低成本复杂环境下高精度单波束测深系统的设计与实现
2021-04-25翟信德刘俊文
翟信德,王 宇*,刘俊文
(1.长江南京航道局,江苏 南京 210011;2.江苏中海达海洋信息技术有限公司,江苏 南京 211800)
自单波束测深仪面世以来,如何提升其测量精度广受关注,已有较多成果,RTK三维水深测量方式可以解决部分精度问题[1-2]。因RTK水深测量时对于卫星信号的接收条件要求较高,当出现信号遮挡、干扰情况时,流动站无法获得固定解。随着长江江苏段已建、在建、拟建和重点规划的过江通道数量不断增加[3],桥梁区域水下地形测量时受桥梁遮挡、电磁波干扰的影响,水下地形测量定位时常受到影响,造成桥区下方测量留有空白。目前,已有较多专家、学者对上述问题开展研究,并使用传统高精度的惯性导航系统和单波束测深仪结合,可以解决上述部分问题[4-10],但使用高精度惯导系统的成本高,可推广性不足;随着技术的不断发展,中级惯性传感器性能越来越稳定,成本也越来越低。本文提出了一种使用辅助的姿态传感器,确保卫星失锁状态下测量成果的精度。在RTK受遮挡无法获取固定解情况下,水下地形测量需要同时获取船舶吃水信息。惯导系统配合使用压力式传感器,可提升卫星信号失锁状态下定位精度。
1 系统技术设计
本文为解决上述两大技术难题,使用中等精度、低成本组合惯导系统为测深仪提供厘米级定位数据、0.1°精度航向数据和高精度姿态数据,在GNSS信号受到严重干扰、导致无法定位的复杂环境下仍然能提供定位航向姿态数据。同时,将压力传感器技术应用于测深仪动态吃水值的计算,实现了全自动和连续实时的测深仪动态吃水值的读取,降低了人为干扰和动态吃水对测量精度的影响,从而提高了水下地形测量的精度。本文主要研究内容包括:(1)研究利用惯性导航技术,为水下地形测量提供连续位置信息,解决长江上桥梁、跨江电缆等障碍物对卫星信号遮挡干扰,导致卫星失锁无法定位问题;(2)研究利用现代传感技术,结合压力传感器,解决测深设备入水深度改正难题,实时获取测深仪换能器距离水面高度,从而提高测深精度。
1.1 系统简介
