基于改进磁链函数的无刷直流电机低速换相策略研究*
2021-04-30文家燕罗文广
许 安, 文家燕,, 罗文广
1.广西科技大学 电气与信息工程学院,广西 柳州 545006;2.广西科技大学 广西汽车零部件与整车技术重点实验室,广西 柳州 545006)
0 引 言
无刷直流电机(BLDCM)因为其结构简单、功率密度高、易于控制而广泛应用于各个行业,且其无位置传感器控制使电机可以应用于高温、有强腐蚀气体等恶劣工况中。因此,BLDCM的无位置传感器控制备受研究人员关注。
文献[1-5]分别使用了反电动势过零法、反电动势积分法、状态观测器法、磁链估计法及高频脉冲注入检测法对转子的位置进行估计。前4种方法受电机转速的限制,低速时效果不佳;高频注入检测法仅适用于凸极电机,应用范围受限。文献[6]构建了一个与转速无关的函数,该函数称为磁链函数,通过设定一个阈值并与函数值进行比较,得出电机换相时刻。理论上该函数与速度无关,但实际上函数值会受到噪声的影响产生数值波动,尤其是在电机低速运行时。文献[7]通过一种离线标定的补偿方式减小换相误差,但误差是随机的,因此该方法在实际应用中的可靠性还需考量。文献[8]通过滑动平均滤波器来抑制噪声,但是考虑到增加窗口长度会造成严重的相位滞后,因此噪声抑制效果并不明显。文献[9]提出了一种带积分结构的磁链函数,通过对线反电动势积分,消除原磁链函数中的微分项,在一定程度上抑制了噪声,同时采用一阶低通滤波器(LPF)抑制初值误差与零漂,取得了不错的效果,但是一阶LPF只能抑制零漂,不能消除,并且该方法还需要进行相位补偿和额外的延时处理,造成了更多的计算和一定的换相误差。文献[10]取消了磁链函数中的微分项,简化了计算,在稳态时具有不错的效果,但是当电机受到干扰时会有误换相的可能。文献[11]使用一种自适应补偿的手段,提高电机高速运行时换相的准确性。文献[12]对磁链函数低速时的可靠性及高速时的精确性进行了分析与改进,虽然结果良好,但软硬件较复杂,限制了磁链函数的应用范围。
从结构上看,磁链函数非常适合用于BLDCM的低速换相策略,但函数的数值波动严重削弱了其可靠性。为此,本文在文献[9]的基础上采用带通滤波器(BPF)消除偏置误差,避免延时;同时引入一种新型换相判断机制,抑制数值波动带来的影响,保证了换相的可靠性。
1 磁链函数误差分析
1.1 磁链函数的构造和换相原理
通过文献[6]可得磁链函数(以下简称G函数)的表达式如下:
(1)
(2)

(3)
式中:hab、hbc、hca为线线反电动势;uab、ubc、uca为线电压;iab、ibc、ica为相电流之差;fab、fbc、fca为线线反电动势函数;R为相电阻;L为相电感;ke为反电动势常数;ω为转子角速度;θ为电角度。
理想的磁链函数波形如图1所示。在换相点(CP)附近函数值从正无穷跳变为负无穷,具有类似反比函数的特性,因此可以利用这一特性进行换相点检测。传统的做法是设定一个阈值,然后与G函数的绝对值进行比较,当某个时刻的函数绝对值大于阈值时即为换相时刻。理论上G函数与转速无关,再此该方法可以适用于整个转速范围。

图1 理想磁链函数与换相信号波形
1.2 磁链函数的误差分析
理想的G函数可以准确表示出换相点附近的特征,但若考虑实际工况的约束,函数会因电流、电压噪声产生巨大的数值波动,影响换相点的判断,导致换相提前甚至误换相,严重削弱了系统的鲁棒性。由文献[7]可知,G函数主要受电流噪声的影响,故本文重点讨论转速、电流噪声与G函数的关系。
以Gbc_ab(θ)为例,根据式(2)可得G函数的误差表达式:

(4)
其中,dhbc和dhab分别由式(5)、式(6)得到:

(5)

(6)
式中:Ts为采样周期。

为了使分析更贴合实际,需得到一个真实电流噪声的分布。本文通过试验测得电机相电流的波形,如图2所示。

图2 相电流示波器采样波形
通过MATLAB工具箱,计算出电流的均方根误差σ=0.005 6 A,结合该均方根误差和式(4)~式(6),得到G函数在换相点附近的3σ误差分布图,如图3所示。其中:R=1 Ω,L=0.3 mH,Ts=0.2 ms,ke=3.39 mV·r-1·min。

