自动驾驶车辆道路测试场景评价方法与试验验证*
2021-05-12孙亚夫
王 荣,孙亚夫,宋 娟
(1. 工业和信息化部计算机与微电子发展研究中心(中国软件评测中心),智能网联驾驶测试与评价工业和信息化部重点实验室,北京 100048;2. 北京千方科技股份有限公司,北京 100085)
前言
以自动驾驶车辆(包括智能汽车、无人驾驶汽车、智能网联汽车等)为例,在自动驾驶技术的发展和智能网联汽车商业化应用的迫切需求下,自动驾驶车辆道路测试显得极为重要。通过对自动驾驶车辆进行道路测试,既可以对新技术进行测试验证,促进技术发展,还可以检验自动驾驶车辆的安全性[1-2]。
基于道路场景的车辆测试方法是目前主流的车辆测试方法。例如美国公路交通安全管理局(NHTSA)预碰撞场景、美国交通部(DOT)和Waymo核心驾驶能力的测试项目和场景[3]。德国政府研究事故场景,在电子地图上表示事故类型、交通类型和事故严重程度[4]。欧盟梳理潜在的和真实事故场景与特征,总结人工和自动驾驶关键场景[5]。我国发布的《智能网联汽车道路测试管理规范(试行)》规定自动驾驶功能检测项目。中国智能网联汽车产业创新联盟和全国汽标委针对此《管理规范》细化的检测项目与场景[6-7]。中关村智通智能交通产业联盟发布《自动驾驶车辆测试道路要求》,对测试道路进行分级[8]。北京理工大学张昕等[9]提出基于信息熵的特殊区域环境复杂度计算模型。吉林大学王云鹏等[10]提出定量评价交通环境因素的方法。在现有技术中,场景复杂度模型没有针对自动驾驶汽车的自身数据进行综合分析,场景分类也大多基于自动驾驶功能、事故等维度,没有区分不同类别场景的难易度或复杂程度,从而无法依据分类选取出适用于自动驾驶道路测试的典型场景。因此,现阶段自动驾驶车辆须进行大量的场景测试来验证自动驾驶能力,测试效率和测评效果均有待提升。基于现有技术,研究场景评价与分类方法是自动驾驶车辆道路测试亟需突破的难点之一[11-12]。
本文中提出了一种自动驾驶车辆道路测试的场景评价与分类方法,以解决现有技术存在的无法区分不同道路测试场景的复杂度,更无法依据分类选取出适用于自动驾驶道路测试的典型场景,测试效率和测评效果均有待提升的问题。通过确定一个或多个预先创建的道路场景,并确定为创建道路场景所采用的场景组成要素;获取场景组成要素所对应的信息,将场景组成要素划分为静态场景要素和动态场景要素;进一步计算静态场景要素和动态场景要素分别对应的场景复杂度,综合得到道路场景所对应的场景复杂度分值。最后,根据道路场景所对应的场景复杂度分值实现对场景的分类,使最终得到的分类结果既能体现出不同道路场景的复杂程度,又能体现出不同道路场景的类别,本文中提出的道路场景评价与分类方法能大幅提升测试效率和测评效果。
1 场景设计方案
基于国际、国内自动驾驶测试场景标准规范、道路交通事故场景和国家智能汽车与智慧交通(京冀)示范区的测试经验[13],建立智能网联汽车道路测试场景要素库,通过选取基本要素与要素组成,从功能和逻辑等维度进行梳理组合,提取自动驾驶测试场景。
1.1 场景组成要素库
通过分析标准规范场景,包括ISO、NTHSA、SAE、ENCAP、FMCSA 和ADAS 场景[14-18],结合网络事故视频、公安交管道路交通事故数据和事故还原等道路交通事故和人为驾驶经验,将自动驾驶车辆道路测试场景要素库划分为静态场景要素和动态场景要素。其中静态要素包括路段、车道、道路交通标志、道路交通标线、交通信号灯、其他设施和天气,动态要素包括场景参与者。场景要素库见表1。

表1 自动驾驶车辆道路测试场景要素库
1.2 测试场景的提取
根据上述场景要素库中的组成要素,从功能、逻辑等维度进行梳理组合,自动驾驶功能包括直行、跟车、变更车道和路口左转等,逻辑维度是在功能研究的基础上,考虑自然环境条件、道路属性和运动状态等,进而划分为不同时间、不同天气状态、道路等级和道路长度等,设计形成测试场景[19],如图1 所示。
1.3 测评场景
根据上述方法设计道路场景,参考T/CMAX116-01-2018《自动驾驶车辆道路测试能力评估与方法》[20],从自动驾驶车辆认知与交通法规遵守能力、执行能力、应急处置与人工介入能力和综合驾驶能力等方面,设计搭建50 组城市道路测评场景,如图2所示。

