局部阴影下光伏阵列MPPT算法的研究*
2021-04-30唐小亮梁安江赵春丽
成 杰,唐小亮,梁安江,赵春丽
上海发电设备成套设计研究院有限责任公司,上海 200240)
0 引 言
光伏阵列受环境温度和光照强度影响较大,实现最大功率点跟踪(MPPT)可以有效提高光伏发电系统的效率[1]。理想情况下,光伏发电系统的P-U特性曲线呈现单峰值状态,扰动观察法(P&O)和电导增量法(INC)等经典的MPPT算法可以实现最大功率点(MPP)的追踪[2]。但是当光伏阵列被局部遮挡时,P-U特性曲线呈现多峰值状态,这些经典的算法极易陷入局部最大值,造成能量的损失[3-4]。
随着光伏电站容量的增加,多峰值状态下全局最大功率点跟踪(GMPPT)算法的研究得到了越来越多的重视。文献[5]提出了改进型扰动观察法,该方法能够有效地追踪单峰值最大功率点,但是追踪多峰值时极易陷入局部极值。文献[6-7]在改进的P&O方法上提出了改进的全局扫描法,该方法有效解决了陷入局部极值的问题,但是又出现稳态功率振荡大的问题。文献[8-10]提出了一种改进型的粒子群算法(PSO),该方法能够有效地追踪到全局最大功率点,追踪精度高,但收敛不稳定,并且追踪速度较慢。文献[11]利用光伏阵列MPP处电流与短路电流之间的近似关系提出了一种三步骤搜索法,该方法有效地提高了运算速度,但是受比例关系影响较大,容易形成误判[12]。
针对上述分析,本文提出了一种基于搜索-计算-判断(SCD)的算法来实现GMPPT。该方法使用改进型扰动观察法从Uoc处反向寻找第一个局部MPP,通过计算与判断,不断减小搜索区域,间接地将多峰值问题简化为单峰值搜索,从而解决误判问题。通过建立与PSO及P&O等算法的对比仿真,并搭建试验平台进行验证,可以得出SCD算法在有、无阴影状态下均能实现GMPPT,能够有效提高光伏系统的发电效率。
1 光伏阵列建模与输出特性分析
1.1 光伏电池的数学模型
光伏电池在建模的时候,需要从精确度和运算速度2方面进行考虑。本文选择的光伏电池等效电路如图1所示[13]。

图1 光伏电池等效电路模型
结合图1,可以推出光伏电池的数学模型为
Ipv=Iph-Id-Ish
(1)
(2)
(3)
因此,将式(2)、式(3)代入到式(1)可以得到:
(4)
Ud=Upv+IpvRs
(5)