图3 G函数误差分布
由上述讨论可知,虽然电流噪声很小,但G函数仍会在换相点附近产生巨大的误差,并且随着电机转速的降低,误差会进一步增大。可以从以下3个方面说明该问题。
(2)G函数中含有微分项,会引入额外误差,并且该误差受采样频率的影响,采样频率越高所带来的数值波动越大;
(3) 当θ趋近换相点时,有fab→0,导致式(4)中2项系数趋于无穷大,并且该特性会强化第1点的影响,造成数值的巨大波动。
其中,第3点是G函数固有的性质;第1点和第2点是导致G函数数值波动的主要原因,单纯通过抑制噪声来减小磁链函数的误差是不够的。因为再小的噪声仍会被放至很大,所以需要从函数的结构上对其改进。
2 换相策略的改进
2.1 带积分结构的磁链函数
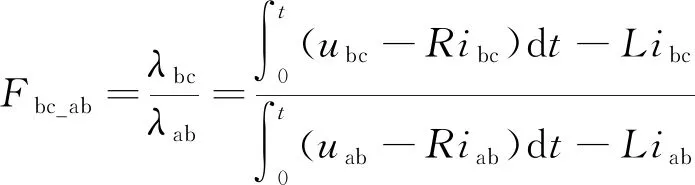
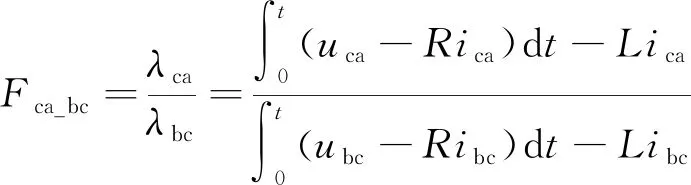
从上述分析结果可得,因噪声的存在,磁链函数的准确性与转速息息相关,限制了G函数在低速场合中的使用。因此,为了减小噪声对G函数的影响,文献[9]提出了一种带积分结构的磁链函数(以下简称F函数),具体表达式如下:

(7)
(8)
(9)
式中:λab、λbc、λca为电机线转子磁链,即λab=λa-λb,λbc=λb-λc,λca=λc-λa。
因为转子磁链是一个正负交替变化的周期函数,所以必然存在零点,这意味着F函数也存在跳变的过程,如图4所示。从图4可以看出,磁链波形过零点时刻,就是F函数的跳变时刻。与G函数判断不同的是,F函数的换相时刻需要在检测出跳变点后,延时30°电角度,这是因为F函数对线反电动势进行了积分。积分虽然改变了相位,但消除了微分项,从结构上避免了函数对噪声的放大,使F函数更加平滑。与G函数相比,F函数具有更小的数值波动,可以获得更准确可靠的换相点。
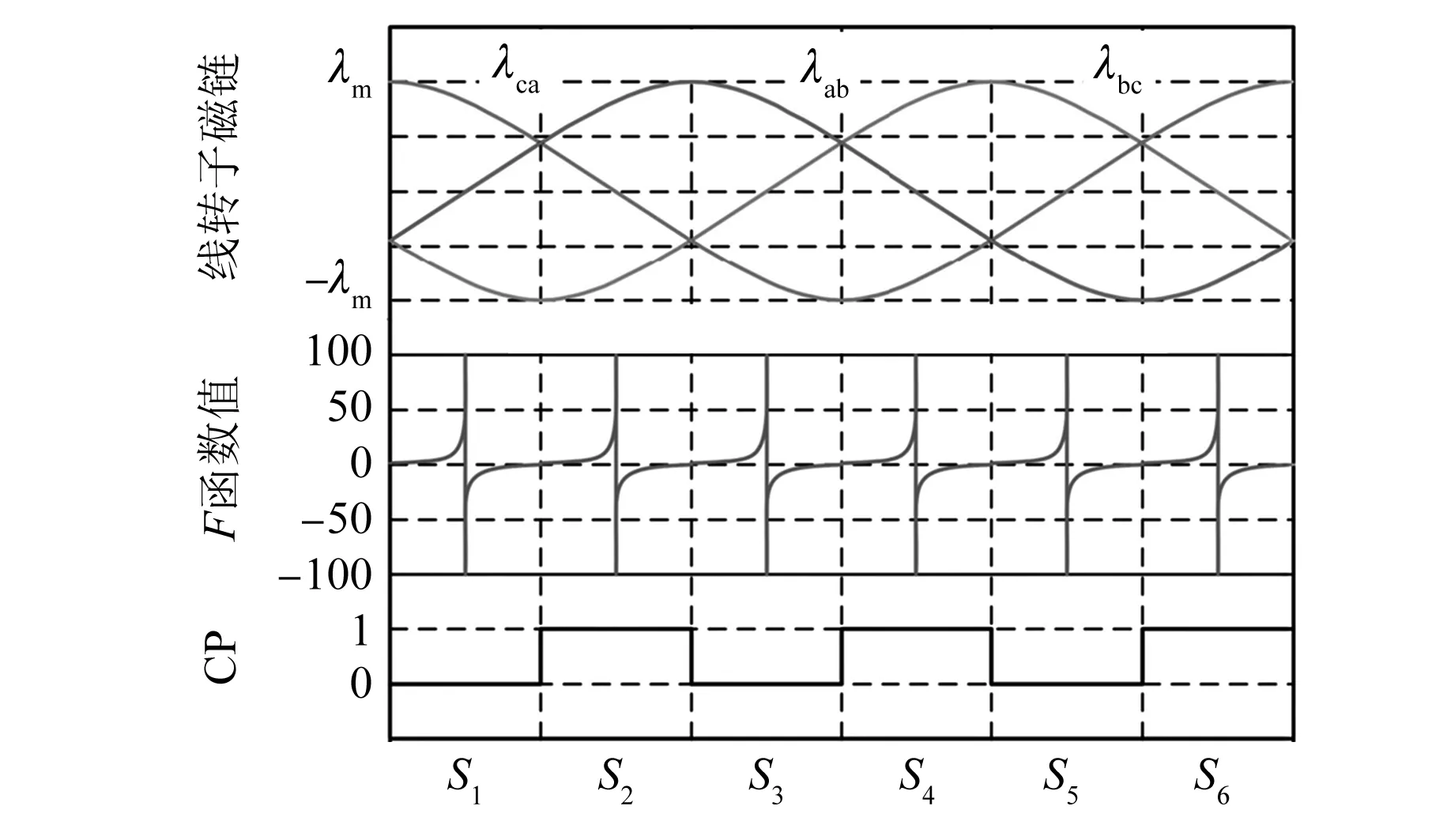
图4 线转子磁链函数、F函数及换相信号
2.2 纯积分模型的优化
从式(7)~式(9)可知,F函数存在积分结构,故必然存在零漂和初值误差的问题。为了消除其带来的不利影响,需要对纯积分模型进行优化。结合文献[13-15]的内容,本文采用BPF代替理想积分器,具体表达式如下:

(10)
式中:μ、ωn为滤波器参数。

图5 BPF Bode图
图5为BPF的Bode图。由图5可知,通过对ωn的选取可以得到BPF的中心频率,通过μ的选取可以得到不同带宽和相位特性。若选择ωs=ωc(其中ωs为电机电角度频率,ωc为BPF中心频率)则有零相位改变,即λab与fab同相位,此时无需30°电角度延时,一定程度上减小了换相误差;若增加μ,可以得到更大的带宽以及更平缓的相位变化,减小μ则有更窄的带宽、更剧烈的相位变化。值得一提的是,虽然采用BPF会使磁链波形产生畸变,但是该策略有效实施只需要磁链过零点的信息。本文中,采用实时调节BPF中心频率的策略,使ωs与ωc相等,得到一个零相位滞后的磁链过零点时刻,无需额外的相位补偿即可保证相位的精度。
2.3 换相点判断
低速时G函数受噪声的影响,产生巨大的数值波动,而传统换相点判断方法是将G函数的绝对值与阈值进行比较,得出换相时刻。相比较而言,F函数对噪声不敏感,波形相对平滑,如文献[9]所示,可采用符号的改变作为换相点判断的依据,提高换相点判断的准确性。然而前者会因为数值波动造成换相的提前或者误判,后者会受到微小数值波动的影响,存在误判的可能。因此,为了提高判断的可靠性,本文提出了一种新的判断机制,即采用一个新变量X替换对F函数或G函数数值的直接判断,同时动态调节阈值,紧跟电机运行状态,避免误换相的发生。X的定义为

(11)
阈值TH的动态调节
式中:T为采样周期;Ap为第p个导通周期内全部采样时刻的集合;N为一个大于1的正整数;F为Fab_ca、Fbc_ab、Fca_bc三者之一,根据不同的扇区选取不同的磁链函数,选择的顺序可参考表1,同时|F[i]|≤U,U为一个合适的正数;α、β为权重系数。

