基于模糊PI控制的牵引网低频振荡抑制方法
2021-05-13王颖杰焦岚轶倪春明
王颖杰, 邢 涛, 焦岚轶, 秦 超, 倪春明
(1.中国矿业大学 电气与动力工程学院,江苏 徐州 221008;2.大功率交流传动电力机车系统集成国家重点实验室,湖南 株洲 421001;3. 国网山西省电力公司 晋城供电公司,山西 晋城 048000;4.中煤科工集团上海有限公司 检测技术研究中心,上海 201401)
随着电气化铁路的快速发展,机车功率和密度的逐渐提升,随之出现了一系列问题,如高频谐振和低频振荡事故,因此如何维持其稳定运行至关重要。2008年,大秦线湖东机务段多台HXD1B型号机车启动时,牵引网电压出现低频振荡现象,机车无法正常入库;2010年,北京、郑州等多地的CRH5型动车组发生牵引封锁,动车组无法正常启动;2016年,徐州供电段低频振荡现象发生158次[1-5],作为我国最繁忙的铁路枢纽之一,该类型事故严重影响了铁路正常运行。低频振荡是指多列机车同时轻载启动时,牵引网电压出现3~10 Hz的振荡现象[6]。该振荡现象可能造成牵引封锁,使得机车无法正常开出,严重影响列车秩序,威胁列车运行安全[7]。
目前,低频振荡问题在产生机理和抑制方法两个方面得到了国内外专家学者的广泛关注[8]。车网耦合系统的稳定性降低会造成低频振荡,分析低频振荡的方法主要分为三类:(1)在网侧加入阻抗后建立四象限变流器数学模型分析其稳定性[9];(2)根据阻抗模型分析车网耦合系统的稳定性[10];(3)利用非线性理论分析系统的稳定性[11]。
现有的低频振荡抑制方法可分为两类。一类是改善牵引供电系统中的设备,比如文献[12]提出减小系统等效阻抗可以通过更换大容量的牵引变压器来实现,徐州机务段已使用该方法很好地抑制了低频振荡现象的发生。文献[13]提出在牵引变电所增设稳压装置,可以有效抑制网压波动。这类方法特点是投资较大,不适合大范围推广使用,因此有学者提出在机车侧进行改进,如文献[14]分析了影响车网耦合系统稳定性的各个参数,并得到通过减小变流器参数Kp抑制网压振荡的结论,但减小Kp降低了系统的动态性能。也有学者改进了传统的瞬态直接电流控制策略[15],如在变流器的控制策略中加入功率振荡环节,取得较好效果[16];文献[17]将非线性控制方法代替电压环的常规PI控制器,可以有效抑制低频振荡现象,但控制技术的设计较为复杂,提高了成本。
针对以上研究的不足,引入模糊控制器[18],提出一种基于模糊控制的低频振荡抑制策略。该控制方法有着设计简单、控制性能好和系统鲁棒性强的特点。设计模糊PI控制器,将其引入瞬态电流控制策略的电压外环控制中。
本文采用基于阻抗比的稳定性分析法,首先推导机车的等效阻抗,对车网耦合系统的低频振荡现象进行理论解释,在此基础上设计了一种基于模糊控制抑制低频振荡的方法。最后,通过对比仿真和硬件在环实时仿真实验,验证了本文所提方法的有效性。
1 低频振荡机理分析
1.1 变流器组模型
CRH系列动车组或HXD系列重载机车内的牵引变流器大多采用的是交直交结构[19],该类型变流器有着高功率因数和低谐波含量的优点。牵引变流器通过车载变压器接收牵引网的25 kV的单相交流电,经过四象限变流器整流成3 000 V的直流电,再通过逆变器和电机部分将电能转化为机械能。四象限变流器通过车载变压器直接与牵引网接触,承担了机车与牵引供电系统交互耦合的任务。在研究车网耦合系统问题时,一般将机车等效成四象限变流器,由于机车和动车组有着相同的内部结构,可以统一用变流器组来代表机车和动车组,逆变器和牵引电机用等效负载代替,四象限变流拓扑见图1。图1中,us、is、分别为变压器二次侧输出电压、电流;Ls、Rs分别为车载变压器侧等效电感、电阻;udc、idc分别为直流侧电压、电流;Rd为四象限变流器输出等效负载;Cd为直流稳压电容;iL为负载电流。

