自动驾驶汽车测试场景构建关键技术综述*
2021-05-12徐向阳胡文浩董红磊肖凌云李鹏辉
徐向阳,胡文浩,,董红磊,王 琰,肖凌云,李鹏辉
(1. 北京航空航天大学交通科学与工程学院,北京 100191;2. 国家市场监管总局缺陷产品管理中心,北京 100101;3. 中国汽车工程研究院股份有限公司,重庆 401122)
前言
“零事故”是自动驾驶汽车发展的安全目标,随着传感器探测精度、多传感器融合、深度学习等技术的快速发展,自动驾驶功能在实验室、封闭场地和可控开放道路上已经初步实现[1-2]。但在自动驾驶汽车正式投放市场之前,还需要进行一系列的安全测试和评价,以保证自动驾驶的安全性。反观自动驾驶的发展过程就是驾驶员驾驶操作逐渐退出的过程[3],原本由驾驶员完成的“感知-决策-执行”动作逐渐要由车辆替代完成,因此原有仅针对车辆动态操控、被动安全和零部件系统的测试评价体系无法满足自动驾驶汽车的测试需求。通过调研国内外自动驾驶汽车主要研究方向发现,自动驾驶汽车的研究重点已经从自动驾驶技术的突破与实现逐渐向自动驾驶功能的测试评价技术转移[4-5]。
现阶段主要的测试方法为实车道路测试,然而,根据美国交通部公布的数据[6],驾驶员需要行驶约80 万km 才会发生一起碰撞事故,平均需要驾驶车辆35年。美国兰德公司Kalra 等[7]研究认为,在95%置信度水平下,要证明自动驾驶汽车在事故致死率方面比人类驾驶员低20%,需要进行142 亿km 以上的道路测试。因此,许多学者认为,目前尚无已知的在经济上可行的测试评价方法,这也被称为“自动驾驶上路的批准陷阱”[4]。各国研究人员均在研究探索可行的自动驾驶汽车测试方法,美国密歇根大学彭辉教授提出,自动驾驶汽车99%的测试验证工作应在虚拟环境中完成,0.9%应在实际场地环境中完成,最后少部分在公共交通环境中完成。虚拟测试将是自动驾驶汽车测试验证的主要方式,而场景是虚拟测试的基础。
场景是从空间和时间维度描述人-车-路-环境之间复杂动态关系的模型,是自动驾驶汽车产品研发和功能测试的基础[8-10]。本文中基于大量国内外研究机构和学者发表的研究报告与文献资料,系统地梳理了场景定义与架构、场景主要信息源及采集方法、场景信息提取挖掘方法和场景构建与测试应用的研究现状,总结分析了现有研究的不足,并提出了研究展望。
1 场景定义与架构
通用性的定义和结构性的框架是场景研究的基础,然而,在场景研究的初期,并没有关于场景具体定义和架构的深入研究,相关机构和学者只是将车辆周边的环境信息概括为“场景”,并应用于自然驾驶和交通事故等分类和归纳研究中[11-14]。随着自动驾驶汽车测试验证对场景应用需求的增加,有学者从自动驾驶感知与功能测试的角度系统梳理了机器对行驶环境的认知需求,并基于此提出了场景的定义和架构。Ulbrich 等[15]提出场面(Scene)、情形(Situation)和场景(Scenario)的关联性,并认为场景是多个场面按照时序情形依次发生的过程,并会持续一段时间。欧盟PEGASUS项目[16-18]系统分析自动驾驶汽车不同研发阶段的测试需要,依据抽象程度和表达方式的不同,将场景分为功能场景、逻辑场景和具体场景3类,并结合测试需求将场景划分为道路层、交通设施层、临时调整的交通设施层、移动物体层、环境状态层和通信层6个层次。赵祥模等[19]认为自动驾驶测试场景指在一定时空范围内,自动驾驶汽车与行驶环境中的其他车辆、基础设施、天气、光照、障碍物等要素综合交互的过程,同时,将场景要素分为静态要素和动态要素两大类。朱冰等[20]在综述的基础上,提出了自动驾驶测试场景的内涵是自动驾驶汽车与其行驶环境各要素在一段时间内的总体动态描述,并将场景要素分为交通环境要素和测试车辆基础信息2大类,共覆盖7个具体要素信息。