表1 F函数与扇区
换相点的判断方法为,在第p个导通周期内,判断X[p]是否大于TH[p]。如果为真,则进行换相;如果为假,则继续保持原状态。
变量X的本质是对F函数的积分,积分的存在进一步抑制了F函数的数值波动,大大降低了误换相的可能。虽然在理论上一个换相周期内F函数对电角度的积分是不存在的,但是由X[p]的定义可知,对F函数限幅后,在理论上,X[p]在转速不变的情况下是一个定值,因此可通过判断X[p]的大小得出换相点位置。通过式(12),使得阈值TH能够在不同速度下自动匹配到一个合适的值,防止误换相的发生。
3 仿真试验


表2 BLDCM参数
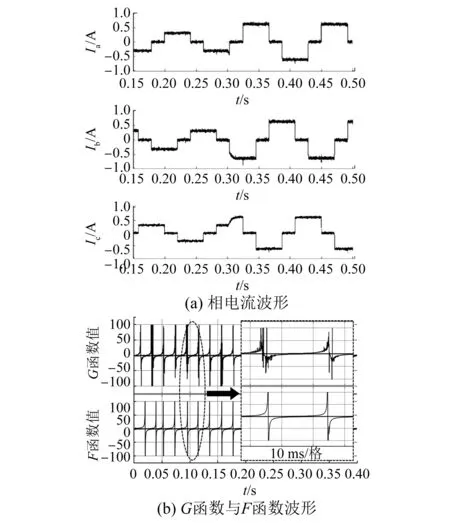
图6 G函数与F函数对比结果
图6(a)为施加噪声的相电流波形,图6(b)为G函数与F函数的波形。可以看出,在电流噪声的干扰下,G函数的数值呈现出巨大的波动,这与误差分析的结果一致。而F函数的波形相对平滑,说明F函数可以抑制噪声的影响,拥有更准确的换相信息。
图7(a)为基于LPF的定子磁链波形,图7(b)为基于BPF的定子磁链波形。可以看出,前者不能消除初始磁链误差,因此各相定子存在一个直流偏置并且无法消除,这会导致磁链过零点的提前或者滞后,从而造成换相误差。而BPF可以消除由初始误差造成的直流偏置,减小直流偏置对磁链过零点时刻的影响,从而提高换相精度。