惯性传感器(IMU)是可以检测加速度与旋转运动的传感器。基础的惯性传感器包括加速度计与角速度计。本文主要讨论基于MEMS的六轴惯性传感器,主要由3个轴加速度传感器以及3个轴的陀螺仪组成。
MEMS惯性传感器分为3个级别:低精度惯性传感器作为消费电子类产品主要用于智能手机,此类传感器售价在50美分到几美元不等,但是测量的误差会比较大。中级惯性传感器主要用于汽车电子稳定系统以及GPS辅助导航系统,此类传感器售价在几百到上千美元。相对于低端惯性传感器,中级惯性传感器在控制芯片中对测量误差有一定修正,所以测量结果更加准确,但是长时间运行后,累计的误差也会越来越大。高精度的惯性传感器作为军用级和宇航级产品,要求高精度、全温区、抗冲击等指数,主要用于通讯卫星无线、导弹导引头、光学瞄准系统等稳定应用。此类传感器售价在几十万美元区间,即便经过长时间运行后,仍然可以达到米级精度,比如跨太平洋洲际导弹。
无人车使用的一般是中低级的惯性传感器。其特点是更新频率高(1 kHz),可以提供实时位置信息。但是惯性传感器的致命缺点是它的误差会随着时间的推进而增加,所以只能在较短时间内完全依赖惯性传感器进行定位。
1.2 系统技术路线
图1为系统组建方案图。
如图1所示,将惯导系统和压力式水位计应用于测深系统。惯性导航模块用于船载定位导航,主要用于GNSS信号受到严重干扰导致无法定位的复杂环境下提供高精度定位姿态数据。惯导通过GNSS主天线和从天线接入GNSS信号,GNSS主天线作用是定位,从天线作用是定向;再接入由CORS 或基准站提供的RTCM3.2格式的差分信号,结合内部传感器,通过深度耦合算法,在有无GNSS信号的情况下,均能输出GINS定位语句,并将语句接入测深仪工控机,由测深软件进行组合计算。压力传感器通过设置特殊固件,使水位计能实时动态输出高精度的吃水数据,通过测深软件进行识别、读取、存储并参与计算。
2 系统安装与实现
2.1 惯导系统
