基于双目机器视觉的高速高精度自动贴屏机设计
2021-05-12张亚萍李曙生
张亚萍,李曙生
(泰州职业技术学院,江苏 泰州 225300)
贴屏工序是手机产品生产中的关键工序,直接影响产品的美观和销售。手机贴屏方式分为人工贴屏和自动贴屏两种,相对于人工贴屏方式,自动贴屏方式精度高、效率高、稳定性及平稳性高,能有效劳动强度低和生产成本低,备受工业应用领域青睐。
随着智能手机贴屏精度和效率要求的不断提升,对高速高精密智能贴屏设备的需求越来越迫切,在一定程度上已成为影响贴屏精度的技术瓶颈。我国一些高校和科研院所也在这方面开展了研究,特别是在图像处理、视觉算法等方面取得了较多的研究成果。吕金隆[1]基于LabVIEW 技术开发机器视觉伺服系统的通用性平台,并通过PCB 板自动定位检测系统对设计开发平台进行测试,但产品最终定位精度并没有在实际生产设备上进行验证。张振亚[2]利用改进的RANSAC算法对LCD 边缘点进行直线拟合,得到特定品牌屏幕组件和电池外壳组件之间的位置关系。解杨敏等[3]对PCB 板标记点和元件图像进行识别定位研究,但是图像算法并不适用于高速贴片机。李俊蒂等[4]利用两个固定的单目摄像头对两屏进行图像采集图像误差率限制在2%以内,三维误差率限制在0.02cm 以内,但此图像算法并不适合精度贴屏机和表面弯曲、不规则的物体的贴合。柴钰[5]以形状不规则的订书机为研究对象,采用单目视觉实现目标姿态识别和二维质心定位及确定旋转角度,将改进后的算法与机器视觉结合集成在MATLAB GUI 系统中,得出位姿的识别率为92.5%,在x方向和y 方向的平均绝对误差值分别为3.3710mm 和4.0106mm,角度的平均绝对误差值为4.17°。这些研究虽针对了视觉伺服系统、机器视觉算法,但仍难满足自动贴屏设备的高速高精度的贴屏要求。
本文以智能手机为研究对象,采用双目视觉系统实现目标姿态识别和二维中心定位及角度旋转,将机器视觉技术、伺服驱动技术以及精密传动技术三者结合,提出了一套完整的高速高精度手机自动贴屏解决方案。
1 系统硬件平台设计
本手机贴屏机选用CCD 图像传感器(以下简称为“CCD贴屏机”),CCD贴屏机整体结构如图1所示,主要由显示器、伺服驱动系统、机器视觉系统、精密对位系统等组成。显示器主要用于设备运行状态监控及操作过程内容显示;伺服驱动系统包括工控机、伺服驱动器、执行元件等,借助Labview软件实现对运动平台的控制,通过调用固高控制板提供的DLL 函数库,实现对伺服运动装置和机械传动机构的运动控制以及对压力传感器、霍尔传感器等输入输出元件的信号采集和实时控制;机器视觉系统包括工业相机、光源及视觉处理软件,借助视觉算法软件NI vision development module 和相机驱动软件NI-IMAQ for USB Cameras,完成图像采集、图像预处理,快速提取图像边缘信息并准确快速计算XY轴向偏差和R向角度偏差;精密对位系统包括XY向直线电机及R向DD 马达,根据计算出的XY 轴向偏差和R 向角度偏差完成XYR向的对位调整。

图1 CCD贴屏机整体结构
该设备操作简单快捷。首先将手机放入到载具中,载具夹紧气缸夹紧定位,载具上的吸盘吸附手机,同时为相机拍照定位提供光源;然后Z轴伺服模组下移接触屏幕吸附屏幕,相机自动调节位置,保证焦距对准手机待贴合屏幕位置;接着采用两个CCD 工业相机分别采集手机和手机屏幕图像,经过图像预处理和目标识别定位后,计算出对位平台XY向水平移动距离以及旋转平台R向旋转距离,最后由伺服驱动控制系统和精密传动控制系统完成自动定位和自动贴屏操作。
(1)Z1/Z2 轴伺服驱动模块。Z 轴伺服驱动模块如图2 所示,主要包括伺服电机、编码器、滚珠丝杠螺母副、支撑板等。Z1轴伺服驱动模块用于控制机架组件的Z 向移动,在机架组件左下角和右上角各安装有一个工业相机,当需要摄像时,由该模块驱动相机移动至拍照点取像。Z2轴伺服驱动模块用于控制吸盘组件的Z 向移动,定位精度达到0.008mm。