图1 四象限变流器拓扑
根据基尔霍夫定律可得四象限变流器主电路数学模型为
(1)
四象限变流器的状态空间模型为
(2)
式中:Sa、Sb分别为理想开关函数;uab为四象限变流器的输入电压。
四象限变流器采用的是瞬态直接电流控制,其中内环采用比例调节器,外环采用比例积分调节器,瞬态电流控制策略见图2。该策略将常规的双闭环控制与前馈控制结合,得到了较好的控制效果,在高速动车组和重载机车中有较多的采用。瞬态电流控制策略的数学表达式为
(3)


图2 瞬态电流控制策略
1.2 基于阻抗比的稳定性分析
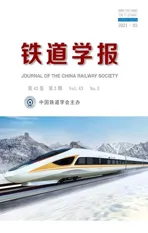
车网耦合系统中,同时处于整备阶段的多个变流器组可能会导致网侧电压低频振荡和不稳定,因此该问题的重点在于系统的稳定性分析。车网耦合系统是一个典型的级联系统,其稳定性分析常用阻抗分析法,本文也是通过牵引供电系统和变流器组的等效阻抗来分析低频振荡问题。车网耦合系统等效示意图见图3。图3中,Zs(s)为牵引网等效阻抗;us(s)为牵引网电压;ZL(s)为多个四象限变流器并联运行的等效输出阻抗。
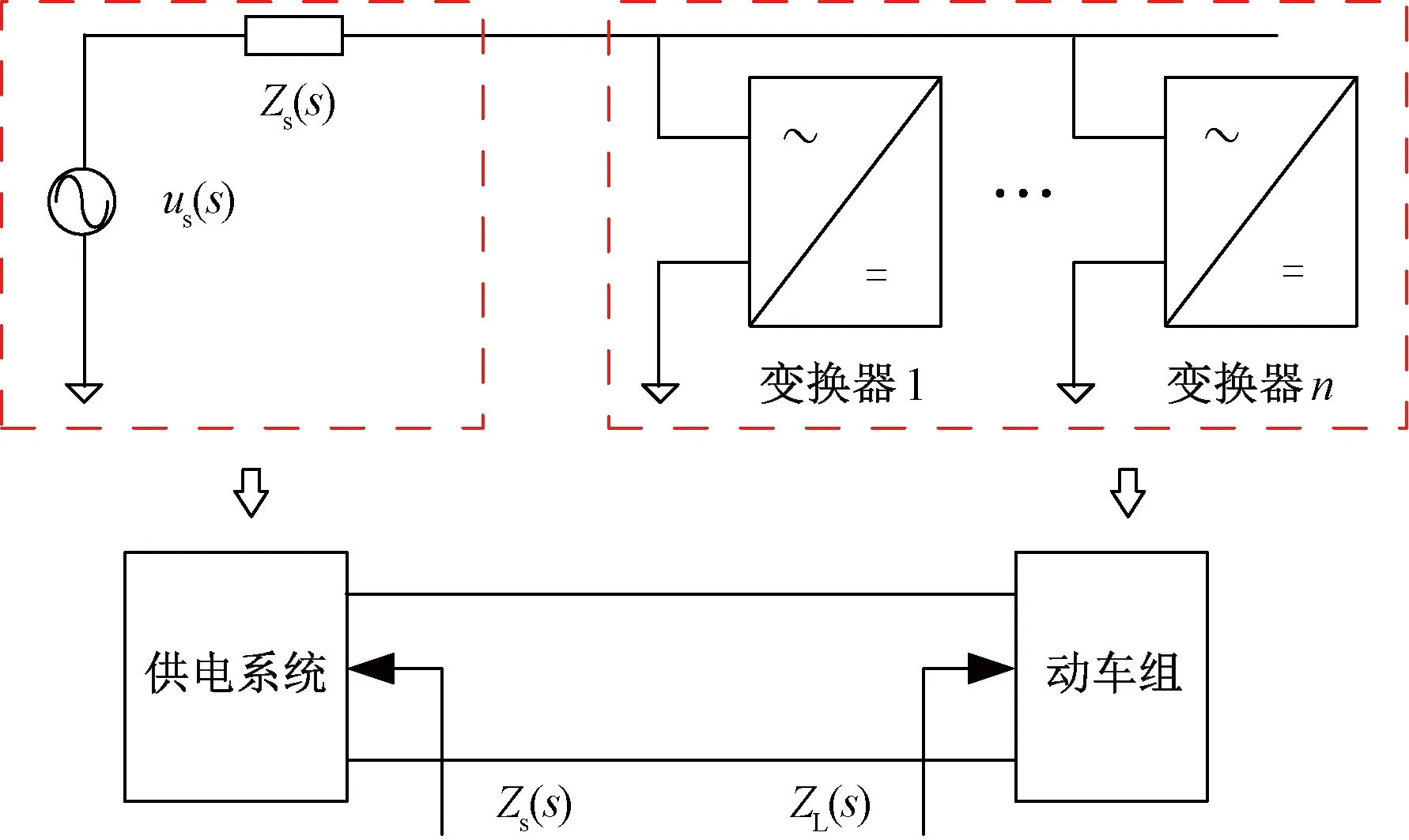
图3 车网耦合系统等效示意图
级联系统的稳定性根据阻抗比N(s)来判定:若要保证该系统稳定,需满足Middbrook稳定判据,即阻抗比N(s)≪1,则系统处于稳定状态[20]。车网耦合系统的阻抗比N(s)表达式为
(4)
1.2.1 供电系统阻抗计算