图1 自动驾驶车辆道路测试场景的提取
2 场景评价与分类方法
提出场景复杂度模型,它是根据道路交通环境的影响因素,建立一个评估道路交通环境复杂程度的评价模型,用来反映道路交通环境的参与者和其所处的交通环境之间的相互作用关系。进一步通过场景评价方法进行场景分类,可以分为简单、中等和复杂3 个等级的环境测试场景。场景评价与分类流程如图3 所示。
场景评价理论主要基于场景复杂度,它是指自动驾驶车辆道路测试评价场景的复杂程度,在研究道路交通环境影响因素时仅考虑周围环境对自动驾驶车辆造成的其他交通参与者、路段、标志标线等相关影响因素,不考虑风向、温度湿度、树木抖动等自然条件。场景复杂度是一个相对的概念,不会离开自动驾驶车辆而存在,是一个随着因素变化而变化的变量,在道路交通环境测试中会随着距离、速度等因素的变化而变化。
本文中将自动驾驶车辆道路测试场景复杂度分为静态场景复杂度和动态场景复杂度,其中静态场景复杂度引入信息熵理论,计算离散信息源的信息量总和,考虑静态场景要素的类型和权重;动态场景复杂度引入加速引力模型,考虑场景参与者和测试车辆之间的距离、速度等的相互影响因素[21-23]。场景复杂度由静态场景复杂度和动态场景复杂度的综合评价结果得到,场景复杂度如图4所示。
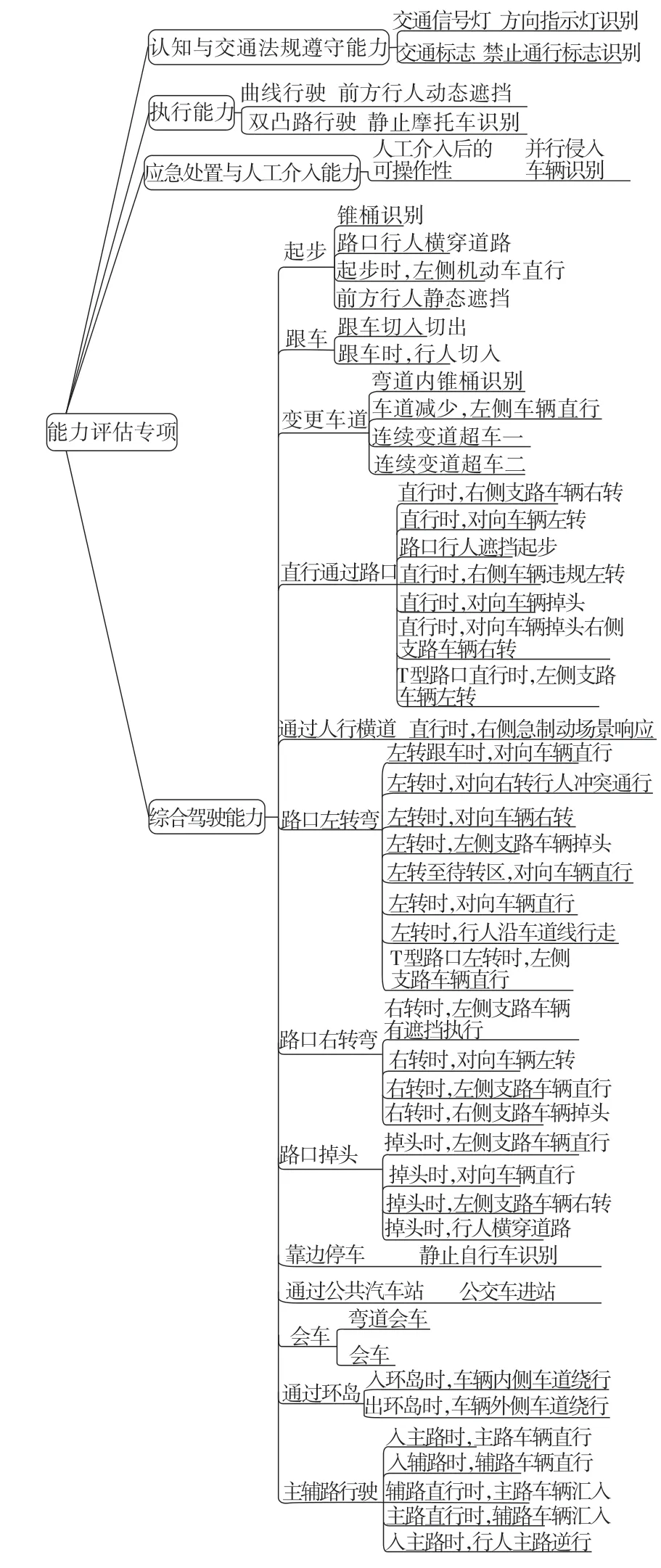
图2 50组城市道路交通场景
2.1 静态场景复杂度
静态场景复杂度引入信息熵理论确定静态场景要素的信息熵,考虑静态场景要素的类型和权重。静态复杂度系数(信息熵)计算公式为

