考虑驾驶人特性的智能驾驶路径跟踪算法*
2021-05-12金立生谢宪毅郭柏苍
金立生,谢宪毅,司 法,郭柏苍,石 健
(1. 燕山大学车辆与能源学院,秦皇岛 066004;2. 吉林大学交通学院,长春 130022;3. 北京理工大学机械与车辆学院,北京 100081)
前言
汽车智能化已经成为汽车产业发展重要的潮流和趋势[1]。目前,路径跟踪作为智能汽车领域中一种较为常见的智能驾驶方案,旨在最大程度降低路径跟踪过程中车辆行驶轨迹与理想路径之间的误差和速度误差,已经成为汽车智能化的研究热点。
目前,路径跟踪控制方法可分为3大类。第1类是单点预瞄理论[2-5],最具有代表性的是郭孔辉提出的最优曲率驾驶人模型[2]。第2 类是基于神经网络的方法。张炳力等[6]以传统动力学模型和预瞄模型为基础,利用神经网络预测车速,将预测结果和侧向偏差等参数作为模糊神经网络的输入量,转向盘转角为输出量。第3 类是基于现代控制理论的方法[7-11]。葛平淑等[12]根据横向偏差和角度偏差设计了车体的偏航角速度模糊控制器。Hu 等[13]提出一种融合车道线检测与模型预测控制的路径跟踪控制器,根据横摆角和横摆角速度信息,借助于模糊规则对前轮转向角进行校正。Ji等[14]将车辆路径跟踪任务转化为多约束模型预测控制问题,通过调整前轮转向角度,实现在存在移动障碍物情况下的路径跟踪,该路径跟踪控制器具有良好的动态跟踪性能和良好的机动性。张家旭等[15]将车辆轨迹跟踪问题解耦为路径跟踪控制问题和速度跟踪控制问题,并基于快速终端滑模设计了路径跟踪控制律,基于“比例+积分”平滑切换准则设计了车速跟踪控制律。
在现有的路径跟踪控制研究中,大多数关注于路径跟踪控制性能问题,而忽略了智能汽车内驾驶人和乘车人的感受。实际上,不同驾驶人具有不同的驾驶习惯,即体现在所驾驶的车辆在响应特性上有所不同的状态。因此,对于智能汽车路径跟踪过程中车辆的响应特性需求和乘坐感受也有不同的要求。通过分析不同驾驶人的驾驶数据,可将驾驶人特性或驾驶人类型进行辨识、分类。
在驾驶人特性辨识研究中,李克强等[16]提出了一种结合隐马尔可夫模型和贝叶斯滤波技术的驾驶人特性识别算法。Tatsuya 等[17]采用k均值聚类算法将驾驶人分类,并根据驾驶人特性分类结果设计了车辆的自适应巡航系统。刘玺等[18]采用BP 神经网络分类器对驾驶风格进行辨识,提出了基于贝叶斯融合决策方法的驾驶人特性识别方法,进而设计了一种适用于不同风格驾驶人的双离合器换挡控制策略。
综上所述,一方面现有的关于驾驶人特性识别研究已有一定的理论方法,另一方面,将不同风格的驾驶人特性融入至智能驾驶的控制策略中,有助于提升智能驾驶系统的操控性能和来自不同风格驾驶人的认可度。对于路径跟踪控制研究来讲,开展考虑驾驶人特性的路径跟踪控制研究是提升智能驾驶路径跟踪的智能化程度和被不同特性驾驶人所接受、认可而亟待解决的问题之一。与此同时,也是提升智能驾驶系统满足不同特性驾驶人对智能汽车响应特性需求的关键所在。因此,考虑驾驶人特性的智能驾驶路径跟踪控制具有一定的研究意义和实际应用价值。
本文中拟通过实车试验采集相关数据,将具有不同驾驶习惯的驾驶人进行分类,划分为不同特性的驾驶人类型,通过考虑不同驾驶人特性以针对性设计路径跟踪算法,将不同特性驾驶人对车辆侧向、纵向行驶状态的不同偏好作为智能驾驶路径跟踪控制策略的设计依据,根据驾驶人特性和试验数据聚类结果设定路径跟踪控制器的约束条件和代价函数,为智能驾驶路径跟踪策略的设计提供了一种新的思路。
1 驾驶人特性数据采集与分析
1.1 试验方案设计
1.1.1 试验场地
在吉林大学南岭校区内选取某场地进行试验,驾驶人按日常的驾驶状态驾驶车辆,道路行驶环境包括直线行驶、左转、右转、掉头和绕环岛行驶等。
1.1.2 受试群体
为充分体现驾驶人的特性,在学校内招募了40名执有C1驾驶证并能够熟练驾驶机动车的驾驶人,职业为在校学生和上班族,受教育程度较高,其中男性25名(占比为62.5%),女性15名(占比为37.5%)。受试者年龄分布在22-40岁,平均驾龄为6年。
1.1.3 试验设备
试验车辆为大众牌迈腾轿车。试验过程中,通过CAN 总线接口采集车辆的运行参数信息和驾驶人驾驶操作信息等试验数据。
1.2 数据处理与驾驶人特性表征参数分析
不同驾驶风格的驾驶人,在行车过程中的操纵特征参数存在较大的差异,采用聚类方法将相同操纵特征类型的驾驶人归类为同组,找到聚类中心,以此来表征同组驾驶人的驾驶习惯。聚类试图将采集到的驾驶人驾驶数据集中的样本划分为若干个互不相交的子集(簇),通过这样的划分,每个簇可能会对应一些潜在的概念或者类别,如“激进型驾驶人”、“正常型驾驶人”和“保守型驾驶人”。
聚类方法采用k 均值算法,其思想是对聚类所得簇划分最小化平方误差E,如式(1)所示。