式中:Ipv、Upv为光伏电池输出的电流和电压;Iph为光生电流;Id为二极管处的电流;Ish为等效并联电阻处的电流;I0为二极管反向饱和电流;Rsh、Rs分别为等效后串、并联电阻;Ud为并联支路电压;q为电子电荷常数;n为二极管品质因子;k为玻尔兹曼常数;T为外界环境温度。
光伏阵列通常为多个电池串并联构成,将串并联的数量分别记为Ns和Np,则式(4)、式(5)变为
Im_pv=Np×Ipv
(6)
(7)
式中:Im_pv、Um_d分别为多电池串并联后输出电流和并联支路电压。
1.2 光伏阵列的输出特性
假设光伏阵列串并联电池模块个数均为4,结构如图2所示。为了保护系统组件并提高整体输出功率,光伏模块均反并联旁路二极管;为了避免产生环流,并联支路均串联阻塞二极管[14]。
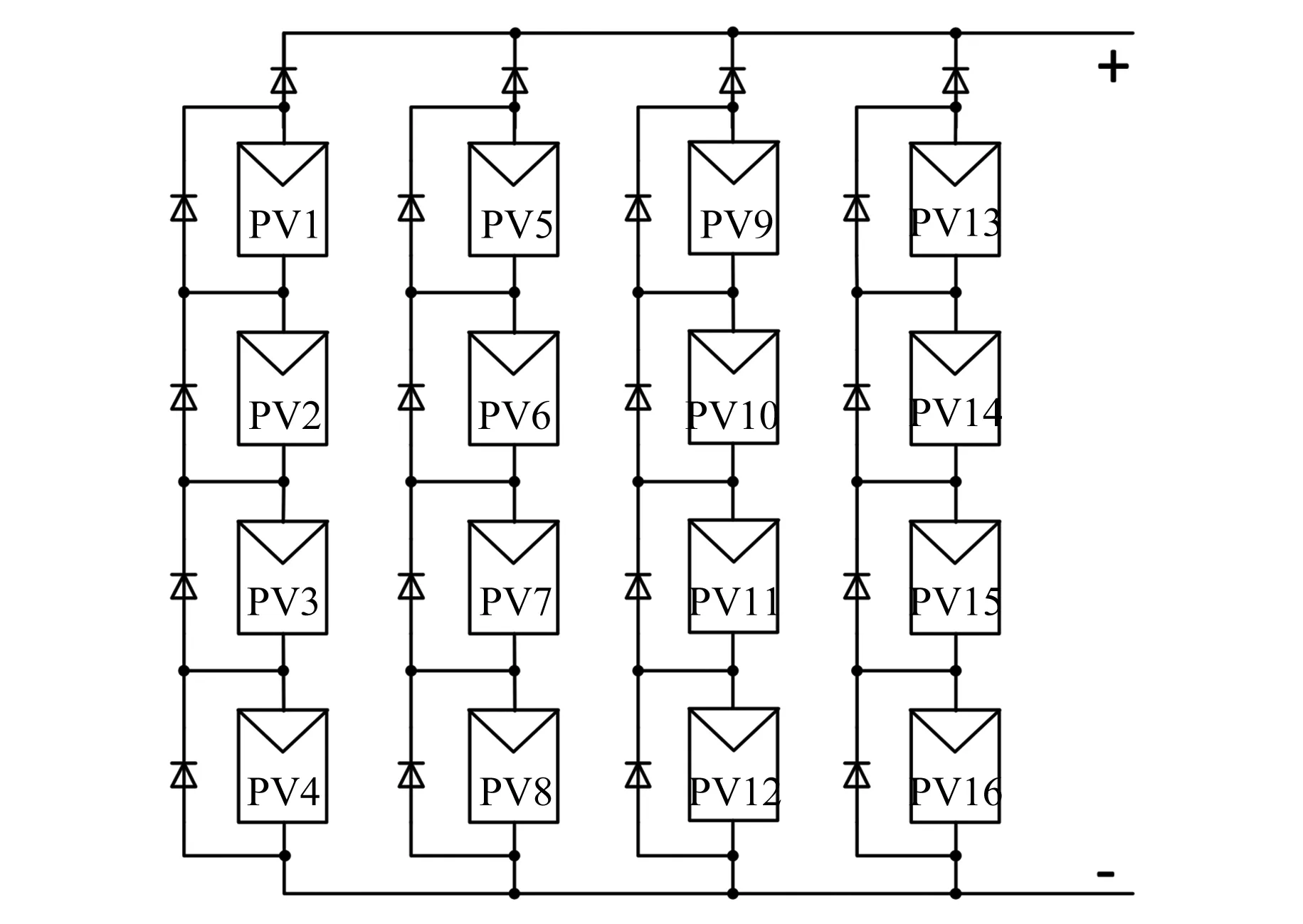
图2 光伏阵列结构
为了不失一般性,本文选用1STH-215-P型号的光伏电池分析,该电池的参数如表1所示。
假设外界环境保持在25 ℃,单个PV板为最小辐照单元。通过改变PV板的光照强度来构建光伏阵列的3种阴影状况模型。
(1) 阴影状况模型1。所有PV板光照强度均为1 000 W/m2。

表1 光伏电池参数
(2) 阴影状况模型2。PV1~PV4光照强度为100 W/m2,PV5~PV7光照强度为200 W/m2,PV9~PV10光照强度为500 W/m2,PV13光照强度为600 W/m2,其余PV板光照强度为1 000 W/m2。
(3) 阴影状况模型3。PV1~PV3光照强度为100 W/m2,PV5~PV7光照强度为500 W/m2,其余PV板光照强度为1 000 W/m2。
3种环境下的P-U特性曲线和I-U特性曲线如图3所示。从图3可以得出,当光照强度不均匀时,P-U曲线会出现多峰值;电流I与电压U成反比关系。模型1为单峰值状况,最大功率约为3 382.93 W,通过参数计算功率应该为3 410.40 W,功率损失约为0.8%;模型2为四峰值状况,最大功率约为1 293.77 W;模型3为三峰值状况,最大功率约为1 801.16 W。

图3 不同状态下的光伏特性仿真曲线
2 PV全局最大功率跟踪算法
2.1 改进型扰动观察法
传统的扰动观察法,当正向施加扰动时,其原理为[15]
(8)
式中:U0、P0分别为上一次检测的电压和功率;U、P分别为此次检测的电压和功率;ΔU为电压扰动步长。
