无人碾压机轨迹跟踪算法及能耗规律研究
2021-04-26杜 续,宋 康,谢 辉
杜 续,宋 康,谢 辉
无人碾压机轨迹跟踪算法及能耗规律研究
杜 续,宋 康,谢 辉
(天津大学机械工程学院,天津 300072)
无人碾压机是降低人工作业负担、改善碾压作业品质和效率的重要技术途径.但由于碾压机吨位高、转向阻力大,且经常工作在复杂非结构路面上,常规车辆轨迹跟踪算法的能耗通常较高,影响了控制系统的电能平衡、可靠性以及综合能效.为此,针对运行在水电大坝上的无人碾压机,提出了面向节能的串级抗扰轨迹跟踪算法,同时研究了该算法对无人碾压机转向系统能耗的影响规律.首先,针对碾压机高吨位造成的转向速度慢、寻迹易超调的问题,采用位置预瞄算法对转向系统进行提前控制,进而减少超调量,降低能耗.其次,针对车辆受路面起伏干扰定位量测噪声大的问题,提出了车身姿态校正算法,通过测取无人碾压机前、后车身的横滚角对定位结果进行修正,减少噪声干扰,降低能耗.最后,为定位中小幅度高频噪声的干扰,通过采用非线性误差反馈控制律控制,降低方向盘在小距离误差带内的高频波动,实现转向系统节能.在水电大坝建设现场开展了实车试验,结果表明; ①采用优化的预瞄距离与无预瞄的标称控制器相比,可降低转向电机能量消耗24.7%,使得轨迹跟踪精度稳定在 ±0.15m;②采用姿态校正算法可以减少转向电机29.2%的能量消耗,并将轨迹跟踪精度改善了33.0%;③采用非线性误差反馈控制律在距离误差无明显恶化(0.06m内)情况下,可降低转向电机能耗31.8%.
无人碾压机;轨迹跟踪;能耗优化控制;预瞄算法;姿态校正
振动碾压机作为一种高效的压实机械,广泛应用于大坝、道路等工程建设中[1].无人碾压机在减轻操作人员的工作量、提高压实作业效率和质量方面具有广阔的应用前景.精确和节能的轨迹跟踪显然对无人碾压机的性能和效率至关重要.
然而,与乘用车相比,无人碾压机的横向控制更具挑战性,转向系统能耗更大.主要原因如下:①碾压机的质量通常大于20t,比乘用车重10倍以上,转向系统的阻力扭矩更大;②碾压机工作路面非结构,多数是大粒径块石或斜坡,这些因素一方面导致转向阻力扭矩进一步增大,另一方面造成了车身姿态变化波动,并导致车载GPS(全球定位系统)天线的定位定性波动;③碾压机是一个多体系统的铰接结构[2],其多运动自由度特征,减弱车辆横向刚度,进一步增大了轨迹跟踪控制的难度[3-4].
针对铰接式车辆的轨迹跟踪算法,大量学者提出了不同的控制方案.Uzunsoy等[5]以及后来的Khalaji[6]提出了基于模糊逻辑的PID(比例-积分-微分)控制器,用于分析横向误差和航向误差.但是因为控制器问题是高度非线性的,所以基于PID的控制算法响应速度慢,并且通常需要繁琐的控制参数整定[7].
为解决PID控制响应速度慢等问题,基于模型的轨迹跟踪算法受到广泛关注.邵俊恺等[8]基于地下矿车的运动学模型利用强化学习算法对PID参数进行自整定,提高控制系统的鲁棒性和快速性.Khalaji等[9]和Erkan等[10]对载重汽车(LHD)的非线性运动学模型、动力学模型以及鲁棒控制进行讨论.Nayl 等[11]分析了运动学参数对模型预测控制器(MPC)的影响.之后,Yue等[12]利用MPC实现了对拖挂车系统轨迹的稳定跟踪.近年来,针对碾压机基于模型的轨迹控制逐渐形成热点.Bian等[13]对碾压机运动学建模,并基于Lyapunov稳定性设计了控制律.Xu 等[14]基于碾压机运动学模型提出了一种分层的主动干扰抑制控制器,显然,对于碾压机与地面间存在的侧滑效应未考虑.而Nayl等[15]提出了一种考虑时变滑移角的MPC(模型预测控制)解决方案.Yang等[16]提出了一种具有侧滑补偿的碾压机轨迹跟踪控制方法.但是上述方案都需要较高的计算量和精确的模型.
然而,上述研究的重点在轨迹跟踪精度以及稳定性能上,关于控制过程中的能耗问题却鲜有研究.对于无人驾驶工程车辆,高电能消耗使得控制系统需要匹配高扭矩转向电机、大容量电池和大功率发电机,这不仅增大了成本,也影响了可靠性,成为工程应用中的难题.
为此,本文提出了一种面向节能的串级抗扰轨迹跟踪算法.在串级主动抗扰控制器框架下,引入预瞄算法主动适应碾压机转向速度慢的问题,减小轨迹跟踪控制过程中的超调量;添加姿态校正算法,修正定位坐标,抑制噪声,降低能耗;在距离误差控制器环节设置非线性误差反馈控制律来降低小距离误差带内方向盘的高频波动.在水电大坝填筑现场实车试验,对算法进行了试验验证,量化分析了节能效果.
1 试验与测试平台
1.1 无人碾压机
如图1所示,无人碾压机是一个典型的由前压辊和后车身组成的多体系统.本研究使用的无人碾压机试验平台采用的主要传感器的功用以及关键参数如表1所示,执行机构-转向电机的关键参数如表2 所示.

图1 无人碾压机测控系统布置
表1 主要传感器关键参数

Tab.1 Key parameters of the main sensors
表2 转向电机关键参数

Tab.2 Key parameters of the steering motor
1.2 碾压机运动学模型

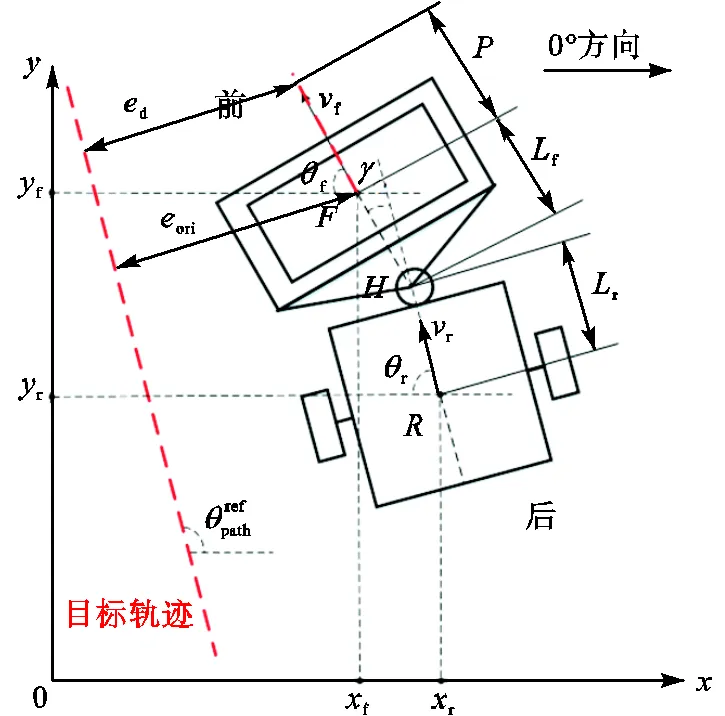
图2 碾压机运动学模型
该模型为被控对象,在该模型上开展面向节能的串级抗扰轨迹跟踪算法的设计和分析研究.
