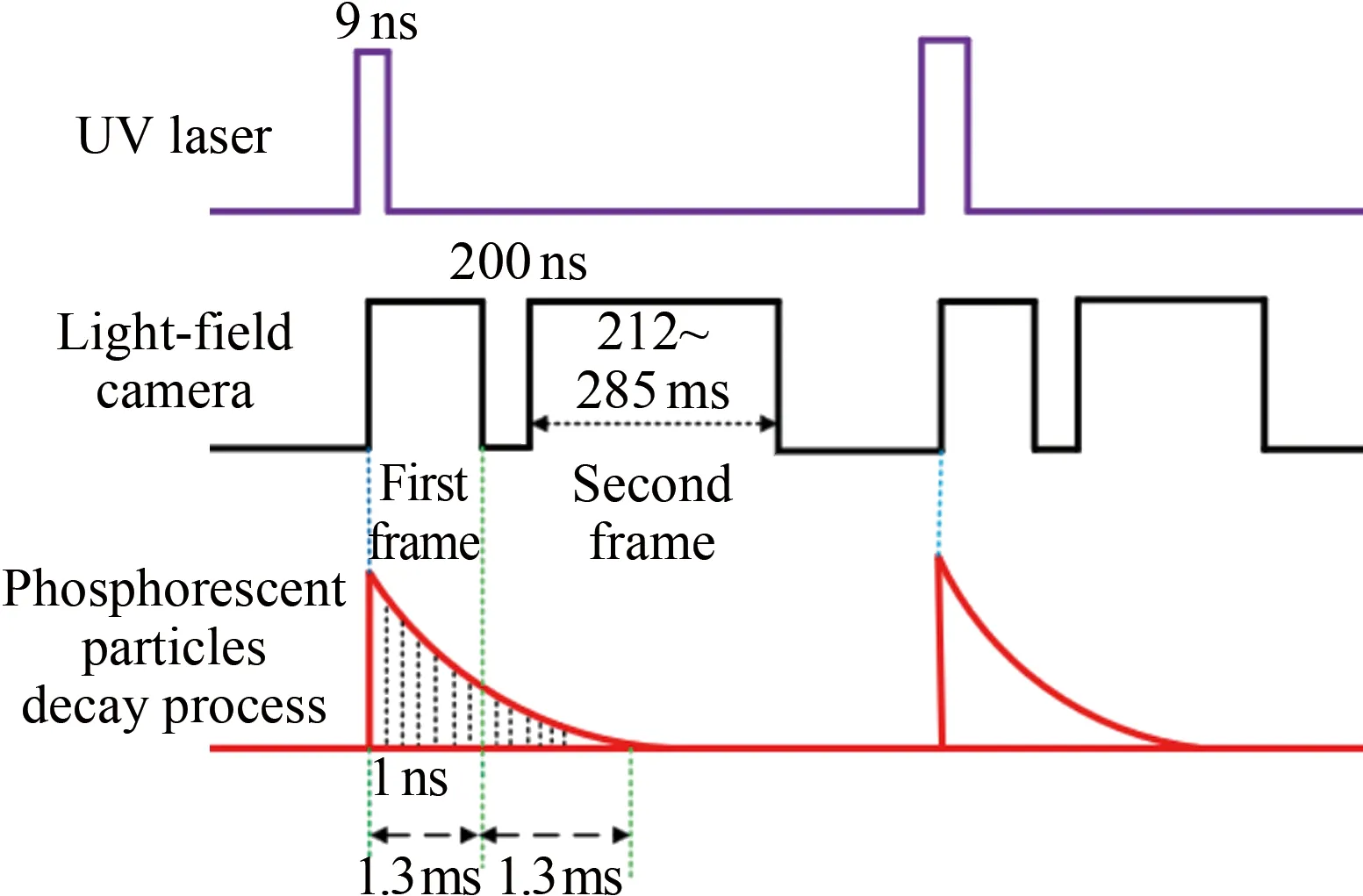
图8 现有光场相机曝光时间特性以及粒子光强采集过程Fig.8 Exposure time characteristics of existing light field camera and particle light intensity acquisition process

