多自由度电机的发展及关键技术综述*
2021-04-30邢璇璇刘力博王雪婷
李 争, 邢璇璇, 刘力博, 王雪婷
河北科技大学 电气工程学院,河北 石家庄 050018)
0 引 言
随着工业与制造业的高速发展,稳定性与精度成为当前研究的热点问题[1-2]。机器人、汽车、医疗器械、工业生产、航空航天等领域的驱动系统通常需要做复杂的多维运动。传统的驱动系统是采用多台单自由度电机通过动能传递的方式来实现多维的驱动控制,一方面系统的体积较大,成本较高,复杂的机械传动装置增加了系统的转动惯量,带来了额外的机械摩擦,降低了效率同时增加了齿轮装置的损耗;另一方面由于齿轮间隙的存在,使系统传动精度和定位精度的误差不可避免。多自由度电机在减小体积、降低成本的同时满足各种复杂的驱动控制,简化了机械系统结构,提高了系统的精度。
多自由度电机就是由单个电机来实现空间的多维运动,可以避免由多个单自由度电机组合采用的复杂连接装置[3],使得电机在体积和重量上大幅度减小,并在控制精度和效率上均有明显的提高,使得多自由度电机越来越受国内外研究者的热捧。本文简要介绍了多自由度电机的基本原理及技术特点,叙述了国内外多自由度电机的发展水平,基于多自由度电机对结构创新、位置检测技术和运动控制策略进行了归纳与总结,探寻了多自由度电机的当前应用及未来的发展趋势。
1 多自由度电机的发展及研究现状
当前,多自由度电机的研究热点是永磁式多自由度电机、多自由度超声电机、感应式多自由度电机以及磁阻型多自由度电机[4],在结构上各有特点,适用于不同场合的应用。
1.1 永磁多自由度电机
永磁多自由度电机的转子上镶嵌有永磁体,具有结构简单、运行可靠等特点。早在20世纪50年代,苏联学者就提出了多自由度永磁电机,并在球形电机的电磁数学模型基础上建立了相应的理论模型。近年来,永磁多自由度电机得到了快速发展。
2018年,文献[5]基于永磁三自由度电机进行了优化,提出了永磁无槽球面三自由度电机。该电机结构如图1所示,由内外2个转子组成,通过转子输出轴相连接来完成共同运动,不仅可以减少电机的内部损耗,而且有利于提高电机的精度。为了使电机进行多自由度运动,电机定子和电机转子通过球型轴承来连接。此外,定子绕组的内部由2部分组成:(1)集中线圈;(2)倾斜的集中线圈。电机进行多自由度运动时,电机的转子及轴承与电机一起完成同步转动。
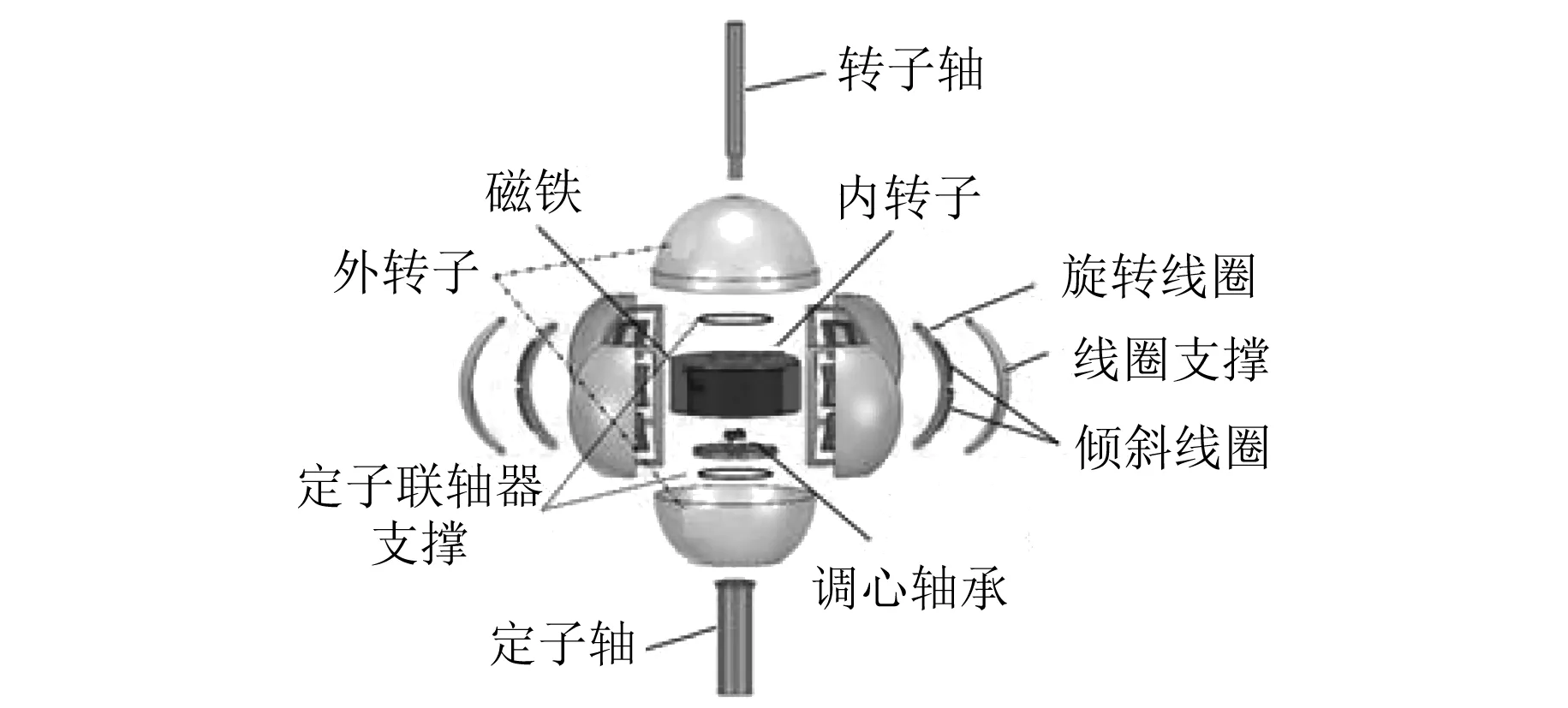
图1 永磁无槽球面三自由度电机
同年,日本学者Hatta等[6]提出了一种基于交叉耦合结构的内置式永磁二自由度电机,电机结构如图2所示。与传统二自由度电机相比,定子由内绕组和外绕组2种绕组组成,2种绕组正交排列。该电机结构不仅提高了推力,还改善了转矩。

