二维修正弹双核控制系统设计
2021-04-27杜忠华刘仁杰马瑞雪魏远旺
肖 雨,杜忠华,刘仁杰,马瑞雪,魏远旺
(南京理工大学机械工程学院,江苏 南京 210094)
0 引言
二维弹道修正技术是常规弹药发展的主要方向,目前其正朝着射程更远、精度更高的方向发展[1]。弹箭精确化以普通火炮为发射平台,将其改造成体积小、抗过载能力强的新型智能弹药,在战场上形成压制火力。智能弹药与普通导弹相比,在信息含量和技术含量上有很大提高,对于我国防空反导装备和技术的发展具有极其重要的现实意义。
作为修正弹药的核心,控制系统对接收到的信息进行处理,并控制各模块协同工作完成弹道修正,其性能影响重大,对二维修正弹控制系统的研究具有重大意义。
二维修正控制系统对实时性有较高要求,基于DSP或单片机的单核控制系统难以满足实时性要求。本文设计了一种基于DSP+STM32的双核控制器,并对其进行软硬件设计和实验仿真验证。
1 二维修正控制系统原理
二维修正是在一维修正的基础上加入横向修正,提升精度的同时也增加了控制难度[2]。本方案选用连续修正阀作为修正执行机构,如图1所示,阀芯上有多个扇形出气槽,在外壁上有4个互为90°的喷射孔,阀芯上有凹槽与电机输出轴相连。电机转动时,带动阀芯旋转,通过驱动器调节电机转至不同角度,可使不同位置喷射孔喷气,以此来达到修正目的。
在发射前先将标准弹道存储在非易失性的FRAM铁电存储器中,系统上电初始化,通过GPS和地磁传感器探测到弹体实时位置与状态信息,然后DSP对接收到的数据处理,解算出弹体实际运行轨迹。将实际弹道与预先装订的标准弹道进行比较获得偏差值,再根据偏差值计算出所需的修正量[3-4]。同时根据计算得到的修正量形成控制指令,与STM32进行通信,STM32设置定时器,待定时器时间到,起爆电路引爆火工品,电机带动修正阀芯旋转,可使不同位置喷射孔喷气,实现弹道修正。
图1 修正机构示意
2 控制器设计
本文设计的基于DSP和STM32的双核控制器,具有高实时性。DSP控制器选用具备32位浮点处理单元的TMS320FF28335[5],外设集成度高,能实时快速地实现各种数字信号处理算法,抗干扰能力强,此外,由于其具备高速处理能力,可用于数值运算密集的弹道信息处理等。而单片机的控制芯片选用STM32F427ZGT6,该芯片集成了单周期DSP指令和FPU(浮点单元)。控制器系统结构如图2所示。该系统主要由5个主要模块组成,分别是电源模块、DSP与STM32最小系统模块、升压起爆模块、存储和通信模块、修正机构驱动模块。控制器系统各模块主要功能如下:
a.DSP负责GPS和地磁信号处理,获得弹体实时坐标和姿态,输出火控参数给STM32,并输出PWM波控制电机启停及正反转,以实现弹道修正功能。
b.STM32与DSP通信,在接收到控制信号后实时控制升压起爆电路工作。
c.电源模块作为控制器的核心部分,用于向其他模块提供稳定工作电压[6],使电路两端电位差维持在恒定状态。
d.电机驱动模块驱动电机正反转,以此带动修正执行机构精准动作,实现修正功能。
e.升压起爆模块负责引爆火工品。
f.FRAM作为数据存储载体,掉电不丢失。
