基于改进人工势场法的汽车弯道超车路径规划与跟踪控制
2021-05-12张家旭
张家旭,王 晨,赵 健
(1. 吉林大学,汽车仿真与控制国家重点实验室,长春130022;2. 中国第一汽车集团有限公司智能网联研发院,长春130011)
前言
随着第四次工业革命的到来,可有效解决交通拥堵和交通安全问题的无人驾驶技术已经成为汽车行业的大势所趋。虽然目前无人驾驶汽车的商业化较遥远,但无人驾驶汽车必然会成为未来汽车的最终形态。而汽车换道路径规划算法和跟踪策略是无人驾驶汽车实现商业化的重要基础,因此深入研究汽车换道路径规划算法和跟踪控制策略对推动无人驾驶汽车的商业化具有重要的现实意义[1-2]。
目前,国内外汽车厂商和学者对无人驾驶技术涉及的汽车换道路径规划算法和跟踪控制策略进行了许多研究,它们大致可分为:以避让静止障碍物为目标的汽车换道路径规划算法和跟踪控制策略;以避让运动障碍物为目标的汽车换道路径规划算法和跟踪控制策略。文献[3]中基于七次多项式曲线提出了一种汽车换道路径规划算法,并设计了一种模型预测路径跟踪控制策略,引导汽车避让静止障碍物。文献[4]中提出了等速偏移函数与正弦函数加权叠加的汽车换道路径规划算法,并结合径向基神经网络可无限逼近任意未知函数和滑模控制方法对外界扰动具有强鲁棒性的优势,提出了一种神经网络滑模路径跟踪控制策略,实现规划路径的跟踪控制。文献[5]中针对汽车高速紧急避让静止障碍物工况,遵循先采样后选择的原则开发了一种汽车换道路径规划算法,并基于内模原理设计了一种对模型不确定性和外界干扰具有强鲁棒性的汽车换道路径跟踪控制策略。文献[6]中基于分段正弦曲线提出了一种汽车换道路径规划算法,并基于模型预测控制方法设计了一种汽车换道路径跟踪控制策略,引导汽车避让静止障碍物。文献[7]中针对汽车弯道紧急避让静止障碍物工况,基于梯形加速度剖面法提出了一种路径规划算法,并利用积分反推法推导出了具有快速收敛特征的路径跟踪策略,使汽车在弯道行驶过程中可以避让静止障碍物。
相对于以避让静止障碍物为目标的汽车换道路径规划算法和跟踪控制策略,以避让运动障碍物为目标的汽车换道路径规划算法和跟踪控制策略在二维空间的基础上引入时间维度,以考虑不同时刻障碍物运动状态对汽车换道路径规划算法和跟踪控制策略的影响。文献[8]中基于汽车运动学方程将汽车换道路径规划问题转化为多项式曲线参数的约束最优化问题,并利用遗传算法的全局搜索能力求解该约束最优化问题,进而得到满足安全、舒适要求的可行路径。同时,文献[8]中基于模糊PID 控制方法提出了一种汽车换道路径跟踪控制策略,保证汽车在不同速度下均可以快速、准确和稳定地跟踪目标路径。文献[9]中综合考虑汽车换道过程的安全性与舒适性需求和汽车运动学与动力学约束,结合滚动优化思想和模型预测控制方法提出了汽车换道路径规划算法和跟踪控制策略,使汽车能够自主避让运动障碍物。文献[10]中针对汽车高速紧急换道避让工况,采用六次多项式曲线规划出可引导汽车避让运动障碍物的平滑路径,并采用模型预测控制方法设计了底盘集成控制策略,通过协调主动前轮转向系统和直接横摆力矩系统来实现规划路径的跟踪控制。
鉴于少有文献对汽车弯道超车工况的路径规划算法和跟踪控制策略展开深入的研究,本文中借鉴以上汽车换道路径规划算法和跟踪控制策略,提出一种基于改进人工势场法的汽车弯道超车路径规划算法,以及基于线性鲁棒控制理论提出一种汽车弯道超车路径跟踪最优保性能控制策略。结果表明:所提出的路径规划算法和跟踪控制策略可以安全、舒适地引导汽车完成弯道超车工况。
1 汽车弯道超车路径规划
汽车弯道超车路径用于引导汽车超越其同车道行驶较慢的车辆,并在超越后引导汽车安全地驶回原车道。汽车弯道超车路径如图1 所示,建立以弯道中心线圆弧的圆心O为原点的固定坐标系OXY,内侧和外侧弯道中心线圆弧的半径分别为RI和RO,本车和同车道行驶较慢的车辆均行驶在内侧弯道中心线上。以最小化本车行驶路径弧长为目标,采用以极坐标表示的螺旋下降函数构建弯道引力势能场[11]:

式中R和θ分别为本车质心点的极径和极角。

图1 汽车弯道超车路径
根据式(1)得到的弯道引力势能场沿弯道变化的三维分布图如图2 所示,弯道引力势能场的势能随本车质心点极径增加而增大,随本车质心点的极角增加而减小。

图2 弯道引力势能场
汽车弯道超车路径通常是可执行的连续平滑曲线,而斜坡正弦函数是符合驾驶员弯道超车操纵特性的连续平滑曲线,适合于描述汽车弯道超车路径。因此,基于斜坡正弦函数构建同车道行驶较慢车辆的斥力势能场:

式中ΔR(θ)为斜坡正弦函数描述的极径增量,可表示为[12]

式中:Wd为车道宽度;θ1、θ0和θ2分别为同车道行驶较慢车辆几何中心点的极角、同车道行驶较慢车辆后方和前方斜坡正弦函数起点的极角。根据式(3)得到的同车道行驶较慢车辆的斥力势能场三维分布图如图3 所示,在同车道行驶较慢车辆几何中心点处取得最大值,并且在本车质心点极角固定不变时随本车质心点极径与内侧弯道中心线半径偏差增大而以指数方式减小。
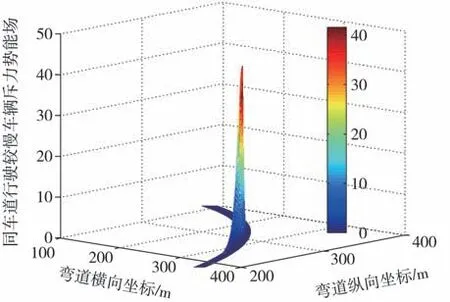
图3 同车道行驶较慢车辆斥力势能场
考虑弯道边界危险系数较大,基于指数函数构建弯道边界斥力势能场:
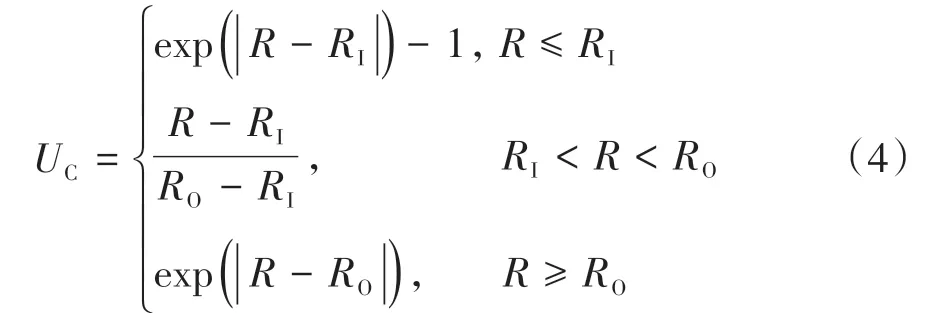
根据式(4)得到的弯道边界斥力势能场三维分布图如图4 所示。由图可见:弯道边界斥力势能场从内侧弯道中心线开始随本车质心点极径减小而以指数方式增大;从外侧弯道中心线开始随本车质心点极径增大而以指数方式增大;在内侧弯道中心线和外侧弯道中心线之间,弯道边界斥力势能场随本车质心点极径增大而线性增大。
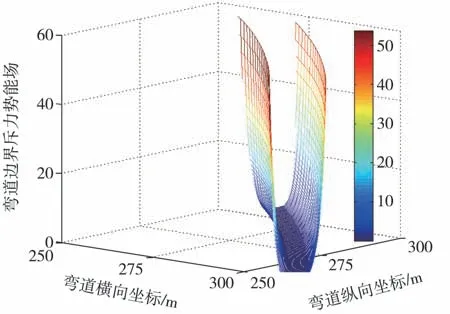
图4 弯道边界斥力势能场
由式(1)~式(4)描述的弯道引力势能场、同车道行驶较慢车辆斥力势能场和弯道边界斥力势能场,可得本车质心点的人工势能场:

