基于人工鱼群算法的无人机森林大火检测
2021-04-27王子豪
王子豪 李 霄
河北工程大学,河北 邯郸 056038
自2019年9月火灾发生以来,澳大利亚森林大火已经蔓延至昆士兰州、新南威尔士州、维多利亚州、南澳大利亚州、西澳大利亚州、塔斯马尼亚州等地方,火势凶猛,令人措手不及。截至2020年2月1日,30多人死亡,数千人流离失所,约5亿动物死亡[1]。火灾及其引发的后果对澳大利亚经济造成致命的影响[2]。随着全球变暖,天气干旱,极端天气频发,森林大火的潜在风险越来越大。无人机具备飞行速度快,检测范围广,不受外界条件制约等优势,在森林防火中扮演着越来越重要的角色[3]。
2019年9月的森林火灾之后,澳大利亚官方提高了对应急救援工作的重视程度,拟在重点防火区域设立应急行动中心,并使用无人机对火情进行检测。当前澳大利亚投入森林大火检测的无人机主要有中继器无人机和SSA无人机,中继器无人机携带传输装置,扮演着在将SSA无人机侦查到的火情传递到应急行动中心的角色。而SSA无人机携带高清和热成像摄像机以及遥测传感器[4],监控不断变化的前线火情形势。前线消防人员配备可接受数据的设备,该设备也可以用作个人定位。在火情未被查明前,消防员不直接前往火场。通过SSA无人机、中继器无人机和应急行动中心(EOC)的配合,在最大范围内检测火情,当火情发生时,应急行动中心以最快速度指挥现役消防人员,获得最佳的灭火效果。而应急行动中心的选址位置,SSA无人机和中继器无人机的最佳数量和组合直接决定了火情的检测范围和灭火效果。
针对上述问题,已有学者做了一些研究。本文以火灾事件的规模和频率为参数,综合考虑经济性、可用性和安全性,研究SSA无人机和中继器无人机的组合问题,并得出以下结论:应急行动中心和SSA无人机在火灾中的放置是一个“NP-Hard”问题[5]。对于这类问题,使用遗传算法很容易陷入局部最优化,而无法求出真正的最优解。所以本文选择一种约束条件下的人工鱼群算法。
人工鱼群算法通过设立人工鱼群,模拟真实鱼群的聚集、觅食、尾部碰撞和其他行为,由局部到全局,逐步搜索,求出最优解。当人工鱼群视野范围内出现食物浓度更大的点,鱼群则从当前位置转移到食物浓度更大的位置。人工鱼群算法是一种有效的优化算法,与遗传算法相比,该算法具有可行性强、全局寻优能力强、寻优速度快等特点。
1 基于无人机监测的EOC信号最优覆盖模型
本文建立的模型以火灾事件的大小和频率为参数,根据澳大利亚维多利亚州的国土面积数据,找到SSA无人机的最短巡航路径,计算中继器无人机与应急行动中心之间的最大距离,并使用人工鱼群算法构建应急行动中心和中继器无人机的组合单元,以扩大应急行动中心的信号观测范围。该模型以SSA无人机和无线电中继器无人机的组合结构,作为监测的基本单元,完成了对火灾监控区域的全覆盖。
1.1 EOC最大检测范围的计算
假设中继器无人机的飞行距离为X,最大飞行速度为Vmax,最大飞行时间为tmax,使用飞机的时间和速度关系函数则可以表示为:

假设中继器无人机悬停时消耗的能量等于无人机以最低速度巡航时的能量消耗,由式(1)可计算出在巡航路程一定时,中继器无人机最小的飞行时间和最小飞行速度。无人机的飞行时间和飞行速度函数如图1所示。
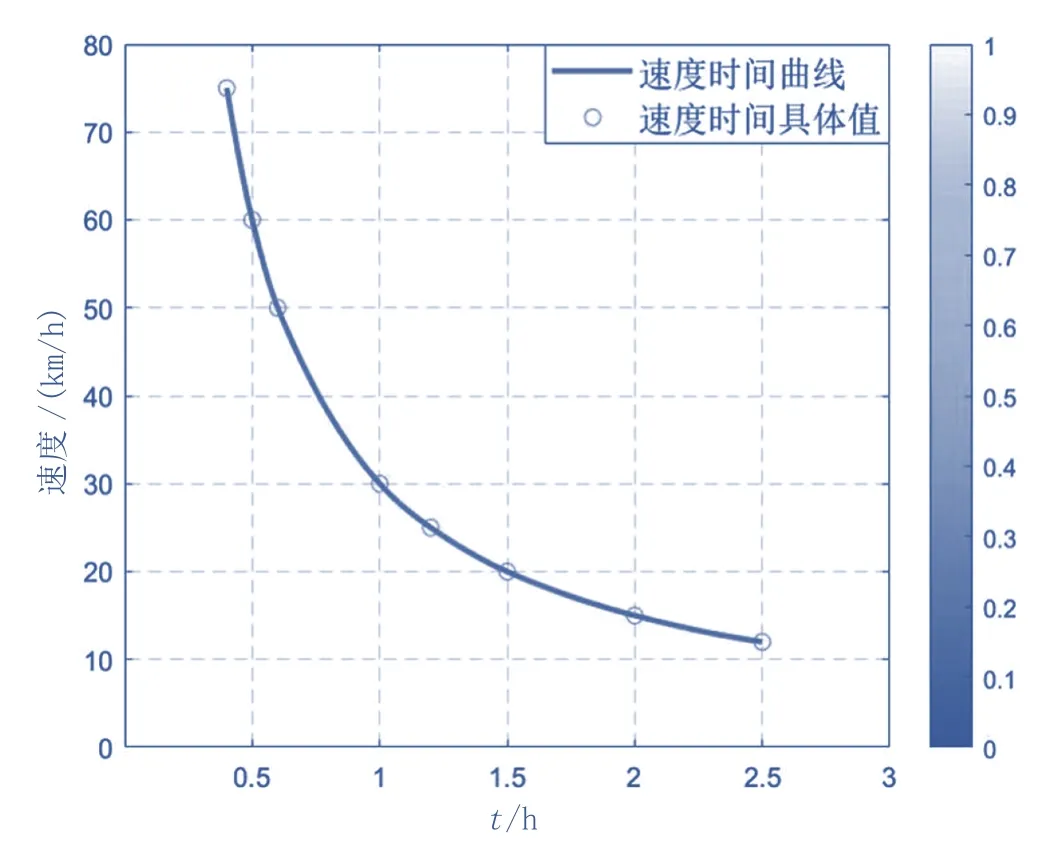
图1 中继器无人机运行速度时间函数
根据无线电中继器无人机之间的组合关系,为了保证中继器无人机在电池耗尽,替换下一台无人机期间信号不中断,同时也为了保证中继器无人机最大的工作时间。那么,无线电中继器无人机的悬停时间应为运行时间的两倍以上。无线电中继器无人机及其替代无人机往返选定目的地的工作状态和时间如图2所示。
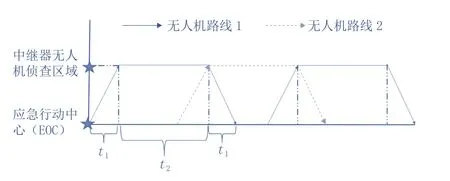
图2 中继器无人机运行速度时间函数
图2中无人机线路1是第一架中继器无人机的运行路线,无人机线路2是第二架中继器无人机的运行路线。两架无人机在应急行动中心(EOC)和目的地之间的飞行时间为t1,悬停时间为t2。

中继器无人机的飞行时间和飞行速度之间的关系为:

根据式(2)和式(3),可得出如下方程式:

无线电中继器无人机和应急行动中心(EOC)之间的距离关系是:

已知无人机最大飞行直径为X=30 m,无人机平均速度为v=12 m/s,将其代入式(5):

也就是说,速度越大,中继器无人机的检测范围越大,为了使中继器的信号传输范围最大化,将飞机飞行速度取为最大速度,即V=Vmax,改进后的中继器无人机运行方程为:

中继器无人机悬停时间与应急行动中心(EOC)的距离x之间的计算关系为

已知X=30 m,vmax=72,vmin=12 m/s,代入式(8),应急行动中心(EOC)的最大监测半径为x=12.86 km.
1.2 EOC和中继器无人机的组合结构
中继器无人机在应急行动中心和监测位置间往返期间,信号源的位置将不断调整,以实现最大的信号覆盖面积。当使用三角形结构时,每次往返旋转60°,以实现覆盖面积的最大化。基于中继器无人机EOC最优信号覆盖如图3所示。
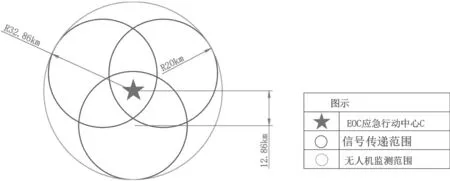
图3 基于中继器无人机EOC最优信号覆盖
中继器无人机监测范围和应急行动中心的信号覆盖率都达不到100%,因此本文以90%的覆盖率为标准值。为了保证中继器无人机的最大信号传输距离,中继器无人机往返需要0.89 h。因此,为了使信号的覆盖面积在一小时内达到标准值,有必要使中继器无人机和EOC组成的结构在一个周期内的旋转次数小于3次。经过计算可知,当中继器的信号源大于2时,在考虑经济成本的情况下,本文选择以信号源为中心的三角形分布结构。
1.3 EOC信号传输范围与SSA无人机巡航路径
SSA无人机的信号检测范围与地面人员信号接受范围有关,在平坦区域为5 km,在城市区域为2 km。由于地面灭火人员和SSA无人机同时工作,因此假定地面灭火人员携带足够的电池,使SSA无人机一直保持工作状态,SSA无人机的飞行速度可以恒定为20 km/h。
由于中继器无人机的信号传输周期性地工作,且信号源在每个周期内的变化次数为2,因此信号源的停留时间可计算为0.36 h。