图9 粒子拖尾现象Fig.9 Phenomenon of particle tailing
3.2.1 现有光场相机硬件条件下可测量的速度范围
为验证现有光场相机硬件条件下本文所提出的方法的有效性,首先需要确定现有光场相机硬件条件下可测量的速度范围。依据作者所在实验室已有研究,在现有算法条件下,重构后Z方向粒子直径不能超过25个像素大小(即0.1375 mm,一个像素大小为5.5 μm)[8]。因此,必须保证记录的粒子移动距离不超过25个像素大小。若以现有的MFG粒子,根据校准实验所得到的粒子衰减时间与温度的对应关系,同时考虑加入的测量液体(水)最高温度不能超过373.15 K(100 ℃),可知,当T=373.15 K,粒子衰减时间约为2.4 ms,此时第二帧图像曝光时间最短为1.2 ms,所能测量的粒子最大移动速度vmax为:

(8)
因此,在现有光场相机硬件条件下,水溶液温度上限为373.15 K时,基于LF-PIV和温敏磷光粒子衰减时间测温法的三维速度和温度同步测量技术所能达到的最大测量速度不超过0.11 m/s。
3.2.2 仿真分析
为进一步确定现有光场相机硬件条件下可测量速度范围内所能测量最大温度时的三维速度和温度以及相应误差,进行了带有光强衰减的数字合成图像仿真及速度、温度误差分析,相关参数为:均一温度343.15 K,此时最大速度vmax不超过0.86 m/s;MFG粒子浓度0.5 ppm(此时流场测量精度较高)[8, 24];在X、Y和Z方向分别仿真了粒子移动速度为0、0.02、0.04、0.06和0.08 m/s(均一速度)的情况,此时相对于复杂流动产生的误差理论上最小。仿真示意图如图10所示,仿真参数如表2所示。