在实际测试应用过程中,部分学者将被测车辆功能特征引入到测试场景。Geyer等[9]认为场景是自动驾驶测试要素,涵盖了环境元素、动态元素和驾驶指令,同时也包括了驾驶员的行为和自动驾驶的自主行为。美国国家公路交通安全管理局(NHTSA)[21]发布的报告中提出自动驾驶汽车测试场景的框架,具体包括车辆运动行为(DDT)、设计运行范围(ODD)、事件感知与决策行为(OEDR)和失效模式行为(FM),从车辆功能特征的角度对测试场景进行描述。
本文归纳上述研究认为,场景是描述主车自动驾驶功能特征与人-车-路-环境-信息之间的复杂时间、空间动态关系的模型,自动驾驶测试场景信息应包括场景要素和测试要素2 类,并由10 层信息组成(如图1 所示)。同时,应结合被测汽车技术路径及测试目的,对场景组成元素进行分级,若场景元素信息量能够达到基础要求,就可应用于测试。
2 场景信息提取与挖掘方法
面向自动驾驶测试,各国学者提出了多种基于已知数据源或经验知识的场景提取构建、挖掘、解构与重构方法,不同方法得到的场景在代表性和应用方向各不相同。本文在系统研究现有场景构建方法的基础上,结合自动驾驶测试需求,归纳了场景的构建方法体系,包括具体场景提取构建、人类驾驶典型逻辑场景挖掘分析、自动驾驶危险逻辑场景推理演绎和具体场景重构衍生(如图2 所示),下面对相关方法的关键技术和研究进展分别进行综述。
2.1 具体场景直接构建
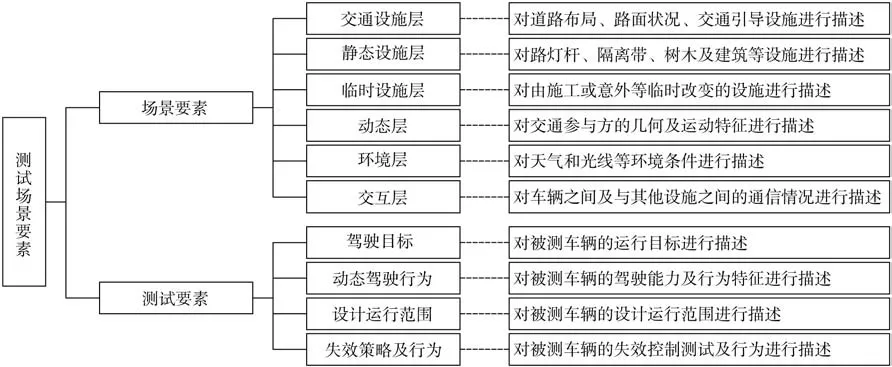
图1 自动驾驶测试场景要素及分层架构

图2 场景构建方法体系
具体场景直接构建是依据场景架构及要素组成,从基础数据源进行提取或者组合推理出具体场景。朱冰等[20]认为场景的来源包括真实数据、模拟数据和专家经验3 个部分的9 个信息源。舒红等[22]结合自动驾驶主要功能特点,提出了一种基于经验知识组合推理测试场景群的方法。由于地域代表性是评价自动驾驶适用范围最为直接的指标,而在现有场景来源中仅有规模化采集的自然驾驶数据和事故数据具备相对可信的统计分析意义及区域代表性,因此,本文中主要关注基于自然驾驶数据和事故数据的提取构建方法。
2.1.1 自然驾驶场景信息提取关键技术
由于自然驾驶数据采集由多个传感器配合完成,采集到的数据为多源异构数据,在应用于场景构建之前需要进行数据的融合处理。本文中总结自然驾驶场景信息提取流程,如图3 所示,具体包括:数据采集、目标物融合感知、自然驾驶片段提取和场景数据标注提取。
目标物融合感知是在时间、空间同步的基础上,汇总自然驾驶采集到的摄像头、雷达和车载CAN总线等信息,采用语义分割和深度学习等技术,系统识别行驶过程中的交通参与方、车道线和交通标识等动静态目标物,及其与主车在时间、空间中相对关系。
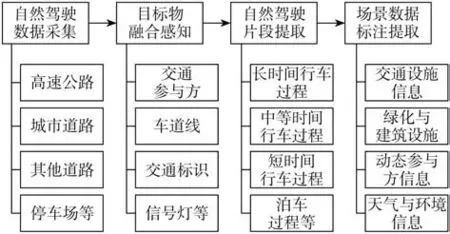
图3 自然驾驶数据预处理流程
自然驾驶片段提取是实现测试应用的关键,片段的划分需要综合考虑数据采集区域、数据类型和自动驾驶测试需求。同济大学陈名扬[23]研究认为,自然驾驶数据中过程是最基本组成单元,并分为长时间行车过程、中等时间行车过程、短时间行车过程和泊车过程。现阶段,针对自然驾驶片段提取,主要面向涉及危险事件的短时间过程,吴斌等[24]基于驾驶员制动和转向输入特性,建立了紧急制动和紧急转向的数据模型,并提出了自然驾驶数据的危险评估算法。Sun 等[25]基于自然驾驶数据综合考虑车辆速度、横向/纵向/垂向加速度和制动压力,提出了一种自动识别危险事件的评估方法。
