基于骨架和最优传输距离的玉米点云茎叶分割和表型提取
2021-05-09许童羽邓寒冰周云成
朱 超,苗 腾,许童羽,李 娜,邓寒冰,周云成
(1. 沈阳农业大学信息与电气工程学院,沈阳 110866;2. 辽宁省农业信息化工程技术研究中心,沈阳 110866)
0 引 言
玉米(Zea mays L.)是世界上重要的粮食作物,其产量对保障全球粮食供应至关重要。表型分析可辅助玉米育种,提高玉米产量[1]。传统表型参数获取方法主要是人工测量,效率低、主观性强、破坏性强[2]。近年来,计算机视觉技术的发展为作物表型参数的自动测量提供了条件[3-4]。
基于二维数字图像的视觉技术率先被应用于植物表型参数的提取[5-7]。Granier等[8]设计了Phonopsis成像系统,通过图像提取叶片和根的生长信息来监测植物对土壤水分的响应。Pan等[9]使用高分辨率的数码相机图像来估计作物覆盖率。Tanabata等[10]利用图像分析方法识别水稻种子轮廓并计算种子长、宽、周长等性状参数。
随着三维激光扫描仪[11]、飞行时间相机[12]以及激光雷达[13]等三维传感器的普及,基于三维点云的视觉技术被用于作物表型研究,如作物识别[14]、长势监测[15]、冠层重建[16-17]以及各类表型参数的测量[18-21]等,这些研究证明了从三维空间提取植物表型具有更高的稳健性和准确性[22-23]。为了提取器官尺度的表型参数,需要在植株点云上进行器官分割。Wu等[24]提取玉米植株的三维骨架,并在骨架上实现器官分割,进而提取叶、茎尺度的表型参数。Elnashef等[25]提出了一种基于张量的三维点云分类与分割算法,利用一阶和二阶张量分析实现茎、叶点云分类,再采用基于密度的空间聚类算法[26]对叶片进行分割,但这种聚类方法不能处理顶部新叶点云紧密挨在一起的情况。Jin等[27]开发了基于中值归一化向量的区域生长茎叶分割算法,该算法首先手动标记出茎底部的点云,然后通过中值归一化向量计算区域生长方向,从叶基到叶尖依次对每个叶片进行分割。该方法简单有效,对中下部叶片的分割效果很好,但对于新叶,容易出现误分割现象。
目前,玉米植株点云的茎叶分割方法对于完全展开的叶片是有效的,但是对于间距小或相互包裹在一起的新生叶,分割效果仍然较差。针对该问题,本研究提出一种基于骨架和最优传输距离的茎叶点云分割方法,尝试自动对植株顶部的新生叶进行准确分割,为玉米高通量表型检测、三维几何重建提供技术手段。
1 材料与方法
1.1 点云数据获取与预处理
田间试验于2019年5月至7月在沈阳农业大学玉米试验田进行。选取种植行距60 cm、株距25 cm的苗期、拔节期玉米为研究对象,使用FreeScan X3手持激光扫描仪进行三维点云获取,该激光扫描仪的主要参数如表1所示。