(2)机架组件。机架组件如图2 所示,整体为几字型结构,包括X轴调整轨道和Y轴调整梁,通过L 型转接组件将边线CCD 检测组件连接在其上滑动,可灵活调整检测组件相对于载具的位置;检测组件用于检测手机和屏幕边线,实现图像自动采集和识别,主要包含两个工业相机和相机光源,属于机器视觉系统的核心部件,其将物体的光信号转换为电信号输入到计算机进行相关处理,而相机镜头的质量直接关系到整个视觉系统测量精度,其将物体的信息映射到传感器上。现今,比较主流的图像传感器有CCD(电荷耦合元件)和CMOS(金属氧化物半导体元件)图像传感器两种,CCD 传感器采用PN 结隔离层来隔离噪声,故噪声少、像元尺寸小以及光的灵敏度高,本设备选用CCD图像传感器,相机精度为0.008mm。
(3)吸盘组件。吸盘组件如图2 所示,负责吸取和下压手机屏幕,其上下运动由Z2轴伺服驱动机构控制。在吸盘组件上安装有两个压力传感器,其中一个用于检测吸起屏幕时的吸力大小,以防止因压力不足不能可靠地吸起屏幕;另一个用于检测下压贴屏时压力,以防止因压力过大压坏屏幕或因压力过小屏幕贴合不实。
(4)载具和仿形托盘组件。载具组件如图3所示,安装在对位和旋转平台上方,用于承载固定手机,当手机型号变化时,只需要改变载具就能满足其他产品的加工要求。仿形托板组件,通过支撑立柱和环形支撑板支撑至靠近载具水平高度的位置,数量为两组,对称地设置在载具的两侧,每一组包括一个滑动气缸和固定在滑动气缸上的仿形托板,从而在载具的两侧托起手机屏幕,之后吸盘组件在Z2轴的驱动下吸附托盘上的手机屏幕,为屏幕摄像做好准备。
(5)对位及旋转平台。对位及旋转平台如图3所示,是贴屏设备中的关键部件,负责依据机器视觉系统位姿偏差计算结果自动调整手机在水平面内X 向和Y 向位置以及空间R 向圆周位置,调整精度直接影响贴屏精度。本设备XYR 模组中R向采用DD 马达控制,相对于普通传统机构,DD马达采用直接驱动的安装方式,由于省去了减速机、联轴器、齿轮等中间环节,间隙误差和机械磨损误差被减为最少,并且它的伺服刚性也可以随时修正误差,定位精度较传统的伺服控制定位模组提高一个数量级,达到0.002mm。
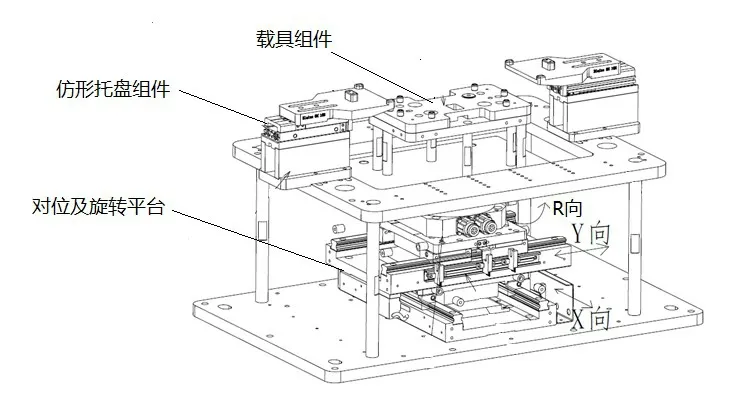
图3 操作平台局部结构
2 自动识别定位流程设计
自动识别定位操作主要完成相机取像、相机标定、相机抓边信息处理、对位坐标计算、计算结果发送等工作,自动识别定位流程如图4所示。

图4 贴屏自动识别定位流程
3 机器视觉系统对位计算程序设计
程序编制中采用取像工具(CogAcqFifoTool1)获取图像,通过调节曝光、亮度、及对比度参数来调整图片效果,曝光值越大,图片越亮;采用空间定位工具(FixtureTool)输出定位空间,图形训练工具(PMAlignTool)查找产品共同特征,以完成图形特征的快速查找;采用找线工具(Find-LineTool)寻找产品边缘,在寻边过程中,通过调整找线工具的卡尺数量,搜索长度,投影长度,搜索方向,对比度阈值,过滤一半像素等参数确保找到线的准确性;采用标定工具(CogCalibNPointToNPointTool)分别对2 个相机进行九点标定,以确定相机与伺服之间的坐标关系以及相机之间的距离,标定结束后将结果导入模板,。部分对位程序计算如图5所示。
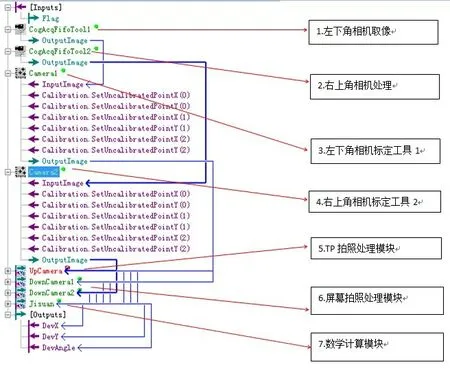
图5 贴屏识别定位部分程序
4 结语
从设备测试的结果看,该设备定位精度≤±0.005mm,重复定位精度≤±0.005mm,贴屏速度≥300 片/小时,屏幕贴合平整度≤±0.005mm,贴屏精度和效率大幅提升,基本满足了工业应用领域对高速高精度贴屏设备需求。同时,该设备机器视觉系统能够快速进行模板识别,简单直观的操作界面,可快速设定调整机器操作程序,针对不同形状尺寸的电子产品只需换载具,即可应用于其他型号电子产品的贴屏工序,设备柔性化和通用化程度大幅提升。