基于式(5)描述的本车质心点人工势能场,采用图5 所示的增量搜索算法规划汽车弯道超车路径。假设k时刻本车质心点的极角为θk,同车道行驶较慢车辆几何中心点的极角为θ1,k、同车道行驶较慢车辆后方和前方斜坡正弦函数起点的极角分别为θ0,k和θ2,k,若k时刻到k+ 1 时刻本车质心点的极角增量为Δθ,则k+ 1 时刻本车质心点的极角、同车道行驶较慢车辆几何中心点的极角、同车道行驶较慢车辆后方和前方斜坡正弦函数起点的极角可分别表示为
式中vH,k和vG,k分别为本车和同车道行驶较慢车辆的速度。
沿着k+ 1 时刻本车质心点极角θk+1方向均匀撒点得到k+ 1时刻本车质心点极径的集合:

式中:Rk为k时刻本车质心点的极径;Δd为本车质心点极径增量;2n+ 1为集合SRk+1元素数量。
采用式(5)计算k+ 1时刻本车质心点极径集合中的每一个元素对应的人工势能场,并将人工势能场最小值对应的集合元素作为k+ 1 时刻本车质心点的极径Rk+1。同时,采用式(11)可将k+ 1 时刻本车质心点极坐标(Rk+1,θk+1)转化为笛卡尔坐标(xk+1,yk+1),即可利用图5 所示的增量搜索算法规划出汽车弯道超车路径。


图5 增量搜索算法
2 汽车弯道超车路径跟踪控制
在汽车弯道超车路径规划过程中,通过调整基于斜坡正弦函数构建的同车道行驶较慢车辆的斥力势能场,可以使汽车的操纵特性始终保持在线性工作区域。因此,本节中假设汽车前轴和后轴等效侧偏刚度为不确定性参数,基于线性2 自由度汽车动力学模型建立汽车弯道超车路径跟踪动态模型,如图6 所示,并以此为基础求解汽车弯道超车路径跟踪最优保性能控制律。

图6 汽车弯道超车路径跟踪动态模型
图6中,以当前k时刻汽车质心点为原点,建立固定于汽车的动坐标系ObXbYb,将半径为RT、圆心为点Ob的圆弧与汽车弯道超车路径的交点作为当前k时刻参考点。并以此参考点为原点建立另一个动坐标系OXY,使其X轴恒与汽车弯道超车路径上参考点处的切换方向重合,称之为路径坐标系。将汽车质心点在路径坐标系OXY的纵坐标值yc、汽车相对于固定路径坐标系OXY的方位角θ、汽车侧向速度vy、汽车横摆角速度γ作为状态量e=[ycθ vy γ]T,将汽车前轮转向角δf作为控制量u=δf,建立汽车弯道超车路径跟踪动态模型[13]:

式中:A和B分别为汽车前轴和后轴等效侧偏刚度名义值对应的系统矩阵和控制矩阵;ΔA和ΔB分别为汽车前轴和后轴等效侧偏刚度摄动产生的不确定系统矩阵和不确定控制矩阵。
式中:T为采样时间间隔;M和Iz分别为汽车质量和汽车绕过质心垂直轴的转动惯量;Lf和Lr分别为汽车质心点到前轴和后轴的距离;Cf和Cr分别为汽车前轴和后轴等效侧偏刚度名义值;F为时变的未知矩阵,并且满足FTF≤I;D、E1和E2为描述不确定系统矩阵和不确定控制矩阵结构信息的适当维数的矩阵。
式中Cfe和Cre分别为汽车前轴和后轴等效侧偏刚度摄动量最大值。
综合考虑汽车弯道超车路径跟踪误差和控制能量消耗,定义二次型性能指标为