数据采集时,为防止玉米叶片萎蔫,将植株移植到盆中后立即浇水,随即将玉米转移到室内进行点云数据采集。由于FreeScan X3扫描仪需要借助激光感光片进行三维定位,因此数据采集时,将粘贴有感光片的多个支架围在植株四周,保证激光线能同时扫描到植株和感光片。为提高数据获取质量,采集时将扫描仪与玉米植株之间的距离控制在300 mm之内。整个数据获取过程如图 1a所示。扫描得到的原始点云数据中除了植株外,还包含了部分支架和花盆的点云(图1b)。使用三维点云处理软件CloudCompare将支架点和花盆点云手动去除,并进行下采样处理,得到最终的玉米植株点云(图1c)。下采样后,每个植株点云包含5 000~8 000个点,该数量的点云即可保留玉米植株的形态特征,也能对骨架进行高效提取。
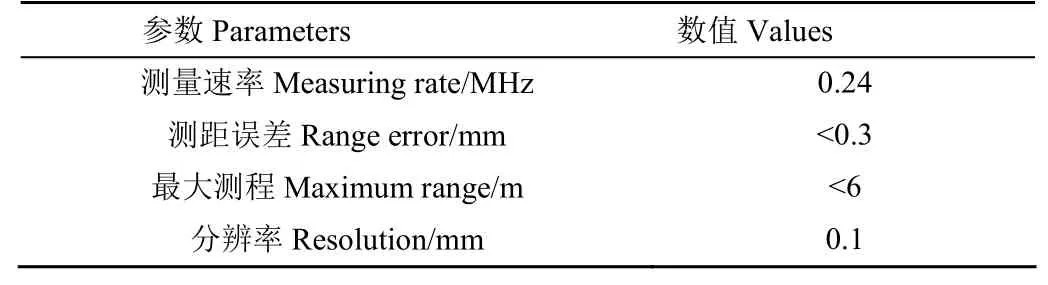
表1 FreeScan X3激光扫描仪主要参数Table 1 Main parameters of FreeScan X3 laser scanner
1.2 茎叶分割方法
本研究提出的茎叶分割方法以植株散乱点云为输入,通过骨架提取、骨架分解、点云坐标系变换、粗分割、精细分割和表型参数提取6个主要步骤,实现对茎叶器官的准确分割和表型参数的自动测量。
1.2.1 骨架提取
采用拉普拉斯骨架提取算法[28]生成玉米植株骨架。给定一个玉米植株点云集合P,首先找到P中每个点的K近邻点计算拉普拉斯坐标,并利用拉普拉斯收缩操作将P收缩成零体积点云集合C,K为用户设定的最近邻参数;其次,使用最远距离采样策略从C中采样得到骨架顶点集合U;然后将U中所有相邻的骨架顶点相连,任意2个相邻顶点均会生成1条边,所有边形成的边集合用符号E′表示;最后,使用边塌缩操作从边集合E′中去除冗余边,形成最终的边集合E。由骨架顶点集合U和边集合E表示的无向图G=(U,E),即为提取出的植株骨架。该骨架提取算法还为U中的每个骨架顶点保存了一个对应的点云集合。使用ui表示U中第i个(i>0)骨架顶点,其对应的点云集合用Ci表示,ui由Ci中的点云通过拉普拉斯收缩和最远距离采样操作获得。每个对应点云集合Ci都是植株点云集合P的子集,且C1∪C2∪…CN=P,N为骨架顶点的个数。拉普拉斯骨架提取算法生成的玉米植株骨架如图2所示,整个骨架由边和骨架顶点构成。称1条边上的2个顶点互为邻居,根据顶点邻居数量的不同,可将骨架顶点分为3类:
1)根顶点:仅有1个邻居的骨架顶点。
2)连接顶点:有2个以上邻居的骨架顶点。
3)分支顶点:只有2个邻居的骨架顶点。
拉普拉斯骨架提取算法中的最近邻参数K会显著影响植株骨架的提取结果。K值越大,骨架越光滑,抗噪声能力越强,但对顶部新生叶局部骨架的提取能力减弱。但过小的K值会增加冗余边,需要更多次的边塌缩操作来进行删除,从而减慢骨架提取算法的处理速度。通过试验,本研究明确了对参数K的2种设定方案。第一种方案针对顶部叶片间距较大的植株,K参数设为16;第二种针对顶部叶片间距较小的植株,K参数设为6。2种K参数设定方案对玉米植株骨架提取效果的影响如图3所示。植株顶部2个叶片间距较小时,如果采用第一种K参数设定方案,则其中1个叶片的骨架丢失(图3a),而采用第二种方案,新叶上半部的局部骨架被正确提取(图3b)。植株顶部叶片间距较大时,无论采用哪种方案,顶部叶片骨架均能正确提取(图3c和图3d)。
1.2.2 骨架分解