为体现驾驶人驾驶过程中的操纵特征,聚类所选用的驾驶人操纵行为特征参数为可直接体现驾驶人驾驶行为输入的车辆特征参数,即纵向加速度的最大值与最小值和转向盘转角变化率的极值。表1为40 名驾驶人中标号为前18 位的纵向加速度最大值与最小值和转向盘转角变化率极值滤波后的数据。
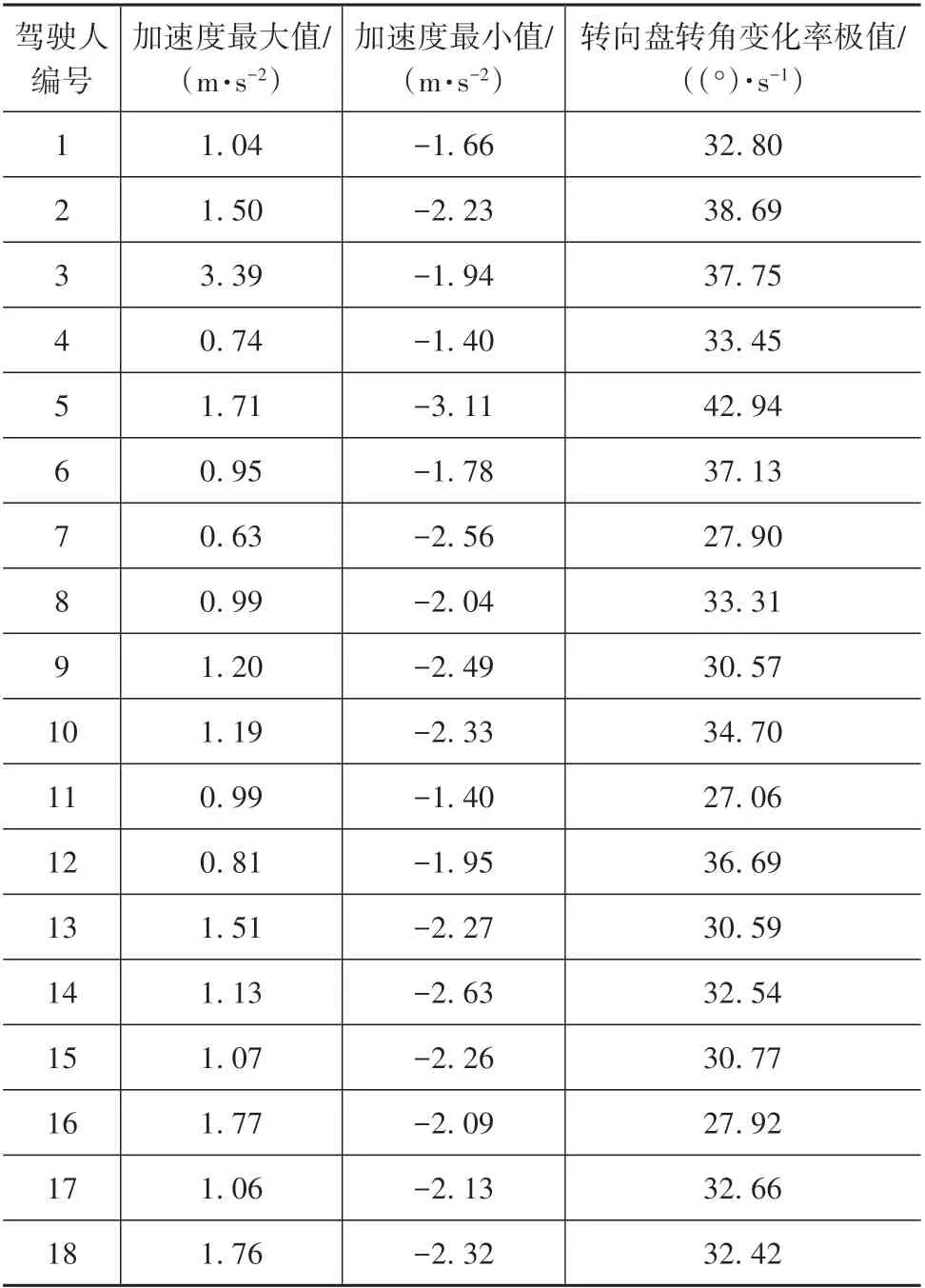
表1 驾驶人驾驶行为特征数据
参照文献[19]中驾驶人分类数目,取k 值为3。k均值聚类结果如表2所示。

