高速铁路CTCS3+ATO系统优化方案研究
2021-04-29何志彬程林芳易海旺
何志彬,程林芳,易海旺,汪 洋
(1.中国铁道科学研究院 研究生部,北京 100081;2.中国铁道科学研究院集团有限公司 通信信号
研究所,北京 100081)
随着我国高速铁路网逐年扩大,运输压力不断提高,高速铁路运输效率亟需提升,高速铁路运营对于自动驾驶的需求不断增加,因而迫切需求信号系统更加高效、便捷和智能化。2016 年,列车自动驾驶(Automatic Train Operation,ATO)在珠三角城际铁路莞惠线(东莞-惠州)及佛肇线(佛山西-肇庆)投入运营,极大地提高了铁路运输效率和行车安全。2018 年,根据我国高速铁路信号系统应用现状,结合轨道交通用户需求,中国铁路总公司科技和信息化部发布了《高速铁路ATO系统暂行总体技术方案》。同年,CTCS3+ATO 系统在京沈高速铁路(北京-沈阳)试验段进行了综合试验,并上道载客试用。2019 年,中国铁道科学研究院集团有限公司根据自身设备特点和技术优势,完成了CTCS3+ATO 系统设备的研发工作,并在京张高速铁路(北京北—张家口)投入使用,首次实现了时速350 km 动车组自动驾驶技术的应用。如何在既有的高速铁路列控系统中更好地实现自动驾驶及其技术应用,是现阶段我国高速铁路重点研究的关键问题之一。根据京张铁路的运用经验,结合将来其他铁路线路引入ATO 的趋势及城市轨道交通全自动驾驶应用经验,对高速铁路CTCS3+ATO 系统进行优化研究,以进一步提高高速铁路CTCS3+ATO 系统的安全性和可用性。
1 高速铁路CTCS3+ATO 系统分析
列车自动驾驶技术分为5 个自动化等级(Grades of Automation,GOA),分别为无ATP 设备的手动运行(GOA0)、有ATP 设备的手动运行(GOA1)、有司机负责监督的半自动运行(GOA2)、列车配有乘务员的无人驾驶运行(GOA3)、无人值守运行(GOA4)。其中,GOA2 级的自动驾驶技术已经应用到CTCS3+ATO 系统中并取得良好的运用效果。
1.1 CTCS3+ATO系统结构及功能
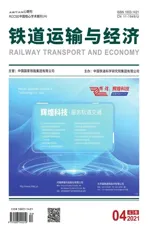
CTCS3+ATO 系统包括车载设备和地面设备。车载设备由列车自动防护系统(Automatic Train Protection,ATP) 和列车自动驾驶单元(ATO)、GPRS 电台及相关配套设备构成[1],其中ATP 由车载安全计算机(Vital Computer,VC)、人机界面(Driver Machine Interface Unit,DMI)、应答器信息接收模块(Balise Transmission Module,BTM)、轨道电路信息接收模块(Track Circuit Reader,TCR)、列车接口单元(Train Interface Unit,TIU)、数据记录单元(DRU)、GSM-R 无线通信单元(RTU)、测速测距单元(SDU)等组成。