用角加速度测量物体转动惯量的实验方法
2021-05-07黎孟珠
黎孟珠
(广西师范大学 职业技术师范学院,广西壮族自治区 桂林 541004)
转动惯量是工程应用中重要的物理参数之一,在大学物理课实验中也测量该参数[1-4]。在航天领域,转动惯量影响飞行器的姿态、飞行稳定性等。在航空领域,飞机活动舵面的转动惯量可为载荷、操稳特性、气动弹性、颤振等专业提供重要依据。提高转动惯量测量精度的数学模型、电子仿真方法研究也受到国内各类基金的资助。角加速度法是笔者4年前研究发动机功率测量精度时突发奇想而推导出的一种新方法[5,6]。虽然该方法的新思路已在北京航天计量测试技术研究所、中国运载火箭技术研究院的最新专利中看到了碎片式应用[7-9],但他们的零碎成果受到传统测量方法的理论束缚而难以实现。
1 航空航天行业检测转动惯量精度
北京航天计量测试技术研究所王小三等人研究了“美国Space Electronics.GB系列产品说明”“美国航空航天管理局Langley研究中心。飞行系统测试与集成”“加拿大航天署实验室、环境测试与进展”“美国航空航天管理局Goddard宇航中心、质量特性测量”等国外转动惯量测试装置现状,给出现有的转惯量测量方法按测量准确度从高到低排列次为:扭摆法、落体法、三线摆法、复摆法、单线扭摆法和质量线法[9]。基于所有绕定轴转动或做平面运动的刚体的运动定律均与转动惯量紧密相关,关于转动惯量测量的研究是航空、航天强国的研究热点、重点问题,他们2019年提出了正弦扭摆法[8,9]的新方法,同时给出了现有部分转惯量测量仪器的测量精度表。虽然该资料未给出详细的理论推导过程,但所呈现的成果是:该方法在扭摆法的加载过程中施以正弦载荷,可实现用线性叠加原理(JT=J2-J1),使测量精度从0.5%提高到0.05%。但仔细研究该成果的原理:线性叠加(JT=J2-J1)是难以实现的。因为该方法实施的正弦载荷不是常数载荷,无法得到恒定的角加速度β(α),故测量过程中不能有效利用角加速度这一物理参数。2015年王小三等人申请的发明专利[10]所用的无差放大较准原理借助于标准件分测量范围遂段校正测量的办法,未给出具体的理论依据,理论上应该存在测量精度与测量量程方向相反的现象。
现有部分转动惯量测量仪器的测量精度表见表1[9]。
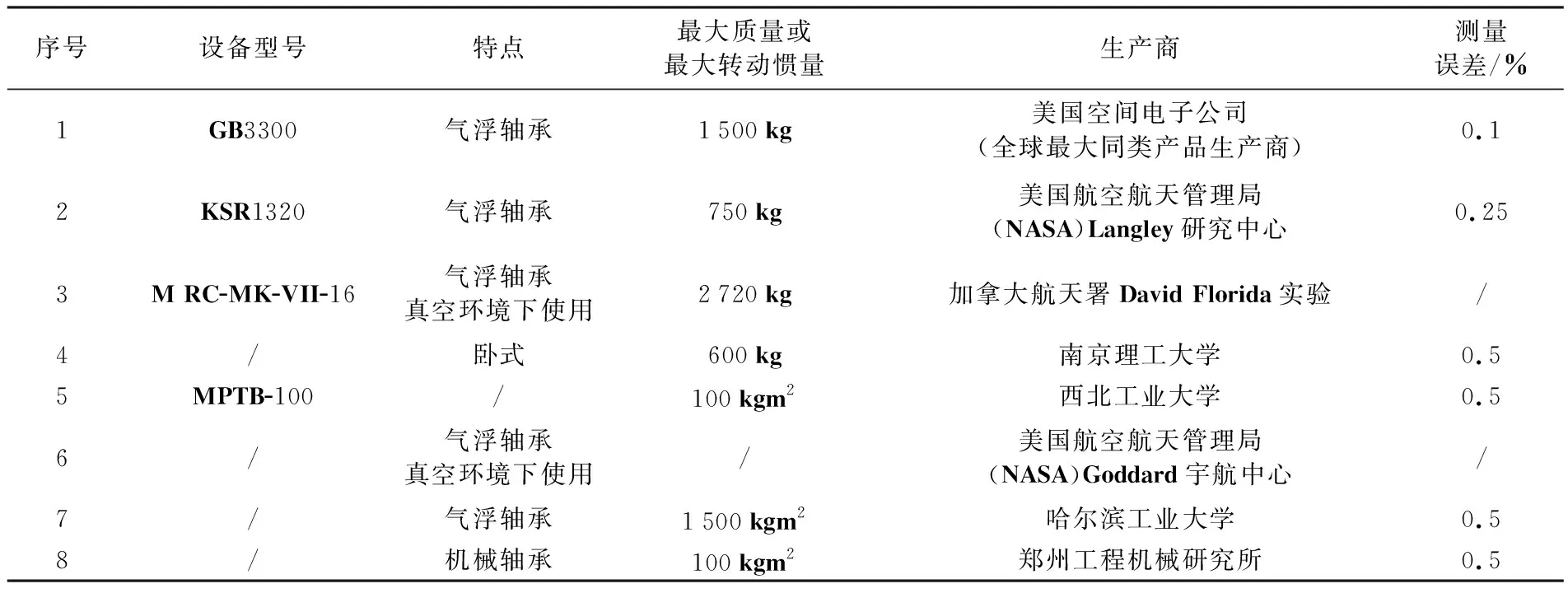
表1 部分转动惯量测量仪器的测量精度表
2018年北京卫星环境工程研究所杜晨等人申请的发明专利基于球面气浮轴承的多参数质量特性测试台[11]使用传统理论公式:
2 国家基金支持转动惯量检测方法