表2 聚类结果
由表2可知:第1类驾驶人纵向最大加速度的最大值与最小值和转向盘转角变化率在一个比较小的范围中波动,体现为驾驶人能够接受车辆较小的加速度,对于方向控制也比较谨慎;第2 类驾驶人的纵向加速度最小值与最大值和转向盘转角变化率在较大的范围波动,经常的急加速、急减速、猛打转向盘,驾驶风格较为激进;第3 类驾驶人的驾驶习惯介于第1类驾驶人和第2类驾驶人之间。因此,本文将驾驶人按照特性差异分为激进型、保守型和正常型3种类型。相应的聚类结果中第1 类驾驶人为保守型驾驶人,第2 类驾驶人为激进型驾驶人,第3 类驾驶人为正常型驾驶人。后文中设计的不同特性控制器的约束条件和代价函数将参照对应特性驾驶人的聚类结果进行设置。
2 考虑驾驶人特性的路径跟踪控制器设计
模型预测控制(model predictive control,MPC)可通过控制某一种性能指标或者某几种性能的综合指标接近最优来实现滚动优化和校正确定控制输出。本文中采用MPC 算法设计路径跟踪控制器,控制器结构如图1所示。
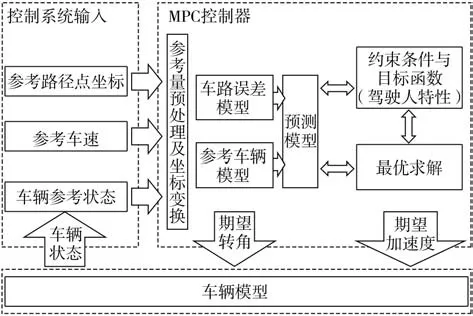
图1 路径跟踪控制器结构
2.1 预测模型
如图2 所示,在大地坐标系XOY中,F点为前轴的中心点,R点为后轴的中心点,R点的坐标为(x,y),φ为车辆的横摆角,ω为横摆角速度,δ为前轮的等效转角,v为后轴速度,l为车辆轴距。
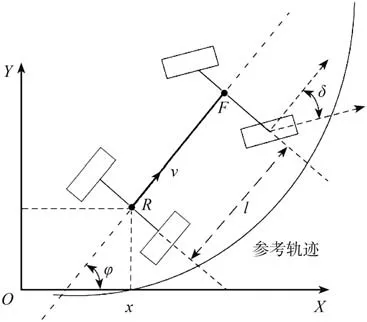
图2 车辆运动示意图
假设车辆等速圆周行驶,根据车辆动力学相关定义,可将车辆稳态横摆角速度增益表示为
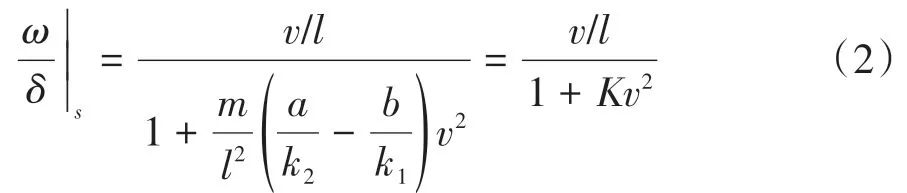
式中:a、b分别为车辆质心到前、后轴的距离;k1、k2分别为前、后轴侧偏刚度;为稳定性因数。假设车辆处于中性转向,取K= 0,则车辆横摆角速度增益可表达为