此方法具有控制概念简单、被测量参数少等优点,但受电压的初始值和ΔU的影响较大。由于ΔU固定,在MPP附近振荡,造成能量的损失。为了规避这种缺点,本文采用了基于逐步逼近法的扰动观察法,在保证速度的同时可以极大地提高跟踪精度。其基本思路为,以较大步长从开路电压Uoc处反向搜索,每当搜索方向发生变化时,等比例缩小搜索步长及搜索区域,再次进行搜索,每改变一次步长时,精度成倍提高[1]。
2.2 最大功率跟踪算法
本文在2.1节改进型扰动观察法的基础上,提出了一种三步式GMPPT算法,通过对P-U曲线的搜索-计算-判断实现全局最大功率的跟踪。其过程如下。
第1步,搜索。从Uoc处应用改进型扰动观察法进行MPP搜索,搜索到第一个(下一个)峰值点时停止,记为(Umi,Pmi)。
第2步,计算。Uref不断反向减小,寻找拐点。当dP/dU>0时,更新拐点电压Usci,根据Pmi/Usci,求出下一个判断点(次点)Ni的电流INi。
第3步,判断。判断Ni点处dPNi/dUNi是否大于0,若大于0则回到第1步,否则回到第2步,当Uref小于Uend时结束,得到最大功率。
SCD算法的具体操作流程如图4所示。

图4 SCD算法流程图
为了更具体地介绍此算法的实现流程,下面将结合1.2节中模型2的P-U特性曲线进行具体介绍,其实现过程如图5所示。
进行第一个峰值点搜索。从Uoc处应用改进型扰动观察法进行搜索,寻找第一个极值点M1(Um1,Pm1),此时最大功率Pm=Pm1,通过式(9)求出Uend。然后,进入计算环节。不断反向减小电压,当dP/dU>0时,找到第一个拐点A(UA,PA),根据式(10)求出次点B(UB,PB):
Uend=Umin=Um1/N
(9)
式中:Uend为结束搜索点处电压;Umin为相邻极值点间最小电压差;Um1为开路电压附近的极值点电压;N为旁路二极管的个数。
第i个次点处的电流INi为
INi=Pmi/Usc
(10)
式中:Pmi为第i个极值点处的功率;Usc为拐点处电压。
由前文结论可知,从B点到A点,电流单调递减,电压单调递增,因为在区间[UB,UA]上,Umax=UA、Imax=IB,所以此区间所有的功率均小于Pm1=UA×IB。因此,可以从M1点直接跨到B点,省去中间部分的搜索。之后进行判断,若dP/dU>0,则说明B点处于功率上升处,需要进一步搜索,寻找M2点。若dP/dU≤0,则说明B点处于M2点上或者是M2左侧功率的下降沿,则可以直接忽略M2点,从B点开始计算寻找下一个拐点。重复上面的过程,直至完成全局搜索。