图2 内置式永磁二自由度电机

图3 分层式永磁球型电机
2019年,哈尔滨工业大学Gan等[7]在内部定转子的结构上进一步优化后提出了分层式永磁球形电机,电机结构如图3所示。该电机内部沿着轴向分布着3个并联定子和一个球型转子,其中3个并联定子是由一个设置在转子赤道位置的旋转定子和分布赤道两侧的倾斜定子组成,电机做旋转运动是由转子上交替磁化方向的永磁体与旋转定子之间的电磁力来完成的。这种新型永磁电机结构可有效地减小电机内部定转子分布间距,大大提高电机的气隙磁密和输出转矩。
2020年,何竞雄[8]提出了一种台阶式磁极永磁球形电机,结构如图4所示。将转子磁极升级为台阶,不仅可以优化电机的电磁特性,还有助于加强对电机的控制,提升电机的性能,使其符合更加高的需求,为电机永磁体结构的改进奠定了良好的基础。

图4 台阶式磁极永磁球形电机
1.2 多自由度超声电机
压电材料的发展推动了超声多自由度电机的快速发展。国外学者对多自由度超声电机的研究较早。文献[9]提出四定子二自由度超声电机,2个圆形定子的行波用于转子定子轴旋转。1998年Amano等[10]提出柱状多自由度超声电机,该电机采用单定子驱动,其轴向尺寸较大,降低了电机工作效率。针对效率低的问题,赵淳生等[11]对此结构进行了优化设计。20世纪初期,Aoyagi等[12]开始对多自由度超声电机进行研究,利用薄板的3种弯曲振型的两两组合实现了三自由度驱动。
2015年,Yan等[13]提出了一种对称式多自由度超声电机,结构如图5所示。该电机由4个对称的振动器构成,其中前盖和振动器之间用柔性结构进行连接,该设计有利于减小耦合效应对振动器的影响。通过试验得出,在通入400 V电压时,电机转子的最高速度可达到7.32 r/min。

