基于最小模型误差估计的智能汽车路径跟踪控制*
2021-05-12梁艺潇
任 玥,冀 杰,赵 颖,梁艺潇,郑 玲
(1. 西南大学工程技术学院,重庆 400715;2. 重庆大学汽车工程学院,重庆 400044)
前言
随着传感器技术、芯片算力和人工智能技术的快速发展,以智能化、电动化、网联化、共享化为代表的“新四化”成为了汽车工业前沿技术的发展趋势。由于能够极大地减轻驾驶员负荷,改善交通效率,减少道路交通事故[1],在“新四化”中,智能化技术尤其受到重视和资本的青睐,近5 年来得到了显著的发展。而作为自动驾驶的“四肢”,智能汽车路径跟踪控制是整个自动驾驶功能实现的基石,也是车辆智能化进程中从驾驶辅助阶段迈向高度自动驾驶阶段的关键问题。
近年来,全球范围内的学者针对车辆路径跟踪控制进行了广泛的研究。以模型不同来区分,车辆路径跟踪控制可分为基于几何学模型、运动学模型和动力学模型[2]。几何学模型较为简单,仅考虑车辆与参考路径相对位姿和阿克曼转向关系。最经典的几何学路径跟踪控制算法包括pure pursuit算法和Stanley算法。2005年斯坦福大学无人驾驶赛车采用Stanley算法取得了DARPA挑战赛的冠军[3]。
相比于几何学模型,运动学模型考虑了车辆纵横运动耦合关系。Rajamani 等[4]研究了前轮转向车辆倒车场景下的路径跟踪问题,在非线性运动学模型基础上,基于输入状态反馈线性化控制器,引入了基于预瞄的输入输出反馈线性化控制器,提高了控制精度。Raffo等[5]基于离散线性化后的时变运动学模型,提出了广义模型预测控制路径跟踪控制方法,在低速工况效果较好。基于运动学模型的路径跟踪控制方法简单实用。在中低速和小曲率工况下能够取得较好的控制效果,但在高速大曲率工况下,由于车辆动力学耦合加剧,侧滑发生,加之轮胎非线性特性凸显,控制效果较差。
为更精确地描述车辆在不同工况下的动力学特性,提高路径跟踪精度,车辆动力学模型被广泛应用。考虑不同的控制性能需求,基于车辆平面动力学模型,多种控制方法被运用到车辆路径跟踪控制器设计中,包括模型预测控制(MPC)[6-7]、复合非线性反馈控制(CNF)[8]、基于线性不等式的鲁棒控制(LMI)[9]和滑模控制(SMC)[10-11]等等,均获得了较好的跟踪效果。
无论采用何种模型,准确的状态参数获取都是取得较好控制精度的前提。上述研究大多假设车辆全状态参数均可直接获取,而实际中某些系统关键参数(如车辆侧向速度、质心侧偏角等)往往难以直接精确测量。而对于该类参数,大多数学者采用EKF 和UKF[12-13]等模型观测方法进行估计。但是上述观测方法估计效果也与模型精度直接相关,而为保证计算效率,一般采用简化车辆模型进行观测,其在一定程度上会影响参数估计效果。
为减小模型导致的估计误差,提高路径跟踪效果,本文中基于分布式驱动智能电动汽车,设计了基于最小模型误差观测的一体化路径跟踪控制器,其控制构架如图1所示。
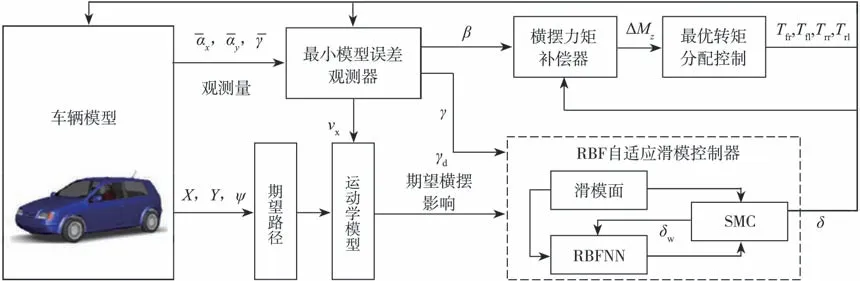
图1 智能汽车路径跟踪控制框架
整体控制架构主要包括3 部分。首先基于最小模型误差准则,设计了车辆纵、侧向速度和横摆角速度观测器。在此基础上,根据期望路径的期望横摆响应,考虑转向系统的潜在失效风险导致的不确定性,设计了基于径向基神经网络逼近的自适应滑模转向控制器。最后,基于分布式驱动电动汽车驱动/制动转矩独立可控的优势,设计了稳定性集成控制器和转矩分配策略,进一步提高了车辆路径跟踪过程的稳定性和机动性。
1 基于最小模型误差准则的车辆状态观测
1.1 车辆模型
对于路径跟踪问题,忽略车辆垂向运动对纵横运动的耦合作用,采用包含纵向运动、侧向运动和横摆运动的3 自由度单轨车辆动力学模型,如图2所示。
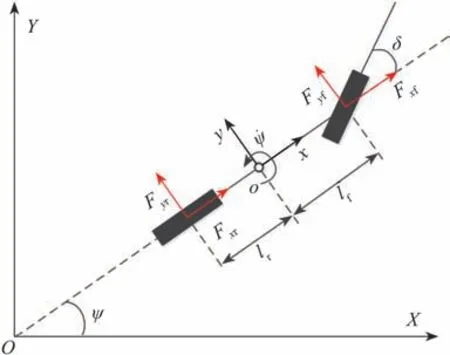
图2 3自由度单轨车辆动力学模型
在前轮转角比较小的情况下,基于小角度假设,车辆动力学模型可表示为

