基于分层策略的智能下肢假肢运动意图识别
2021-05-07夏安琦何清旋王可林
夏安琦,何清旋,王可林
(安庆师范大学 数理学院,安徽 安庆 246133)
0 引 言
智能动力下肢假肢在残疾人生活中发挥着越来越重要的作用。[1]它的控制系统分为高层控制器、中层控制器以及底层控制器。整个控制系统的关键是高层控制器,主要用来接收输入信号,并根据意图识别算法识别人的运动意图。[2]近年来,智能下肢假肢的运动意图识别研究正在火热进行。随着科学技术的进步,人民生活水平的提高,可穿戴设备在运动康复工程中得到了迅速发展与广泛应用。[3]通过可穿戴的传感器采集下肢运动的机械信号或肌电信号等进行分析,可对不同的运动模式进行分类,从而识别出残疾人的运动意图。由于机械信号具有稳定性好、不易被干扰等优点,本文使用机械信号传感器采集数据进行意图识别。
基于机械信号的意图识别研究中,Young等[4]分析了窗口大小对算法性能的影响,对平地行走、上楼、下楼、上坡和下坡5种稳态模式以及5种稳态模式之间的8种转换模式的识别率可达到93.9%。Chen等[5]提出一种新的参数优化策略,针对每个相位分别优化分类器、特征集和窗口大小,对6种稳态模式的识别率为94.6%。Xu等[6]提出了一个多层次实时车载系统来识别连续运动模式。设计了一种级联分类策略,对站立、平地行走、上楼、下楼、上坡、下坡6种稳态模式以及10种转换模式的识别率为93.2%。Stolyarov等[7]提出了一种利用集成惯性测量单元(Inertial Measurement Units, IMUs)估计腿部关节平移运动来预测即将到来的步行任务的新方法,对平地行走等5种稳态运动模式进行识别,平均识别率为94.1%。Zhang等[8]提出了一种鲁棒的下肢假肢环境特征识别系统,通过预测截肢者的运动模式和估计下肢假肢的环境特征来辅助假肢的控制。将深度传感器和惯性测量单元相结合,实现了环境点云的稳定。对5种稳态运动模式,识别率为94.9%。Su等[9]分析健侧早期摆动阶段的IMUs数据,并将数据输入卷积神经网络,用自选择特征来预测运动意图,将信号传递给假肢来控制其执行相应运动模式。对13种运动模式(包含5种稳态模式与8种转换模式)的平均识别率为94.2%。Gong等[10]提取统计特征,用人工神经网络对站立、平地行走、上楼、下楼、上坡以及下坡6种稳态模式成功识别,识别率达到98.4%。
上述意图识别方法研究通过采集机械运动信号,对不同模式进行直接分类,从而控制假肢。目前,国内外相关研究大多数都为单层直接分类。但若在同一地形下持续稳定的行走,则运动模式是保持不变的,若地形改变,则运动模式会是两种模式之间的瞬时转换,与前者具有本质差异。因此,若直接对所有模式进行特征提取与分类,会导致不同模式间的混淆较大,需要加大对模式的类内相似性与类间差异性的利用。基于此,本文对5种稳态模式与8种转换模式合成的13种运动模式,提出分层策略方法,利用稳态模式与转换模式的类间差异性,提出帧间相减方法,获取具有类间差异性的数据集,对样本进行第一步分类。在第一步的基础上分别对两大类模式进行再分类,从而完成下肢假肢的运动意图识别。