g.GPS模块和地磁模块可用于测量弹体实时坐标和姿态。
图2 系统结构框图
2.1 电源模块
系统外部输入24 V直流电源供各模块使用,利用 LM2596 降压型电源管理芯片将24 V电压分别降压至5 V、3.3 V、1.9V。采用LM2577芯片输出15 V电压供电机驱动芯片工作。芯片内核工作电压为1.9 V, GPIO 口工作电压为3.3 V,5 V电压则作为IR2130等其他芯片的工作电压。电源模块设计框架如图3所示。

图3 电源模块设计
2.2 存储和通信模块
存储模块用于存储GPS数据和弹道解算参数,以便对后续的控制算法进行改进。本文选用FM24CL64作为系统随机存储器,其写数据无延时、掉电数据保持10年的特性,保证了系统的可靠性。
通信模块主要用于DSP芯片与STM32芯片的通信,当DSP弹道解算完成,输出控制信号给STM32,控制升压起爆电路工作。
2.3 修正机构驱动模块
要控制修正机构动作,需要DSP发出PWM信号来控制开关器件的导通和关闭,使功率器件为电机的绕组提供良好的谐波电压和电流,提升电机输出转矩的同时避免电磁扰动的产生。电机驱动电路如图4所示。
图4 修正机构驱动电路
为能给电机提供具有较大驱动能力的正弦波信号,本系统电机驱动模块选用IR2130高压驱动芯片,可以输出6路驱动脉冲。其中3路输出信号具有电平转换功能。为提升控制精度,在电机的转轴端配置增量式光电编码器,能有效检测转子的位置。
在图4所示驱动电路中,共包含3个P型场效应管和3个N型场效应管。P型场效应管放置在上臂,选用型号为IRFR1205,当A+端为高电平时,场效应管IRFR1205的栅极被拉低,故IRFR1205的栅极和源极之间会形成一个负电压,场效应管NA+导通。R1与电源相连,作为NA+场效应管的上拉电阻,可上拉NA+的栅极,R1的电阻值选取应适当,若过小会导致三极管导通时电流过大,反之,若阻值选取过大会导致MOSFET栅极电压上升速度缓慢,影响开关性能。R2的作用是作为基极电阻使三极管正常工作在放大区。R3的作用是下拉型抗干扰电阻。R4的作用主要是减少振荡的同时减小栅极充电峰值电流,以及保护NA-型MOSFET不被击穿。
2.4 升压起爆模块
本系统升压模块选用MAX8570系列升压转换器,其采用内部n沟道开关和p沟道输出隔离开关,电源电压2.7~5.5 V,输出可达28 V。起爆电路如图5所示。Vout_FIRE端用于为起爆模块提供25 V工作电压,火工品一端接FIRE,另一端与阴极连接。当接收到控制信号时,CTRL_OUT端变为高电平,可控硅导通,火工品起爆。同时为屏蔽方波信号的影响,选用SN74AHC86D四路2输入异或门,STM32中2个IO引脚信号经过异或门作为升压起爆模块的控制信号,以免上电复位时IO口电平不定导致误触发。

图5 起爆电路
3 软件设计
本系统DSP与STM32开发环境分别基于CCS6.0和Keil5。控制系统工作流程如图6所示。

图6 控制系统工作流程