2 面向节能的串级抗扰轨迹跟踪算法
基于第1.2节中的运动学模型,设计面向节能的串级抗扰轨迹跟踪算法,其控制架构如图3所示.分别以横向距离误差和航向角控制作为串级控制的内环和外环,最终计算所需的方向盘转角,实现目标轨迹跟踪.
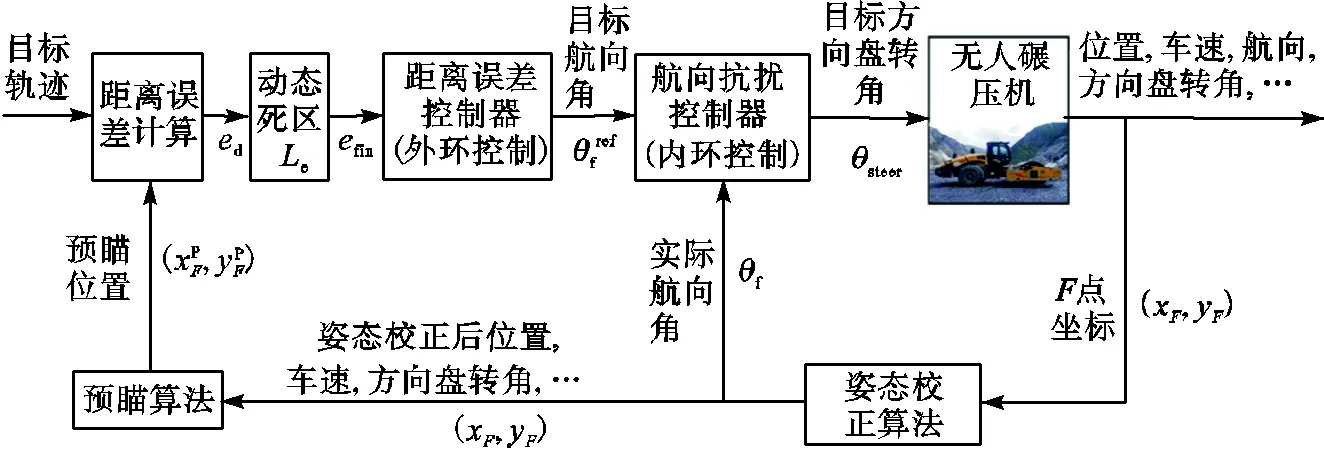
图3 面向节能的串级抗扰轨迹跟踪算法架构
2.1 航向抗扰控制器
将式(1)带入到式(3)简化后得
根据式(4)设计如下抗扰控制器:
由此,将式(5)改造为积分器:
针对式(6)设计比例控制器:
2.2 姿态校正算法

首先计算俯仰产生后对无人碾压机横向运动造成的距离误差,即

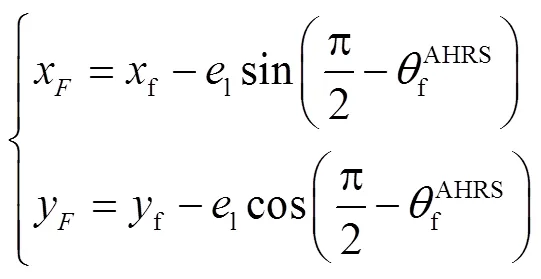
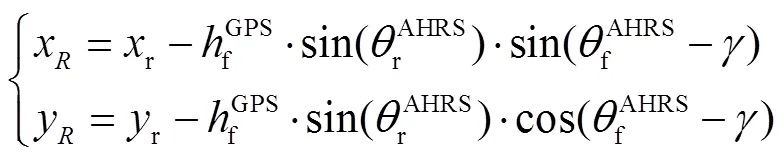
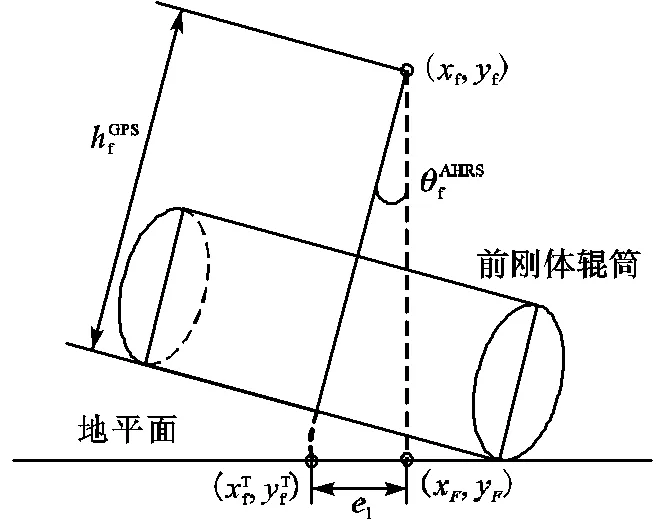
图4 姿态校正位姿解算示意
2.3 预瞄算法
针对转向和车辆航向动态变化慢的问题,设计预瞄控制算法[21],实现对方向盘转角的提前控制,以减少控制波动.预瞄算法中的位置重构方法为
2.4 距离误差计算
车辆前刚体定位点距离目标轨迹线的垂直距离计算式为


2.5 非线性误差反馈控制律