牵引供电网、电力系统和牵引变压器构成供电系统的阻抗。电力系统的阻抗表达式为
(5)
式中:Rsc、Xsc分别为区域电网在牵引变电站处的短路电阻、电抗;Ssc为区域电网在牵引变电站处的短路容量;kX/R为电力系统参数;UB为基准电压。
牵引变电所采用的是非阻抗匹配平衡变压器,牵引变压器是牵引变电所中主要电气元件,将变压器阻抗归算到低压侧,其阻抗为
(6)
得复线牵引网的等效阻抗为[9]
(7)
式中:l为牵引网变电所出线牵引网长度;r为单位长度的牵引网等效阻抗,ψ为阻抗角;ST为变压器容量;Pk为开路试验测得的功率损耗;Ud%为开路电压百分比;RT、XT分别为变压器的电阻、电抗;RJ、XJ分别为复线牵引网的电阻、电抗。
则牵引供电系统的阻抗为
Zs=Rsc+RT+RJ+j(Xsc+XT+XJ)
(8)
1.2.2 变流器组阻抗计算
由于变流器组非线性特点,其等效阻抗无法用电路定理求得,采用四象限变流器的控制框图对其进行推导。HXD2B机车中的四象限变流器采用瞬态电流控制,该策略属于双闭环控制,因此得到其控制框图,见图4。图4中,L2、C2为二次滤波回路的电感、电容;G1(s)、G2(s)分别为电压PI环节、采样延迟环节;G3(s) 为电流比例环节;G4(s) 为PWM调制的传递函数;G5(s)为阻抗参数;G6(s)变流器开关函数;G7(s)为高阶滤波函数;uL为四象限变流器输入电压;Td为载波信号周期;Tv、Ti分别为电压环、电流环采样周期;Sab为理想开关函数Sa与Sb之差的平均值,分析时取0.5。