式中:θ1为静态场景复杂度系数;h为静态场景复杂度中各个场景组成要素所对应分组标签的类型总数;pi为根据静态场景复杂度构建的图形结构中相同类型节点数与节点总数的比值。
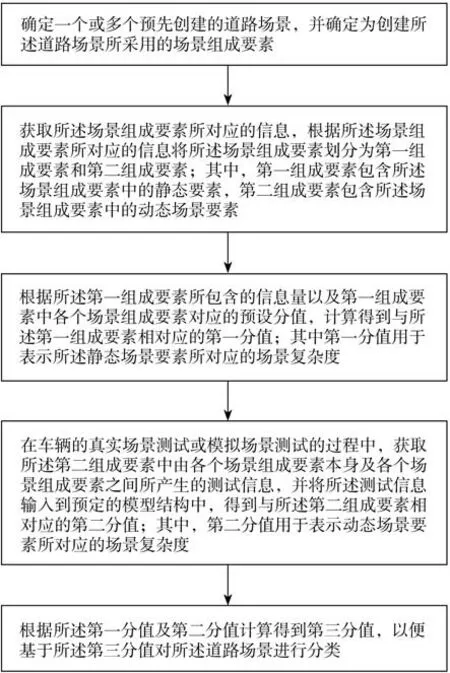
图3 场景评价与分类流程示意图

图4 自动驾驶车辆道路测试行为评价场景复杂度
不同静态环境要素权重根据专家打分确定:

式中:C0为静态场景复杂度;βn为静态场景组成要素中第n个分组所对应的权重;Yn为静态场景组成要素中第n个分组内各个场景组成要素所对应的预设分值之和。
2.2 动态场景复杂度
基于引力模型研究,提出动态场景复杂度与场景中的动态因素有关,复杂度与测试车辆和场景参与者的速度、两者之间的距离与夹角等存在某种数学函数关系。将动态因素对测试车辆的影响作用视为环境复杂度的场效应机制,测试车辆与场景参与者之间的相对速度与距离作为衡量场强度的指标,对环境复杂度的场分布进行数学描述,将动态因素进行抽象概括。根据测试车辆属性与交通参与者属性初步形成具有场效应的复杂度引力模型结构体系,其模型的基本形式为

式中:C1为动态场景复杂度;K1为测试车辆的属性值;K2为交通参与者的属性值;c为常数。
测试车辆的属性值的计算公式为

式中:a为常系数,为调整模型规范的一个常数;t1为测试车辆的反应时间;v1为测试车辆的行车速度;d1为测试车辆与交通参与者的距离;θ为测试车辆与其他交通参与者之间的夹角。
交通参与者属性值的计算公式为

式中:p为常数;t2为交通参与者的被感测时间;v2为交通参与者的速度;d2为交通参与者的运动距离。
根据静态场景复杂度和动态场景复杂度计算得到道路测试场景的复杂度,即

式中C为道路测试场景复杂度。
3 场景评价与分类的试验研究
从设计搭建的50 组自动驾驶车辆道路测试场景中选取10 组典型场景,通过开展实车试验研究,搭建测试环境、采集并分析试验数据,旨在对自动驾驶车辆道路测试场景评价方法进行验证。
3.1 试验准备
3.1.1 测试车辆
测试车辆选用Tesla Model S,在测试车辆上安装激光雷达、摄像头、工控机、惯导等测试设备,测试车辆与设备见图5。