地面设备包括调度集中系统(Centralized Traffic Control System,CTC)、无线闭塞中心(Radio Block Center,RBC)、ZPW-2000 系列轨道电路、临时限速服务器(Temporary Speed Restriction Server,TSRS)、应答器及LEU、列控中心(Train Control Center,TCC)、GSM-R 通信接口等设备。为保证列车精准停车,在车站股道增加精确定位应答器,构成高速铁路CTCS3+ATO系统。CTCS3+ATO系统各设备新增或修改功能如下。
(1)ATP 车载设备在保留原有功能的基础上,增加列车开门防护功能,在DMI 显示界面中增设ATO 相关功能显示及操作,并根据ATO 自动驾驶的需要可适当调整[2]。车门及站台门联动控制功能由ATO 实现。
(2)列控中心(TCC)需实现站台门防护和控制接口功能[3-4],TCC 具备相关的采集和驱动接口。增加RBC-TCC 之间的通信数据,TCC 接收RBC发送的站台门联动控制命令,并向RBC 反馈站台门状态和报警信息。实现发送运行计划信息、站台门联动控制命令的功能,并完成对站台门状态信息的采集和对列车运行计划的处理。
(3)CTC 在实现既有功能的基础上,增加CTC 与RBC 间运营计划信息交互功能,实现对在线列车实时管理、自动发送对应的运行计划及自动调整运行计划等功能[5]。
(4)临时限速服务器(TSRS)增加高速铁路地面ATO 相关功能,新增无线接口服务器通信,实现与ATO 车载设备双向通信。接收CTC 发送的运行计划和站间数据,实现运行计划的转发功能。向ATO 车载设备发送站间线路数据,运行计划确认信息。新增站台门控制及状态信息,实现对站台门门控信息管理和对车门/站台门联动控制功能及状态的采集[1]。
(5)为了使ATO 系统能实现股道的精确定位停车,在股道增设精确定位应答器。精确定位应答器既要描述到站距离和开门侧信息,用于ATO 在站台停车点停车,同时,考虑到高速铁路实际应用中站台可不安装站台门,因而精确定位应答器中还需要描述是否有站台门信息。
高速铁路CTCS3+ATO 系统结构示意图如图1所示。
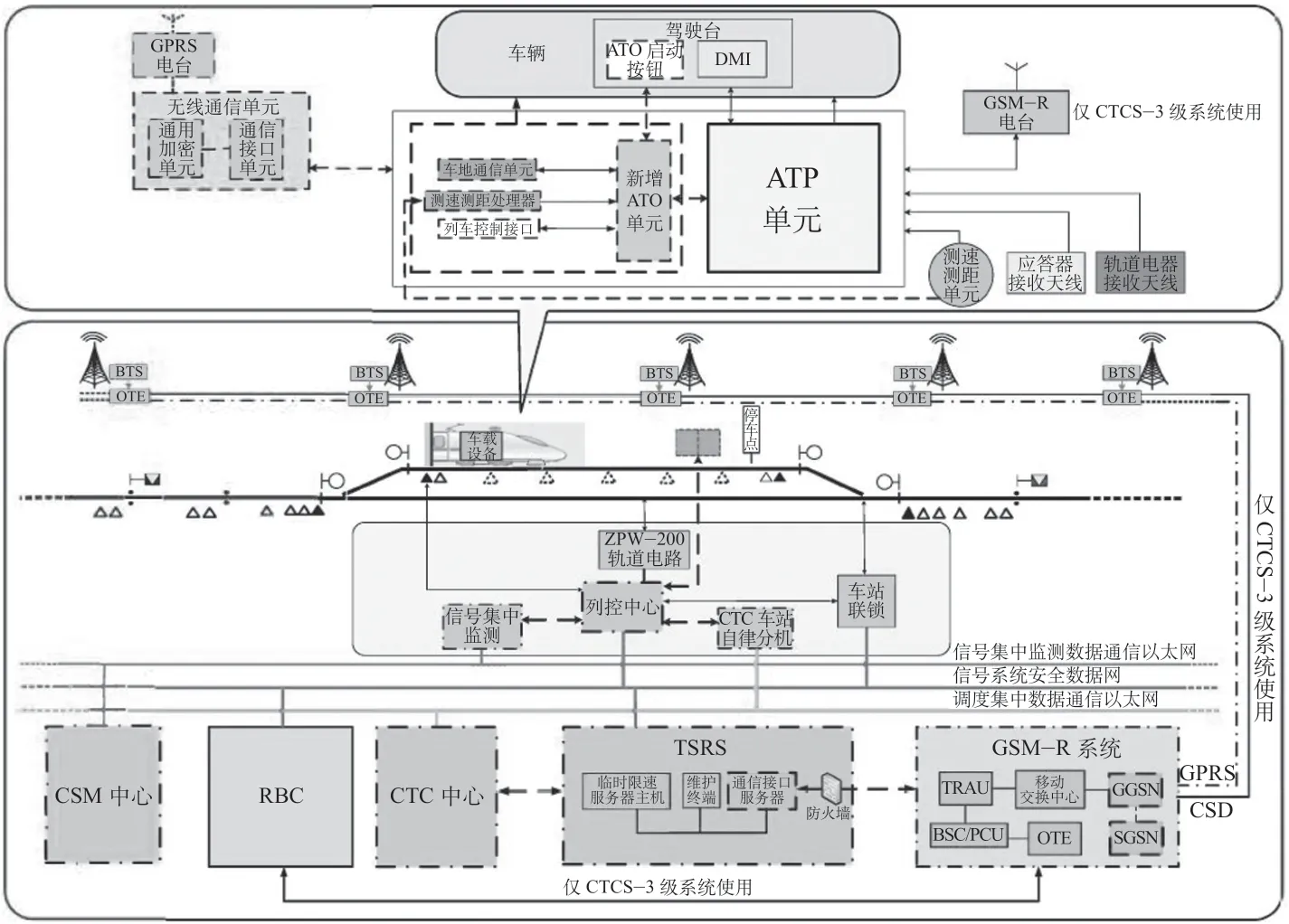
图1 高速铁路CTCS3+ATO 系统结构示意图Fig.1 Structure of CTCS3+ATO system for high speed railway
1.2 CTCS3+ATO系统需求分析
目前,我国在高速铁路ATO 技术领域处于国际先进水平,实现了GOA2 级的列车自动驾驶,有司机值守,由设备提供安全防护功能的自动驾驶,自动化程度相比人工驾驶有了进一步提升,简化司机操作,提升运行效率。高速铁路CTCS3+ATO 系统已初步实现自动化功能,但在列车定位技术、优化区间闭塞方式、站内换端作业和无人驾驶等方面的研究,仍有较大的提升空间。