南京林业大学顾洲实施的国家自然科学基金面上项目、江苏省高等学校自然科学研究面上项目[15]研究了机械转动惯量电模拟技术及在汽车传动系统试验台和风力机动态特性模拟领域中应用的技术特征。湖南理工大学程望斌实施的国家自然科学基金面上项目、国家级大学生创新创业训练计划项目、湖南省大学生研究性学习和创新性实验计划项目、湖南省科技计划项目[16]设计了一套刚体转动惯量测量系统,研究了刚体转动惯量测量系统的功能模块和实现过程,分析了系统软件的实现过程。中国汽车工程研究院股份有限公司吴俊刚实施的国家国际科技合作专项项目[17]改进了已有的驾驶室质心位置和转动惯量分离的方法,提出了解决驾驶室测量时空间错位的问题。广州汽车集团廖美颖实施的国家自然科学基金项目[18]用悬吊法测试分析了汽车发动机的惯性参数。天津大学精密测试技术及仪器国家重点实验室王向军实施的国家自然科学基金项目[19]搭建了复摆式的转动惯量测量装置,对结构进行了校验和优化。给出误差补偿方法以及综合测量质心和转动惯量的方案。哈尔滨工业大学吴爱国实施的国家自然科学基金重大项目、深圳市学科布局项目、国家自然科学基金项目、深圳市基础研究项目、广东省自然科学基金项目、国家自然科学基金优秀青年科学基金项目[20]采用Lyapunov方法证明了在存在转动惯量不确定性时,所设计的滑模姿态控制律能使闭环航天器姿态系统稳定。这些基金支持项目都对转动惯量的测量方法、测量精度、目标控制等贡献了有益的研究成果,但未脱离传统理论的束缚。
3 角加速度法测量转动惯量的数学公式
发明专利《用角加速度参数优化发动机转矩测量误差的方法》与《用转动惯量参数修正发动机转矩测量误差的方法》中提出了应用角加速度测量物体转动惯量的新方法,利用可实现线性叠加原理测量转动惯量所需的基础公式:
Ttq(t)=J1β1=(J1+J2)β2=(J1+J2+J3)β3.
设待测物体的转动惯量J1;试选一级惯性标准码J2≈J1;标定二级惯性标准码J3。
标定误差公式:

4 角加速度法测量转动惯量的标定方法
选用二级惯性标准码J3=J1+J2,可以进一步确定测量最大误差。根据测量对象需求选定测量误差阈值,利用二级惯性飞轮和一级惯性飞轮两者的角加速度的相互关系,判断的转动惯量测定误差是否的在误差阈值范围内;如果一级惯性标准码的角加速度与二级惯性标准码角加速度的2倍的差值的绝对值小于等于误差阈值:|β2-2β3|≤ε,满足要求;如果一级惯性标准码的角加速度与二级惯性标准码角加速度的2倍的差值大于误差阈值:|β2-2β3|>ε,则给二级惯性标准码增大一个测试单位,再测量二级惯性飞轮的角加速度;如果一级惯性标准码的角加速度与二级惯性标准码角加速度的2倍的差值小于负误差阈值:β2-2β3<-ε,则给二级惯性飞轮减小一个测试单位,再测量二级惯性飞轮的角加速度,直至满足工况需求为止。
5 结 语
目前大学实验室用传统方法测量转动惯量误差控制在5%之内[3]。军工技术大学的专利产品测量转动惯量误差控制在0.5%。美国空间电子公司使用气浮轴承生产的GB3300测量转动惯量误差控制于0.1%。北京航天计量测试技术研究所王小三等人尝试的新方法预计测量转动惯量误差为0.05%。而本文提出的角加速度法测量转动惯量可以根据工况的需求任意设定精度。