图5 对称式多自由度超声电机
2016年,Yang等[14]在夹层式纵弯混合激励的基础上,提出了一种由混合模态激励的夹心式多自由度超声电机,电机的结构如图6所示。该电机的优势在于仅使用4块压电陶瓷片即可实现转子的多自由度运动,并且在空间上产生第一纵向振动模式和2个正交的第二弯曲振动模式。所有压电元件均被激励产生一个自由度的运动。混合模态激励的夹心式多自由度超声电机不仅结构简单,而且电机的装配工作比之前的单振动器多自由度电机要更加方便快捷。
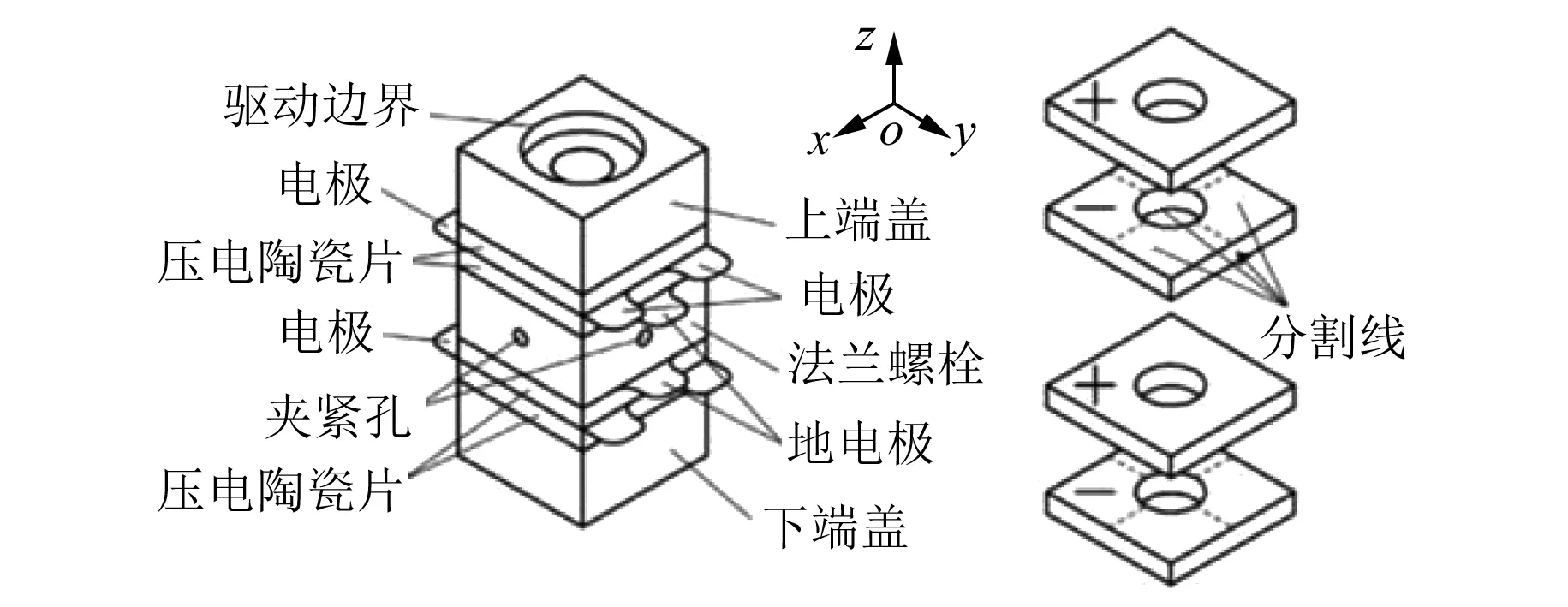
图6 夹心式多自由度超声电机

图7 球形定子多自由度超声电机
2020年,Huang等[15]提出了一种采用面内非轴对称模式的新型球形定子多自由度超声电机,其结构如图7所示。定子由压电材料组成,转子由金属材料构成,该结构有利于减小电机的体积,且实现电机在多方位对称的状态。电机转子的驱动脚上产生多种椭圆运动,并且速度快,在小型多自由度的机器上有极高的应用价值。
2020年,立陶宛考纳斯理工大学Jūrēnas等[16]提出了双压电环三维超声电机,其结构如图8所示。该设计源于磁球式转子和2个相对放置的环形压电致动器结合形成一个整合体,不仅增加了冲击力,而且允许球体以更高的扭矩旋转,促进了电机的稳定运行。随着压电材料的发展,超声电机在多自由度电机的占比越来越高,成为研究的热点之一。

图8 双压电环三维超声电机
1.3 感应多自由度电机
感应多自由度电机,是通过电磁转矩来推动电机进行多自由度运动。Williams等[17]首次提出了变速球形感应电动机的概念,在进行了一些试验的基础上,开发了一种二自由度球形感应电机,其结构如图9所示[18]。

图9 二自由度球形感应电机
20世纪初,比利时鲁汶大学学者Dehez等[19]对多自由度电机进行研究,提出了两自由度球形感应电机,其中转子分为2层,内层与外层之间用导磁材料连接,以提高气隙的磁密度。波兰西莱西亚科技大学的Wu等[20]设计了一种具有各向异性转子结构的球形感应电机,其主要设计基于磁各向异性原理,对磁场和磁力进行了分析。
2016年,文献[21-22]提出一种壳状球形感应多自由度电机,其结构如图10所示[23]。采用多目标/多约束进化算法对壳状球形电机进行优化,建立并验证了壳状球形感应电机的电磁和热分析模型。

图10 壳状多自由度感应电机
2018年,中国科学院宁波材料技术与工程研究所Zhang等[24]提出一种磁悬浮球形感应电机,结构如图11所示。电机的转子是多层金属空心球,定子是绕转子形成3个圈的圆形绕组。当加载交流电时,每个圆可产生一个轴转矩。磁悬浮不仅可以消除定子与转子间的机械摩擦而且使转子动量球更加稳定可靠。