得到植株骨架之后,需将其分解为茎子骨架和叶片子骨架。从图2中的植株骨架拓扑结构可以看出,在根顶点中,存在唯一根顶点由茎点云生成(称为茎根顶点),其余根顶点均由叶尖点云生成(称为叶根顶点)。只需找到茎根顶点,即可较容易地识别出茎子骨架,进而提取叶片子骨架,因此茎根顶点是后续骨架分解的基础。
很多研究利用深度相机获取植株点云数据。在数据获取时可通过调整相机位置使植株点云所在坐标系的某个坐标轴与植株生长方向重合,因此通过坐标值即可较容易地确定茎点云的位置[29-30]。但是手持激光三维扫描仪获取的点云数据属于散乱点云,点云与所在空间坐标系间的关系是随机的,因此植株生长方向并未与某个坐标轴重合,这增大了茎根顶点的识别难度。本研究利用叶片形态特征对茎根顶点进行识别,具体步骤如下:
1)提取根连子骨架
采用迪杰斯特拉算法[31]提取每个根顶点到其拓扑距离最近的连接顶点间的最短路径,将最短路径形成的局部骨架称为根连子骨架。随后对每个根连子骨架中的顶点进行重排序。排序时,以根顶点作为子骨架的第一个顶点,并按边的连接顺序依次排列剩余顶点。
2)计算根连子骨架的单位方向向量
对于排序后的任一根连子骨架,选择中间位置的顶点和末端顶点,两者的空间坐标分别用符号ν1和ν2表示。利用上述2个顶点计算根连子骨架的单位方向向量空间坐标V,计算如式(1)所示
3)利用叶片形态特征识别茎根顶点
观察发现,正常玉米叶片中间到叶基的区域均朝向天空方向,因此叶片根连子骨架的方向向量也会朝向天空,相反茎根连子骨架的方向向量会朝向地面,2类子骨架方向向量的示意图如图4所示。其中,2个叶片根连子骨架的方向向量间的夹角会小于π/2;而茎根连子骨架的方向向量与叶片根连子骨架的方向向量的夹角会大于π/2。因此通过计算不同根连子骨架方向向量之间的夹角即可识别茎根顶点,具体计算方法如下。
用符号Vτ表示第τ个根连子骨架的单位方向向量,用符号Vφ表示第φ个根连子骨架的单位方向向量,则2个子骨架之间的夹角(θτφ,rad)可通过式(2)计算。
利用式(2)计算每个根连子骨架与其他所有根连子骨架的夹角,并求其平均值,平均值大于π/2的子骨架即为茎根连子骨架,该子骨架中的根顶点即为茎根顶点,其余根连子骨架的根顶点均为叶根顶点。
识别出根顶点的类型后,将植物骨架分解成多个叶片子骨架和1个茎子骨架。在植物骨架无向图G中,叶片根连子骨架直接作为叶片子骨架;采用迪杰斯特拉算法[31]提取茎根顶点到其最远连接顶点的最短路径作为茎子骨架,并对茎子骨架的顶点进行排序,以茎根顶点作为子骨架的第1个顶点,并按边的连接顺序依次排列剩余顶点。
1.2.3 点云坐标系变换
三维扫描仪获取的散乱点云数据与所在空间坐标系间的关系是随机的,不利于通过空间坐标值来判断点在植株上的相对位置,因此本研究构建了一个更符合玉米形态特征的植株坐标系,并将点云坐标从原始坐标系转换到植株坐标系中。利用骨架分解得到的茎子骨架构建植株坐标系,具体包含以下3个步骤:
1)采用随机抽样一致算法[32]对茎子骨架中的骨架顶点进行单位方向向量拟合,该向量用符号L1表示,L1的负方向指向茎根顶点。