式中:m和Iz为整车质量和转动惯量;vx、vy和γ分别为车辆纵向速度、横向速度和横摆角速度;lf和lr为质心至前、后轴距离;B为车辆轮距;Fxf和Fxr为前、后轴纵向力;Fyf和Fyr为前、后轴侧向力。
1.2 状态观测方程
得益于分布式驱动电动汽车线控底盘,在车辆运行时,其转向盘转角和四轮的驱动/制动力矩都能够通过电机精确测得。车辆的纵、横向加速度和横摆角速度能够通过IMU 获取。而车辆的纵、横向速度难以直接精确测量,故建立一个5输入、3输出和3状态的观测系统,分别表示为

式中:Tfl、Tfr、Trl、Trr和δ分别为四轮驱动/制动转矩和前轮转角;aˉx、aˉy和γˉ分别为纵向加速度、横向加速度和横摆力矩的观测值。
在车辆动态运动过程中,由于车辆动力学模型受纵、横运动耦合影响,轮胎的纵、侧向力存在着严重的非线性特性,且难以用公式准确描述,故在此将轮胎纵、侧向力表示为

式中:ΔF和ω分别为轮胎力的不确定项和观测噪声;Fˉ为轮胎纵、侧向力的标称值,可用式(4)线性模型表示。
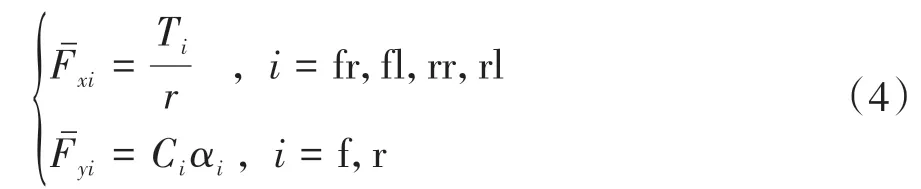
式中:r为车轮半径;Ci和αi分别为前、后轴名义侧偏刚度和侧偏角。考虑轮胎力的不确定性,联立式(1)~式(4),状态观测系统状态方程可表示为

其中f(x(t),u(t))=[f1,f2,f3]T,并有
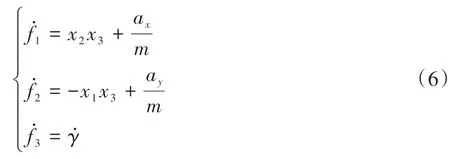
其中ax、ay和̇通过式(1)和式(3)计算得出。
式(5)中Es(t)代表状态误差,其由轮胎力不确定性和过程噪声两部分组成,表示为