为节省GPS定位时间,在发射前先将卫星轨道参数存入GPS接收机,并将目标和环境信息存储在非易失性的FRAM铁电存储器中[7],作为弹道解算的参考依据。弹丸发射后系统上电初始化,GPS接收机迅速定位确定发射点,并结合地磁传感器接收弹体实时位置与状态信息,然后DSP对接收到的数据处理,解算出弹体实际运行轨迹。将实际弹道与预先装订的标准弹道进行比较获得偏差值,再根据偏差值计算出所需的修正量。同时根据计算得到的修正量形成控制指令,与STM32进行通信,STM32设置定时器,待定时器时间到,起爆电路引爆火工品,电机带动修正阀芯旋转,可使不同位置喷射孔喷气,实现弹道修正。
3.1 数据接收与处理
GPS数据帧共10位,包括1个起始位、1个停止位、1~8位数据位、不设置奇偶校验位[8]。当DSP接收到1帧有效数据,将其放入接收缓存寄存器,接收缓冲就绪标志位被置位,数据无效则重新接收。数据接收完毕,DSP对接收到的有效数据进行预处理和滤波,并将处理后的数据写入临时存储器FRAM。
为提升系统定位精度,避免随机因素干扰,本系统采用无迹卡尔曼滤波(UKF)算法对接收到的弹道数据进行处理[9]。UKF算法基于线性滤波框架,通过使用无迹变换来处理非线性传递问题,对精度和稳定性有保障。非线性弹道观测方程组为

(1)
X为状态量;W为过程噪声;V为观测噪声;k为时间序列;f为非线性状态方程函数;h为观测方程函数。
UKF算法处理过程主要分为以下几个步骤:
a.根据式(2)和式(3),计算出2n+1个采样点及相应权值,也称为(无迹)UT变换。
(2)
(3)

b.计算Sigma点集的一步预测和协方差矩阵,并根据得到的预测值进行UT变换,产生新的Sigma点集。
c.将最新得到的Sigma点集代入式(1),计算出预测观测量,并通过加权求和得到系统预测的均值及协方差。
d.计算增益矩阵,并进行状态和协方差更新。
3.2 修正机构控制
本系统采用增量式光电编码器结合DSP的eQEP模块,用于检测电机的转速、转向以及电机的绝对位置信息和相对位置增量。
为提升修正机构动作精度,加快控制系统响应速度,采用基于神经网络的位置-速度双闭环PID控制算法[10]对脉冲修正机构进行精准控制。将PID控制规律与神经元网络相结合,根据控制效果进行在线学习和调整,加快收敛速度,提升控制系统性能。
PID控制由比例、积分、微分3个环节组成,并形成统一标准信号控制修正执行机构动作。将PID和神经网络相结合主要有2步:首先定义具有比例、积分、微分功能的神经元,构成PID神经元;接着根据PID神经元控制规律使基本神经元构成新的神经网络,并找到合理有效的计算学习方法。作为对传统PID控制的改进型控制算法,单神经元构造PID控制器网络输入为
(4)
PID控制器网络输出为
u(k)=W1X1(k)+W2X2(k)+W3X3(k)
(5)
Wi为PID控制器中的参数KP、KI、KD,可以通过在线调整PID的3个参数使之达到最优值,进而达到改善控制系统性能的目的。
4 实验及仿真
4.1 通信模块功能验证
利用CCS对DSP与STM32通信过程进行仿真观察,当DSP与STM32开始通信前,标志位均为初始值0;DSP向STM32发送数据后,tx_flag标志位置位,STM32正确接收后,其LED全部点亮,DSP接收到0xAA,置sci_tx_success标志位,并点亮其2个LED,最终2个芯片的LED均全部点亮,验证了该模块通信较为可靠,满足设计功能要求。