图5 Tesla Model S和测试设备
3.1.2 交通参与者
(1)背景车
交通参与者是3 辆背景车:上汽大通T60,长×宽×高为5 365 mm×1 900 mm×1 809 mm;华晨金杯,长×宽×高为5 020 mm×1 690 mm×1 935 mm;福田皮卡,长×宽×高为5 310 mm×1 860 mm×1 790 mm。
(2)假人
交通参与者模拟行人,安装在可移动小车上,如图6所示。

图6 交通参与者
3.1.3 数据采集设备
数据采集设备采用华测P3 北斗高精度定位测向接收机。通过惯导采集测试车辆的数据,包括测试车辆速度、测试车辆正前方与交通参与者之间的夹角、测试车辆与交通参与者的距离和交通参与者数据包括交通参与者速度等。
3.2 场景评价与分类试验
选取的10 组典型场景编号分别为5、6、7、13、22、29、30、33、34、42,分别计算每个场景的场景复杂度分值。下面以测试场景30 为例,计算该测试场景的复杂度。该测试场景的测试车辆在右侧车道左转,行人沿车道线同向行走,如图7所示。
3.2.1 测试现场
测试车辆位于测试车道,开启自动驾驶模式;测试终点设在离测试车辆前进方向十字路口左侧50 m 以上的位置,行人沿两车道分割线同向行走,实时记录测试车辆和行人的速度、相对距离和夹角等参数,测试现场如图8所示。

图7 测试场景30

图8 场景30测试现场
3.2.2 评价方法
(1)静态场景复杂度
统计场景30的静态环境要素库如图9所示。
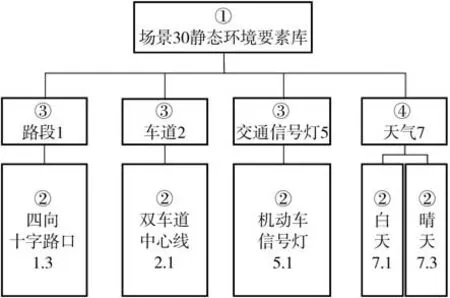
图9 场景30环境静态要素库
场景30的构成节点分组统计如表2所示。
计算交通环境复杂度系数:
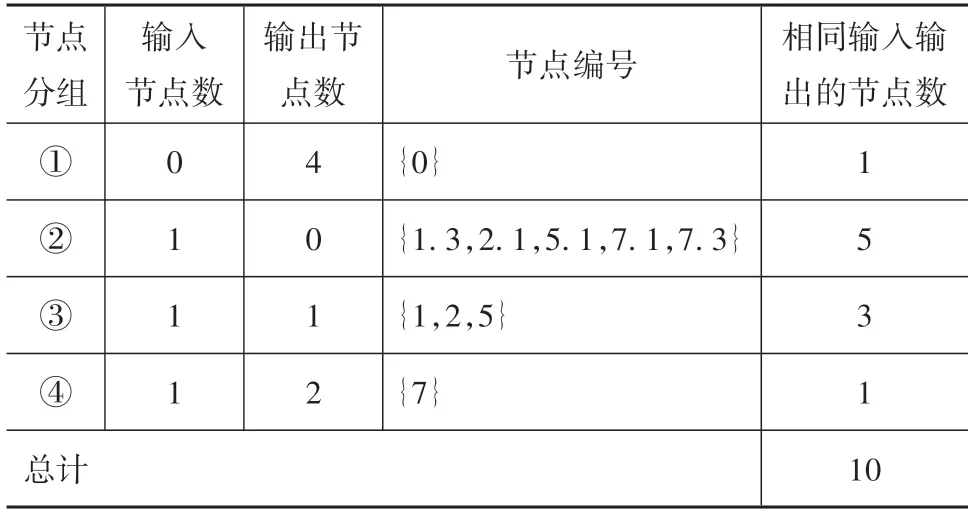
表2 场景30静态环境要素的节点分组统计