2)将植株点云投影到与L1垂直的二维平面获得二维投影点,采用主成分分析算法[33]计算投影点的第一主成分向量和第二主成分向量,分别用符号L2和L3表示。
3)构建植株坐标系:茎根顶点作为植株坐标系的原点O;方向向量L2、L3和L1分别作为植株坐标系的X轴、Y轴和Z轴。
得到植株坐标系后,将植株点云和骨架顶点的坐标值从原始坐标系转换到植株坐标系。对于任意三维点p,设其在原始坐标系下的三维坐标为(p(x)’,p(y)’,p(z)’),在植株坐标系下的坐标为(p(x),p(y),p(z)),2组坐标值的转换可通过式(3)计算得到。
式中L1(x)、L1(y)、L1(z)分别表示原始坐标系下,方向向量L1的X、Y、Z轴坐标值;同理,L2(x)、L2(y)、L2(z)表示L2在原始坐标系下的X、Y、Z轴坐标值;L3(x)、L3(y)、L3(z)表示L3在原始坐标系下的X、Y、Z轴坐标值;O(x)、O(y)、O(z)表示植株坐标系原点O在原始坐标系下的X、Y、Z轴坐标值。
在植株坐标系下,可通过Z轴坐标来明确一个点在植株上的高度,Z坐标越大,该点在植株上所处的位置越高。本研究后续的分割算法均在植株坐标系中进行。
1.2.4 粗分割
为了便于描述后续点云分割过程,定义Øu表示未分割的点云集合;定义A0表示已分割的茎点云集合;定义Ak(1≤k≤m)表示已分割的叶片点云集合,其中m表示叶片子骨架的数量。将茎点云集合和叶片点云集合统称为器官点云集合。
利用分解出的茎、叶子骨架进行粗分割。在骨架提取时,已为每个骨架顶点ui均保存了一个对应点云集合Ci,借助这些对应点云集合可以实现茎叶器官的粗分割。粗分割的具体步骤如下:
1)叶片点云粗分割
对于每个叶片子骨架,提取该子骨架中的所有骨架顶点,并将这些骨架顶点的对应点云集合合并,形成一个叶片点云集合。每个叶片子骨架均会分割出一个叶片点云集合,因此当叶片子骨架个数为m时,最终分割得到的叶片点云集合数量也为m。
2)茎点云粗分割
将茎子骨架中骨架顶点的对应点云集合合并,形成唯一的茎点云集合A0。
茎叶粗分割结果如图5a所示,其中,大量叶基部的点云被误分割到茎中,因此需要进行精细分割将这些误分割点从茎中移除,并分割到正确的叶片中。
1.2.5 精细分割
首先通过3个约束操作从茎点云集合A0中提取非茎点云,具体步骤如下:
1)高度约束
高度约束要求茎点云高度不能过高,超过一定高度的点大概率属于叶片。在茎子骨架中,按照骨架顶点排列顺序,倒序遍历顶点,找到第二个出现的连接顶点,将该连接顶点的Z坐标值作为阈值,与A0中点云的Z坐标进行比较,高于阈值的点从A0中移除,并加入未分割点云集合Øu中。
2)半径约束
半径约束要求茎点云与茎中轴的距离不能过大,超过一定距离的点大概率属于叶片。首先计算A0集合中所有点Z坐标的中值z1;再从A0中选出Z坐标小于z1/2的点拟合茎中轴,并计算这些点到茎中轴距离的平均值rc。如果A0中某个点到茎中轴的距离大于αrc(α为用户设定的半径参数,α>0),则将其从A0中移除,并加入集合Øu中。
3)距离约束