2.1.1 设备安装 惯导应固定安装,为了达到更好的惯导效果,推荐最佳的安装位置是位于船体中轴线上,并且让惯导模块远离热源、振动源,如发动机、电机等。天线安装方式是将主、从天线安装在船体的左右两侧,即主、从天线连线与船体前进方向垂直,并且主天线在左,从天线在右的位置安装。为了达到更好的航向精度,推荐主从天线摆放距离大于1 m。惯导主机采用12 V直流电源供电,与测深系统可以共用一个直流电源。采用RS232口输出组合惯导GINS语句,包含定位、航向、姿态、速度等多种定位和姿态信息,可以直接接入测深仪使用。
2.1.2 系统软硬件连接 惯导语句接入测深仪软件中之后,软件从语句中提取出来导航信息,用于和测深仪数据进行匹配,由于测深数据频率比定位数据要高,可以通过线性插值算法,见式(1):

通过内插出所有位于测深点的平面坐标(x,y),其中(x1,y1)和(x2,y2)分别代表当前位置前后时间点GNSS输出的位置值的平面坐标,这样可以提高匹配精度,不容易造成测深数据与定位数据的延迟。软件从语句中提取出来姿态信息之后,同样可以先用内插算法,算出位于测深数据时间点上的姿态信息,再通过姿态融合算法,采用左手定则,依次代入横摇和纵摇,对参考点进行位置上的改正。但是这里需要注意的是,由于用的是惯导加水位计的方式,实际上水位计已经对水深数据经过了改正,涌浪数据不应再参与解算。
2.2 压力式水位计
压力式水位计包括压力传感器及有关的引压、信号传输、数据处理(含存贮、编码和记录)等装置。采用静压液位测量原理,中央处理单元实时采集压力传感器、温度传感器,并在内部运用复杂算法对压力传感器数据进行线性修正和温度补偿,从根本上保证了产品的稳定性和精度;实时动态输出5 Hz的高密度吃水数据,并输出到测深仪工控机中,和测深仪测深数据自动匹配,得到实时的水深值,配合潮位计算得到高精度的水深。
3 系统测试
3.1 定位精度测试
为进一步检验惯导的精度,比测了惯导系统和GNSS设备,进行失锁符合精度测试,测线分3段,分别为直线和弯曲航线。
惯导在3段航线中完全遮挡GNSS信号,进入纯惯导推算状态提供定位和姿态信息。作为比测使用GNSS接收机全程接收信号,提供固定解定位信息。3段航线完全遮挡时间为40 s,在遮挡期间内,惯导只能依靠内部传感器计算定位信息。(日常航道测量中经过大桥等失锁区域遮挡时间一般为10 s左右)。