本例中B点位于M2点的右侧,因此需要进行搜索寻找M2(Um2,Pm2),此时Pm=max{Pm1,Pm2}。
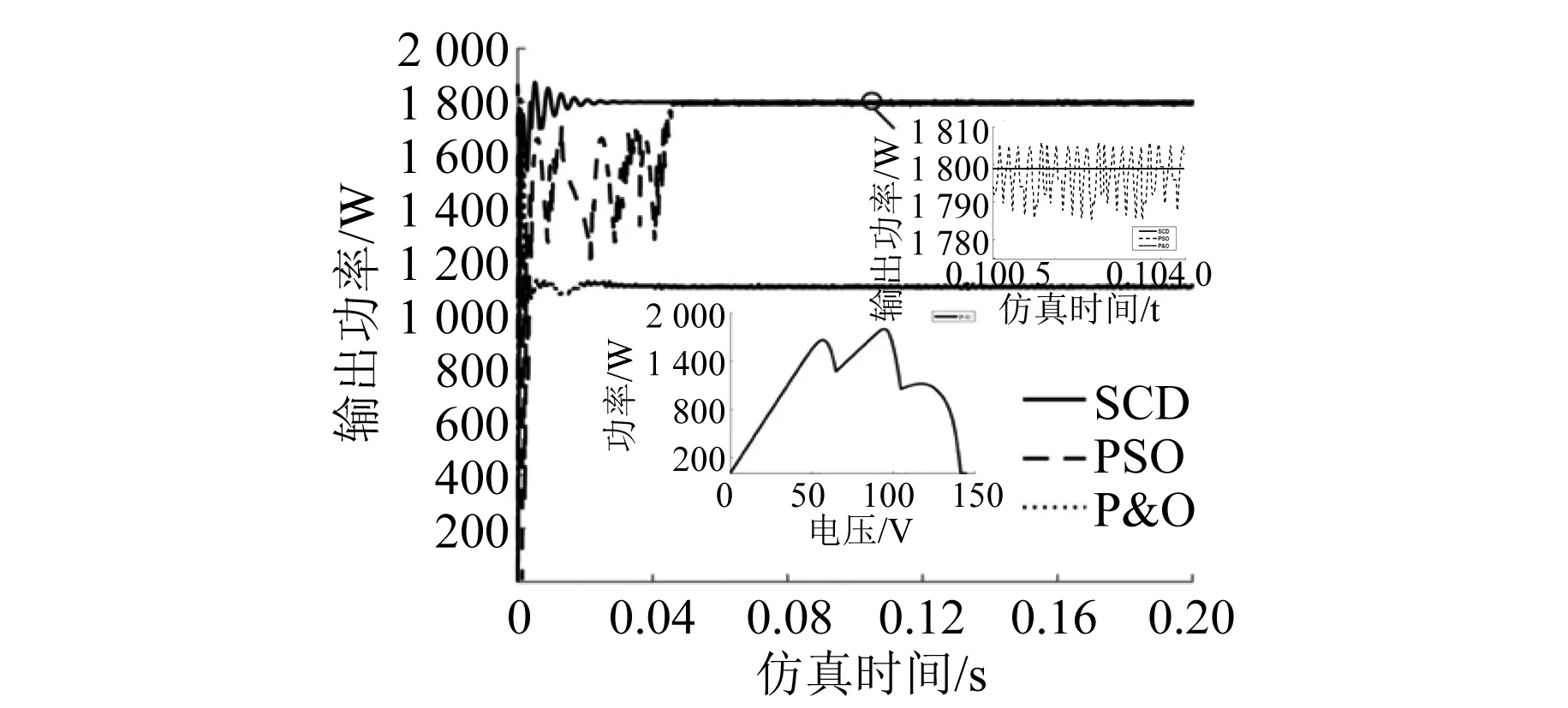
然后在M2点重复上述过程,寻找到拐点C(UC,PC),通过式(10)找到次点D(UD,PD),此时点M3(Um3,Pm3)在D点右侧,忽略不计,从M2点直接跨越到D点。在D点继续计算,当Uref 因此本次追踪的轨迹为Uoc-B-M2-D-Uend。可以看出SCD算法的应用将一个三峰值问题转换成为单峰值搜索,通过计算的方式不断缩小搜索区域,在避免误判的基础上提高了搜索速度。此外,此算法在应用过程中无需增加外围电路,并且运算程序简单、易实现。 图5 SCD算法示例图 为了验证SCD算法的有效性,选取STH-215-P光伏组件进行本次仿真试验。光伏阵列结构为4×4,电池参数如表1所示,环境温度保持25 ℃,光照强度如上文3种阴影模型所述,采用Boost电路作为主电路。通过与粒子群算法和扰动观察法进行仿真对比,其中PSO算法的参数设置为:个体学习因子c1=全局学习因子c2=1.2;最大迭代次数为60;惯性权重w=[0.15,0.85];速度v=[-1,1]。其具体仿真情况及结果如下所示。 图6为单峰值最大功率跟踪对比仿真结果。从图6可以得出,使用SCD跟踪算法在0.026 s左右跟踪到峰值,输出结果大约为3 382 W,几乎为恒值输出,跟踪精度为99.97%。 图6 单峰值全局跟踪过程 使用PSO算法在0.043 s附近追踪到峰值,峰值在3 365.1~3 383.0 W之间上下波动,跟踪平均精度约为99.74%。使用P&O算法大约在0.025 s追踪到峰值,跟踪精度为99.2%。由此可以得出,单峰值情况下,3种方法均能快速追踪到最大值,SCD算法追踪时间短、追踪精度最高,P&O算法追踪精度最差。 图7为三峰值最大功率跟踪对比仿真结果。从图7可以得出,P&O算法在局部峰值处上下振荡,输出功率范围为1 097.22~1 120.1 W,追踪精度仅为61.55%,功率损失非常大。SCD算法最终功率输出大约为1 799 W,且上下波动极小,追踪精度为99.88%。