距离约束要求茎点云彼此之间的距离不能过大,超过一定范围的点大概率属于叶片。首先采用K-dTree搜索方法找到A0中每个点的32个空间邻近点,并计算该点到其所有邻近点的平均距离;随后估算所有平均距离的平均值d和方差s。如果某个点到其32个空间邻近点的平均距离大于d+s,则将该点从A0中移除,并加入集合Øu中。
通过上述3个约束操作,将A0中可能属于叶片的点转移到Øu中,转移之后的结果如图5b所示。
接下来,采用基于最优传输距离的茎叶分割算法,将Øu中的未分割点依次分割到对应的器官点云集合中,实现精细分割。茎叶分割算法的具体步骤如下:
1)计算植株点云的最优传输距离矩阵
本研究采用最优传输距离作为两点之间的距离度量。假设植株点云P共有n个点,ph(1≤h≤n)表示P中第h个点的三维坐标,pl(1≤l≤n)表示P中第l个点的三维坐标。ph与pl之间的最优传输距离dhl可通过基于Sinkhorn散度的最优传输算法[34]计算得到。该算法构建的约束方程如式(4)所示。
式中ε为用户设定的光滑参数。
通过Sinkhorn固定迭代法[35]对式(4)进行求解,得到一个最优传输距离矩阵D,该矩阵为n×n方阵,矩阵中的元素为2个点之间最优传输距离的倒数,例如,D中第h行、第l列的数值即为点ph和点pl之间的最优传输距离的倒数1/dhl。因此,得到矩阵D后,即可获得任意2个点之间的最优传输距离。光滑参数ε的设定会影响矩阵D的结果,ε越大,D矩阵对角线上的元素值越接近1/n,其余位置元素值越接近0;ε越小,D矩阵对角线上的元素值越小于1/n,其余位置元素值越大于0。
2)未分割点云排序
为提高新生叶的分割精度,本研究采用从植株上部到下部的顺序对Øu中的未分割点依次进行分割。将Øu中的点根据Z坐标值按从大到小的顺序进行排序,之后依次取出,执行步骤3。
3)点分割
从Øu中取出1三维点p,计算其到每个器官点云集合的距离。三维点p到一个器官点云集合的距离被定义为p与集合中所有点的最优传输距离的最小值。比较点p与所有器官点云集合之间的距离,将点p加入到距离最小的器官集合中。循环执行步骤3,直到Øu集合为空。精细分割的结果如图5c所示。
本研究采用了最优传输距离作为两点之间的距离度量。相比于欧氏距离,在本研究的分割流程中,使用最优传输距离能够更好地处理顶部大叶包裹小叶的情况。采用2种距离的顶部叶片分割效果对比如图6所示,其中,在含有大叶包裹小叶情况的点云区域,采用最优传输距离能够将最外部的大叶点云正确分割出来,而欧式距离会将大叶点云误分割为小叶点云。
1.2.6 表型参数提取
利用分割出的叶、茎器官点云提取表型参数,表型参数提取方法如图7所示。
株高参数(cm)提取值为植株点云Z坐标最大值和最小值的差值;冠幅参数(cm)提取值为植株点云X坐标最大值和最小值的差值。
利用茎点云提取茎高(cm)和茎粗(cm)参数。首先使用随机抽样一致算法拟合茎点云的中轴线段,该线段的长度作为茎高参数;之后计算每个茎点云到中轴的距离,所有距离的中值的2倍作为茎粗参数。