图11 磁悬浮球型感应电机
2019年,重庆交通大学邓涛等[25]提出一种多自由度感应电机。该电机的工作原理是通过弧面定子来对转子的旋转方向进行驱动,从而实现电机多自由度运动的目的。同年,浙江大学Zhou等[26]提出了一种新型无输出轴多自由度球形感应电机。该球形感应电机的结构主要由最外层的转子球壳、4个弯曲的直线感应电机定子、铝合金制成的金属支架、一些靶心轮轴承以及为电源和控制模块等其他模块预留的内部空间组成,结构如图12所示。电机可以直接在外表面产生任意方向的输出扭矩,实现电机转子的多自由度旋转运动,提升了电机的灵活性。
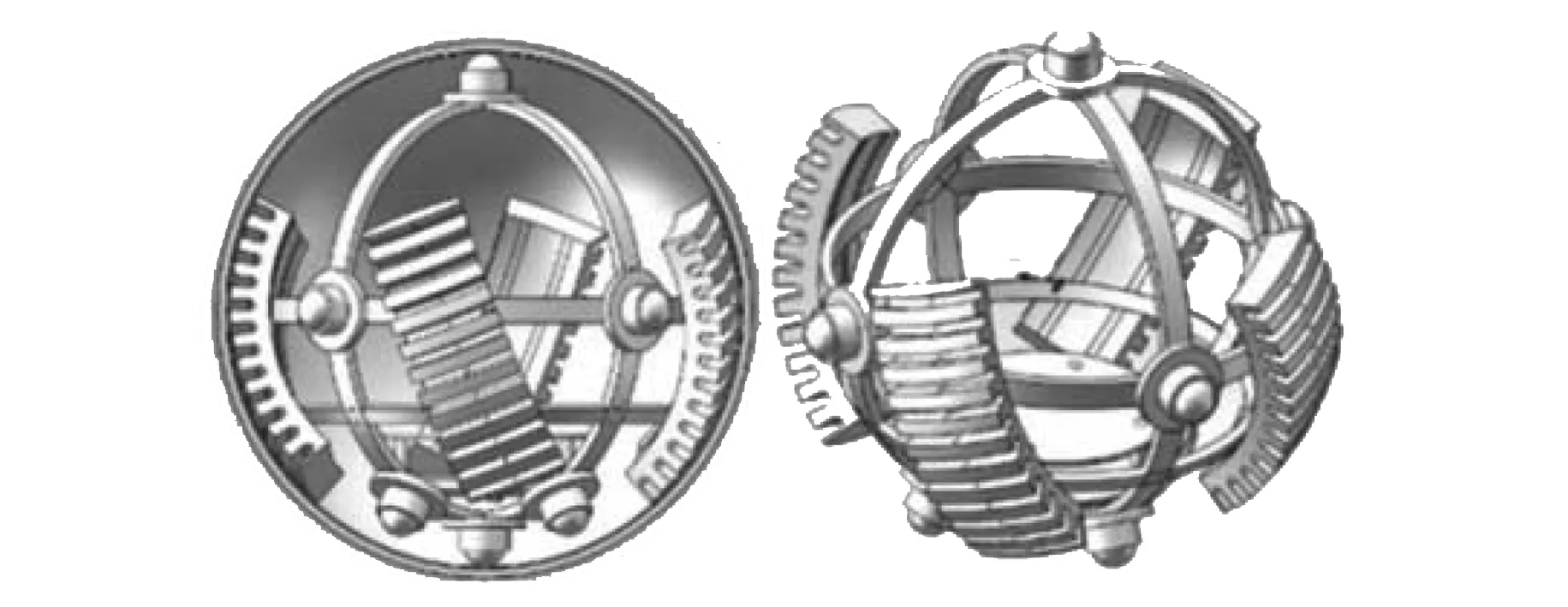
图12 新型无输出轴多自由度球形感应电机
2020年,文献[27]提出了一种二自由度直接驱动感应电机,结构如图13所示,该电机通过2个独立动力源进行控制,能够实现直线、旋转及螺旋运动。通过试验验证了螺旋运动中耦合效应的存在,运用斜槽法来削弱电机在螺旋运动中产生的耦合效应,且输出扭矩和输出力上均有所提高。

图13 二自由度直接驱动感应电机
1.4 磁阻型多自由度电机
磁阻型多自由度电机基于磁阻最小原则来对电机进行设计,为多自由度电机的进一步发展提供了方向。国内在开关磁阻电机方面起步较晚,但国内学者对此也进行了深入研究。
2018年,安徽大学Tao等[28]设计了磁阻型多自由度电机,电机模型如图14所示。其工作原理与开关磁阻电机的工作原理基本一致。该球型磁阻电机基于最小磁阻原理设计,并且电机的定子和转子都采用凸极叠层结构,有效地提高了电机效率[28-29],且该磁阻球型电机具有制造简单、易于定位和控制、成本低等优势,在发展成熟后适合大规模生产及应用。