然后验证基于BPF的F函数换相策略的效果。Simulink仿真框图如图8所示。在不同的转速和负载下,将霍尔信号与由F函数得到的换相信号进行对比。通过多次仿真和调节,得到α=0.53,β=0.11。
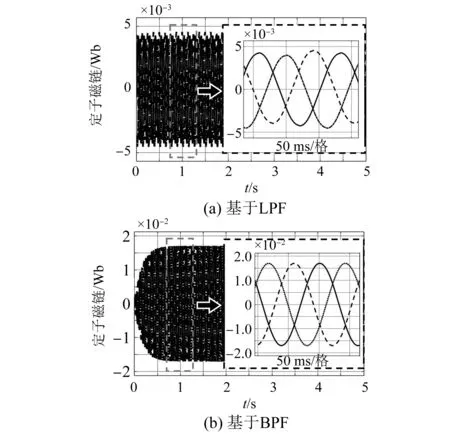
图7 磁链波形
图9为电机转速ω=60 r/min,负载从10 mN·m(电机额定负载的10%)变为20 mN·m条件下的仿真结果。图9(a)为相电流波形,图9(b)是F函数、F函数CP和霍尔CP波形,图9(c)是电机转速与负载波形。从图9(b)可以看出,通过实时调节BPF的中心频率,能够获得一个准确的换相时间点并且无需30°电角度的延时,而且函数CP信号与霍尔CP信号几乎趋于一致。当负载从10%跳转至20%时,换相时间并未受到明显影响,仍具有较高的准确性,说明该策略在低速时可以很好地抑制噪声,并且能够在一定的扰动下获得精确的换相点。
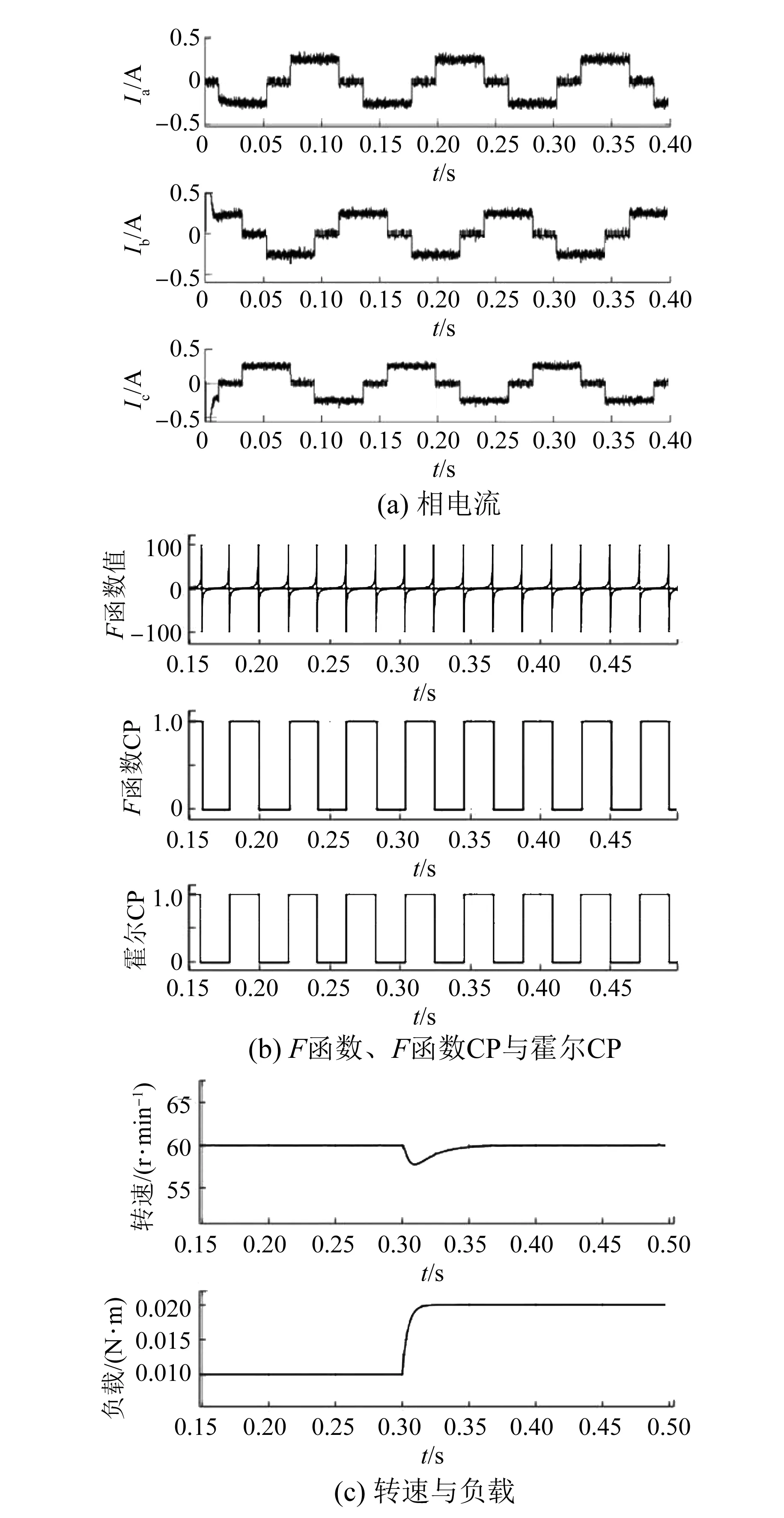
图9 60 r/min仿真结果
图10为电机转速ω=120 r/min,负载从40%变为80%条件下的仿真结果。从图10可以看出,稳态时,系统能够准确识别出换相位置,同时,当电机受到较大的负载波动时,F函数CP与霍尔CP有一个较小的位置误差,但是仍可以保证电机的稳定运行,说明该策略拥有较强的抗干扰能力。