场景数据标注提取是针对每个自然驾驶片段,综合视觉和雷达感知识别算法、信息融合技术[26-28]和人工操作,在目标物融合感知的基础上从行驶片段中标注并提取场景构建所需的交通设施信息、绿化与建筑设施、动态参与方信息和天气与环境信息等。
自然驾驶数据可根据实际研究的需要,架设传感设备来采集信息,信息的完整度及准确度较高,但是采集典型场景尤其是危险场景的效率较低,当数据积累到一定程度时将表现出明显的长尾效应。
2.1.2 事故预碰撞具体场景信息提取关键技术
对于自动驾驶汽车测试,事故信息中最为重要的是事故发生前5 s左右的信息,而这类信息从传统事故深度调查中无法直接获取,需要根据事故现场痕迹特征对事故发生的过程进行再现分析,然后从事故再现结果获取场景构建所需的信息。
传统道路交通事故的再现研究多基于运动学和动力学模型进行反向推算[29],但由于事故中包含大量的不确定因素,对再现结果的准确性有较大的影响[30-32]。近年来,随着城市基础设施建设的完善,道路监控视频覆盖面快速提升。根据NAIS 事故深度调查数据显示,在我国城市地区发生的交通事故,有道路监控视频或者行车记录仪记录的比例超过了50%。与此同时,事故数据记录装置(EDR)[33-36]、新能源汽车及自动驾驶汽车的行驶信息记录模块中也记录了大量车辆行驶信息[37],这些信息可有效提高事故再现的准确度。
VUFO 在预碰撞场景(pre⁃crash⁃matrix,PCM)研究中[38],依托已完成再现分析的GIDAS 数据构建了超过10 000例预碰撞具体场景。国家市场监督管理总局缺陷产品管理中心和西华大学基于NAIS 数据建设了预碰撞场景数据库,已经完成1 000例预碰撞具体场景的提取构建。
2.2 人类驾驶典型逻辑场景挖掘分析
按照2.1 节方法提取到的场景均为离散的场景数据集,可直接应用于自动驾驶功能测试,但无法满足测试对场景覆盖面的需求,需要进一步采用分类和聚类等多元统计方法,分析挖掘典型场景特征及主要参数阈值空间和概率分布模型,可形成具有代表性的人类驾驶典型逻辑场景。
NHTSA[39]基于NASS⁃GES 数据库分析提取了37类乘用车典型预碰撞功能场景。Najm 等[40]基于NASS⁃GES事故数据库提取了涉及追尾、换道和驶出路面的典型预碰撞功能场景,并设计出针对自动驾驶前碰撞预警和车道偏离预警功能的具体测试场景。德国联邦交通研究所(BASt)等15 家单位[41]共同发起的ASSESS 项目,依据GIDAS 事故数据,针对自动驾驶紧急制动和前碰撞预警功能分析提取出4类典型逻辑场景和20 种测试场景,并已应用于AEB的测试评价。
考虑到场景数据的离散性和形态的复杂性,有学者采用聚类分析算法挖掘典型场景。Philippe等[42]针对1 056例发生在路口的交通事故案例,采用k⁃medoids 聚类分析算法挖掘出15 类典型丁字路口危险场景和6 类十字路口逻辑场景。Lenard 等[43]针对9 360 例汽车与行人碰撞事故,应用系统聚类分析,挖掘出能够代表86%事故案例的6 类典型逻辑场景。苏江平等[44]和刘颖等[45]分别基于自然驾驶数据,利用系统聚类方法得到4类和5类具有不同代表性的典型行人交通冲突逻辑场景。胡林等[46]、Cao等[47]和Sui 等[48]分别依托419 例、672 例和535 例汽车与两轮车碰撞事故案例,采用聚类分析算法提取了11 类、6 类和4 类典型逻辑场景。相关逻辑场景已经不同程度应用于自动驾驶功能的测试与评价中。