式中Q和R分别为给定的对称正定加权矩阵。
利用文献[14]和文献[15]中提出的等价条件求解汽车弯道超车路径跟踪最优保性能控制律,使汽车弯道超车路径跟踪闭环系统是鲁棒的,渐近稳定的,并使式(19)描述的二次型性能指标最小化问题转化为式(20)描述的关于变量ε> 0、矩阵W、对称正定矩阵X和H的线性矩阵不等式组约束的凸优化问题。

式中Trace(·)为求解矩阵迹的运算符。
通过求解式(20)描述的线性矩阵不等式组约束的凸优化问题,可得到最优的,进而得到如下汽车弯道超车路径跟踪最优保性能控制律:

3 仿真结果与分析
本节利用高精度的车辆动力学软件CarSim仿真验证基于改进人工势场法提出的汽车弯道超车路径规划算法和基于线性鲁棒控制理论提出的汽车弯道超车路径跟踪最优保性能控制策略的可行性和有效性。在仿真验证过程中,本车和同车道行驶较慢车辆的速度分别设置为31.95和6.39 m/s,内侧和外侧弯道半径分别设置为500 和503.75 m,本车的基本参数设置为M=1 416 kg、Iz=1 523 kg·m2、Lf=1.016 m、Lr=1.562 m、Cf=Cr=80000 N/rad 和Cfe=Cre=2000 N/rad,本车与同车道行驶较慢车辆在不同时刻的相对位置如图7所示,本文中提出的汽车弯道超车路径跟踪控制方法和斯坦福大学提出的斯坦利方法的仿真结果对比如图8所示[16]。

图7 本车与同车道行驶较慢车辆在不同时刻的相对位置

图8 汽车弯道超车路径跟踪控制仿真对比结果
由图7 可见,本文中提出汽车弯道超车路径规划算法可以安全地引导汽车超越其同车道行驶较慢的车辆,并在超越后引导汽车安全的驶回原车道。由图8 可见,本文中提出的汽车弯道超车路径跟踪控制方法和斯坦福大学提出的斯坦利方法均可稳定地跟踪汽车弯道超车目标路径、目标方位角和目标横摆角速度,且二者均可使汽车的操纵特性始终保持在线性工作区域,但本文中提出的汽车弯道超车路径跟踪控制方法的控制精度较高,汽车侧向加速度峰值更小,从而使本车在弯道超车过程中保持更好的操纵特性,另外,在8-10 s 时间段呈现出更平滑、更快速的控制效果,从而使本车的侧向加速度更快速地恢复到稳定状态。
4 结论
(1)基于改进人工势场法提出了一种汽车弯道超车路径规划算法。采用螺旋下降函数、斜坡正弦函数和指数函数构建弯道引力势能场、同车道行驶较慢车辆斥力势能场和弯道边界斥力势能场,三者之和构成汽车弯道超车路径的搜索空间。设计可应用于动态环境的增量搜索算法,逐步搜索汽车弯道超车路径搜索空间的最快下降方向,沿着该方向即可生成一条平稳、安全、舒适的汽车弯道超车路径。
(2)基于线性鲁棒控制理论提出了一种汽车弯道超车路径跟踪最优保性能控制策略。以线性2 自由度汽车动力学模型为基础,建立包含参数摄动的汽车弯道超车路径跟踪误差动态模型作为名义模型,基于线性鲁棒控制方法设计汽车弯道超车路径跟踪最优保性能控制策略,控制汽车快速、准确和稳定地跟踪规划出的目标路径。
(3)利用车辆动力学软件仿真验证所提出的汽车弯道超车路径规划算法和路径跟踪最优保性能控制策略的可行性和有效性。结果表明:所提出的汽车弯道超车路径规划算法和路径跟踪最优保性能控制策略可安全、舒适地引导汽车完成弯道超车工况。