图4 双闭环控制框图
四象限变流器的阻抗表达式为
(9)
1台动车组内有4个并联运行的变流器,为1个变流器组,同时启动的变流器组也并联运行。n台该类型的变流器组同时启动时,车网耦合系统的阻抗比N(s)为
(10)
式中:k为牵引变压器的变比。在基准参数下,改变同时运行的变流器组数目n,得到多个变流器组轻载启动时的阻抗比伯德图见图5。可以看出,随着同时运行的变流器组数目增多,车网耦合系统的阻抗比增大,逐渐靠近0 dB,见图5(a),这会造成系统的稳定性下降。

图5 多个变流器组轻载启动时的车网耦合系统阻抗比伯德图
变流器内部参数决定变流器组的等效阻抗,可以通过改变变流器的电压环参数来提高系统的稳定性。在基准参数下,改变电压环中的Kp参数,得到多个变流器组同时轻载启动时车网耦合系统的阻抗比伯德图,见图6。可以看出,减小Kp参数可以将阻抗比幅频特性曲线的尖峰下移,见图6(a),车网耦合系统的稳定性得到了提高。

图6 Kp取不同值时,车网耦合系统阻抗比伯德图
图6中的pu表示标幺值,在基准参数下改变电压外环参数KP大小。
变流器组不仅需要在整备阶段稳定工作,而且需要在额定负载时得到较好的控制效果。取不同的Kp值,得到额定负载下四象限变流器的闭环伯德图,见图7。可以看出随着Kp值取值变小,极大地减小了系统的带宽,使得其动态响应变慢,见图7(a)。因此通过减小Kp虽然提高了轻载工况下车网耦合系统的稳定性,但是会降低额定负载工况下四象限变流器的动态性能。
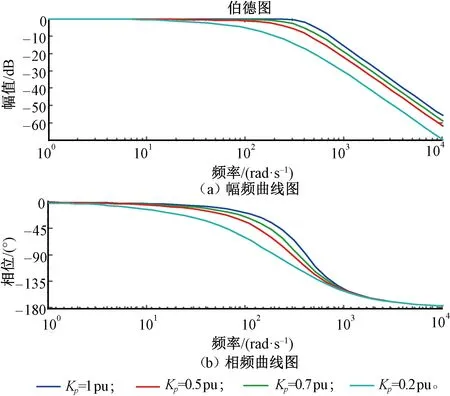
图7 Kp取不同值时,四象限变流器的闭环伯德图
变流器组是一个非线性、多变量、强耦合系统,对参数的变化比较敏感,而电压外环采用PI控制无法满足不同工况下变流器组运行的要求。模糊PI控制器不需要控制对象的精确数学模型,而且有较好的鲁棒性,因此可以将模糊PI控制器引入到瞬态电流控制策略的电压外环控制中。
2 基于模糊控制的瞬态电流控制策略
本文设计了一种基于模糊控制的瞬态电流控制策略,即采用模糊PI控制器替代瞬态电流控制外环中的PI控制器。由于机车和动车组中变流器的结构相同,与变电所的接线形式相同,所以此方法可以用于机车和动车组中来抑制牵引网中的低频振荡现象,见图8。

图8 基于模糊PI的瞬态电流控制框图
由图8可见,模糊PI控制器的输入为直流侧电压误差e和误差变化率de/dt,输出为PI参数的调整量ΔKp、ΔKi。模糊PI控制器可实时调节PI参数,使得系统得到较好的动态性能和稳态性能。
模糊PI控制器的基本结构图见图9,分为模糊化、模糊推理和去模糊化三部分。图9中,e、ec分别为误差、误差变化率;Kp、Ki分别为比例、积分参数; ΔKp、ΔKi分别为比例、积分参数的变化量;Kp0、Ki0分别为比例、积分参数的给定值。模糊PI控制器选择统一模糊论域的范围为[-3,3],其隶属度函数由S型隶属度和三角形隶属度函数共同构成,见图10。图10中,NB、NM、NS、Z、PS、PM、PB分别表示负大、负中、负小、零、正小、正中和正大。

图9 模糊PI基本结构图
图10 隶属度函数图
模糊推理规则是模糊控制器的核心,确定合适的模糊推理规则对控制效果至关重要。其推理规则的设计主要依据以下两点:
(1)控制系统的动态性能由比例环节决定。一旦当电压误差e产生,P环节会立即产生作用来抑制偏差。比例参数越大,控制输出量越大,则系统的动态响应越灵敏;比例参数取值过小会使得系统的动态性能变差。注意, 比例参数不能过大,否则会导致系统失稳。
(2)控制系统的稳态误差主要通过积分环节来消除。积分参数越大,消除稳态误差的速度越快;反之,积分参数过小,达到给定值的时间增加。积分参数过大会使响应超调过大甚至系统失稳。
考虑到PI参数对系统性能的影响,总结调试经验并进行大量仿真调试后得到了ΔKp和ΔKi模糊推理规则,分别见表1、表2。

表1 ΔKp模糊规则表

表2 ΔKi模糊规则表
3 仿真分析
本文的研究对象选取的是CRH3型动车组,其仿真的相关参数见表3。

表3 仿真参数表
3.1 基于瞬态电流控制的仿真分析
本文在SIMULINK平台的基础上搭建了车网耦合系统模型,并进行了变流器组额定负载运行和模拟整备工况即轻载运行的仿真,见图11。