图14 磁阻型多自由度电机
2020年,王群京等[30]在此基础上进行了优化,提出了一种凸极式磁阻型球形电机,其结构如图15所示。该电机的工作原理是根据不同的通电策略,使电机完成多自由度旋转。凸极式磁阻多自由度电机的优势在于减少了漏磁,增加了输出转矩,在缩小电机体积的同时提升了电机的动态性能。

图15 凸极式磁阻型多自由度电机
2 多自由度电机系统关键技术分析
多自由度电机的快速发展,离不开技术上的支持,其技术上主要包含电机结构创新[31-32]、位置检测技术和运动控制策略[33-36]等。随着科研人员的深入研究和科研条件的大力支持,技术上的难题逐渐有了新的突破。
2.1 电机结构创新
2.1.1 新型支撑结构
多自由度电机内部的支撑结构作为电机转子进行多自由度运动的重要组成部分,之前一直由滚珠轴承等构成,导致定转子之间产生摩擦,影响电机的精度,限制了多自由度电机的发展,阻碍了其技术上的创新与进步。为此,文献[37]提出了一种液质悬浮多自由度电机,该多自由度电机采用液压轴承结构,其定子和转子之间可以添加具有润滑作用的流体,润滑流体可以完成对转子的支撑。为了满足多自由度电机应用的不同需求,需要在不同条件下选择更加合适的流体。液压轴承不仅具有良好的润滑作用,并且减少了电机运行时定子转子发生共振的可能性。文献[38]提出一种气浮多自由度电机,将高精度机床所采用的气体润滑轴承应用于永磁多自由度电机上[39],该电机转子可以实现空间范围内的多自由度运动,其优势在于定子与转子之间没有相应机械接触,可以基本上达到没有内部摩擦,将精度提升了一个级别。文献[40]提出一种应用于感应电机的磁悬浮轴承,该轴承完成了定子与转子之间的无接触运动,减小了摩擦损耗和噪声等对多自由度电机性能的影响。
2.1.2 复合驱动结构
电磁驱动的多自由度电机结构相对复杂,磁场不易控制。提高电机的精度存在困难,转轴的转矩输出损耗大且输出困难,电机的结构复杂、可靠性低,存在输出功率越高尺寸越大、惯性和电感增加、响应延迟的问题。压电驱动的多自由度电机摩擦损耗大,效率低,输出功率小,寿命短,稳定性较差,适合间断性的工作条件。电磁驱动与压电驱动的多自由度电机由于本身的缺陷导致无法满足多种场合的需要。2020年,河北科技大学Li等[41]基于该问题首次提出了电磁压电混合驱动的多自由度电机,其结构如图16所示。将电磁驱动与压电驱动方式结合起来,实现了混合驱动,不仅增大了电机的转矩输出范围和响应速度,在多自由度电机体积较大以及响应延迟的问题上也有改善。该技术在未来发展中应用前景广阔。

图16 电磁压电混合驱动多自由度电机
2.2 位置检测技术
位置检测技术是实现多自由度电机运动控制的必要环节。近年来,多自由度电机的快速发展推动了位置检测技术的进一步发展。随着位置检测技术日益成熟,其技术上的更新直接影响着多自由度电机的响应速度与稳定性,为此需要建立适合多自由度电机的位置检测体系,来适应多自由度电机发展的需求。
早期为代表的是Lee等[42]提出的滑轨支架式位置检测系统,该系统由2个导轨及3台光电编码器构成,其结构如图17所示。该接触式检测技术是通过导轨上编码器来收集转子在X、Y、Z3个方向的位置信号,再将3个位置信号进行叠加来获得转子的位置信息。由于接触式技术会增加摩擦,影响电机的精度,导致其一直未被推广与应用。国内由张西多等[43]所提出的被动球关节位置检测装置,通过机械解耦来得出转子位置,其装置如图18所示[44]。其中,编码器的作用是获取转子的自转位置,二轴倾角传感器的作用是获取转子的倾斜角度。虽然该技术在一定程度上得到改进,但因为接触式位置检测技术本身的缺陷,所以使其发展受限。