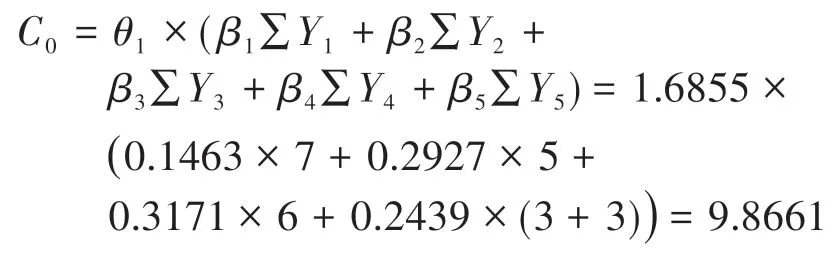
静态影响类别的权重分别为路段、车道、交通信号灯和天时,设置难易程度(0-10)分别为3、6、6.5、5[8-9]。通过判断矩阵,得到权重:路段β1=0.1463,车道β2=0.2927,交通信号灯β3=0.3171,天时β4=0.2439。
表3 为静态要素分值表,由专家打分确定各指标对应影响要素分值[8-9],路段Y1=7、车道Y2=5、交通信号灯Y3=6、天时Y4=3、Y5=3。
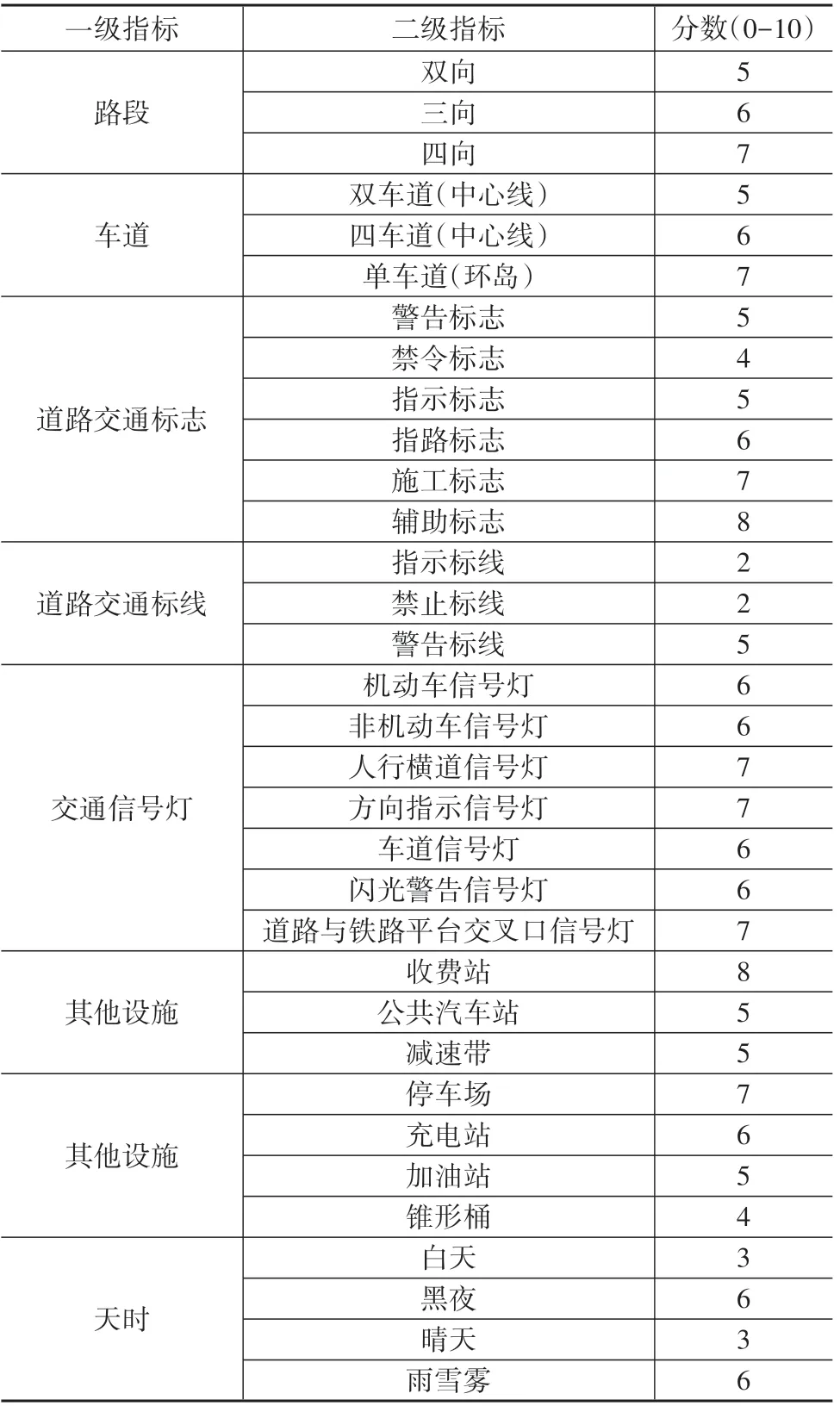
表3 静态要素分值
静态环境复杂度分数为
(2)动态场景复杂度
将试验测试数据代入式(3)~式(5),得到的动态场景复杂度分数为