经过离散化处理的车辆模型如式(4)~式(7)所示。

为方便计算车辆行驶过程中的车辆位置点与参考路线之间的侧向误差和横摆角误差,将参考点在笛卡尔坐标系下的坐标点转换为车体坐标系下的坐标点。在笛卡尔坐标下,车辆坐标(xcar,ycar)和参考点坐标(xref,yref)的横坐标之差为Δx,纵坐标之差为Δy,如式(8)和式(9)所示。

设转化后参考点在车体坐标系下的新坐标为(xtrans,ytrans),写成矩阵形式,如式(10)所示。

转化到车体坐标系下的坐标点用三次多项式进行拟合,拟合方程为

则车辆模型的初始侧向误差为ctet=0=f(0)=a0,初始横摆角偏差为e_φt=0= arctanf(0)′,在任意时刻t,侧向误差和横摆角误差分别为

t+1时刻的侧向误差和横摆角误差分别为

经整理后,t+1时刻的侧向误差和横摆角误差分别为

预测模型包含车辆模型和误差模型,由式(4)~式(7)、式(16)和式(17)联立得到。预测模型状态方程包含6 个状态量:车辆横坐标x、纵坐标y、横摆角φ、车速v、侧向误差cte、横摆角误差e_φ;输入控制量为前轮转角δ和车辆纵向加速度a。
2.2 基于驾驶人特性的约束设计
为便于计算预测时域内的最优输入,将模型预测问题转化为非线性规划问题。设预测时域为N,该非线性规划问题的变量类型共有8 种,计6N+(N- 1)× 2 个,分别为:[x1x2…xN],[y1y2…yN],[φ1φ2…φN], [v1v2…vN], [cte1cte2…cteN],[e_φ1e_φ2…e_φN],[δ1δ2…δN-1],[a1a2…aN-1]。式(18)和式(19)为约束条件,其中,式(19)中δb、δa分别表示转向盘转角的最小值和最大值。
控制器输出量为前轮转角与车辆的纵向加速度。不同风格的驾驶人在驾驶过程中对于车辆纵向加速度的控制有不同的偏好,为在路径跟踪过程中更好地模拟驾驶人的驾驶习惯,故应对模型预测控制器的输出量做出适应驾驶人特性的约束。将表2中不同特性驾驶人纵向加速度的最大值、最小值作为约束的上、下界,如式(20)所示。
仿真试验中控制器参数按照表2中驾驶人驾驶数据聚类结果进行设置。正常型特性控制器加速度的最小值设置为amin_正常=-2.06 m·s-2,最大值设置为amax_正常=1.34 m·s-2;保守型特性控制器加速度的最小值设置为amin_保守=-2.12 m·s-2,最大值设置为amax_保守=1.18 m·s-2;激进型特性控制器加速度的最小值设置为amin_激进=-3.11 m·s-2,最大值设置为amax_激进=1.71 m·s-2。
2.3 基于驾驶人特性的代价函数设计
代价函数如式(21)所示。式中:cte为车辆预测点与轨迹参考点之间的距离误差;ef为车辆预测点和轨迹参考点之间的横摆角误差;fc为横摆角变化率;ve为预测车速与参考车速之间的差值;δc为转向盘转角变化率;K1、K2、K3、K4、K5、K6为各代价项的权重,代价函数中各项系数所占的权重可表征不同特性驾驶人的驾驶偏好。其中,K6项表征驾驶人对于不同转向盘转角变化率的不同偏好。本文中设定激进型驾驶人这项系数较小,保守型驾驶人这项系数较大,如表3所示。


表3 不同特性控制器代价函数权重系数
3 仿真试验
仿真中将按照不同驾驶人特性设计的路径跟踪控制器分别命名为“正常型特性控制器”、“保守型特性控制器”和“激进型特性控制器”。
仿真中离散化周期为0.1 s,预测时域和控制时域设置为7。仿真中采用的车辆模型的参数如表4所示。