图17 滑轨支架式位置检测装置

图18 被动球关节检测装置
为了避开接触式位置检测技术的缺点,研究者开始将目光投向非接触式位置检测技术。近年来,随着霍尔传感器的发展与成熟,使其广泛地应用于多自由度电机的位置检测中[45-49]。
文献[50]在此基础上进行优化,将其运用到多自由度电机中,提出了基于三维霍尔传感器的位置检测技术。该技术原理是通过转轴上的检测点来获得自转位置,附近的点来检测转子其他2个自由度的对应位置,然后求解出转子的三维空间位置,其检测结构如图19所示。该技术在保证电机精度的前提下,简化了结构,节省了成本,使其在日后的应用中具有较大的优势。
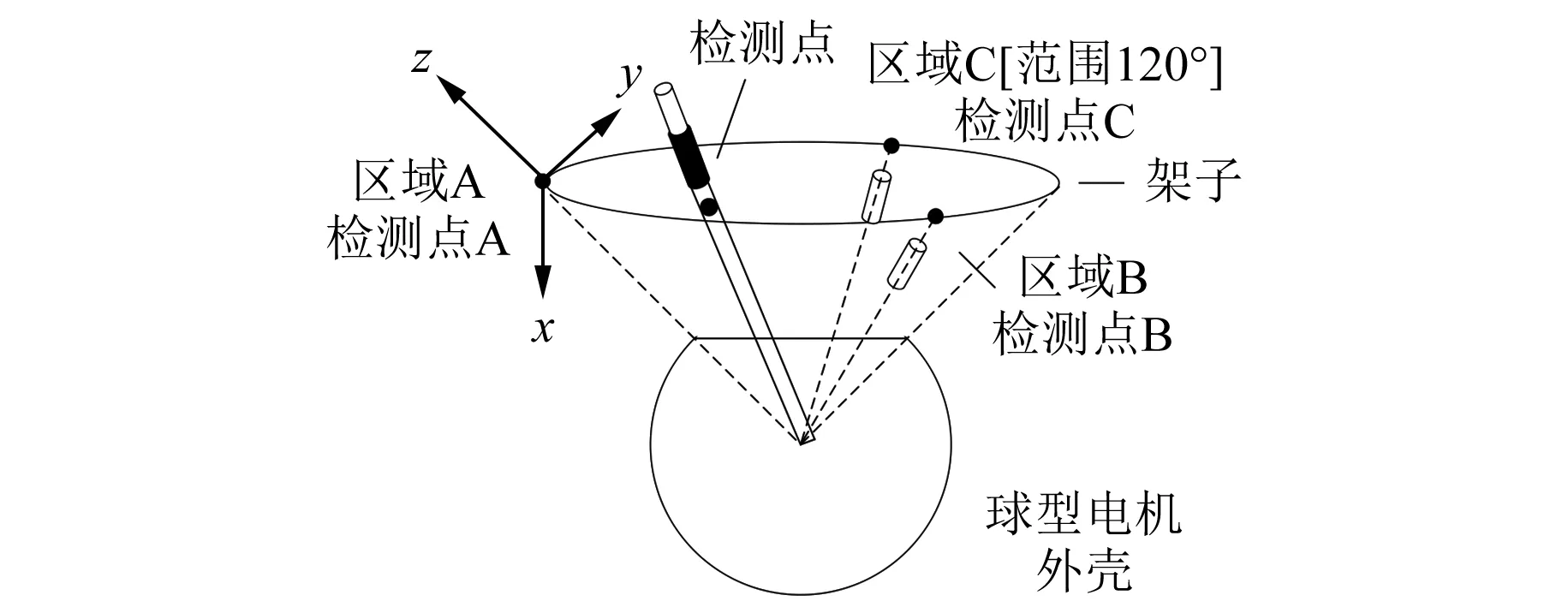
图19 三维霍尔效应位置检测
华中科技大学Bai等[51]提出反电动势法位置检测技术,对永磁球形电机的多自由度运动进行位置检测,其检测结构如图20所示。该技术只需测量电磁体两端的电压,就可以同时求解出转子的欧拉角和角速度,不需要在转子上再安装额外的传感器或夹具,在一定程度上简化了位置检测的结构。

图20 反电动势法位置检测
2020年,安徽大学文彦[52]为了降低转矩计算的复杂度,在此基础上提出了一种多任务高斯过程方法来计算永磁同步电机的输出转矩,该方法应用广义过程建立了永磁同步电机转子位置与输出转矩的关系。测试平台如图21所示[53],采用微机电陀螺传感器测量电机转子起动时的运动动力学。该传感器不仅集成了三轴陀螺仪和三轴加速度计,而且镶嵌了用作控制的数字运动处理器。多任务高斯过程方法的应用不仅有助于减少计算时间,而且有利于增强永磁同步电机在精确位置控制中的作用。