利用叶片点云提取叶长(cm)和叶宽(cm)参数。首先采用主成分分析方法计算叶片点云的3个主成分轴。其中第1主成分轴的2个端点之间的最短路径称为叶长路径,将该路径的长度作为提取的叶长参数。为了提取叶宽参数,首先沿叶长路径将叶点云切分成11个区间;然后在中间区间的点云中找到沿第2主成分轴的2个端点,并提取两者之间的最短路径T1,同时在这些点云中找到第3主分量轴的2个端点,并提取两者之间的最短路径T2,将T1和T2中的最长路径作为叶宽路径,其长度即为叶宽参数。
1.3 评价指标
本研究选取30株不同形态的玉米植株点云对茎叶分割和表型提取方法进行定量评估。
使用精确度(Precision)、召回率(Recall)、微F1分数(Micro F1-score)和总体准确率(Overall accuracy)对单个植株点云的茎叶分割精度进行评估[27]。利用CloudCompare软件手动分割植株点云获得分割真实值。假设1个玉米植株点云共有n1个点、M1个器官,对于其中第λ个器官点云集合,用TPλ表示属于该器官的点云被正确分割为该器官的点数量,用FPλ表示不属于该器官的点云被误分割成该器官的点数量,用FNλ表示属于该器官的点云被误分割为其他器官的点数量,则该器官点云的器官精确度Pλ和器官召回率Rλ可通过式(5)和式(6)计算得出。
玉米植株茎叶分割的精确度、召回率、微F1分数和可通过式(7)~式(10)进行计算。
采用线性回归分析评估表型参数的人工实测值与本研究方法提取值之间的关系,并使用决定系数R2(Coefficient of determination)和均方根误差(Root Mean Square Error,RMSE)进行定量化评估,计算如式(11)和式(12)所示
式中M2为表型数据样本个数;η为表型数据样本标号;qη为表型参数提取值;¯qη为表型参数提取值的平均值;Qη为参数人工实测值;¯Qη为参数实测值的平均值。
2 结果与讨论
2.1 茎叶点云分割
算法在配置为2.2 GHZ CPU、DDR 32 G内存的笔记本工作站上进行了测试。算法处理8 000个点左右的玉米植株,平均处理时间在16 s,其中70%的时间用于骨架提取。
2.1.1 算法参数
影响本研究分割效果的参数主要为半径参数α和光滑参数ε。
半径参数α影响茎点云分割结果,该值越大,分割得到的茎越粗越高;α值越小,茎越细越短(图8)。通过多次试验发现,针对苗期植株点云,α=1.0能够取得较好的效果;针对拔节期植株,α=0.8效果较好。
光滑参数ε会影响最优传输距离矩阵的计算,进而影响精细分割的结果。在本研究的精细分割流程中,相比于欧式距离,采用最优传输距离可以更好地处理大叶包裹小叶的情况。但随着光滑参数ε的增大,采用最优传输距离的分割结果会逐渐趋向于采用欧式距离的结果,当ε>50后,两者效果基本相同。通过试验发现,在本研究中ε=5时分割结果最好。不同光滑参数ε值下的分割效果如图9所示,当ε=5时,算法对顶部新叶的分割结果要远远好于ε=50和ε=100的情况;ε=50和ε=100时的分割结果基本相同,这是因为当ε较大时,采用最优传输距离的效果已经等同于欧式距离。
2.1.2 茎叶分割精度