(1)高速铁路CTCS3+ATO 的自动驾驶系统,是在既有CTCS3 级列控系统的基础上[6-7],车载设备增加ATO,GPRS 电台及相关配套设备,地面设备修改TSRS,TCC,CTC 等设备功能,实现自动驾驶。为了使ATO 系统能实现股道的精确定位停车,股道内还需增加精确定位应答器。区间定位技术及列车完整性检查仍沿用CTCS3 级列控系统现有技术,这样,自动驾驶系统在地面布置的设备不仅没有减少,反而增加了,特别是在环境恶劣的地区,由于大量地布置地面设备,不利于铁路的初期建设及后期的运营及维护。采用卫星导航系统定位技术可有效改善这一弊端,便于后续设备及技术升级。
(2)CTCS3+ATO 系统区间运行采用准移动闭塞方式,列车间隔虽是动态的,随着前方运行列车的移动而移动,但采用准移动闭塞系统的线路被划分为固定的、一定长度的闭塞分区。由于受到闭塞分区的限制,列车的行车许可终点必须在前方列车占用闭塞分区入口处,列车的最小追踪间隔也随之确定。随着铁路运输压力的提高,虽然对准移动闭塞进行了优化,但现有闭塞制式下区间最小追踪间隔已无法大幅缩短,不能满足列车运输效率不断提升的需求。采用更有效率的移动闭塞方式是主要发展方向。
(3)与传统人工操作列车折返相比,CTCS3+ ATO 系统换端作业虽简化了司机操作,将换端作业交由司机和系统共同完成,在一定程度上可缓解司机工作压力,提升了换端效率,同时安全性也得到了一定的提高,但仍未实现列车站内折返自动化,还需在司机辅助驾驶的情况下完成折返作业,不利于自动化的实现。
(4)目前,CTCS3+ATO 系统可实现列车区间自动运行、车站自动发车和停车、自动开车门和车门/站台门联动控制等功能,有司机监控自动驾驶,尚不具备自动激活、自动唤醒和休眠、自动调车、车门自动关闭等功能,距实现全自动无人驾驶,将司机的工作职能完全交由系统及控制中心完成,还需进行关键技术的积累及创新。
2 高速铁路CTCS3+ATO 系统优化方案分析
为更好地适应高速铁路运营需求,完善自动驾驶技术,针对CTCS3+ATO 系统结构及功能,提出相应的优化措施。
2.1 列车定位运用北斗卫星导航系统技术
北斗卫星导航系统是我国自主研制的卫星导航定位与通信系统,具有自主知识产权,拥有世界先进水平的测速与定位精度,并拥有其他卫星定位系统不具备的短报文通信服务。基于北斗卫星导航定位的列控系统可以连续并且准确获取列车位置信息,同时可减少地面轨旁设备,便于维护。与城际铁路系统相比,高速铁路各车站间距离更长,需大量布置应答器和轨道电路,造成高昂的建设成本和维护成本,而采用基于北斗导航系统定位技术具有良好的优势。