为保证测试的准确性,将惯导的输出坐标和比测用GNSS的坐标均归算到测深仪换能器所在位置,测试采用相同的CORS信号和坐标转换数据。测试步骤如下:
(1)安装连接:将惯导固定在船舱,将两个天线用磁吸盘固定在船顶前后两端,分别连接到惯导辅助天线和主天线接口,由12 V电瓶连接电源线供电。接入CORS提供差分信号,由RS232输出数据至测深软件,并采用模拟水深数据记录采集数据。
(2)惯导标定臂杆参数:仪器首次安装或者移动过位置后,需要进行臂杆参数的标定。首先量取主从天线至IMU中心位置的偏距,并输入系统,发送命令进入标定模式,标定模式分两步,首先在静止环境下获取参数,然后进动态跑圈标定和优化参数,再在长江江面上按照一定的速度匀速航行后完成标定,自动进入导航模式。
(3)导航模式下模拟失锁:进入导航模式后,静止1~2 min等待惯导初始化,由人为模拟测试船通过大桥下的整体状态,并按照一定的时间进行直线及弯曲测线进行比对。
将比测使用的GNSS数据导入Excel,作为外符合比测标准,将惯导失锁状态下纯IMU推算数据作为对比数据和GNSS定位数据进行对比如表1和表2所示。
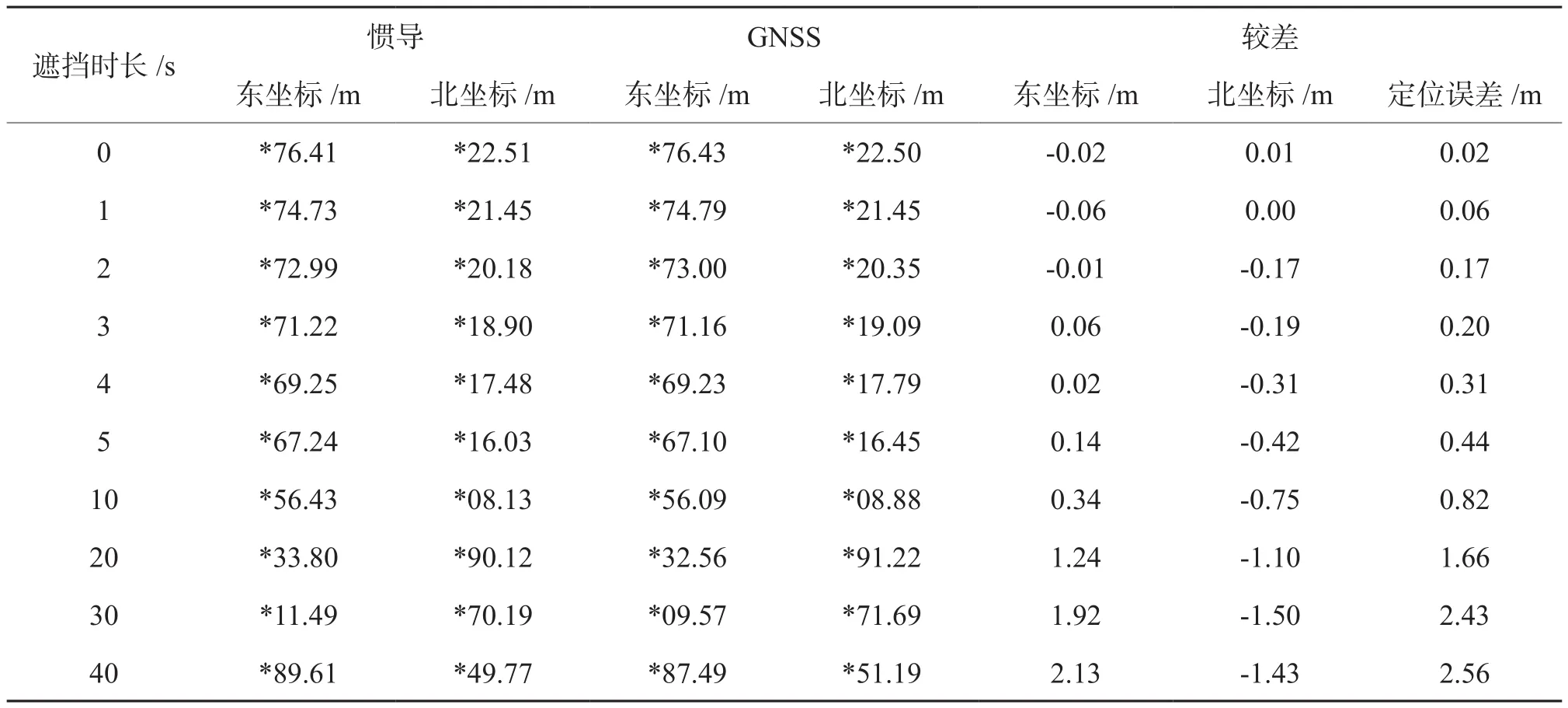
表1 直线定位误差表
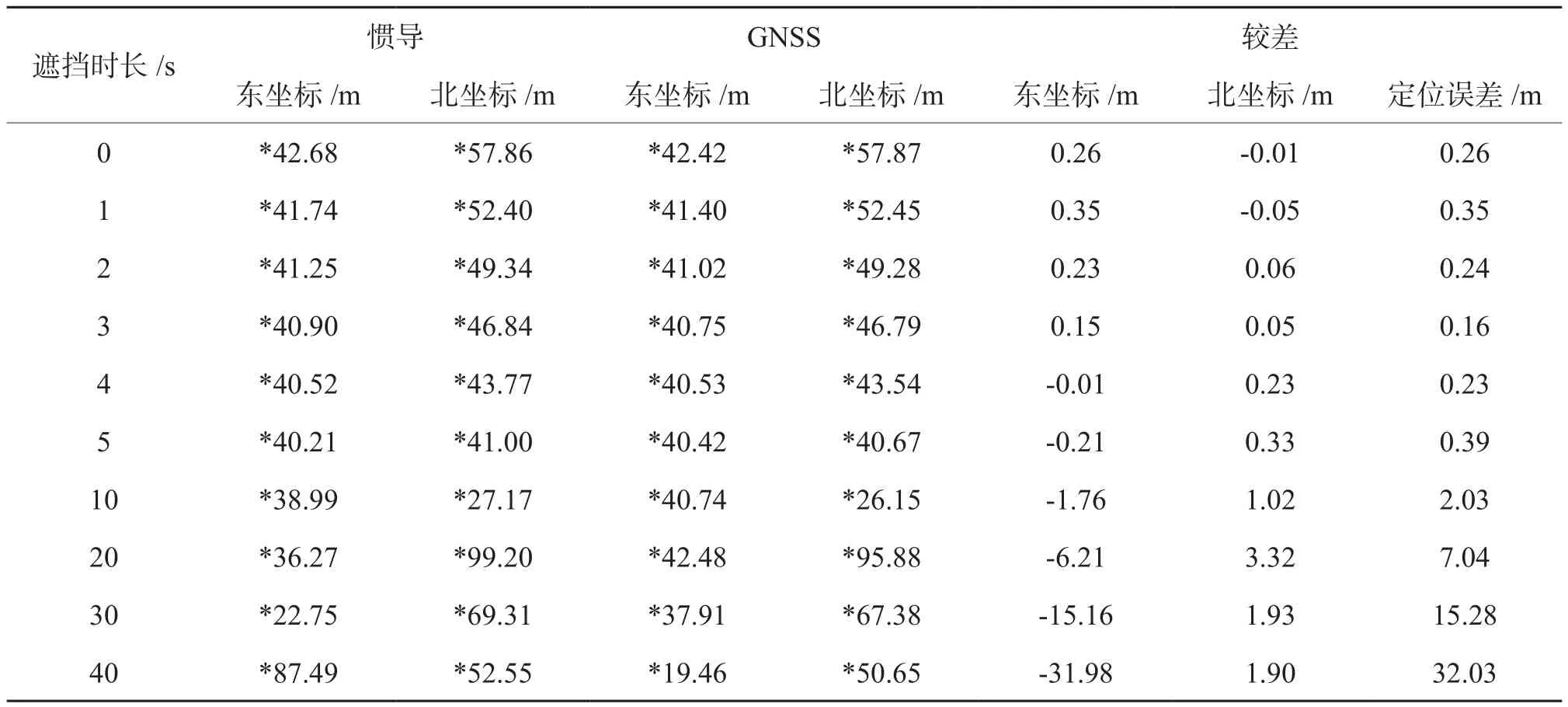
表2 第二段曲线定位误差表
综上所述,通过实测比测,可以得出结论:在未失锁环境下惯导可以完全替代一般GNSS。而在极端失锁环境下,一般GNSS完全失锁,无法提供定位信息。惯导仍然可以提供一定精度的定位信息。
在直线航行时,失锁5 s时,平面定位误差为0.44 m;在失锁10 s时,产生的平面定位误差为0.82 m;在失锁15 s时,产生的平面定位误差1.20 m,详细比较数据见表1。在弯曲航行时,在失锁5 s时,产生的平面定位误差为0.39 m;在失锁10 s时,产生的平面定位误差为2.03 m;在失锁15 s时,产生的平面定位误差4.37 m,曲线精度略低于直线精度,详细比较数据见表2。