(3)场景复杂度
自动驾驶车辆道路测试场景复杂度为

3.3 试验结果分析
对10 组典型场景的场景复杂度分别进行计算,统计每个场景的静态场景复杂度、动态场景复杂度和场景复杂度,10 组典型场景复杂度统计如表4所示。

表4 10组场景复杂度汇总
从表4 可知,利用本文中研究的场景复杂度模型可以计算出每个场景的复杂度值,其中静态场景复杂度主要由不同类型的静态场景要素权重和场景要素值决定,通过试验发现,采用信息熵理论可以计算出静态场景的复杂度值,可有效地比较不同场景的难易度,但是数值相差并不大,主要原因可能是现阶段还没考虑静态场景的差异性变化,比如双向车道的角度、高低和汇合等因素,未来研究可以增加这方面的考虑。而动态场景复杂度主要由测试车辆与交通参与者的速度、距离和相对夹角决定,通过试验发现,采用引力模型可以有效区分不同场景难易度,有利于简单、中等、复杂不同等级场景的划分。
进一步通过散点图观察不同场景的场景复杂度,横坐标取为场景编号,纵坐标取为场景复杂度,10 个场景的分布情况如图10 所示。按复杂度将场景分成3个等级,场景复杂度<100为简单场景,100≤场景复杂度≤500 为中等场景,场景复杂度>500为复杂场景,因此场景5、6、7、29、30 为简单场景,场景13、22、33、42为中等场景,场景34为复杂场景。

图10 场景分类图
4 试验结果验证
具体分析每组场景的复杂度值,观察是否与人类认知的场景复杂度相同,以验证场景复杂度模型的合理性。场景复杂度验证-1如图11所示。场景下面括弧中的数值表示复杂度值。场景5(侵入车辆识别)的复杂度>场景7(路口行人横穿道路)的复杂度>场景6(椎桶识别)的复杂度,与人类驾驶员经验相同。在实际驾驶过程中,驾驶员躲避静态的障碍物、规律运动的障碍物和非规律运动障碍物的难度也是逐渐增加的。

图11 场景复杂度验证-1
场景复杂度验证-2 如图12 所示。通过分析场景5、场景22 和场景42,场景42(弯道会车)的复杂度>场景22(T型路口直行时,左侧支路车辆左转)的复杂度>场景5(侵入车辆识别)的复杂度,与人类驾驶员经验相同,试验结果合理。
场景复杂度验证-3如图13所示。由图可见,场景34(路口右转弯,左侧支路车辆直行)的复杂度>场景29(路口左转弯,对向车辆直行)的复杂度,与人类驾驶经验相同,在实际驾驶过程中,十字路口右转比左转更易发生事故,试验结果合理。
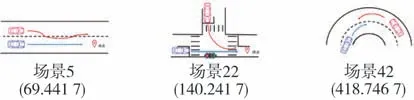
图12 场景复杂度验证-2

图13 场景复杂度验证-3
综上所述,通过实际道路测试,场景复杂度可以合理反映自动驾驶车辆在不同场景下测试的复杂程度和发生事故的风险大小,验证了复杂度模型的合理性。
5 结论与展望
基于场景复杂度模型提出一种自动驾驶车辆道路测试场景的分类方法,既可以实现对不同道路测试场景的分类,又能够划分出适用于不同自动驾驶车辆的场景复杂度,从而有助于自动驾驶车辆企业或第三方测评机构选取典型场景对自动驾驶能力进行测试验证,有助于提高自动驾驶车辆测试效率和测试结果的可信度,推进自动驾驶车辆的产业化。
深入研究了自动驾驶车辆在开放道路环境下的测试方法,并在国家智能网联交通(京冀)示范区进行了可行性验证。试验结果表明,基于场景的自动驾驶车辆道路测试方法能够对车辆的驾驶行为安全进行有效的测试与评价。本研究将推动北京市自动驾驶车辆道路测试管理规则的颁布,促进自动驾驶企业开展道路测试,有利于实现冬奥会投放自动驾驶车队的目标。