表4 仿真车辆参数
3.1 跟踪直线路径
仿真中,车辆以XOY坐标系中(0,0)为起始点,初始时车辆以3 m·s-1沿着y=0 直线行驶,横摆角为0;目标状态是以10 m·s-1车速跟踪y=1 直线行驶,理想横摆角为0,路面附着系数为0.8。试验结果如图3所示。
由图3(a)可知,3 种不同特性控制器都能够较快地跟踪到预期轨迹,侧向轨迹误差较小,最大误差小于0.01 m。由图3(b)可知不同特性的控制器均能够准确地跟踪期望速度,3 种控制器输出的最大加速度不同,达到目标车速的时间也不同。激进型特性控制器比保守型、正常型特性控制器提前达到目标车速。在仿真初始阶段约0~2 s,加速换道行驶时,激进型特性控制器所产生的横摆角速度波动幅度稍大一些;在4.2~7.8 s 仿真阶段,激进型特性控制器横摆角速度波动幅度比保守型的要小,这是因为保守型特性控制器提供的最大加速度较小,在此阶段保守型特性控制器处于加速与跟踪目标路径并存的状态,但激进型特性控制器已经达到目标车速并跟踪上目标路径。

图3 目标车速10 m·s-1的直线路径跟踪效果
3.2 跟踪正弦曲线路径
仿真中,车辆从3 m·s-1初速度加速至目标车速8、10 和12 m·s-1,并跟踪y=0.5sin(0.1πx)正弦曲线路径(最小曲率半径约20 m),路面附着系数为0.8。路径跟踪效果分别如图4~图6所示。不同特性控制器达到目标车速时间如表5所示。

图4 目标车速8 m·s-1的曲线路径跟踪效果
从图4(a)~图6(a)和图4(b)~图6(b)中路径跟踪效果图和速度变化曲线可看出,在不同目标车速下,不同特性控制器均能够快速精确地跟踪正弦曲线路径与目标车速。稳态速度误差在2%以内,侧向轨迹误差小于0.13 m。与上述3.1 中直线路径跟踪效果类似,不同特性控制器达到目标车速所用时间是有差异的。由表5 可见,最先达到目标车速的是激进型特性控制器,其次是正常型特性控制器,最后是保守型特性控制器。
由图4(c)~图6(c)中的加速度曲线可以看出,仿真过程中激进型特性控制器最大加速度在1.75 m·s-2左右,正常型特性控制器最大加速度在1.26 m·s-2左右,保守型特性控制器最大加速度在1.1 m·s-2左右。激进型特性控制器比保守型特性控制器更早完成车辆加速过程,更快达到目标车速。
由图4(d)~图6(d)看出,在横摆角速度响应方面,不同特性控制器的横摆角速度响应变化有所差异。其中,激进型特性控制器的横摆角速度相位相对提前,保守型特性控制器的横摆角速度相位相对滞后,正常型特性控制器的相位则介于两者之间。随着目标车速的提高,3 种控制器之间的横摆角速度相位差加大。
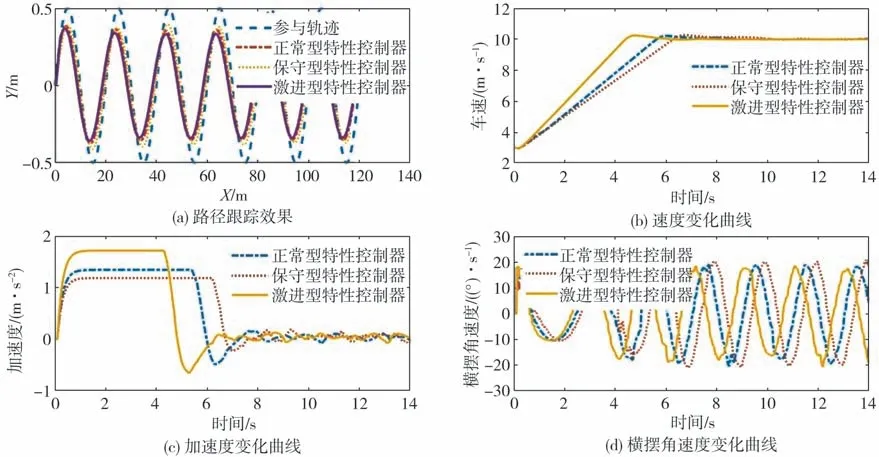
图5 目标车速10 m·s-1的曲线路径跟踪效果
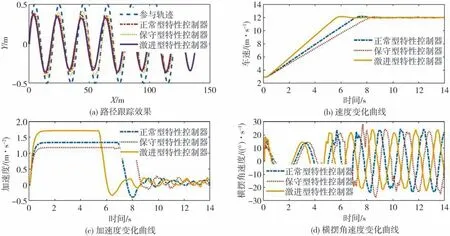
图6 目标车速12 m·s-1的曲线路径跟踪效果

