可抛弃式水动力监测微型浮标设计
2021-04-25万隆君徐轶群
胡 颖,万隆君,2*,徐轶群,2
(1.集美大学 轮机工程学院,福建 厦门 361021;2.集美大学 福建省船舶与海洋工程重点实验室,福建 厦门 361021)
近海小尺度表层流水动力学参数可帮助人们了解赤潮扩散[1]、泥沙运移机制等自然现象[2-3],也可追溯海洋垃圾和污染物排放源头,评估海洋污染,监测养殖环境[4],提高渔民捕捞效率,快速寻找失水人员实施救助等[5]。本论文研究了一种可抛弃式水动力监测微型浮标,通过一定数量的放置,随海流同步漂移,周期性将位置、流速和浪高等数据通过自组网传送到岸端大数据公共服务平台,对开展表层水动力学研究具有重要的意义[6-7]。
目前,大多数海洋移动观测平台采用卫星通信和GPRS通信方式。李文彬等[8]在2011年设计了基于新一代Argos卫星的表层漂流浮标;张少永等[9]在2014年设计了基于北斗系统的C-Argo浮标;孔佑迪等[10]在2015年设计了基于铱星通信应用于海洋环境在线监测的漂流浮标。Argos系统数据传输的实时性差,需卫星过顶后才能传输数据;北斗系统数据传输的实时性和安全性有所提高,但通信范围受限,在一些偏远海域,运营商基站无法覆盖的区域无法通信;铱星通信覆盖面广、传输速率高,但通信成本高。一些浮标采用GPRS通信方案实现远距离数据的传输,但GPRS模块功耗大,且按照流量计费[11]。在结构方面,海洋表面漂流浮标主要由标体和水帆组成,目前学者的研究主要集中在浮标结构的优化以及水帆材料的改进。王鹏等[12]在2017年设计了一种浮标体为葫芦型的表层漂流浮标,减少浮标体对水帆运动的影响;张继明等[13]在2018年对浮标结构进行优化,提高了浮标的稳性和耐波性,但浮标体积重量较大,无法一次性大量布放,采集精度低,且回收困难。
近年来,测流方式主要有浮标法和流速仪法。传统的浮标法测流是通过人工记录浮标漂浮相隔定点距离所需的时间,按照直线距离计算,但浮标在实际运动过程中受到风速水速的影响轨迹并不是直线,计算距离和实际距离之间存在误差,且由于人工记录,受人脑反应时间影响,存在较大误差[14];传统的机械式流速仪属于单点式测量仪,只能采集固定点的流速,近年来多采用ADCP(多普勒流速剖面仪)测流,ADCP可以测量其所处位置垂直剖面的多个测量点的流速,其测流方式有固定式和走航式,固定式只能测量某一固定位置垂直剖面的流速,测量范围受限,而走航式是将ADCP固定在船上,随着船的运动轨迹测流,流速测量值受到船速的影响,且无法反应海流的流向[15]。
为了解决现有浮标通信成本高、功耗高、传输距离受限以及以往测流方式无法在反映海流流速、流向的同时精细化采集海流流速等问题,本文设计并制作了基于窄带物联网LoRa机制无线传输可抛弃式、不回收水动力监测微型浮标。文中运用Ansys Workbench对浮标水动力特性进行仿真研究,优化结构,提高浮标的稳定性;还通过仿真和水槽实验对比分析,确定浮标的最优舵叶尺寸。实验证明,可抛弃式微型浮标对海洋表层流研究具有实际应用价值。
1 带减摇鳍和舵叶的微型浮标设计
1.1 结构设计
浮标法测流的核心是以浮标的流速和流向表征海表的流速和流向。通过对浮标体结构进行优化,增强微型浮标漂流的稳定性,使浮标体能较好地反映海洋表层流水动力学参数。增加减摇鳍结构,防止微型浮标随着海流运动出现大范围的晃动,改变天线的方向,影响信号的接收与发送。鳍状结构增大浮标体表面与海水表面的接触面积,从而增加浮标与流体间的摩擦力,使可抛弃式微型浮标能在海中稳定地漂流。同时,为了减轻微型浮标在随海流运动时大幅度旋转对测流精度的影响,增加了舵叶结构。如图1所示,在迎流面,平行水流与附加水流方向相反,流速减小,压力增加,而背流面的平行水流与附加水流方向相同,所以流速增加,压力减小,舵叶两面产生压力差,舵叶受到平行于水流的舵阻力Pd和垂直于水流方向的舵升力Pl,其合力P同时可以分解为垂直于舵叶剖面的舵压力Pn和平行于舵叶剖面的舵叶摩擦力Pt,在舵压力作用下会使浮标产生回转力矩,一定程度上减轻浮标的旋转程度。