其中:

过程噪声ω(t)可用满足协方差矩阵为Q的高斯分白噪声表示。
同理,系统输出方程可表示为

采用前向欧拉差分法,连续系统可离散为

式中ΔT为采样时间。在每一步的状态转移过程中,认为轮胎力不确定项不变,故在k-1时刻到k时刻的轮胎力不确定项均为d(k)。
1.3 基于最小模型误差补偿器的扩展卡尔曼滤波
由式(3)可知,轮胎力模型为不确定模型,其导致在式(9)离散状态观测方程中存在不确定项d(k),会对观测精度造成影响,通过设计模型误差补偿器能够提高模型精度,再通过扩展卡尔曼滤波算法消除随机过程误差和测量误差,能够取得较好的估计精度。
为最小化轮胎力不确定性对系统观测的影响,定义最小模型误差补偿器目标函数[14]为



对于二次型目标函数J[d(k)],根据最小值原理,其极值在处取得,故使得误差补偿目标函数最小的模型不确定值d(k)可通过下式计算[15]:

其中:

需要注意的是,式(14)中的协方差权重矩阵Γ需要满足:

式中Z为逼近R的时间指数。在实际调试过程中,由于随机高斯白噪声的存在,最优的协方差矩阵Γ随着系统状态而时变,难以精确求得。但由于在系统转移过程中,轮胎力不确定性的作用远远大于过程噪声,故一般取较大的Γ值能够获取较好的状态观测精度和鲁棒性。
通过式(14)的迭代计算,能够估计轮胎模型不确定度,并代入状态更新方程,从而降低因模型误差引起的估计偏差,为进一步地提高模型估计精度,采用扩展卡尔曼滤波算法消除过程误差ω和观测误差ν。具体迭代过程可表示为

式中A(k)和C(k)分别表示系统雅克比矩阵,具体可描述为
具体EKF迭代更新流程如图3所示。
其中误差协方差矩阵的初值P(0)通过系统初始输入和初始状态计算[15]。通过迭代更新计算,可实时估计出车辆横摆角速度、纵向车速和侧向车速,并计算求得车辆质心侧偏角。

图3 扩展卡尔曼滤波算法迭代流程
2 路径跟踪控制器
2.1 运动学预瞄模型
路径跟踪预瞄模型如图4 所示,其运动学模型可表示为

式中:eyp、Δψ分别为侧向位移偏差和航向角偏差;ρ(s)为参考路径曲率;Xp为预瞄距离,在低速时应适当小一些保证跟踪精度,高速时适当大一些,防止控制抖振引起的车辆失稳,其应随车速自适应变化。

式中:kd为预瞄车速增益;ldc为静态预瞄距离。

图4 预瞄跟踪模型
通过预先的路径规划可获得路径点坐标、曲率序列,结合车辆自身GPS 坐标信息获取预瞄点位置信息,即可计算距离预瞄点最近的坐标点位置信息。取预瞄点与参考点的侧向误差和航向角误差为状态变量xe=[eyp,Δψ],输入为期望横摆角速度ue=γd,输出为ye=xe。将式(18)写作线性状态空间方程形式:

式中:AL和BL为线性化状态转移矩阵,其计算方法同式(17);CL= diag(1,1)为输出矩阵。
最优期望横摆角速度可基于模型预测控制算法(MPC),通过求解预测时域最小目标函数取得,如式(21)所示。

式中:ymin和ymax为系统输出约束最大和最小值;umin和umax为系统输入约束最大和最小值。
2.2 基于期望横摆响应的自适应滑模控制策略
由此,路径跟踪问题被转化为了横摆角速度跟踪问题,定义滑模面为横摆角速度跟踪误差s=γ-γd,则有

其中:
式中:δ为最终车辆实际前轮转角;δw为车辆线控转向电机控制器实际输入转角;Kw为转向系统齿轮比。由于转向系统存在幅值约束,且由于线控转向系统可能会存在一定的性能衰退、失效等非线性特性,故转向电机输入转角和车辆实际前轮转角不呈线性关系,其不确定性用Δδ表示。Δδ未知,且存在时变可能。由于径向基神经网络具有复杂函数逼近功能,且具有在线自适应调节能力,故在此采用径向基神经网络对系统不确定性Δδ进行逼近,并设计自适应滑模控制器,如图5所示。
神经网络输入为滑模控制器实际输出的转向电机转角指令δw,输出为系统不确定性Δδ。输入输出关系为