表5 不同特性控制器达到目标车速时间
3.3 低附着路面跟踪正弦曲线路径
仿真中,车辆从3 m·s-1初速度加速至目标车速10 m·s-1,并跟踪前述正弦曲线,路面附着系数为0.3,路径跟踪效果如图7中所示。
从图7(a)和图7(b)可以看出,不同类型特性控制器在低附着路面下均可较好地跟踪理想路径与目标车速。从图7(b)和图7(c)可知,在车辆加速过程中,即使不同特性控制器输出的加速度存在差异,但是不同特性控制器达到目标车速的加速时间却基本相同。这是因为路面附着系数较低,地面附着力较小,车辆只能以路面实际提供的驱动力进行加速。
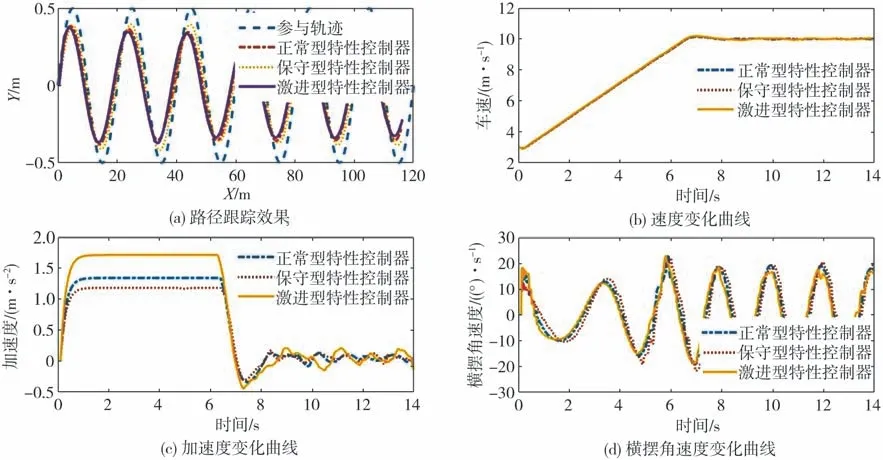
图7 低附着路面条件路径跟踪效果
综上所述,本文中所设计的智能驾驶路径跟踪控制器在保证轨迹跟踪精度和速度跟踪精度的同时,能够为不同风格驾驶人提供不同特性的驾驶人操纵特征,也使车辆具有与之相对应的响应特性,使不同风格驾驶人对车辆响应需求得到满足。具体来讲,在车辆纵向响应方面,保守型特性控制器速度跟踪较慢,激进型特性控制器速度跟踪较快,正常型特性控制器速度跟踪介于两者之间。在车辆侧向响应方面,保守型特性的控制器横摆角速度曲线相位存在滞后现象,激进型特性控制器横摆角速度相位有一定程度的提前,正常型特性控制器横摆角速度相位介于两者之间。这说明不同特性控制器能够体现不同驾驶人的特性。
4 结论
(1)本文中研究了智能驾驶路径跟踪控制问题,考虑在实现智能车辆路径跟踪、速度跟随控制的同时,确保不同风格驾驶人对车辆循迹过程中响应特性的需求。设计了考虑驾驶人特性的智能驾驶路径跟踪策略,实现了能够体现驾驶人特性的智能汽车路径跟踪控制和速度跟随控制。
(2)分析了真实驾驶场景下不同风格驾驶人操纵特征参数的规律性与差异性,采用聚类方法将驾驶人特性分为“正常型”、“保守型”和“激进型”3 类。基于3 类驾驶人特性的聚类结果,设计路径跟踪控制器的代价函数和约束条件,完成了模型预测控制路径跟踪控制器设计。
(3)仿真结果表明,所提出的考虑驾驶人特性的智能驾驶路径跟踪算法能够实现精确快速的路径跟踪与车速跟踪功能,同时路径跟踪过程中能够体现不同的驾驶人特性,满足不同风格驾驶人的不同驾驶习惯和对车辆响应特性的需求。提高了智能驾驶系统路径跟踪控制算法的智能化水平。