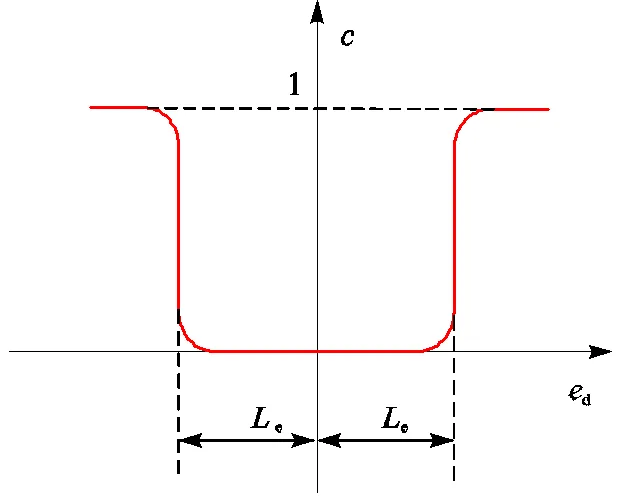
图5 非线性误差反馈控制律
2.6 距离误差控制器
控制律的计算式为

3 算法节能效果试验验证

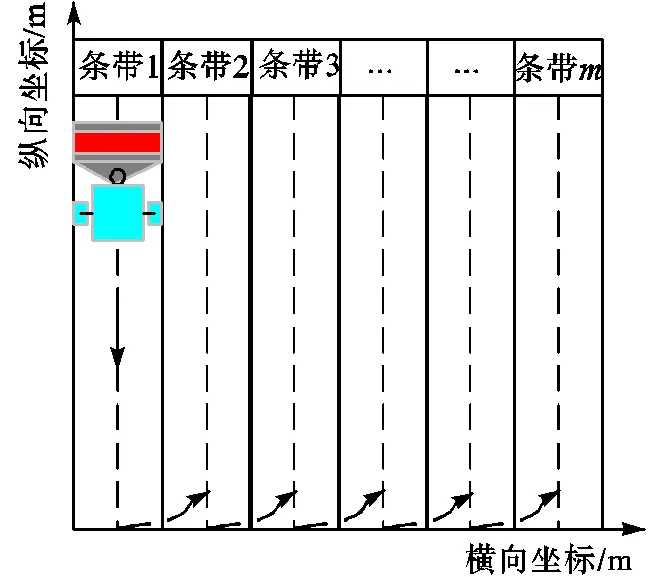
图6 无人碾压机碾压作业示意
为了研究算法的节能效果,现建立如下几个评价指标.
3.1 预瞄算法节能效果试验验证
针对不同预瞄距离的节能效果,在相同的试验轨迹上分别对预瞄距离为0m、1m、2m、3m、4m、5m、6m进行了碾压作业试验,碾压试验仓面纵向长度为100m.试验结果如下.
如图7(a)和(b)所示,预瞄算法的使用,使得控制过程超调量减小,无人碾压机运行轨迹趋于稳定收敛,轨迹误差波动降低,距离误差稳定在0.20m以内.其次,如图7(c)所示,预瞄距离为3m时与无预瞄算法相比,距离误差更为集中于小距离误差带.
如图8所示,=3m、=6m与无预瞄对比,转向电机调节的频率变快,调节的幅度降低了49.1%,验证了预瞄算法主动适应转向速度慢问题的有效性.
根据表3和图9可知,采用3m的预瞄距离可以兼顾转向电机能耗与轨迹跟踪精度,转向电机能耗较无预瞄(=0m)降低24.7%,且距离误差稳定在0.15m以内.
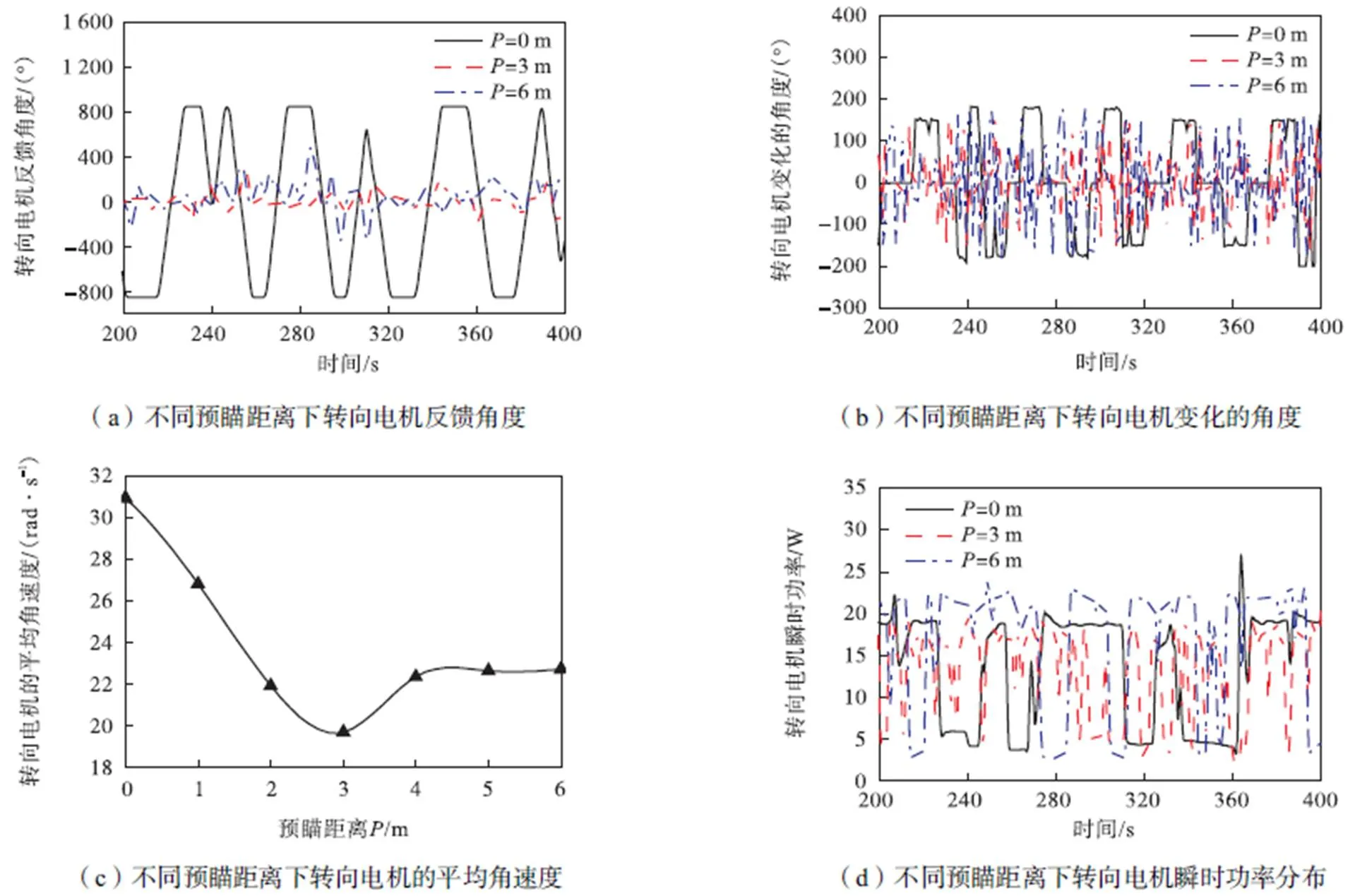