图21 多任务高斯过程方法测试平台
随着电力电子器件的更新换代,位置检测技术有了更加显著的提升,未来将会更加简单与智能化,从而实现多自由度电机的自动检测和实时同步检测的目标。
2.3 运动控制策略
多自由度电机的研究往往不能与运动控制策略相分离,而运动控制策略的完善,代表着多自由度电机能够按照预定的轨迹准确运动。当前多自由度电机运动控制策略的主要研究方向为智能化控制算法。
文献[54]提到,2016年,北京航空航天大学提出了一种永磁球形执行器轨迹跟踪的鲁棒自适应迭代学习控制算法。系统控制如图22所示,该算法有效地补偿系统中出现的各种不确定性的影响。2017年,北京航空航天大学Liu等[55-56]提出了一种基于反推和滑模控制相结合的鲁棒自适应控制策略。该方案结合了2种控制方法的优势,更加有效地补偿了不确定性对结果造成的干扰,提高了控制的准确性。

图22 系统控制图
2017年,天津大学李洪凤等[57]提出了一种基于非线性干扰观测器的模糊滑模控制策略,如图23所示。非线性干扰观测器的目的是排除多自由度电机在运行过程中产生的定转子之间的摩擦和电机负载转矩对电机运动控制稳定性的影响。利用模糊滑模控制策略,进一步减少电机的抖振现象,以保证控制策略的连续性。2019年,该团队在此基础上进行优化,采用四元数代替欧拉角作为永磁动量球姿态描述量[46],多自由度电机进行大范围的运动将不再受到欧拉角奇点的限制,并且电流/位置双闭环控制方法具有更好的跟随性能,能够适应高速多自由度电机的位置检测。