基于北斗卫星导航实现列车定位,车载设备增加基于北斗导航列车定位单元,车载卫星接收单元接收并处理北斗卫星导航信号及差分信息,计算列车位置,并将定位信息发送给ATP 主控单元,车载ATP 根据卫星定位数据并结合其他辅助信息,确定列车位置[8]。地面设备增加差分基准站及其他辅助设备,差分信息经车-地无线通讯系统发送给车载设备,根据基准站已知的精确地理位置信息,辅助车载设备完成定位,地面差分基准站根据定位需求和线路需要进行设置。基于北斗导航的列车定位系统,还可为实现基于移动闭塞的追踪间隔技术应用,缩短列车追踪间隔提供技术支持[9]。
2.2 区间运行实现移动闭塞
列车区间运行采用移动闭塞方式将不再依赖轨道电路,摆脱闭塞分区的限制,列车追踪间隔根据追踪列车的制动距离及前后列车间的安全距离确定且随着列车间距离实时变化,在保障列车运行安全的前提下,极大地发挥线路的允许通过能力。采用移动闭塞系统,车-地通信无需依赖地面轨道电路,列车完整性检查、列车定位及传递信息通过无线通信方式与车载设备通信,从而大幅减少轨旁设备,有利于降低后期维护成本,实现全线路紧追踪运行。
在移动闭塞制式下,基于北斗导航的列车定位系统实时、精确地计算列车位置,移动闭塞制式下区间列车追踪运行如图2 所示。通过GSM-R 将线路状态、列车位置报告、车站进路信息发送给RBC,RBC 根据接收的列车1 的位置信息和线路状态,计算出列车2 的移动授权并发送给列车2,列车2 车载设备接受移动授权,并根据列车性能、线路信息实时控制列车,确保运行安全。列车2 追踪的目标点是列车1 的安全尾部,安全尾部根据列车1 的确认尾端间隔一个安全防护距离。列车2 在区间追踪列车1 运行,行车许可随前车移动。相比较于CTCS3+ATO 的准移动闭塞制式,采用移动闭塞可以在确保列车运行安全的前提下,缩短列车追踪距离,压缩列车追踪间隔时间间隔。
2.3 站内折返实现自动换端
由于人的因素而导致的差错是不可避免的,而CTCS3+ATO 系统列车站内折返作业以自动化方式完成,可有效避免这一情况出现,对进一步减轻机务劳动强度,提高铁路运输效率及安全水平意义重大,并为实现全自动驾驶提供技术支撑。
CTC 运行图中增加自动折返计划,在列车运行过程中,根据实际运行情况,调度员实时调整运行计划并下发给车站CTC 设备,待列车办理客运业务完毕,到达预定折返时间后,CTC 通过联锁办理自动发车进路,并通过地面TSRS 向车载ATO设备发送折返命令和运行计划,车头准备进入休眠模式,并通过TSRS向地面设备发出无线交权申请,经地面确认后,向车尾发出无线激活命令,车尾由休眠模式进入激活状态,此时原来的车头应立即进入休眠模式,随着车载DMI 显示的发车倒计时完毕,列车以FS/ATO 模式运行,实现自动换端功能。在自动换端过程中,座椅可根据列车行进方向自动调整,省去调整座椅的人工操作。
图2 移动闭塞制式下区间列车追踪运行Fig.2 Train tracking operation under moving automatic block system
2.4 实现全自动无人驾驶