图8 不同预瞄距离下无人碾压机转向电机性能
表3 不同预瞄距离下无人碾压机轨迹跟踪控制的性能
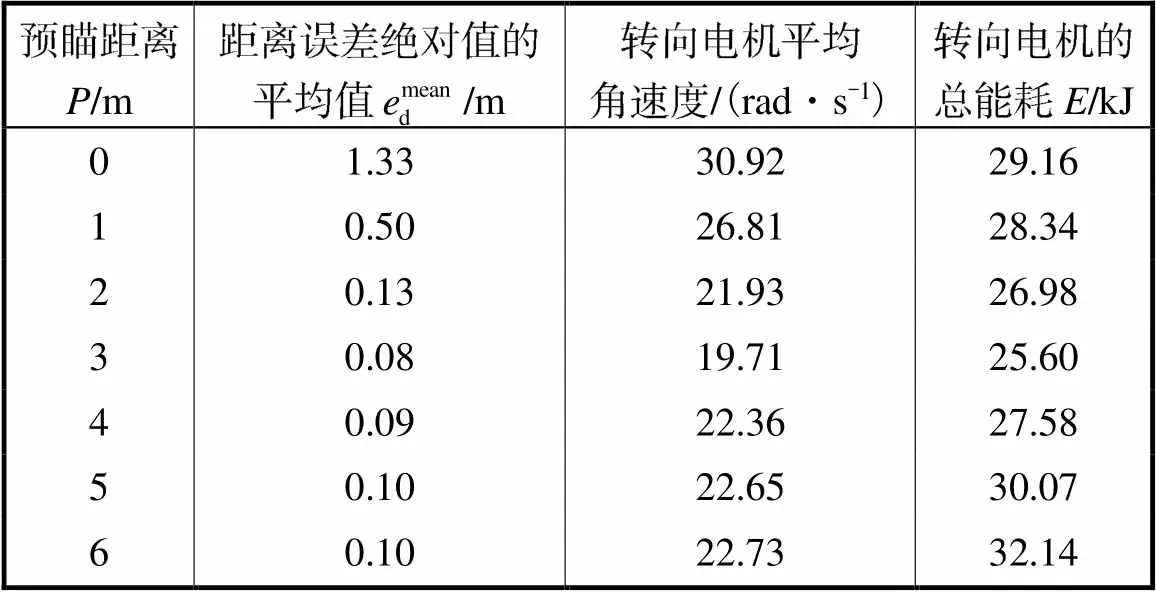
Tab.3 Path-following control performance of unmanned roller under different preview distances
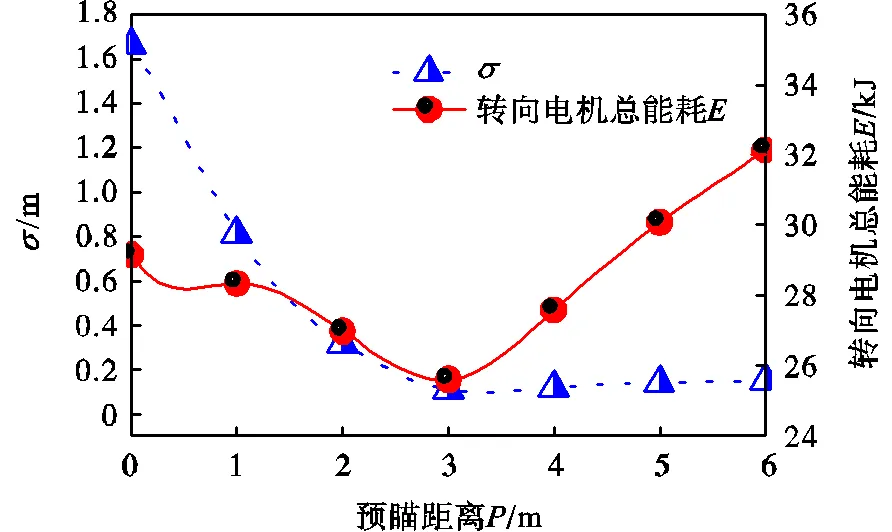
图9 不同预瞄距离下无人碾压机运行性能
3.2 姿态校正算法节能效果试验验证
为了研究姿态校正算法对无人碾压机性能改善情况,在相同试验轨迹上分别打开或关闭姿态校正算法在纵向长度为150m的碾压试验仓面上进行碾压作业.试验结果如下.
如图10所示,姿态校正算法的引入主要是对横向坐标进行了校正,即在横向运动上进行了补偿,减缓了定位坐标波动的幅度,降低了仓面起伏对定位的噪声干扰.
如图11和表4所示,姿态校正算法在对定位补偿后,距离误差的标准差提高了40.0%,距离误差绝对值的平均值减少了0.04m,整个试验周期的83.9%,距离误差都稳定在0.10m以内,转向电机小幅度调节,转向电机瞬时功率得到改善,转向电机的能耗降低了29.2%.