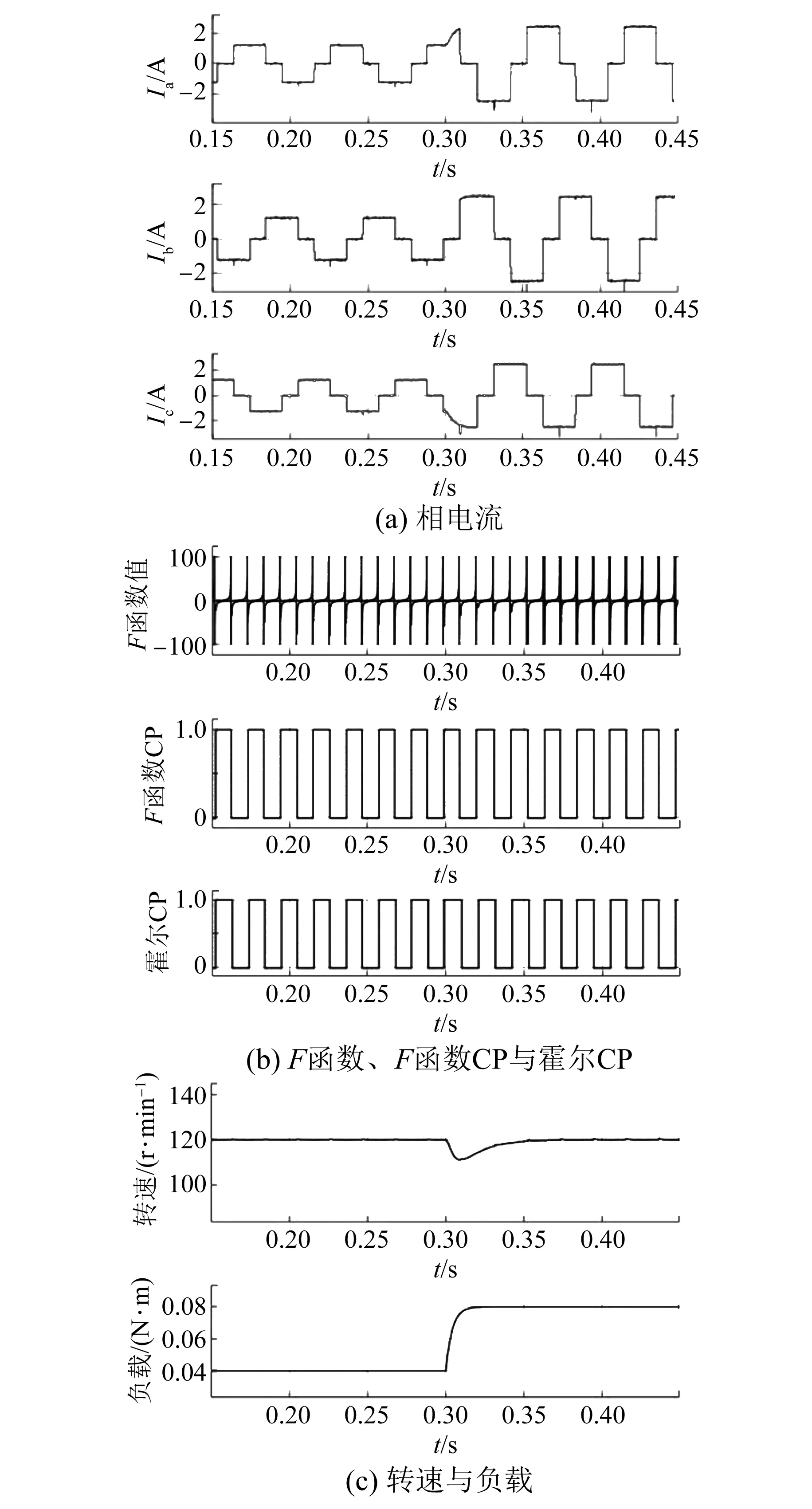
图10 120 r/min仿真结果
图11为电机转速120 r·min,80%负载下,F函数与换相信号的局部放大图。不可避免地,在某些情况下,F函数在换相点附近仍存在数值波动,若采用符号跳变的判断机制存在误换相的可能,但是从图11可以看出,本文中的判断机制可以准确识别出换相时间点,说明该机制拥有良好的可靠性。

图11 F函数、F函数CP与霍尔CP的局部放大
4 结 语
(1) 针对磁链函数对电流噪声敏感问题进行深入分析。结合分析结果,采用一种含有积分结构的新型磁链函数替代原磁链函数,以达到减小函数值波动的目的。
(2) 通过BPF替换积分器,消除了零漂和初值误差问题,同时通过调节BPF的中心频率,避免了额外的延时和相位补偿,间接减小了换相误差。
(3) 采用一种新型的换相点判断机制,通过对F函数的限幅和积分,减小数值波动的影响,同时通过对阈值的动态调节,使其能够匹配不同的电机运行状态,避免误换相。
通过MATLAB/Simulink进行仿真验证。结果表明,与G函数相比,F函数在换相点附近具有更小的数值波动,并且该换相策略可以在低速、电流噪声干扰、负载干扰的条件下,获得准确可靠的换相信号。