采用多元统计分析方法可有效提取典型逻辑场景,然而基于现有数据源挖掘到的场景均无法有效体现自动驾驶特有的危险特征。
2.3 自动驾驶危险逻辑场景推理演绎
自动驾驶汽车特有的通行行为必然会带来新的危险场景,基于已有自动驾驶测试数据、专家分析经验以及自动驾驶事故调查数据,结合自动驾驶技术路线,分析自动驾驶行为特征并提取风险因子,并以人类驾驶典型逻辑场景为基础,可实现特定自动驾驶功能下的危险逻辑场景的推理演绎。现阶段,关于场景推理演绎及风险因子的文献资源有限,国际标准化组织(ISO)发布的ISO/PAS 21448:2019《Road Vehicles⁃Safety of the Intended Functionality(道路车辆预期功能安全)》[49]从触发事件角度分析了车辆算法、传感器和执行器的风险因子。本文中系统梳理了自动驾驶部件组成及功能特性,从自动驾驶感知、决策、执行和通信4 个功能维度提出了风险因子分析的重点关注因素(如图4所示)。
2.3.1 从“感知”角度分析
自动驾驶汽车感知是采用车载感知元件,探测并识别自动驾驶决策所需的必要信息。在场景推理演绎时应重点关注传感器感知极限以及外部信息的干扰等因素。

图4 自动驾驶风险因子关注因素
自动驾驶汽车常用的车载感知元件有摄像头、毫米波雷达和激光雷达等,各感知元件均有着相应的优缺点[50-51]。摄像头对目标物的识别和分类具有先天优势,尤其在平面目标特征识别方面,是其他感知元件无法取代的,但在恶劣天气条件下其识别效果会受到严重的影响[52-54]。毫米波雷达采用毫米波波段探测外界目标,由于其波长相对较长,探测稳定度相对较高,但对非金属物体和静态物体的识别不敏感,同时,多辆车之间的雷达波也存在相互干扰的可能。激光雷达探测精度远高于其他感知元件,在障碍物检测方面具有较大的优势,但在恶劣天气条件下的探测范围和探测精度也容易受到影响[55]。由于单一感知元件有明显的优缺点,采用多传感器融合技术可实现传感器优势性能聚合,但由于识别算法的复杂性,不可避免地会有一定的局限性[56]。
2.3.2 从“决策”角度分析
自动驾驶汽车决策是基于感知获取的场景信息,对目标物的运动状态进行识别和预测,并规划出合理的驾驶动作和行驶路径。在场景推理演绎时应重点关注参与方之间的复杂运动交互。
自动驾驶汽车将长期与人类共用交通资源,人类驾驶汽车的行为不确定性,如违反交通规则通行、紧急变道和切入行为,将给自动驾驶汽车的决策带来挑战;行人和二轮车由于运动惯性较低,运动轨迹及行为的突变也将提高自动驾驶汽车目标跟踪与预测算法的复杂程度[57]。
2.3.3 从“执行”角度分析
自动驾驶汽车执行是依据决策指令,控制车辆完成规定的驾驶动作和行驶路径,在场景推理演绎时应重点关注道路条件干扰及车辆的动力学极限。
自动驾驶汽车在行驶过程中,复杂的道路条件如道路坡度、路面破损和附着条件等,会对车辆横、纵向避让措施和安全车速等涉及车辆动力学极限的参数决策产生较大影响[58-59],将给自动驾驶汽车的执行策略带来直接挑战。
2.3.4 从“通信”角度分析
自动驾驶汽车V2X 通信是特殊的感知功能,依托具体V2X 通信功能可获取道路交通标识、参与方位置和运动等场景信息,有效扩展车载传感器的感知范围。涉及V2X 通信功能的测试场景在推理演绎时应重点关注通信时延、信息丢失和错误等问题。