1 运动模式的介绍
人体下肢运动具有周期性,由多个步态周期组成。[11]以模式是否转变为依据,可将步态分为稳态步与转换步。以双脚与地面是否接触为依据,可将一个步态周期划分为两个阶段:支撑相(占60%)与摆动相(占40%)。传统运动意图识别方法将传感器内嵌于智能假肢,因此转换步定义在患侧。本文将传感器绑定在健侧,通过识别健侧的运动状态,映射出患侧的运动意图。鉴于此,使用文献[12]的模式定义采集健侧摆动相前期数据预测运动意图。
人体运动的基本模式一般包括平地行走、上楼、下楼、上坡以及下坡5种稳态模式。由于上楼到下楼的突然转换是不可能出现的,中间必然包含过渡阶段。因此,5种模式之间的转换主要包括以下8种:平地行走到上楼,平地行走到下楼,平地行走到上坡,平地行走到下坡,上楼向平地行走,下楼到平地行走,上坡到平地行走,下坡到平地行走。由此,共组成13种运动模式(如表1)。

表1 本文13种运动模式
2 基于分层策略的意图识别
稳态模式是人体运动最频繁的基础运动模式,特点是具有周期性与规律性[13],因此前后步态同频变化。从数据表现上看,以平地行走模式与上楼模式的小腿传感器单轴加速度为例,前一步态与后一步态数据变化同步(图1、图2)。转换模式为两个稳态模式间的过渡模式,过渡期可看做数据的突变过程,转换步与前一步态不同频变化。以走到上楼与上楼到走模式小腿传感器单轴加速度为例,前一步态与后一步态数据变化不同步(图3),与稳态模式相对应的阶段呈现出不同的运动姿态与数据表现。
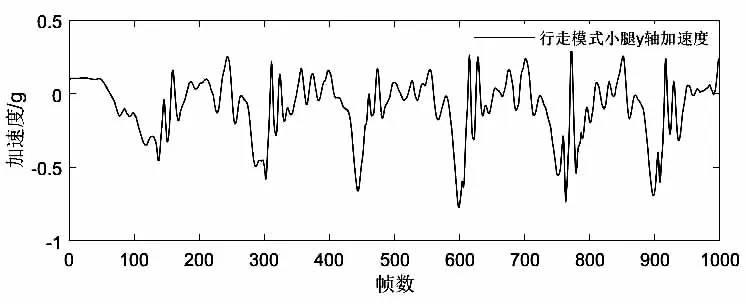
图1 稳态模式前后步态小腿的单轴加速度示例(行走)
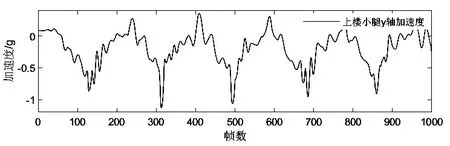
图2 稳态模式前后步态小腿的单轴加速度示例(上楼)
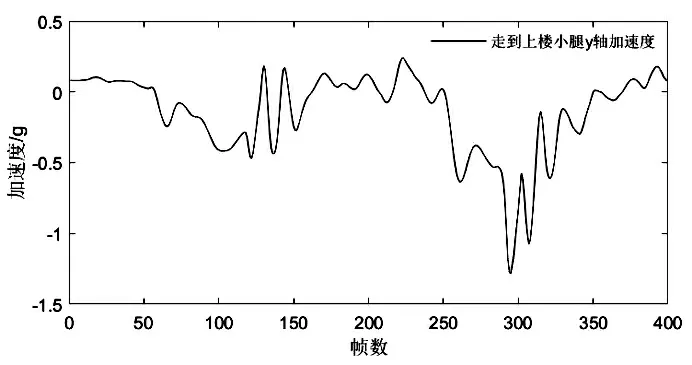
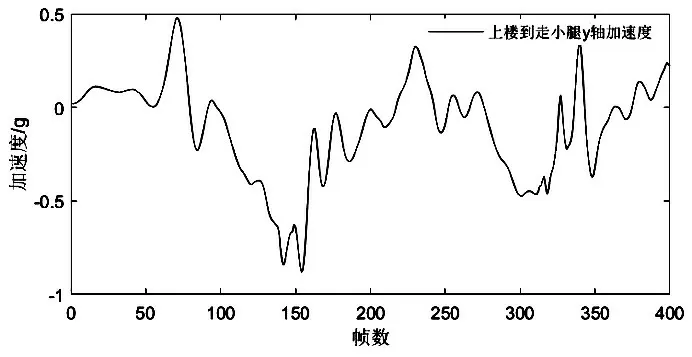
(a)走到上楼模式加速度 (b)上楼到走模式加速度
针对稳态模式与转换模式数据的差异性,提出帧间相减的数据获取方法,提取转换模式中转换步的摆动相前期以及前一步态相同长度的数据,对应帧的数据相减,得到新的转换模式数据集。对于稳态模式,亦用后一步态减去前一步态对应帧数据。最终所得数据集部分如图4所示,稳态模式(图中以行走模式为例)数据拟合后走势较稳定,转换模式(图中以走到上楼模式为例)数据拟合后波动幅度较大,两类差异明显,因此可作为后期分类的依据。
利用类间差异性,将帧间相减之后所得的新的数据集用于第一层对于稳态模式与转换模式的分类。稳态模式的数据平稳且趋于零,转换模式的数据不为零且有波动,以此为依据对稳态模式与转换模式进行二分类。