图10 仿真示意图Fig.10 Schematic of digital simulation

表2 数字仿真参数Table 2 Parameters of digital simulation
仿真过程为:在体素大小为128 voxel×128 voxel×128 voxel的区域内随机生成均一温度343.15 K(70 ℃)、速度均一分布、浓度为0.5 ppm的不同空间坐标的粒子,运用光线追迹算法[6]生成不同方向、不同速度时的两帧仿真粒子图像。温敏粒子的光强仿真过程为:先给定初始粒子激发光强I0,将每帧粒子光强图像采集时间离散化,以1 ns为间隔(如图8所示),近似仿真粒子光强连续衰减过程,通过式(1)可以获得不同时刻的粒子光强,并在CCD上记录不同时刻的粒子光强信息,之后利用式(5)和(6)即可通过两帧图像的粒子光强信息反算出粒子温度。所有仿真图像均采用工作站NVIDIA GTX 1080Ti显卡CUDA C并行运算。
仿真图像如图9(c)、(d)所示。可以看出,受光场相机曝光时间限制,粒子在两帧图像中持续发光,形成拖尾现象,与无拖尾时的粒子相比,单个粒子的大小和长度显著增加,不同位置处的粒子会相互影响甚至相互交合,使粒子的位置和具体形状难以分辨,影响之后的重构效果(如图9(e)、(f)所示),并导致最终仿真温度和速度数值与真实数值的误差增大。不同速度下的平均温度误差和平均速度误差如图11、12所示。由计算结果可知,受粒子拖尾现象的影响,平均温度误差和平均速度误差都会随着仿真粒子速度的增加而增加,且由于粒子重构时Z方向的拉长效应[8, 25],其误差比X、Y方向更为突出。
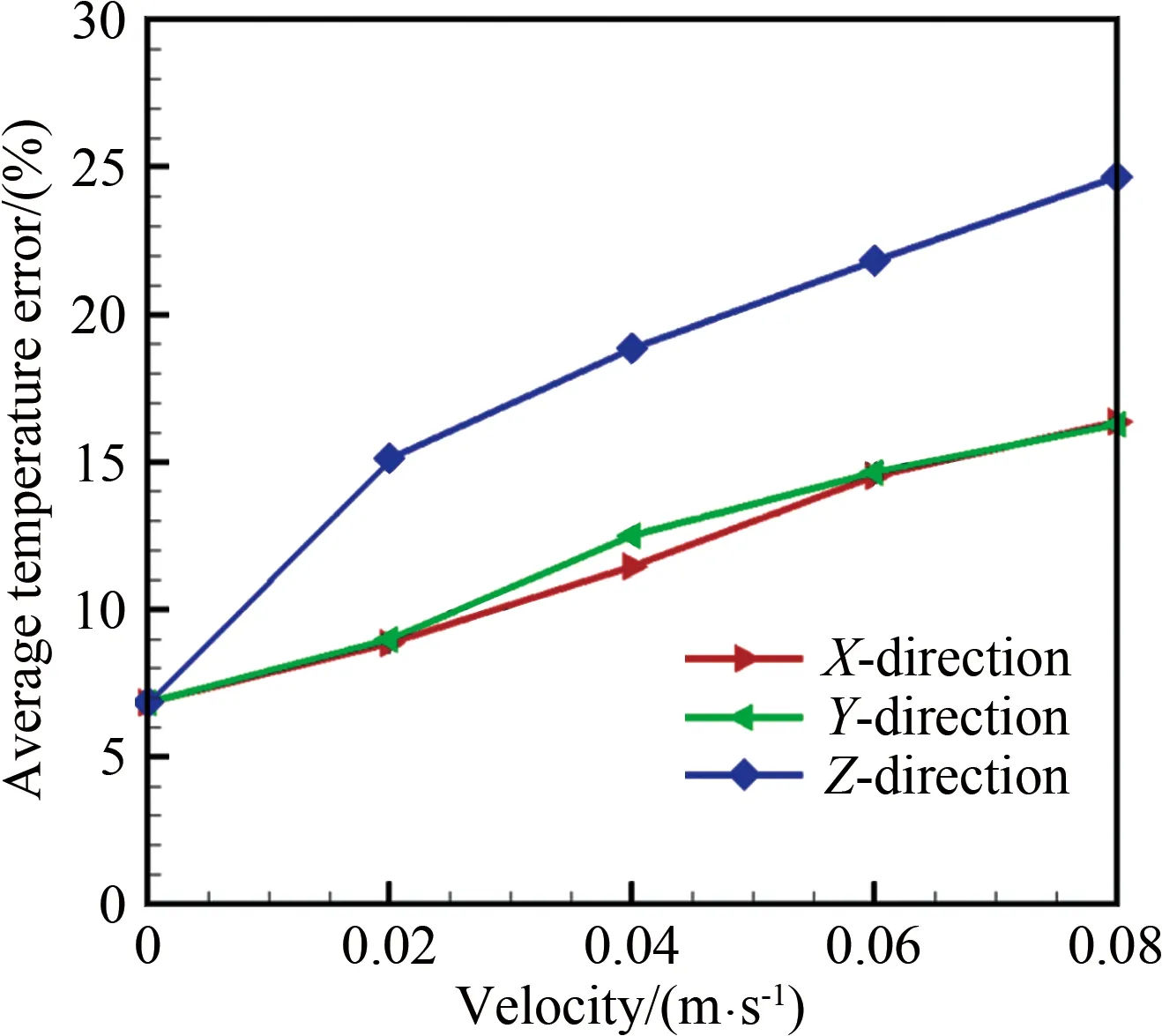
图11 X、Y、Z方向不同速度时的平均温度误差Fig.11 Average temperature error of different velocities in X, Y, Z direction

图12 X、Y、Z方向的平均速度误差Fig.12 Average velocity error in X, Y, Z direction
4 结 论
本文提出了LF-PIV(单相机光场测速技术)与基于温敏磷光粒子衰减时间的测温技术相结合的三维速度和温度同步测量技术。在相机两帧图像曝光时间可控条件下,利用单光场相机可以较为精确地实现三维速度和温度同步测量,但受现有光场相机硬件条件限制,目前可测量的速度范围较小,且由于粒子拖尾现象的影响,平均温度误差和平均速度误差偏大。