V2X通信高度依赖道路基础设施和通信数据格式与协议标准的统一,常见的V2X 通信技术包括移动通信网络(LTE)、Wi⁃Fi、专用短程通信(DSRC)和ZigBee 等,不同技术手段在通信距离、速度、时延和抗干扰方面性能差异较大,由此可能带来的通信延时、信息丢失及错误等问题,会直接影响通信的可靠性,并对自动驾驶决策算法带来挑战[60-64]。
2.4 具体场景重构衍生
经多元统计挖掘和推理演绎获取的人类驾驶和自动驾驶逻辑场景无法直接应用于测试,需要进一步生成具体场景,而重构衍生是批量生成具体场景,提高测试效率的关键手段。以逻辑场景主要参数及其概率分布模型为基础,采用随机采样、重要性采样和机器学习等算法模型提取参数值,可实现具体场景的重构衍生。
现阶段,关于重构衍生算法的研究,主要集中在算法模型的设计。Schuldt 等[65]在连续随机采样的基础上,分析系统安全的影响因素,将连续参数离散化,采用组合算法生成组合测试集的方法生成测试场景。Fellner 等[66]基于快速搜索随机树的算法框架,在给定的状态变量初始值为定值的前提下,通过寻找模型的变异值确定变量取值,实现测试场景的生成。
Xia 等[67]建立了一种涵盖场景复杂度指标的测试用例随机组合生成算法。其中场景复杂度主要算法思路为:分析影响场景复杂度的组成要素,确定各要素值及其对应的复杂度指标,通过不同组成要素的随机组合实现测试用例的采样,其中采样得到的每一个测试用例u可以通过元组表示为:u=(wG;p1,wG;p2,...,wG;pLG-1),wG;pj代表该测试用例中特定场景要素与其他要素之间的相对重要性指标向量,该测试用例的复杂度
密歇根州立大学Zhao 和Huang 等的研究团队[68-73]基于自然驾驶数据对测试场景中目标车辆的运动数据进行分布拟合,并通过重要性抽样算法将拟合的模型f(u)采样值向危险参数范围进行偏移得到一个全新的概率分布模型f͂(u*),以改变目标车的运动状态。原始模型的概率密度函数表示如下:
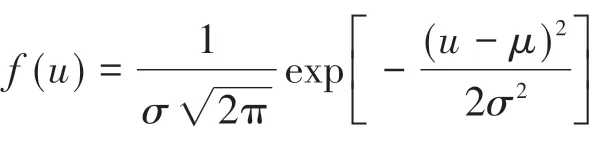
式中:u为目标车运动模型的随机采样参数;μ为概率密度均值。
将测试结果的事故率最高作为求解偏移值的优化目标,然后利用二次规数函数或交叉熵算法求得对应的偏移值,最后基于偏移值重新构造目标车的随机运动模型。

基于新模型采样生成碰撞可能性更高的目标车运动轨迹,可实现测试加速7 000倍。
经重构衍生得到的具体场景具有足够的样本量,可有效覆盖逻辑场景,同时,结合自动驾驶功能和测试需求的不同,可设计针对性的重构衍生算法,在虚拟仿真平台中可有效实现自动驾驶的全面测试和加速测试。
3 虚拟测试应用
经提取和挖掘的场景信息可直接应用于虚拟场景的构建及测试,目前广泛使用的虚拟场景构建及仿真软件包括VTD、PreScan、CarMaker、PanoSim 和51VR等[74],软件均提供了模块交互式的场景设计界面,使用者可拖动车道线、路面、车辆、交通标志等模块,设置交通参与方行驶轨迹和速度等信息,形成虚拟场景文件。与此同时,相关软件也支持Open⁃drive格式下高精度地图的自动导入,可快速生成虚拟道路环境。然而,模块交互式的场景设计方案易于使用者快速掌握使用技巧,但场景搭建效率较低。为此,部分机构基于通用场景格式,开展了虚拟场景自动化构建方法研究。中国汽车工程研究院股份有限公司面向Open⁃X 场景格式开发了场景数据处理平台(i⁃SDAT)及工具链,可实现虚拟场景的自动化构建,极大提高了场景构建的效率。
虚拟场景应用于自动驾驶测试的方式较多,一般可归纳为片段式场景测试、多片段拼接式场景连续测试和融合交通流的场景测试3种方法。