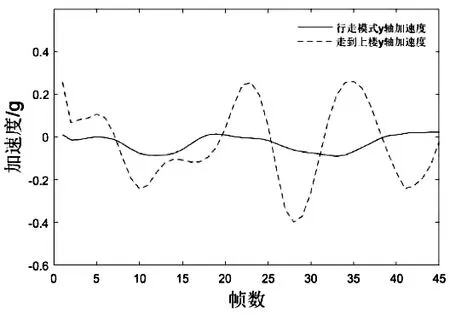
图4 稳态与转换模式处理后的数据对比示例
在第一层分类的结果中,识别为稳态模式的样本包含大部分稳态样本与少量识别错误的转换样本,因此对这些样本重新训练的模型更具有针对性。将其训练再细分类为13种模式。对识别为转换模式的样本同样操作。相比于直接对识别为稳态的样本分5类,对识别为转换的样本分8类,既可保持模型的稳定性,又可对第一步识别错误的样本提供补偿机制,增大重新识别正确的概率,从而提升整体的识别效果。实验阶段将两种情况作为对比实验验证了改进的效果。
在整体策略中,传统方法将传感器内嵌于患侧,相应转换步定义在患侧,根据患侧在运动模式转换后产生的数据判断患者的运动意图,存在一定的滞后性。另外集成在假肢上的生物力学信号反映了假肢的运动信息,不能反映穿戴者本身的运动意图,在意图识别中存在着局限性。因此,本文将三个IMUs放在患者的健侧大腿、小腿与脚踝处采集数据,通过云计算,在患侧的运动模式转换之前进行智能下肢假肢的运动意图识别。
在云计算过程中涉及信号输入、数据预处理、特征选择、分类模型训练、信号输出过程。从分类模型角度出发,多从分类器上进行改进,但在针对数据集进行分层策略上未有考虑。为使智能下肢假肢帮助患者正常生活,训练的模型需要具备对一般地形及其转换的地形具有普适性。稳态模式是始终在同一地形下保持相同运动状态的运动模式,转换模式是由一个地形下初始运动状态转换为另一地形下不同运动状态过程中的过渡模式。就地形、步态、运动状态而言,稳态模式与转换模式具有本质差别,两者的数据形态亦不同。因此,本文为利用稳态模式与转换模式的类间差异性,提出分层策略,首先第一层对稳态模式与转换模式二分类,第二层对第一层的结果进行再分类,流程如图5所示。

图5 本文意图识别方法
3 实验结果与分析
3.1 实验设备与方案
实验共有10名健康受试者(Healthy Volunteers, HV),基本信息如表2,包括5男5女,年龄为18-30岁,身高是1.55m-1.83m,体重40kg-83kg。受试者模拟残疾人的13种运动模式,模拟患侧为左侧,健侧为右侧,每种运动模式执行10遍,共计1300个样本。

表2 受试者信息
本文使用健侧(右侧)大腿、小腿、脚踝处3个IMUs(如图6)分别测得摆动相前期45帧(一个步态周期约为120-190帧,一个摆动相的范围约为45-70帧)三轴加速度与三轴角速度数据用于研究。每个IMU由一个三轴加速度计和一个三轴陀螺仪构成,采样频率为96Hz,每一帧的数据包含位移,速度,四元数,加速度,角速度与两脚触地状态序列。实验场景包括一个坡度为10°,长度为6m的斜坡、八节踏步高度为16cm的楼梯以及足够大的平地。计算机实验环境为Matlab2018b,分类器为SVM。验证方法为K折交叉验证 (K-fold Cross Validation, K-CV)评估,K取5。