图11 额定负载仿真
首先做额定负载下变流器组运行的仿真,仿真中用10 Ω电阻来模拟负载。图11为采用瞬态电流控制策略的变流器组在额定负载下,四象限变流器的直流侧电压波形和交流侧电压、电流波形。最终,直流侧电压在0.3 s达到基本稳态,且交流侧电压和电流同相位,可以保持单位功率因数运行。
低频振荡事故一般发生在变流器组的静置整备阶段,变流器组处于空载或带辅助系统运行的小功率阶段,该阶段机车内部逆变器和电机均不工作。本文做了1个变流器组和多个变流器组的轻载启动仿真用以模拟机车的整备阶段,仿真中设置负载电阻为1 000 Ω,仿真结果见图12。

图12 轻载运行仿真结果
图12(a)是1个变流器组轻载启动时机车侧的电压和电流波形,可以看出电压和电流在启动初期出现振荡,但电压在1 s内恢复稳定,变流器组可以稳定运行。但是轻载仿真中,无法保证同相位,此时基波电流幅值为160 A左右。图12(b)是6个变流器组轻载启动时机车侧的电压和电流波形,可以看出电压和电流出现振荡且3 s内振荡没有衰减,此时可能使得变流器组发生牵引封锁。
3.2 基于模糊PI的瞬态电流控制的仿真分析
将基于模糊PI的瞬态电流控制应用在变流器组的四象限变流器控制中,作为对比,同样做了额定负载和轻载工况下的仿真,见图13、图14。图13为额定负载下,1个变流器组中四象限变流器的直流侧电压波形和交流侧电压、电流波形。最终,直流侧电压在0.1 s基本稳定,且交流侧电压和电流同相位,可以保持单位功率因数运行。

图13 额定负载运行仿真结果
图14是6个变流器组同时轻载启动时牵引网的电压和电流波形。可以看出网侧电压和电流的低频振荡现象得到明显抑制,仿真中继续添加变流器组,8个变流器组仍可保持稳定。

图14 6个变流器组轻载启动仿真
4 硬件在环实验
由于车网耦合系统中包含大量的电力电子器件,实物实验不太现实。因此本文基于RT-LAB实时仿真器和NI-Crio 9030控制器搭建了硬件在环半实物仿真平台。
仿真平台主要设备有:RT-LAB半实物仿真器、示波器、PC机、NI Crio-9030控制器、9220采样板卡、9 401发波板卡、DB37转接板等。其中RT-LAB仿真器模拟了车网耦合系统的拓扑部分;NI-Crio9030控制器实现四象限变流器的控制环节。
在硬件在环实时仿真平台的基础上,本文分别做了常规的瞬态电流控制策略下、基于模糊PI的瞬态电流控制策略下多个变流器组轻载启动的实验。图15(a)是常规的瞬态电流控制策略下,6个变流器组轻载启动时机车侧电压、电流波形,可以看出交流电压有明显的振荡,大约为7 Hz。

图15 6个变流器组轻载启动的机车侧电压、电流波形
图15(b)是基于模糊PI的瞬态电流控制策略下,6个变流器组轻载启动时机车侧电压、电流波形,此时机车侧电压的波动得到抑制,基本处于正常范围内,不会发生牵引封锁现象,保证了变流器组运行的稳定,实验结果验证了本文提出的振荡抑制方法的有效性。
5 结论
本文对车网耦合系统中的低频振荡问题进行了研究,提出了一种基于模糊PI的牵引网低频振荡抑制方法。首先用基于阻抗比的稳定性分析方法对车网耦合系统进行了分析,得出常规的PI控制器无法解决机车在多车升弓整备下运行的实际需要。在此基础上,本文使用模糊PI控制器代替电压环的PI控制器,设计了基于模糊PI的瞬态电流控制策略,并介绍了模糊PI控制器的设计方法。最后通过仿真和实验分别验证了该策略的有效性。
(1)多个变流器组同时整备运行时,机车侧的等效阻抗减小,导致车网耦合系统的阻抗比幅频曲线接近0 dB,系统稳定性变差,出现了低频振荡现象。
(2)由于变流器组需要在不同工况下运行,这使得常规PI控制器无法既保证系统的快速性能,又满足系统稳定运行的要求。
(3)基于模糊PI的瞬态电流控制策略有着较好的鲁棒性能,能够在不同工况下保证车网耦合系统的运行要求。