图5 基于RBFNN补偿的自适应滑模控制器

式中:j表示第j个网络隐含层,本文中取j=5;W为网络理想权值;ε为网络逼近误差;̂和Δδ̂分别代表神经网络估计权值和估计输出。

基于式(22),设计控制率为

式中η≥bKwεmax。将式(25)代入式(22)可得

定义Lyapunov函数为

式中τ为正数。则有
取神经网络估计权值自适应率为

则̇= -η|s|+sbKwε≤0。
3 仿真与结果分析
为验证本文提出的状态观测算法与路径跟踪控制器的有效性,本节通过Carsim/Matlab 联合仿真平台进行仿真测试,测试车辆主要参数如表1所示。
表1 车辆主要参数
3.1 观测器性能测试
此部分主要对第1 节中基于最小模型误差的状态观测器性能进行验证,仿真结果如图6所示。
选取速度80 km/h 的单移线工况,路径曲率由图6(a)所示。从图6(b)和图6(c)中侧向速度和横摆角速度的估计结果可以看出,由于前文观测方程中轮胎力输入采用的是线性近似模型,与实际轮胎动力学特性存在误差,故在进行状态更新迭代时会产生相应误差,但最小模型误差补偿器通过在模型迭代过程中自适应补偿,能够有效地减小模型误差的影响,故最终估计结果较为可靠,侧向速度和横摆角速度最大估计误差分别为8.3%和5.1%,为控制器的设计提供了保障。
3.2 路径跟踪控制器性能测试
为验证本文所提出的自适应滑模路径跟踪控制器性能,选取路面附着系数为0.7、车速为100 km/h时的双移线工况,以模拟车辆高速换道避撞情况。仿真过程中假设车辆转向电机因通信数据丢包等情况[17]造成30%失效。为更好地突出本文所提出的控制策略的有效性,采用常规滑模控制与本文算法进行比较,仿真结果如图7所示。
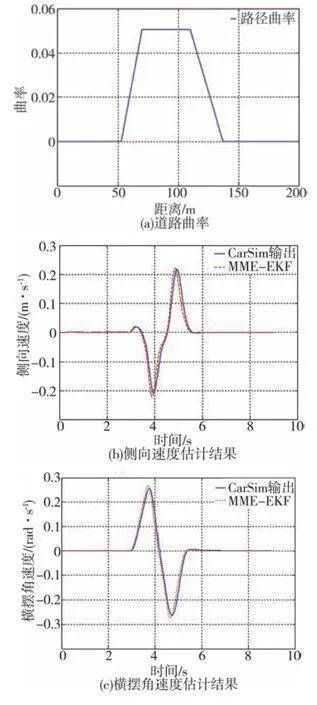
图6 状态观测仿真结果