将本研究茎叶分割方法与现有常用的点云分割方法进行对比,包括区域增长法[36]、法线差分法[37]和基于近似凹凸性分析的方法[38]。使用其他方法对玉米植株点云进行分割时,针对每个植株数据,均采用穷举策略来调整这些方法中的参数值,选取总体精度值最大的结果作为分割结果参与评估。除了对比上述3个方法外,还在本研究的茎叶分割流程中,将最优传输距离替换为欧式距离,形成基于骨架和欧式距离的方法参与结果评估。5种方法的分割精度对比结果如表2所示,本研究提出的基于骨架和最优传输距离的方法结果最好,30个样本的平均精确率、平均召回率、平均微F1分数和平均总体精度分别为0.967、0.961、0.964和0.967,略高于本研究提出的基于骨架和欧式距离的方法,远远高于另外3种方法的各类指标。结果说明,本研究构建的茎叶分割方法流程更加适合进行玉米植株点云分割,而最优传输距离作为点的距离度量要好于欧式距离。
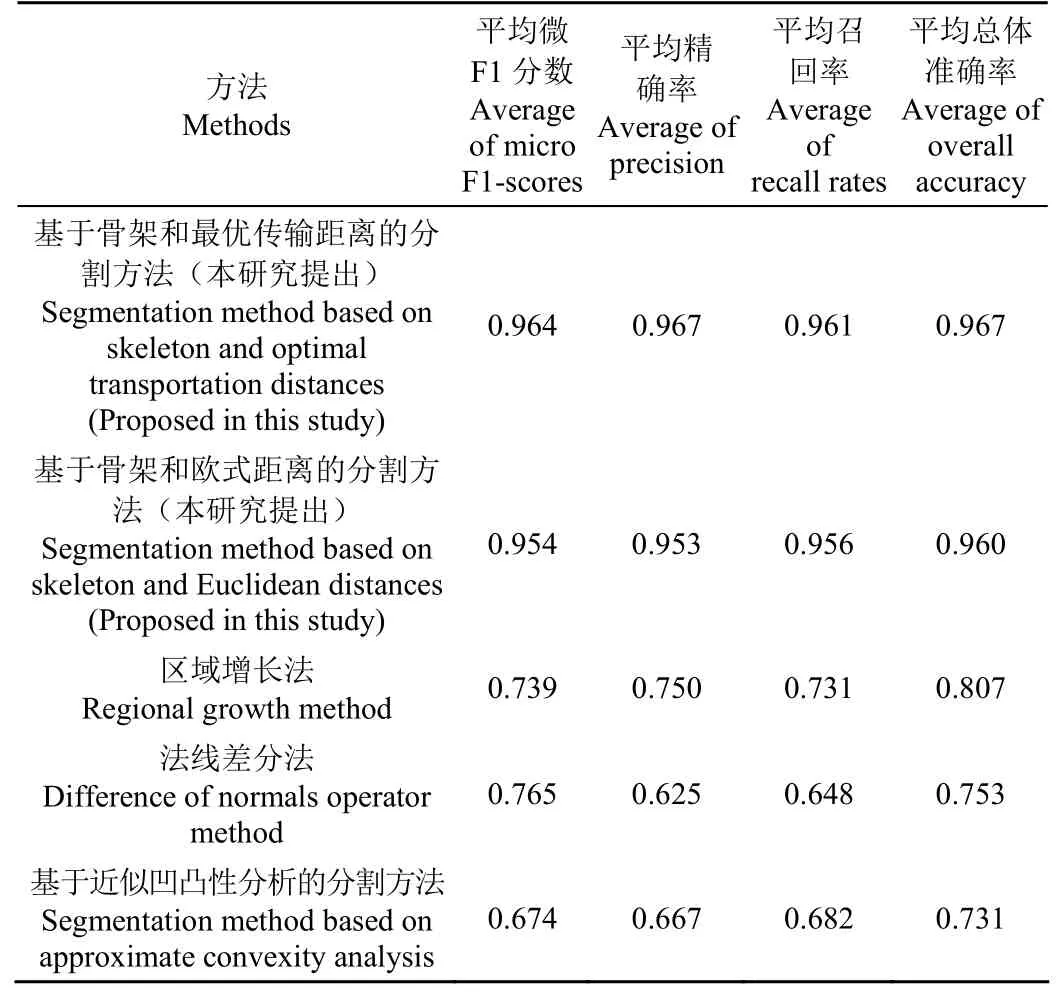
表2 5种方法分割精度的对比Table 2 Comparison of segmentation accuracy of five methods
本研究分割结果的可视化示例图如图10所示,分别给出了总体精度最高、最低,微F1分数最高、最低,叶片数量最多、最少,植株高度最高、最低的可视化效果,从可视化结果也可以看出,本研究分割的结果与真实值非常相近。
一些点云茎叶分割算法在去除茎点云之后,采用基于欧式距离的聚类方法[39]或基于密度的空间聚类方法[25]进行叶片分割。测试了本研究提出的基于骨架和最优传输距离的茎叶分割方法和上述2种聚类方法对新叶的分割效果。测试时,将植株的完全展开叶点云删除,只保留最上部的4片新叶点云和茎点云,以便更加清晰地对新叶分割结果进行评估。由于2种聚类方法不能分割茎,因此在测试时删除茎点云,只对叶片进行分割;但运行基于骨架和最优传输距离的茎叶分割方法时,则保留茎点云。3种方法对新叶分割精度的对比如表3所示,基于骨架和最优传输距离的茎叶分割方法对新叶点云的分割能力要优于其他2种聚类方法,其平均微F1分数、平均精确率、平均召回率和平均总体准确率达到0.956、0.957、0.957和0.964。由3种方法对新叶分割结果的可视化图可知,与手动分割的真实值相比(图11a),本研究提出的基于骨架和最优传输距离的茎叶分割方法较好地分割出了4个新叶(图11b),而基于欧式距离的聚类方法(图 11c)和基于密度的空间聚类方法(图11d)均将最外侧的2个叶片误分割成同一个叶片,这是由于2个叶片的叶基部点云紧密相连导致的。
2.2 表型参数提取
各表型参数提取值与人工实测值的对比如图12所示,对比结果表明,株高提取值和实测值之间具有较强的相关性,决定系数R2和均方根误差RMSE分别为0.99和1.71 cm;冠幅的R2和RMSE分别为0.99和3.44 cm;茎高的R2和RMSE分别为0.96和7.07 cm;茎粗的R2和RMSE分别为0.97和0.41 cm;叶宽的R2和RMSE分别为0.93和0.85 cm;叶长的R2和RMSE分别为0.96和5.28 cm。
株高和冠幅2个表型参数的提取结果与人工实测值非常接近,反映出本研究构建的植株坐标系适合用来表示植物的形态结构。
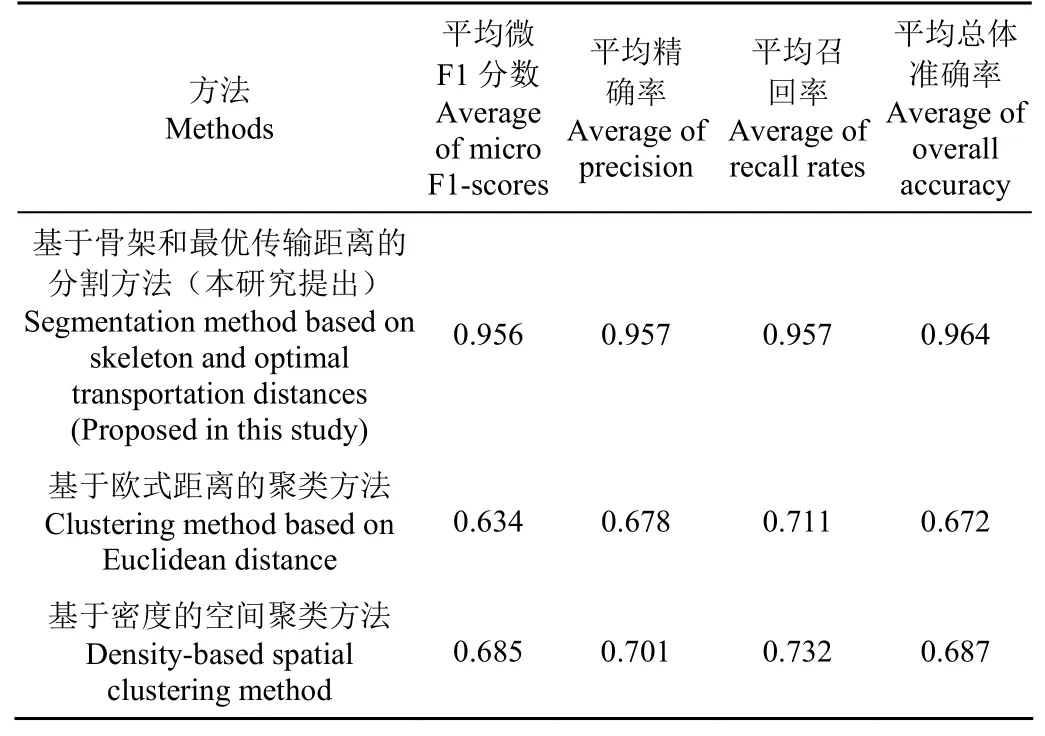