高速铁路CTCS3+ATO 系统的驾驶模式是有人驾驶的列车自动运行模式,处于自动驾驶模式(AM)时,司机根据提示按压ATO 启动按钮后驾驶列车[10],仍需司机进行发车前确认操作和瞭望列车运行前方的轨道情况等作业。为实现由系统对列车的自动驾驶与防护,具有GOA4 级的列车自动驾驶模式,在CTCS3+ATO 列控系统基础上,对CTCS3+ATO 系统中仍需司机操作的运营场景进行如下优化。
(1)设备上电。CTC 根据运行时刻表通过TSRS 提前对即将投入运营的动车组ATP 车载设备(含非本务端)上电,ATP 及ATO 车载设备开始自检,包括车地无线传输、综合定位等功能相关设备的状态检测及制动接口测试,完成自检后,ATP 车载设备自动进入待机模式(SB)。车载GSM-R 设备(含GPRS 电台)进行网络注册。
(2)唤醒。上电后,CTC 根据运营计划唤醒指定位置的休眠列车。列车综合自检完成后,远程自动操作ATP 车载设备启动流程,在ATP 启动完成后,根据CTC 发送的发车倒计时,进入全自动驾驶模式(FAM)。
(3)出动车段运用所/存车场。列车在唤醒成功后,车载设备向RBC 请求行车许可,CTC 将发车倒计时发送给列车;倒计时结束,出动车段运用所/存车场进路开放,ATO 根据车载设备提供的允许运行的监控曲线,以FAM 模式驶出动车段运用所/存车场。
(4)车门自动关门(防护)。站内办理客运业务时,动车组进入车站股道停车后,ATP 判断动车组停准停稳并根据接收的站台侧信息,对动车组车门进行开门防护。ATO 接收到该站办理客运业务的运行计划时自动开门,旅客乘降作业完毕后,ATO根据运行计划自动关闭相应站台侧的动车组车门,ATP 提供站台侧车门防护功能。车站设置站台门时,ATO 系统可实现车门/站台门联动控制功能。
(5)自动调车。对有需要办理调车业务的列车,自动进行调车作业时,设备自动选择调车模式,车载设备发出调车请求,RBC 判断该列车当前位置位于允许调车区内时,授权车载设备进入调车模式,ATO 根据调车信号显示进行调车作业。
(6)进动车段运用所/存车场。列车在停止运营服务后,按照进动车段运用所/存车场计划,自动触发进动车段运用所/存车场进路,自动关闭空调电热等系统服务,准备休眠。
(7)注销。列车运行服务结束后,根据计划,CTC 给指定位置列车发送休眠命令,车载收到命令后自动断电,进入休眠状态。车载设备断电后,CTC 通知电务人员远程断电。
3 结束语
智能铁路是铁路运输必然的发展方向,在高速铁路运输中采用自动驾驶技术实现列车运行操控自动化、无人化,是高速铁路智能化的重要标志,对提高我国高速铁路列控技术的核心竞争力具有重要意义。根据高速铁路CTCS3+ATO 系统实际的运用情况,对高速铁路CTCS3+ATO 系统提出优化措施,在高速铁路运输中使用北斗卫星导航定位技术,区间运行运用移动闭塞技术,采用自动化方式实现站内立即折返作业,实现更高等级的全自动无人驾驶,有利于提高系统运行安全性,保障运营秩序,提高运营质量,有效降低全生命周期的使用成本。