从图7(a)可以看出,由于转向系统存在部分失效,实际输出转角小于控制器输出需求,故常规滑模控制器在车辆换到邻道和切回主道时由于系统输入响应不足,发生了相对较大的偏移,而自适应滑模控制器通过RBF 网络辨识系统的失效情况,并给予控制器一定的补偿量,所以自适应滑模控制策略在跟踪过程中路径更平滑,距参考路径的偏移量也较小。从图7(b)和图7(c)中可以看出,常规滑模控制在该工况下的最大侧向位移偏移与航向角偏移分别达到了0.31 m 和0.038 rad,而自适应滑模控制器的最大侧向位移偏移与航向角偏移仅为0.18 m 与0.36 rad。图7(d)中也能反映出常规SMC 由于系统失效导致实际转向盘输入转角较小,而自适应SMC能够通过神经网络补偿器保证足够的控制响应。综上所述,本文提出的控制策略具有更高的路径跟踪精度,尤其是在控制系统出现不确定性或性能衰退时,具有更好的鲁棒性。
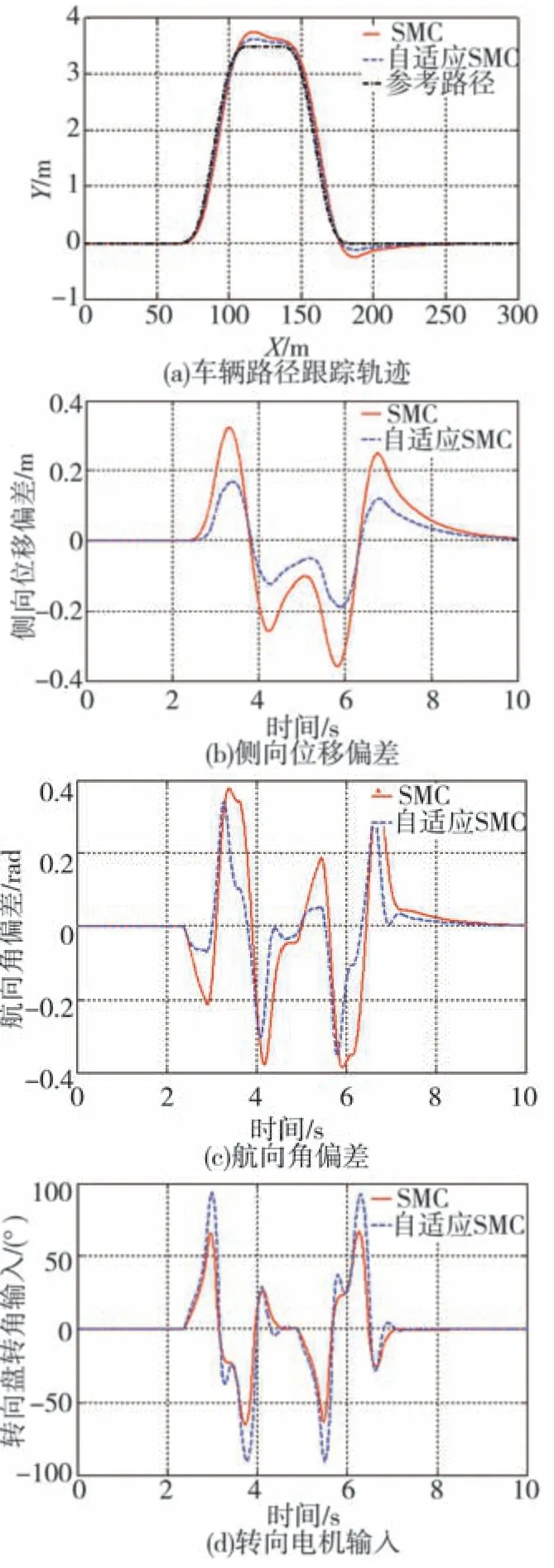
图7 双移线仿真测试结果
4 结论
本文中针对分布式驱动电动智能汽车的自主循迹问题,设计了基于观测器的路径跟踪控制构架,首先考虑到车辆关键状态参数纵、侧向车速难以直接精确测量,设计了基于最小模型误差准则的状态观测器,减小了由于非线性轮胎模型误差对估计精度的影响,取得了较可靠的参数估计结果。然后针对转向控制,提出了基于期望横摆响应的自适应滑模控制策略,并采用径向基神经网络对转向系统的不确定性进行逼近,基于李雅普诺夫函数证明了控制系统的鲁棒性。最后,采用直接横摆力矩控制器和最优转矩分配策略,进一步提高了车辆在路径跟踪过程中的稳定性。
通过CarSim/Matlab 联合仿真测试对本文所提出的控制策略进行了仿真验证,结果表明:基于最小模型误差准则的状态观测器,在估计模型存在误差的情况下,能够有效地提高估计精度。自适应路径跟踪控制器能够基于估计结果,在模型存在一定不确定性的情况下保证较好的跟踪精度和鲁棒性。
本文中仅考虑了匀速状态的路径跟踪工况,下一步工作将结合车辆局部路径规划决策,将纵向控制器结合到路径跟踪控制器中,实现车辆在不同车速、不同附着情况下稳定、精准的路径跟踪。