3.2 水深数据测试
将水位计放置于静态放置于水池中,通过卷尺测得水深作为比测标准,检验水位计输出的吃水值精度,如图2所示。
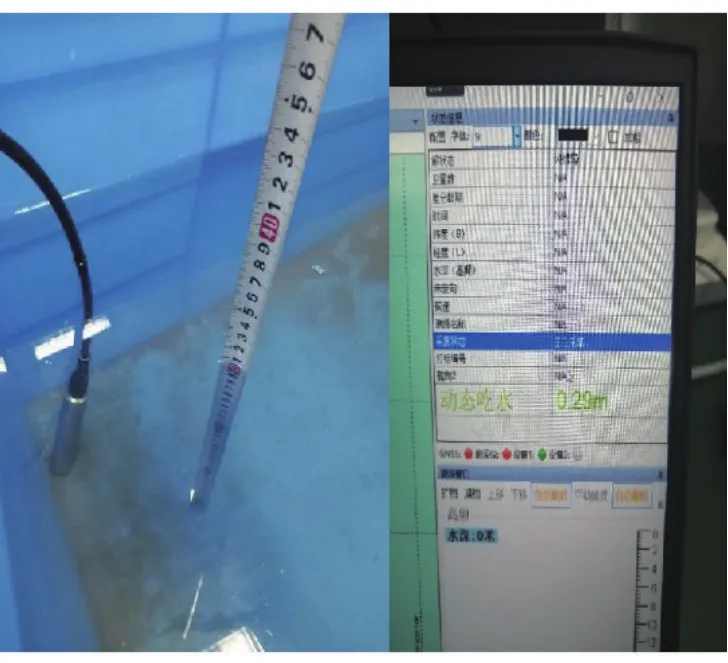
图2 压力式水位计验证结果
图2左图为卷尺测量水位计实际吃水值,右图为压力式水位计实际读取的动态吃水值。由图2可知,水位计的输出吃水值为0.29 m,卷尺的水位计读数为0.306 m,对比误差在1.6 cm,符合《水运工程测量规范》(JTS 131-2012)中关于深度对比互差限值的要求。
在RTK信号遮挡的时候,RTK验潮数据不够准确,此时可用压力传感器进行动态吃水接入,结合潮位站的数据,可以得到较为精确的测量结果。正常情况下水深计算公式如下:

式中:H为最终计算水深;Depth为换能器测量水深;Draft为测量吃水值;Heave为实时涌浪。用水位计替代之后,实际水深计算公式如下

式中:ΔDraft为压力传感器测量值,即动态吃水。
可以通过室内模拟来得到验证结果,假设一个平静的水面,如图3所示,设置水深为23.5 m,水位计测量的动态吃水为0.51 m,最终在后处理显示的水深为24.01 m。
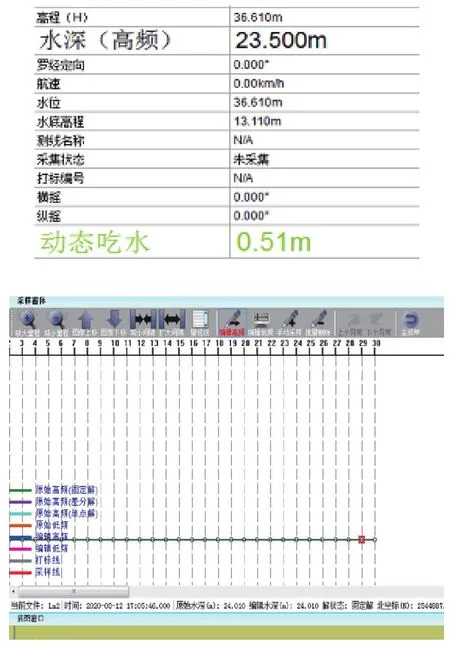
图3 压力式水位计接入结果和后处理界面显示实际水深结果
4 结 论
本文将自动驾驶惯性导航系统和压力式水位计结合,用于辅助单波束水深测量。经测试,惯导系统可以在GNSS信号失锁情况下,一定时间内保持定位精度,可以显著提高测量效率,解决了GNSS接收机在高大建筑物下方无法精确定位的问题;压力式水位计可以精确量取换能器吃水值,从而实获取换能器动态吃水。当RTK卫星信号受到遮挡或者干扰时,惯导系统不间断提供定位数据,压力式传感器获取吃水数据,使单波束测深仪能够正常进行测量,提高测量精度,避免了测量数据错漏的返工,提升了工作效率。本文使用的中等精度惯导系统和压力式传感器均可以较低价格配置,具有低成本、兼顾高精度的特点,可大规模推广,从而提升单波束水深测量的整体精度。