(1)基于场景片段的测试应用
在实际虚拟测试过程中,面向自动驾驶功能及测试需求,首先需要确定场景测试用例集,每一个测试用例均为一个单独的片段,测试时,需依次完成所有场景片段的测试。该测试方法具有测试流程清晰、覆盖度高、适应性高、测试初始状态可调等特点,是现阶段虚拟仿真测试的主流方式。
(2)多场景片段拼接的测试应用
为实现L3 及以上等级自动驾驶汽车的连续场景测试,部分机构提出了一种基于多场景片段拼接的测试方法,在虚拟环境下,将多个场景采用触发的方式进行有机排布,通过设定自动驾驶汽车行驶路线,实现被测场景的顺次触发,达到连续测试的目的[75]。
(3)融合交通流的测试应用
为了强化测试场景的真实性和复杂性,有机构提出了融合交通流的测试方法,基于真实交通大数据,训练交通流模型并融入场景片段,生成真实度高、交互性的场景,可实现趋近于真实道路连续驾驶状态下的自动驾驶虚拟仿真测试[76]。
4 研究展望
在自动驾驶汽车测试场景构建方面,各国学者均开展了大量的研究,并已经在辅助驾驶功能的测试方面发挥了重要的作用,但尚未形成从数据分析挖掘到场景构建应用的完整方法链和工具链。在总结梳理现有场景构建研究的基础上,提出如下研究展望。
(1)基于大数据挖掘方法扩充场景信息源
危险场景是自动驾驶汽车测试的关键,但是现有基于自然驾驶数据和事故深度调查数据的危险场景提取方法在场景构建效率和数量方面无法满足测试的需求。应当探索引入大数据挖掘算法,在已构建场景的基础上,融合道路监控视频、交管部门事故信息和车辆测试及运行信息等大数据资源,提取交通参与方的运动特征和其他场景信息,高效挖掘危险场景。
(2)拓展挖掘自动驾驶风险因子
随着自动驾驶技术的迭代发展,其交通渗透率也将不断提升,由此必然会带来新的道路交通特征及安全形势。因此,应当在充分考虑自动驾驶技术路线的基础上,模拟研究不同自动驾驶功能及渗透率下的交通变化趋势,分析新的道路安全形势和可能带来的风险因子,并在场景构建中予以考虑。
(3)对接自动驾驶测试的场景构建标准体系建设
场景构建标准体系是实现场景对比分析和代表性分析以及国际间场景互认的基础,是提升自动驾驶在不同国家地域间场景适应能力的关键,国际标准化组织ISO/TC22/SC33 已经在推进场景构建及测试部分标准的建设[77]。面向自动驾驶测试,标准体系应当涵盖场景定义与架构、提取挖掘、推理演绎、重构衍生、虚拟场景表达与构建的方法链和工具链等方面。
5 结论
减少道路交通事故和降低人员伤亡程度是自动驾驶汽车发展的重要目标,自主识别复杂多样的危险场景并采取合理的处置方式是衡量自动驾驶汽车安全水平的重要体现。目前普遍采用的实车道路测试方法存在时间成本大、效率低且危险场景覆盖面不足的问题,基于危险场景的虚拟测试技术是解决这一问题的重要途径。本文从自动驾驶汽车测试场景定义与框架、主要信息源及采集方法、场景信息提取与挖掘方法和虚拟场景构建与测试应用方法4 个方面系统梳理了相关研究工作,归纳提出了涵盖具体场景提取构建、人类驾驶典型逻辑场景挖掘分析、自动驾驶危险逻辑场景推理演绎和具体场景重构衍生的场景构建方法体系,并分别综述相关研究进展。完整的场景构建方法链、工具链和标准体系,是实现场景高效应用于自动驾驶虚拟测试并提升自动驾驶汽车地域适应性的关键。在现有场景构建方法的基础上,应当引入大数据挖掘方法扩充数据源提高场景代表性,拓展挖掘自动驾驶风险因子高效推演自动驾驶危险场景,构建国际标准体系实现场景互认,助力自动驾驶汽车安全水平提升及产业落地。