4.2 升压起爆模块功能验证
要验证电路板的升压起爆模块。首先在上电前将代码烧写入电路板,接着将火工品两端分别连接FIRE和GND线,系统上电初始化后等待数秒,点火头被引爆。同时通过示波器观察起爆瞬间火工品两端电流变化,在起爆瞬间火工品两端电压高达25 V,且只有当FIRE和CTRL控制信号同时作用才能起爆成功,起爆波形如图7所示。由图7可看出升压起爆模块功能正常,满足设计要求。
图7 起爆放电波形图
4.3 数据接收与处理仿真验证
发射2 s后开始接收测量数据,并对二维修正弹全弹道进行UKF滤波。首先设置过程噪声和量测噪声协方差矩阵、弹丸自身参数等产生初始弹道数据的初始条件。x-z平面弹道轨迹如图8所示。
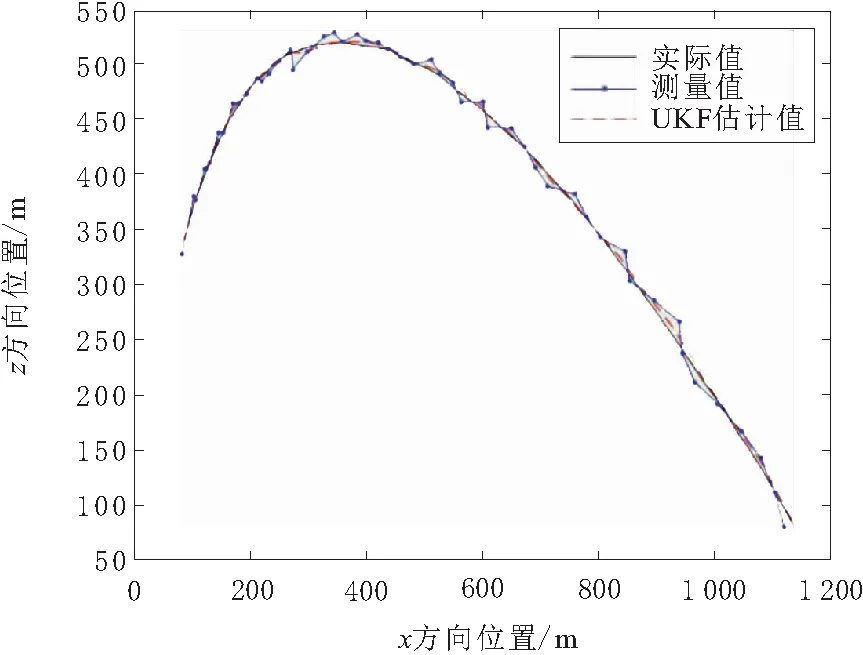
图8 x-z平面弹道轨迹
仿真表明对弹道数据进行UKF滤波处理可以降低测量数据带来的误差,提升控制系统精度。
4.4 修正机构控制模块验证
要验证电机驱动模块功能是否符合设计要求,首先需要搭建实验设备,编写代码控制电机正反转,先稳定加速到最大设定值,后匀减速直到电机转速为0,再控制电机按设定规律进行反转。通过示波器观察电机空载时运行过程的PWM波形图,验证表明电机驱动模块功能正常。
为验证脉冲修正机构功能特性,搭建直流电机控制平台,采用增量式光电编码器配合DSP的eQEP模块,用于检测电机的转速、转向以及电机的绝对位置信息和相对位置增量。对脉冲修正电机控制模块进行系统建模,并采用PID神经网络控制算法进行仿真试验,验证脉冲修正机构的实时性与可靠性。选取恰当的电机阶跃信号幅值,修正机构的电机响应特性曲线和控制误差曲线分别如图9和图10所示。

图9 修正机构电机响应曲线
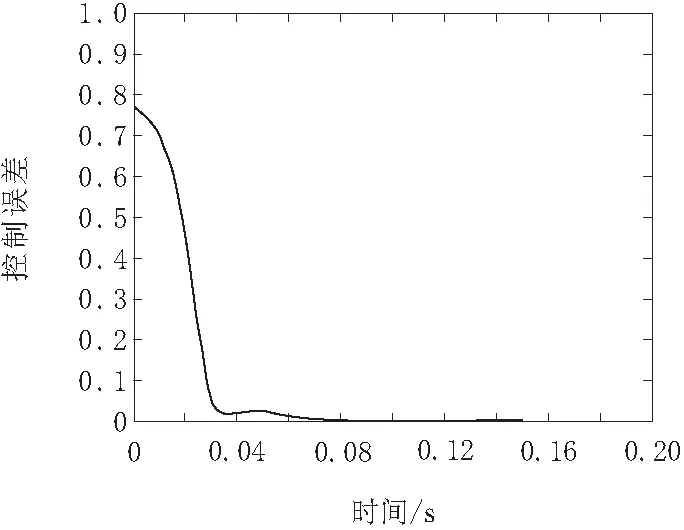
图10 控制误差曲线
由图9和图10可知,修正执行机构控制量能迅速响应,趋近目标值,且控制误差会在起控初期急剧下降,最后将误差限定在极小的范围内,表明采用神经网络对修正执行机构电机进行控制效果较好,能保证修正机构控制精度和实时性。
4.5 系统联调
为验证该控制系统工作性能,采用蒙特卡洛打靶法对修正控制效果进行分析,忽略随机误差的影响,图11为给出的二维修正弹算例在修正前和修正后的弹道落点散布图(模拟打靶100次),由图11可知,修正后弹道落点散布密集度得到较大提升,满足设计要求。
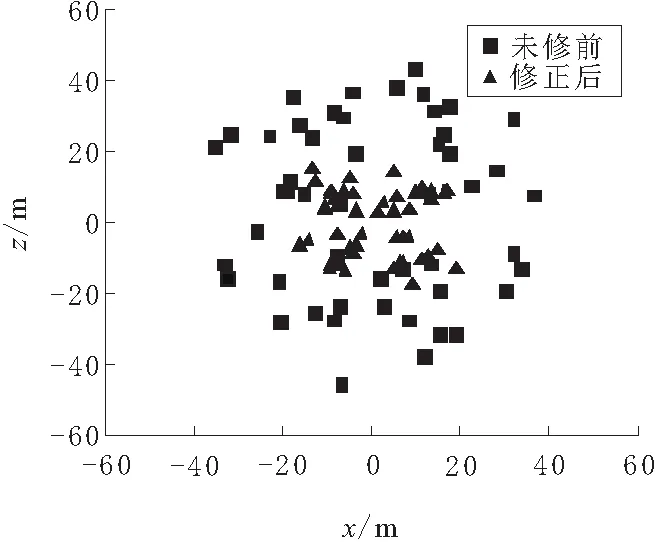
图11 落点散布对比图
5 结束语
为提升二维弹道修正控制系统精度和实时性,本文采用连续修正阀作为修正执行机构,设计了一种基于DSP和STM32的双核控制器,完成了控制系统总体结构设计,并对主要功能模块展开详细的软硬件设计,采用无迹卡尔曼滤波对弹道数据进行处理,并对修正机构进行神经网络PID控制,通过实验与仿真,验证了控制系统的实时性与可靠性,为类似控制系统设计提供参考。