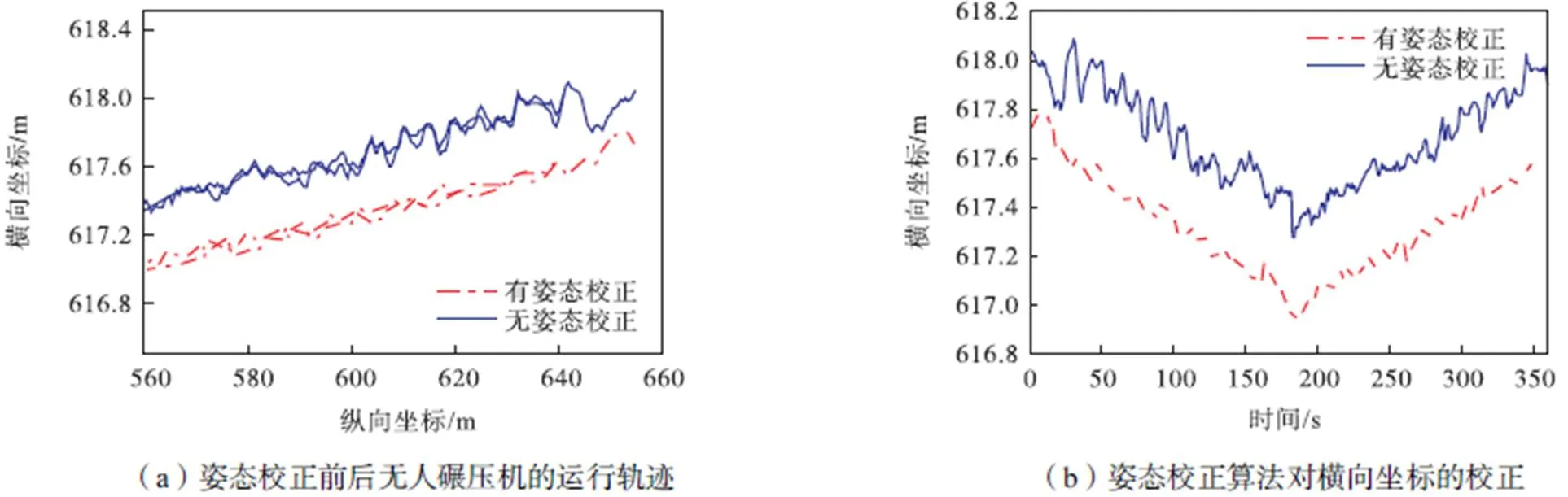
图10 姿态校正算法对定位坐标的校正
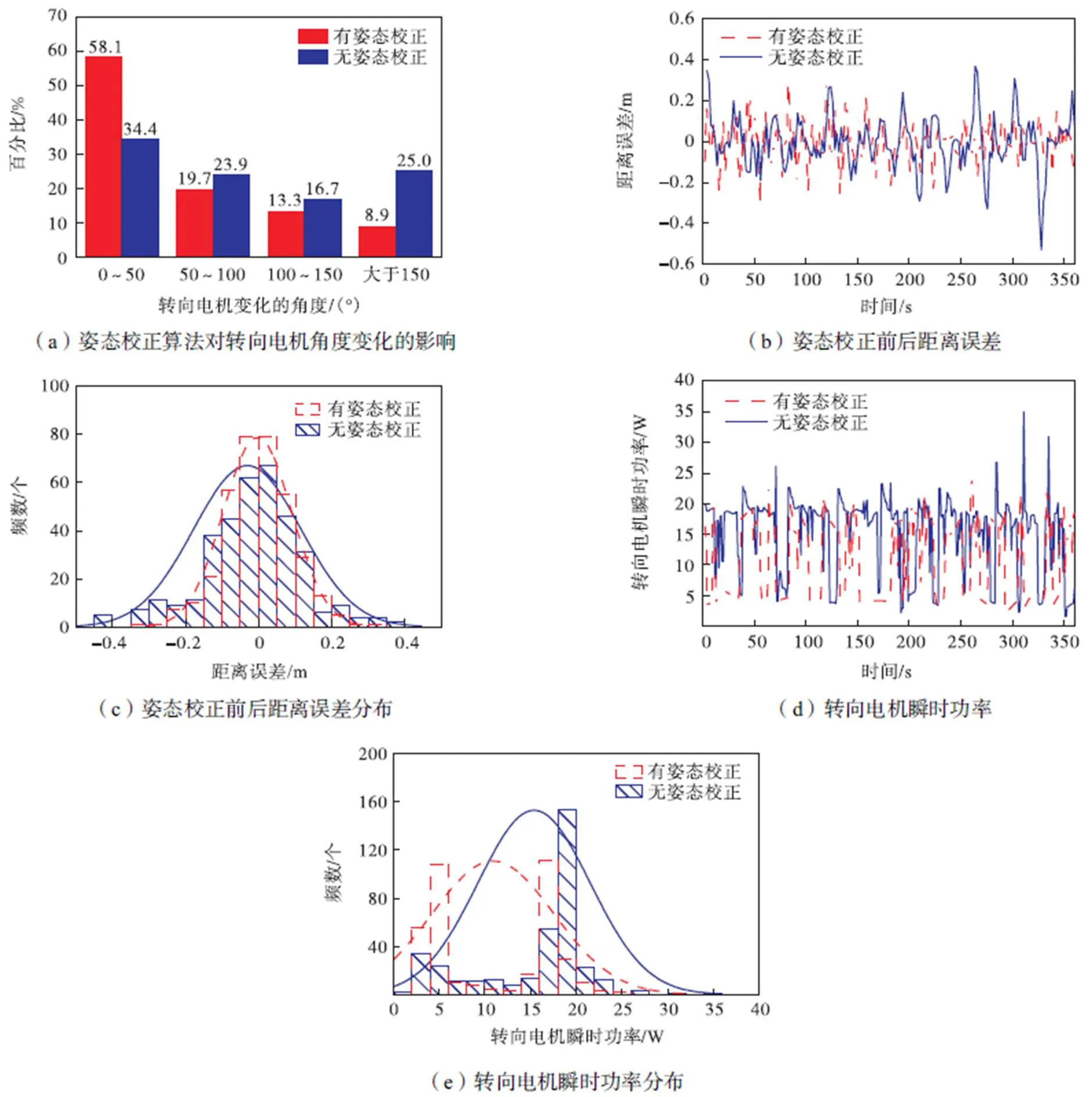
图11 姿态校正前后碾压机各项指标性能
表4 姿态校正算法对无人碾压机轨迹跟踪控制性能的影响
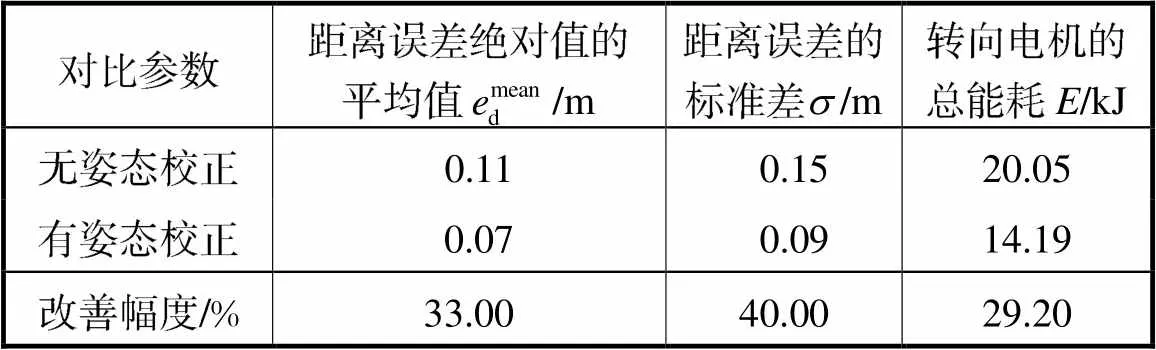
Tab.4 Influence of attitude correction controller on the path-following control performance of unmanned roller
3.3 非线性误差反馈控制律节能效果试验验证
针对非线性误差反馈控制律的节能效果,在相同试验轨迹上分别对距离死区为0m、0.03m、0.05m、0.10m、0.13m和0.18m进行了碾压作业试验,建立碾压试验仓面纵向长度为180m.试验结果如下.