图6 实验设备与环境
3.2 实验结果及分析
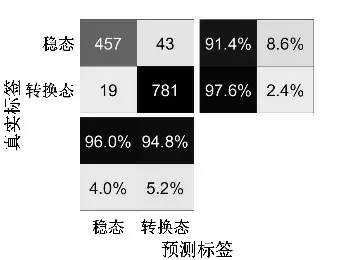
第一层分类的平均识别率为95.2%,如图7,转换模式相比于稳态模式的分类效果更明显。
第二层分类中,对所有预测标签为稳态模式的样本,使用分类器训练模型进行分类,采用十次五折交叉验证法所得的平均识别率为96.2%。由图8的混淆矩阵可见,无走到上楼与走到上坡模式的标签。表示第一层分类中走到上楼、走到上坡与上楼到走模式的识别率为100%,无分错情况。观察图中样本数量分布(正对角线数据为正确分类的数量),综合右侧真实标签的正确率与错误率,可知模型对稳态模式识别效果较好,每个模式的识别率均高于97.5%。对第一层中识别错误的转换样本也有一定的矫正作用,如对7个走到下坡转换模式样本,可正确分类4个。
第二层分类中,对所有预测标签为转换模式的样本再分类,平均识别率为95.1%,混淆矩阵如图9。观察可见,对每个转换模式的识别率均不低于96.9%,其中上楼到走模式的识别率可达到100%。对于第一层中识别错误的相对较大数量的稳态模式样本依然具有较明显的矫正功能,能够重新识别正确的约为半数,其中19个下坡模式样本中有10个正确分类。
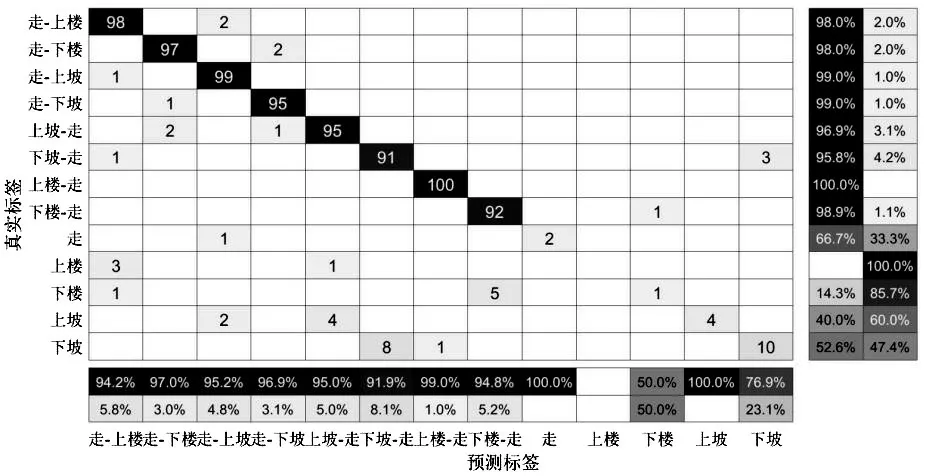
对所有样本的平均识别结果为95.5%。如图10所示,对每种模式都能基本分类,其中上楼到走全部准确识别,错误识别的样本分布也较为分散。由于姿态相似性,仍有少量模式之间容易混淆。如下坡到走与下坡,下坡到走的识别率为91%,有7%的样本错误识别为下坡。下坡的识别率为89%,有8%错误识别为下坡到走。
设置对比实验:在第一层分类方法与所有环境完全相同的情况下,第二层实验中对识别为稳态的样本分为5类,对识别为转换的样本分为8类。结果对比如表3,对比实验中第一层识别错误的样本将继续识别错误,无识别正确的可能,导致最终识别率低于第一层的识别率。本文方法在第二阶段对第一层的错误样本有一定的矫正功能,所以最终识别率相对第一层有所提升。

表3 对比实验与本文实验的结果对比
4 总结与展望
利用类间差异性,提出对数据集进行分层处理。第一层先将模式分为两大类,提出帧间相减的方法处理数据,利用稳态模式与转换模式的差异性进行分类。第二层按照第一层预测标签的分类结果将样本分为两部分,分别训练并识别。识别效果较好,且对第一层结果提供补偿机制,矫正了部分识别错误的样本。本文方法能基本避免稳态模式与转换模式之间的混淆,从而提升识别效果,验证了分层策略的可行性与有效性,为智能下肢假肢的运动意图识别研究提供新的研究思路。在所有样本的识别结果中,依然存在少许稳态模式与转换模式的混淆。在分层策略中,第一层的结果十分关键,因此在第一层分类时所使用的重要策略,值得进一步的探究。