表3 3种方法新叶分割精度的对比Table 3 Comparison of new leaf segmentation accuracy of three methods
叶宽参数的误差主要由下述2个因素造成:1)如果叶宽路径的2个端点未沿叶脉对称,会导致叶宽路径与叶脉不垂直,造成提取的叶宽参数偏大;2)本研究使用叶片中部的点云提取叶宽,但某些叶片最宽的区域并不在叶片中部,导致提取的叶宽参数偏小。
叶长的误差是由于提取的叶长路径与叶脉不重合导致的。下述3个因素会导致该问题:1)如果叶片的叶尖区域下垂严重,其第一主成分轴的端点就不会落在叶尖区域,导致叶长路径中缺失叶尖部分的叶脉点云;2)本研究方法对部分叶片的叶领区域分割精度低,导致叶长路径中缺失叶领点;3)如果茎叶分割算法将茎上的点误分割为叶片点云,则叶长路径中会包含茎点云。前2个因素会导致提取的叶长参数偏低,而第3个因素会使提取的叶长参数偏大。
茎高的误差来自于新叶叶基与茎连接区域点云的误分割。茎粗的误差主要来自以下2个因素:1)本研究以茎点云到茎中轴距离的中值作为茎半径,这种计算方法将茎的横截面看作是圆,但一些玉米植株的茎横截面更接近椭圆,导致茎粗的提取值偏低;2)如果茎叶分割算法将完全展开叶的叶领点云误分割为茎点云,会导致茎粗提取值偏高。
总体上看,虽然提取的表型参数存在高估或低估,但与手工测量值具有非常高的相关性,因此一定程度上也验证了本研究表型参数提取方法的稳定性和实用性。
3 结 论
本研究提出了基于点云骨架和最优传输距离的玉米茎叶自动分割方法。该方法先通过植株点云骨架的提取和分解实现对器官位置、类别的识别,再采用基于最优传输距离的精细分割算法实现对茎叶器官的精确分割,最后利用分割出的茎叶点云自动提取株高、冠幅、茎高、茎粗、叶长和叶宽6种表型参数。通过分析试验结果,得出以下结论:
1)本研究可以对苗期、拔节期玉米植株进行精准的茎叶分割,平均精确率、召回率、微F1分数和总体精准度分别为0.967、0.961、0.964和0.967,高于区域增长法、法线差分法和基于近似凹凸性分析的分割方法。
2)本研究对新生叶的分割效果较好,平均微F1分数、平均精确率、平均召回率和平均总体精度为0.956、0.957、0.957和0.964,高于基于欧式距离的聚类方法和基于密度的空间聚类方法。
3)本研究可自动提取6个表型参数,株高参数的决定系数R2(Coefficient of determination)和均方根误差(Root Mean Square Error,RMSE)分别为0.99和1.71 cm;冠幅的R2和RMSE分别为0.99和3.44 cm;茎高的R2和RMSE分别为0.96和7.07 cm;茎粗的R2和RMSE分别为0.97和0.41 cm;叶宽的R2和RMSE分别为0.93和0.85 cm;叶长的R2和RMSE分别为0.96和5.28 cm。
本研究为玉米表型高通量测量、玉米植株三维重建提供了一种有效技术手段。下一步将研究对长有雄穗、果穗的玉米植株点云进行分割,以实现对玉米全生育期表型信息的自动提取。