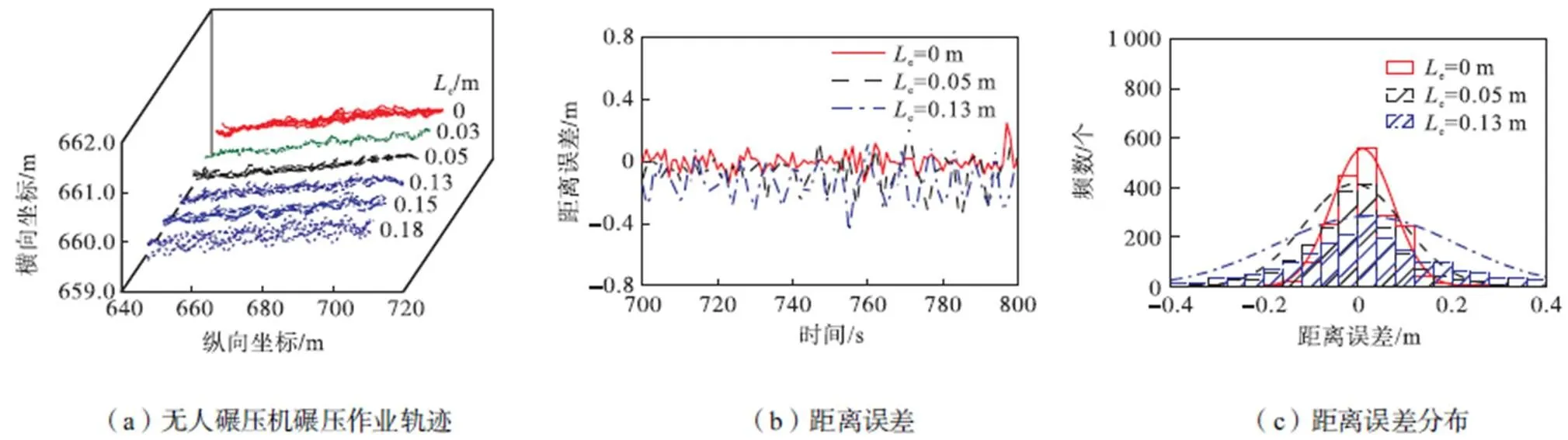
图12 不同距离死区下无人碾压机的循迹情况
表5 不同距离死区下无人碾压机轨迹跟踪控制的性能
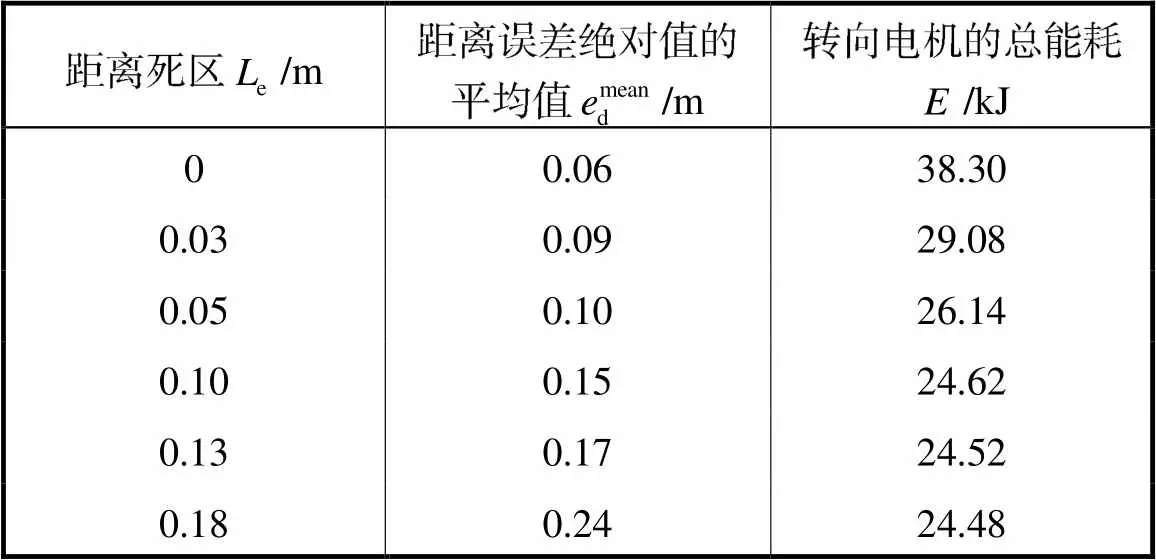
Tab.5 Path-following control performance of unmanned roller under different distances of dead zones
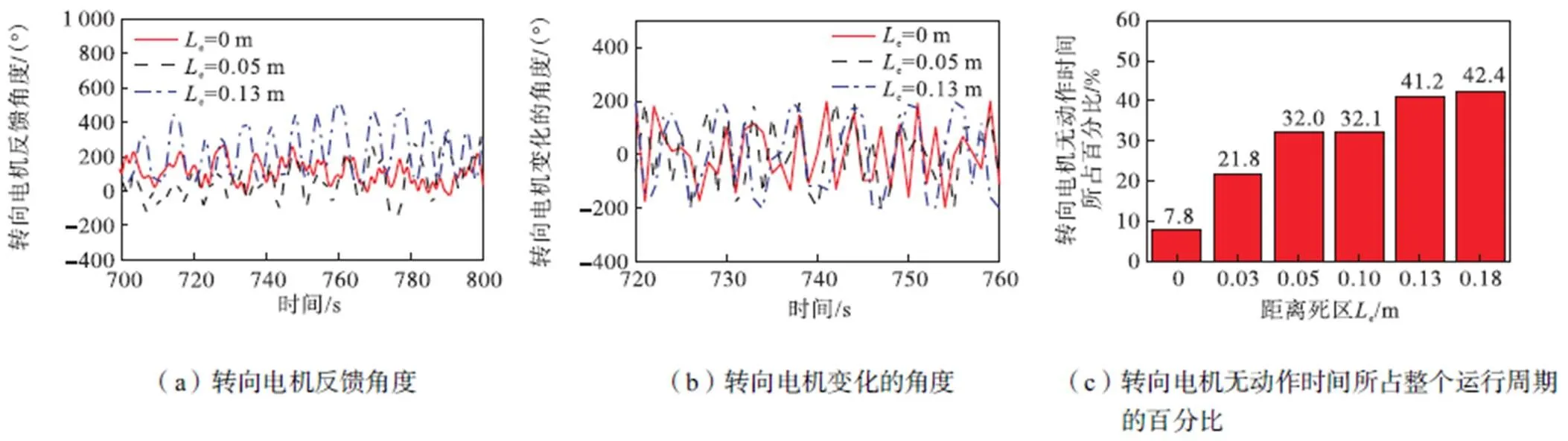
图13 不同距离死区下无人碾压机转向电机性能
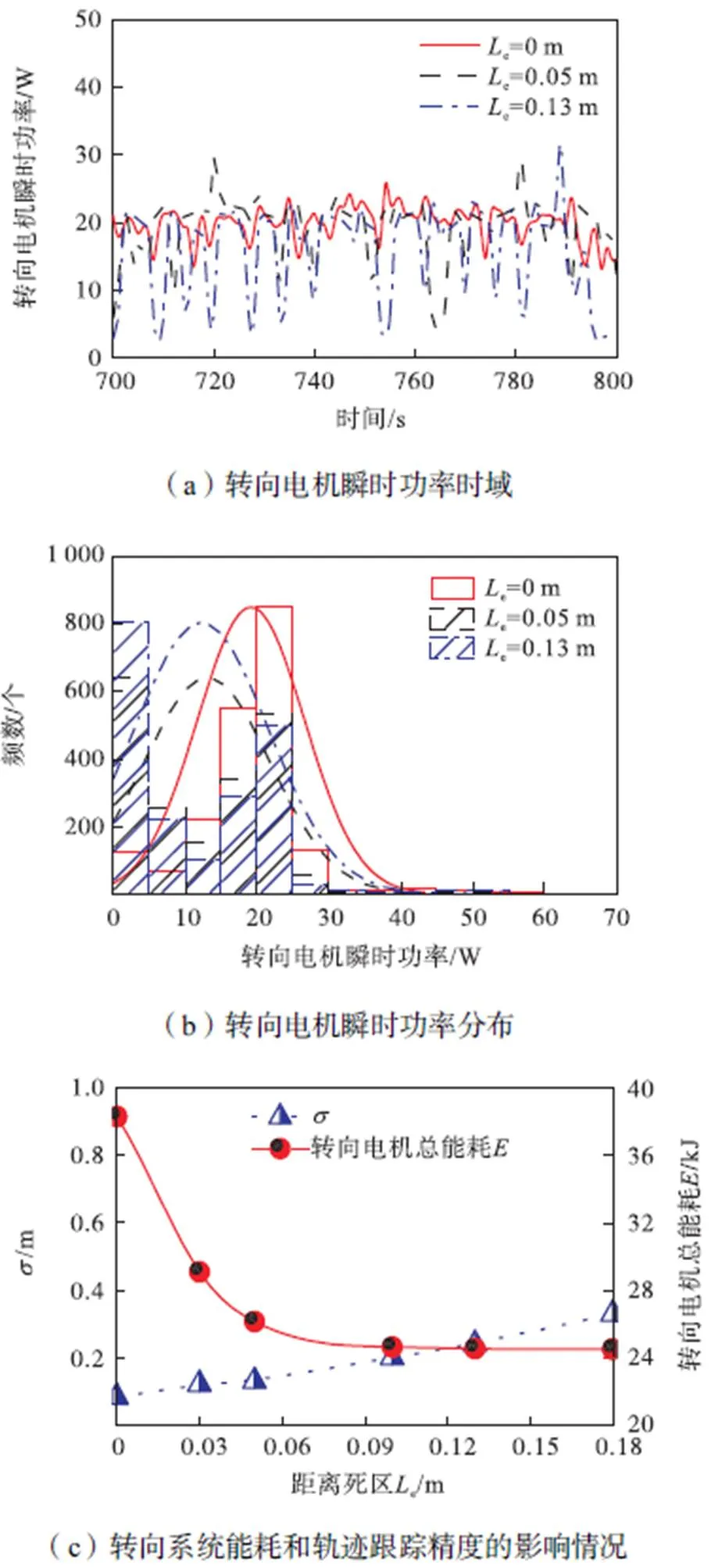
图14 不同距离死区下无人碾压机运行性能总图
4 结论和展望
本文针对典型的铰接车辆碾压机在复杂仓面上的节能控制问题进行了研究分析.首先搭建了无人碾压机运动学模型,其次,针对无人碾压机轨迹跟踪算法能耗高的问题,设计了面向节能的串级抗扰轨迹跟踪算法,通过大坝填筑现场实车试验,验证了该算法在典型铰链式车辆上的节能控制效果.结论如下.
(1) 采用预瞄算法,利用未来道路信息主动适应转向速度慢的问题,通过优化预瞄距离,转向系统电能消耗比无预瞄的标称控制器降低了24.7%,且能够使得距离误差稳定在0.15m内.
(2) 采用姿态校正算法,消除了位置和方位测量中的噪声干扰,同时可以消除碾压机在大岩石上或在有斜坡的道路上压实时,碾压机的摆动而引起的定位偏差问题,从而降低29.2%的转向系统能量消耗,距离误差降低了33.0%.
(3) 通过使用非线性误差反馈控制律,降低方向盘在小距离误差带内的高频波动,可以在距离误差无明显恶化(0.06m以内)的情况下,将转向系统的能耗降低31.8%.
最后,本文的研究内容主要关注车辆转向系统的能耗,尚未涉及整车的能耗分析.因此,后续的研究工作将会结合铰接式车辆的整车动力学开展进一步分析,评估控制算法对整车能耗的影响规律.
[1] Zhang Q,Liu T,Zhang Z,et al. Unmanned rolling compaction system for rockfill materials[J]. Automation in Construction,2019,100:103-117.
[2] Gao Y,Cao D,Shen Y. Path-following control by dynamic virtual terrain field for articulated steer vehicles[J/OL]. Vehicle System Dynamics,https://doi. org/10. 1080/00423114. 2019. 1648837,2019-09-31.
[3] Zhang Y,Khajepour A,Hashemi E,et al. Reconfigurable model predictive control for articulated vehicle stability with experimental validation[J]. IEEE Transactions on Transportation Electrification,2020,6(1):308-317.
[4] Liu S,Hou Z,Tian T,et al. Path tracking control of a self-driving wheel excavator via an enhanced data-driven model-free adaptive control approach[J]. IET Control Theory & Applications,2020,14(2):220-232.