图23 模糊滑模控制策略
2019年,Guo等[58-59]建立了点对点的轨迹规划方法,提出一种基于三角形(△)组合线圈的通电策略。在电机运动范围内无运动奇点,简化了计算的过程,完善了控制的策略。2020年,张宗楠等[60]提出了一种适用于多自由度电机运动的数字积分欧拉角插补算法,算法流程如图24所示。该算法建立了多自由度电机的运动学方程,求解出多自由度电机运动角度转换,通过插补的算法,来实现球形电机的运动控制。
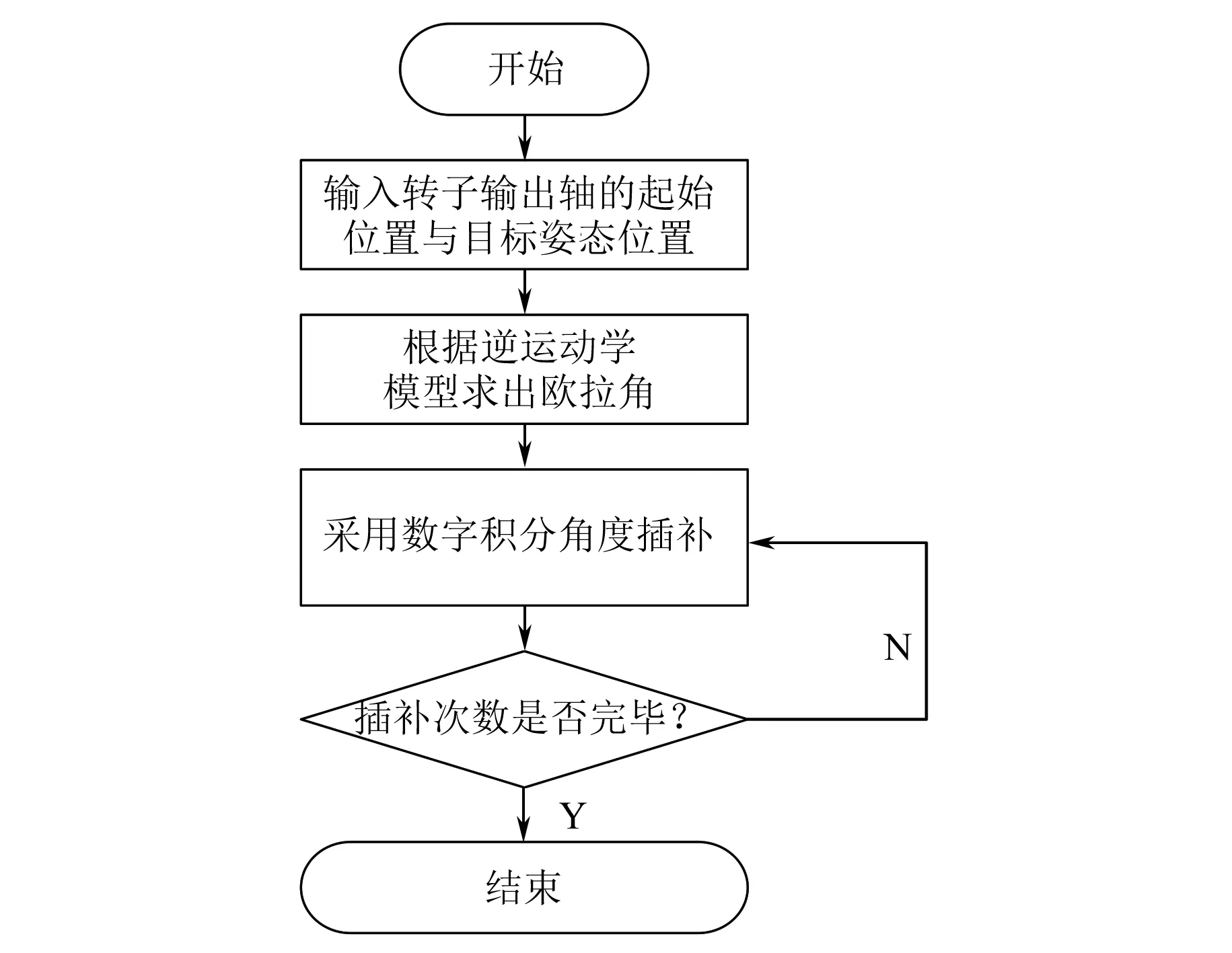
图24 数字积分欧拉角插补算法流程
由上述研究可知,这类电机控制策略均存在一定的不足。为了克服这些问题,未来可以考虑将更先进的智能算法引入到控制策略中[61-62],以实现更加复杂的运动控制,使多自由度电机满足当前制造业对高精度的需求。
3 多自由度电机的应用及发展前景
多自由度电机打破了传统单自由度电机的固有思维,扩展了电机的应用领域,且其结构丰富,可以根据不同的场合来选定多自由度电机结构及参数。 随着电机控制系统的不断完善,运动轨迹基本实现了精确控制,使得多自由度电机的应用领域日益广泛。此外,多自由度电机在航空航天、机器人仿生关节、无线充电以及未来在新能源领域的应用均具有广泛的前景[63]。
多自由度电机近年来发展迅速,在许多领域与传统的单自由度电机相比都有着巨大的优势,但是在工业生产上进行广泛应用却还存在诸多问题。为此,需要国内外学者继续努力。未来多自由度电机可以从以下方面进行优化和开发。
(1) 电机结构设计优化与创新。随着多自由度电机的提出,针对不同的机理,国内外大量科研人员经过几十年的不断努力已经取得了巨大的成果,但是仍然无法保证多维的精准快速和低损耗低成本运行。通过对电机定转子结构和放置位置的优化,可以从结构上改进多自由度电机的动态性能、尺寸大小和控制精度。同样,未来可以进行新型结构的电机模型方面的创新,在减小损耗、提高精度和提高转矩等方面进行设计和优化。这也是未来需要继续努力研究的重点之一。
(2) 建立完备的设计与分析体系。多自由度电机的蓬勃发展涌现出各种新结构电机的同时,综合多物理场的分析也是研究重点之一。电磁学、机械学、动力学和流体等物理场的综合研究是保证未来各种机理多自由度电机稳定高效运行的前提。通过多物理场仿真和计算,科研人员可以把仿真结果和试验数据进行处理,对电机提出新的结构并进行改进和优化。针对不同机理的电机,通过多物理场耦合的方法对电机运行状况进行分析。国内外学者目前使用多种物理学和数学方法对多物理场进行分析,并且通过多物理场仿真软件来设计和优化电机模型,已经成为该类电机未来发展的一种趋势。
(3) 设计稳定可靠的控制体系。在多自由度电机发展过程中,有大量的新型电机结构模型创新,该类电机控制的发展也是重中之重。实现电机控制的前提是对电机进行位置检测。在位置测量时不影响电机的准确运动,精确且快速地反馈转子位置数据,是未来研究需要突破的关键环节。目前控制方法针对不同机理的电机有所不同,但均存在成本较高、算法复杂、脉动较大等问题。与传统的单自由度电机相比,多自由度电机需要对不同方向进行精准和稳定的控制。多自由电机控制方法和策略方面的发展是当前面临的巨大挑战。
(4) 精准的加工制造工艺和新型材料的发展。虽然多自由度电机具有体积小、强度大、热形变小等特点,但未获得广泛应用的原因是加工工艺和制造材料方面不成熟。多自由度电机本身的基础结构和优化设计中均对制作材料有着苛刻要求。未来电机的发展在专注电机设计的同时,对新型材料的研究是多自由度电机发展道路上的重要助力。
4 结 语
本文总结了国内外当前多自由度电机的发展现状,介绍了几种不同机理下新型多自由度电机的结构设计及工作原理。新型多自由度电机适用于多种传动方式,代替了多台传统单自由度电机组合的工作方式,将复杂繁琐的结构变得简单,在减少空间占用率的同时,提高了效率并节约了成本。本文还对电机控制过程中的位置检测技术和运动控制策略进行了相关分析,并讨论了不同机理的多自由度电机的研究现状和未来的发展方向。虽然许多新型多自由度电机还处于试验阶段,并没有达到产品化的条件,但是多自由度电机的研究已经成为目前电机研究的前沿,拥有着广阔的应用前景。该电机终将带来新型制造业的进一步崛起。