PSO算法输出功率稳定在1 785.3~1 805.9W,追踪精度约为99.69%。SCD算法的追踪时间约为0.024 s,小于PSO算法的0.045 s。 图7 三峰值全局跟踪过程 图8为四峰值最大功率跟踪对比仿真结果。其仿真情况与三峰值基本相似,SCD算法、PSO算法和P&O算法输出功率分别为1 293.7 W、1 271.6~1 302.2 W、1 043.4~1 011.04 W,实现MPPT的时间分别为0.021、0.046、0.014 s。 图8 四峰值全局跟踪过程 从上述3种情况的仿真结果可以看出,SCD算法具有最高的跟踪精度和较快的跟踪速度,并且随着峰值个数的增加,能够更快地跟踪到全局最大峰值;PSO算法的跟踪精度较好,但是跟踪时间相对较长,并且随着峰值个数的增加,追踪的时间在不断增加;P&O算法单峰值情况跟踪效果良好,但是在多峰值情况下会陷入局部峰值,不能实现全局MPP跟踪。 为了验证SCD算法的可行性,搭建试验平台如图9所示,试验选取的光伏电池板型号为XKD200,此型号在标准状况(环境温度为25 ℃,光照强度为1 000 W/m2)的开路电压为41.5 V,最大功率点处电压为36 V,光伏阵列结构为4×1。 图9 MPPT验证试验平台 在阳光充分照射的情况下,用白板对部分PV板进行遮挡。由于MPP处电压电流等参数一定,试验时仅测量了电压变化曲线,所得的试验跟踪的电压波形如图10所示。从图10可以看出,应用SCD算法能够快速判断出阴影的状况,26 ms左右完成跟踪,最终将电压稳定在17.7 V附近。试验数据表明,该算法在实际应用中可行有效,满足了预期的设想,在有阴影的状况下,系统能够快速地实现全局最大功率点的跟踪,并且输出电压比较稳定。 图10 电压跟踪过程波形 本文通过对光伏电池的数学模型进行分析,建立4×4光伏阵列模型。基于此模型和改进的扰动观察法,提出了GMPP跟踪的SCD算法。通过与现有的PSO和P&O算法在3种不同的工况下进行对比仿真,结合试验验证,可以得出以下结论: (1) 本文提出的算法在单峰值(无阴影)和多峰值(有阴影)状态下均能快速稳定地跟踪到最大功率点。 (2) 本文提出的算法与传统的PSO和P&O算法对比分析表明,在全局最大功率跟踪的过程中,此算法跟踪精度高、跟踪速度快。
3 仿真对比分析
3.1 无阴影情况下仿真对比分析

3.2 多峰值情况下仿真对比分析

4 试验验证与分析


5 结 语