[5] Uzunsoy E,Erkilic V. Development of a trajectory following vehicle control model[J]. Advances in Mechanical Engineering,2016,8(5):1-11.
[6] Khalaji A K. PID-based target tracking control of a tractor-trailer mobile robot[J]. ARCHIVE Proceedings of the Institution of Mechanical Engineers Part C:Journal of Mechanical Engineering Science,2019,233(13):4776-4787.
[7] Fang X,Bian Y,Yang M,et al. Development of a path following control model for an unmanned vibratory roller in vibration compaction[J]. Advances in Mechanical Engineering,2018,10(5):1-16.
[8] 邵俊恺,赵 翾,杨 珏,等. 无人驾驶铰接式车辆强化学习路径跟踪控制算法[J]. 农业机械学报,2017,48(3):376-382.
Shao Junkai,Zhao Xuan,Yang Jue,et al. Reinforcement learning algorithm for path following control of articulated vehicle[J]. Transactions of the Chinese Society of Agricultural Machinery,2017,48(3):376-382(in Chinese).
[9] Khalaji A K,Jalalnezhad M. Control of a tractor-trailer robot subjected to wheel slip[J]. Proc IMechE Part K:J Multi-Body Dynamics,2019,233(4):956-967.
[10] Erkan K,Wouter S,Herman R,et al. Experimental validation of linear and nonlinear MPC on an articulated unmanned ground vehicle[J]. Transactions on Mechatronics,IEEE/ASME,2018,23(5):2023-2030.
[11] Nayl T,Nikolakopoulos G,Gustafsson T,et al. Design and experimental evaluation of a novel sliding mode controller for an articulated vehicle[J]. Robotics and Autonomous Systems,2018,103:213-221.
[12] Yue M,Wu X,Guo L,et al. Quintic polynomial-based obstacle avoidance trajectory planning and tracking control framework for tractor-trailer system[J]. International Journal of Control Automation and Systems,2019,17(3):2634-2646.
[13] Bian Yongming,Yang Meng,Fang Xiaojun,et al. Kinematics and path following control of an articulated drum roller[J]. Chinese Journal of Mechanical Engineering,2017,30(4):888-899.
[14] Xu Quanzhi,Song Kang,Xie Hui. The impact of control structure on the path-following control of unmanned compaction rollers[C]//SAE 2019 Intelligent and Connected Vehicles Symposium. Paris,France,2020:2020-01-5030.
[15] Nayl T,Nikolakopoulos G,Gustafsson T. Switching model predictive control for an articulated vehicle under varying slip angle[C]// 2012 20th Mediterranean Conference on Control & Automation. Barcelona,Spain,2012:884-889.
[16] Yang M,Bian Y M,Liu G J,et al. Path tracking control of an articulated road roller with sideslip compensation[J/OL]. IEEE Access,DOI:10.1109/ACCESS.2020. 3008455,2020-09-20.
[17] Corke P,Ridley P. Load haul dump vehicle kine-matics and control[J]. Journal of Dynamic Systems Measurement & Control,2003,125(1):54-59.
[18] Iida M,Fukuta M,Tomiyama H. Measurement and analysis of side-slip angle for an articulated vehicle[J]. Engineering in Agriculture Environment & Food,2010,3(1):1-6.
[19] 谢 辉,赵龙同,阮迪望. 智能振动碾压机的自抗扰循迹控制方法[J]. 天津大学学报:自然科学与工程技术版,2020,53(9):900-909.
Xie Hui,Zhao Longtong,Ruan Diwang. Path following control method with active disturbance rejection for an intelligent vibration roller[J]. Journal of Tianjin University:Science and Technology,2020,53(9):900-909(in Chinese).
[20] 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程,2002(3):13-18.
Han Jingqing. From PID technique to active disturbances rejection control technique[J]. Control Engineering of China,2002(3):13-18(in Chinese).
[21] 孟 宇,甘 鑫,白国星. 基于预瞄距离的地下矿用铰接车路径跟踪预测控制[J]. 工程科学学报,2019,41(5):662-671.
Meng Yu,Gan Xin,Bai Guoxing. Path following control of underground mining articulated vehicle based on the preview control method[J]. Chinese Journal of Engineering,2019,41(5):662-671(in Chinese).
Path-Following Algorithm and Energy Consumption Law of Unmanned Roller
Du Xu,Song Kang,Xie Hui
(School of Mechanical Engineering,Tianjin University,Tianjin 300072,China)
The unmanned roller is an important technique to reduce the burden of manual work and improve the quality and efficiency of rolling operation. However,because of the high tonnage,high steering resistance,and frequent working on complex unstructured road surfaces,the energy consumption of the conventional vehicles’path-following algorithms is usually high,which affects the power balance,reliability,and comprehensive energy efficiency of the control system. Hence,an energy-saving cascade disturbance rejection path-following algorithm is proposed for an unmanned roller running on a hydropower dam. At the same time,the influence of the algorithm on the energy consumption of the steering system of the unmanned roller is studied. First,a position preview algorithm is used to control the steering system in advance to reduce the overshoot caused by the heavy load and to reduce energy consumption. Second,a vehicle body attitude correction algorithm is proposed to resolve the problem of disturbances in the vehicle caused by road surface undulation. By measuring the roll angle of the front and rear body of the unmanned roller compactor,the positioning results are corrected to reduce the noise interference and energy consumption. Finally,to reduce the high-frequency fluctuation of the steering wheel in the small range error band,a nonlinear error feedback control law is used to save energy in the steering system. A real vehicle test was conducted at the hydropower dam’s construction site. The results show that:①Compared with the nominal controller without preview,the optimized preview distance can reduce the energy consumption of the steering motor by 24.7% and make the path-following accuracy stable at ±0.15m;②Using the attitude correction algorithm,the energy consumption of the steering motor can be reduced by 29.2% and the path-following accuracy can be improved by 33.0%;③Using nonlinear error feedback control law,the energy consumption of the steering motor can be reduced by 31.8% without the usual deterioration of distance error(within 0.06m).
unmanned roller;path-following;energy consumption optimization control;preview algorithm;attitude correction
TP242.6
A
0493-2137(2021)08-0834-10
10.11784/tdxbz202009082
2020-09-28;
2020-12-09.
杜 续(1994— ),男,硕士研究生,arcgerald@163.com.
宋 康,songkangtju@tju.edu.cn.
天津市人工智能科技重大专项资助项目(19ZXZNGX00050).
Supported by the Science and Technology Major Project on Artificial Intelligence of Tianjin,China(No. 19ZXZNGX00050).
(责任编辑:金顺爱)