注:x’为地面信号接收范围。
SSA无人机的火情监测速度是:

可以看出,SSA无人机监测EOC信号覆盖区域的时间是:

无线电中继器无人机的续航时间为0.89 h。因为SSA无人机监测一周的时间要比中继器无人机的时间长。也就是说,在计算SSA无人机的监测范围时,可以忽略中继器无人机的影响。大致可以认为,监测期间的覆盖率始终高于标准值。
因此,为了使计算的监测范围接近最真实的监测范围,引入了智能值的概念。智能值与检查时间呈负相关。SSA无人机检查后经过的时间越长,智能值越低。

通过智能值求和功能,计算巡逻路线,使巡逻路线上的智能值最高。可以看出,SSA无人机的检测效率远高于中继器的传输效率,也就是说,在中继器无人机悬停时间内,一个单独的SSA无人机就可以完成对覆盖信号区域的检测。当中继器无人机巡视完一周后,SSA无人机已经同时完成了EOC覆盖区域的检测。所以,每个组合结构需要配备至少6架无线电中继器无人机和1架SSA无人机。其覆盖范围为:1079.7796πkm2。
2 基于人工鱼群的EOC定位策略
2.1 火灾面积的计算
为了安排无人机进行火情监测作业,必须首先计算火力区域。根据2019年澳大利亚山火数据(数据由澳大利亚政府气象局提供),然后用MATLAB软件读取图片,进行灰度处理[6],得到其灰度值,根据196的值与总单元的比率,196的值表示火灾区域。计算火灾面积,火灾面积为79 209 km2。
2.2 人工鱼群算法
人工鱼群算法(AFSA)是一种模拟自然界中鱼群觅食行为的智能优化算法[7]。首先将研究对象无人机组合与人工鱼群进行了比较。然后模拟鱼群的觅食行为(FB)、群集行为(SB)、撞尾行为(RED)和随机行为(RB),每个人工鱼个体通过上述行为进行局部区域优化,人工鱼个体将逐渐聚集在极值点附近,从而实现群体的全局优化;全局最优解也可以通过跟踪和标记最优个体的状态来找到。
数学计算过程如下:
(1)觅食行为(FB)
式中,步长是行走的步长。由于调节周期的限制,此处选择10 min。
(2)群集行为(SB)

式中,Rv表示人工鱼的视野,此处设置为15 min;M代表人工鱼群的总数。
(3)撞尾行为(RED)
(4)随机行为(RB)

2.3 EOC位置策略研究
人工鱼群算法应用定位设置策略,需要根据实际情况做出相应调整。首先是将目标设定为:①无人机灭火覆盖范围达到最大。②每个无人机组合的覆盖区域重叠率最低。这两个目标被设置为算法公告板的目标函数。因此,每次人工鱼个体执行觅食、集群和撞尾操作时,都需要重新计算目标函数,同时,还需要考虑鱼群的游动问题。由于本文考虑了鱼群的覆盖范围,因此鱼群的覆盖范围的优化实际上是鱼群位置设置的优化问题,因此鱼群的游动方向实际上只是在位置发生变化时。根据遗传算法(GA)和人工鱼群算法(AFSA),对EOC选址结果进行优化计算。使用AFSA算法可以更有效地覆盖火灾区域,它可以自行移动以填补空缺位置,可以提供所需无人机和无线电中继器无人机数量的准确数据。基于之前获得的无人机的组合覆盖模型覆盖面积为1079.7796πkm2,火力面积为79 209 km2。根据上述算法,可以得到23个组合结构。即23个地点,23架SSA无人机,138架无线电中继器无人机。
3 结 论
本文构建的由SSA无人机巡航监测火情,中继器无人机进行数据传输,应急行动中心再指挥消防人员灭火的模型,为当前世界火灾的预警提供了新的思路,减少了消防人员的伤亡。在全球变暖,极端气候频发的今天,森林火灾的风险也越来越大,林火管理工作更应注重对火灾前期的侦查,提高森林大火监测能力,加强宣传力度,从根本上降低森林大火发生的可能性。