图1 舵叶受力分析图
如图2所示,可抛弃式微型浮标由上下两部分组成,通过螺栓连接和密封。根据通信定位模块、天线、电池等尺寸确定浮标总高为150 mm,最大外径为140 mm,微型浮标具体尺寸如图3所示。可抛弃式微型浮标顶部配有天线,天线伸出壳体,增强信号强度。浮标体上半部分内置北斗定位模块和LoRa通信模块。浮标体下半部分内置电池和配重块。配重块可以减小浮标体水面以上结构的体积和重量,降低浮标重心的高度。

图2 可抛弃式水动力监测微型浮标三维模型
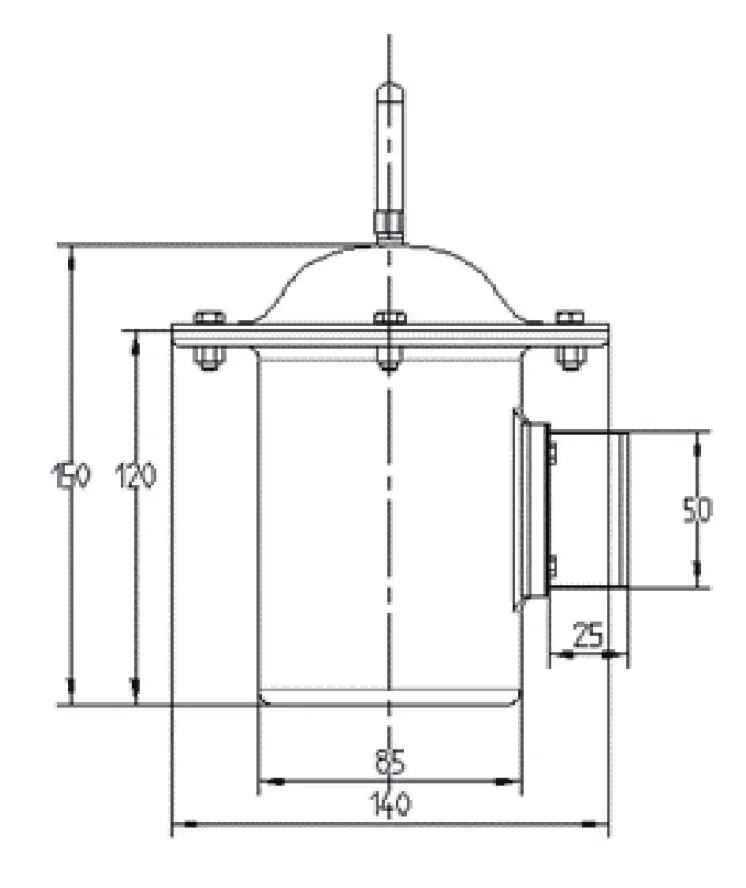
图3 可抛弃式水动力监测微型浮标结构尺寸图
1.2 电源配置
可抛弃式微型浮标通过配置电源来满足发送信号周期为2 min,连续工作1个月。已知电源提供3.7 V稳压,通过实测得到浮标发送数据期间电流为120 mA,待机时电流为20 μA,根据目前传输的数据量,每次发送数据的时间约为2.5 s。
浮标发送1 h数据的功耗为:

连续供电1个月,至少需要蓄电池容量为:

考虑休眠时间耗电,所以选用3 000 mAh的蓄电池。
1.3 工作性能指标
浮标的工作性能指标如表1所示。

表1 可抛弃式微型浮标工作性能指标
2 基于窄带物联网LoRa机制和北斗定位的微型浮标通信网络设计
窄带物联网LoRa机制是一种长距离无线通信自组网络,LoRa通过线性扩频调制技术,保证低功耗的同时增加了通信距离;无需额外通信费用,大幅降低了通信成本[16];LoRa模块能实现毫秒级计时[14],浮标采用GPS/北斗双模定位,测速精度可达0.1 m/s,与传统浮标法相比采集精度更高。LoRa采用433 MHz频点组网,由基站和终端(浮标)构成,如图4所示。基站包括海面漂浮基站、岛上基站、岸标基站以及船上基站。每个浮标都安装了LoRa终端模块,构成了传感网络,一个基站通信能力可以覆盖半径20 km,终端与终端之间、终端与基站之间通过通信接力组建mesh网络架构,通过路径优化可以实现半径100 km以上的海域无线通信覆盖。
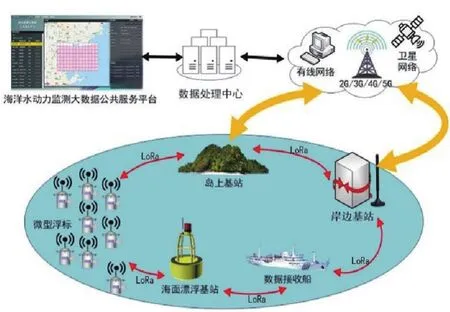
图4 基于Lora的可抛弃式微型浮标的网络架构图
根据实验要求一次性布放40个浮标,设定采集周期为2 min,进行一次通信接力最短为0.5 s,2 min内可以完成通信接力次数为:

一次通信接力最远传输距离20 km,那么任一浮标通过通信接力最远传输距离为:

一个LoRa基站能接入上万个终端,将带有LoRa终端模块和北斗定位模块的微型可抛弃式浮标大量布放于海流中,实现海流数据精细化采集,可抛弃式微型浮标周期性地将位置、流速和浪高等数据传递给LoRa基站,LoRa基站通过3G/4G或卫星通信的方式将数据传送到海洋水动力监测大数据公共服务平台。
可抛弃式微型浮标内部装配电路板,电路板设计具有LoRa低功耗窄带通信、北斗位置定位和授时功能,该电路由CPU模块、北斗/GPS定位模块、窄带通信模块、TTL接口和电源模块组成[17]。电路板实物图如图5所示。

图5 电路板实物图
浮标采用STC15W4K系列单片机为核心处理器,实现数据的接收处理、协议解析、数据缓存和数据通讯。定位模块和芯星通UM220-IV NL芯片为核心,负责接收北斗/GPS的信号,实现位置定位和北斗授时。窄带通讯模块选用Ra-01为数据收发模块,发送和接收频率为410~525 MHz,实现多通道独立数据收发。电源模块采用3.7 V稳压供电,具有电源保护作用;串口模块采用4针TTL模式,进行核心处理器的程序下载与更新。
可抛弃式浮标的工做流程如图6所示。程序启动后,将对Lora通信和北斗通信进行变量初始化、配置主程序参数等操作。接下来进入到北斗数据采集和监听程序,并判断是否处于采集时间点,若不是采集时间点,则继续监听北斗信号,若是采集时间点,则进行北斗有效数据的采集和存储。采集程序结束后,判断基站是否能接收程序,若没有基站接收数据则继续监听北斗数据,若有基站接收数据则读取历史数据并将数据传输。

图6 可抛弃式微型浮标工作流程图
3 浮标体流体力学仿真分析
文中通过ANSYS Workbench中的Fluent和Static Structural模块对浮标进行流固耦合分析。对比分析带舵叶和减摇鳍的微型浮标与未进行结构优化的圆柱形浮标、带不同展弦比舵叶的微型浮标的水动力学特性。证明带舵叶和减摇鳍的微型浮标体的优越性,同时确定微型浮标所带舵叶的最佳尺寸。
3.1 控制方程
3.1.1 流固耦合方程
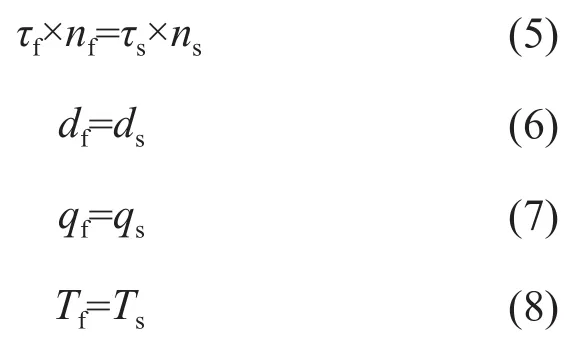
流固耦合遵循最基本的守恒原则,所以在流固耦合交界面处,应满足流体与固体应力τ、位移d、热流量q、温度T等变量的相等或守恒,即满足如下4个方程:
3.1.2 湍流方程:
湍流方程如式(9)~式(10)所示:

式中:κ为湍动能;ε为耗散涡;为湍动能的变化率;为对流输运的湍动能在X方向上的变化率;为耗散涡的变化率;为对流输运的耗散涡在X方向上的变化率;Gκ为平均速度梯度产生的湍动能κ的产生项;Gb为浮力引起的湍动能κ的产生项;YM为可压湍流中脉动扩张的贡献;C1ε,C2ε,C3ε为经验常数;Sκ,Sε为用户定义的源项。
3.2 网格化处理与前处理设置
采用大型通用有限元分析软件ANSYS Workbench进行整体结构模型建模,整个流体域的尺寸为长1 600 mm,宽500 mm,高500 mm。浮标在海水中漂浮时,主要受到海水的影响,所以仿真部分忽略空气对浮标的影响,只研究水流对浮标运动的影响。在对浮标进行瞬时的流固耦合分析过程中,假定微型浮标是固定不动的,水流是相对运动的。将模型导入到ANSYS中的 Design Modeler模块中,对流体域进行抽取,接着通过Meshing对模型进行网格化处理,总共生成1 071 088个网格,网格质量良好。
流体区域的入口边界为速度入口边界,速度大小设置为0.35 m/s。出口边界为无外部约束的自由边界且速度未知,所以出口边界设置为压力出口边界,压力大小为0 Pa。在Static Structural模块的Engineering Data中定义材料为光敏树脂,根据光敏树脂的材料属性设置材料密度为1.16 kg/m3、杨氏模量为2.5×106和泊松比为0.23。
3.3 流固耦合分析
3.3.1 带减摇鳍和舵叶的微型浮标与圆柱形浮标比较分析 图7和图8为零攻角情况下,带减摇鳍和舵叶展弦比λ=1.5的微型浮标与圆柱形浮标水下部分在0.35 m/s水流下的速度矢量图和压力分析图(展弦比λ=h/b。其中,h为舵叶的高度b为舵叶的弦长)。
比较图7-a和图7-b可以看出,在水流冲击浮标时,带舵叶的微型浮标在舵叶与浮标体的连接处几乎没有产生漩涡,舵两侧流速对称相等,不产生舵压,圆柱型浮标的背流面会产生漩涡,会诱导浮标发生偏转;圆柱形浮标背流面流线稀疏且分散,而带舵叶的微型浮标流线在舵叶尾部汇合,与来流平行,流线较密且集中,说明增加舵叶结构一定程度上减轻漩涡,并且保证浮标的稳定性。

图7 在0.35 m/s水流作用下浮标的速度矢量图
比较图8-a和图8-b可知,带减摇鳍和舵叶的微型浮标结构所受最大压力为8.217 6×10-5MPa,而圆柱型浮标所受最大压力为8.272 2×10-5MPa,说明带减摇鳍和舵叶的微型浮标结构受力更加均匀,稳定性更好。

图8 在0.35 m/s水流作用下浮标压力图
3.3.2 可抛弃式微型浮标舵叶压力分析 图9为带减摇鳍和舵叶的微型浮标在来流攻角为45°,流速为0.35 m/s时浮标迎流面和背流面压力分析图。在有攻角的情况下比较浮标舵叶两面所受压力,可以发现舵叶迎流面压力大于背流面压力,舵叶两面存在压力差,在舵压力作用下会使浮标产生回转力矩,一定程度上减轻浮标的旋转程度。

图9 可抛弃式微型浮标压力图
3.3.3 带有不同展弦比舵叶的微型浮标流体分析比较 为了确定微型浮标所带舵叶的最佳尺寸,对带有不同展弦比舵叶的微型浮标进行仿真。图10是在来流攻角为45°,流速为0.35 m/s,舵叶展弦比分别为0.5,1,1.5和2的微型浮标的速度矢量图。
翼端效应会使舵叶尾部产生尾涡系,并产生诱导阻力[18]。图10显示,舵叶展弦比越小的浮标,尾涡系越靠近舵叶的尾部,随着舵叶展弦比的增大,尾涡系会向后推迟,减小了尾涡对舵叶的影响,一定程度上减轻了翼端效应的影响,降低了阻力[19]。所以大展弦比的舵叶舵效更佳,对保持浮标稳定性更有利。
通过仿真研究得出结论:带减摇鳍和舵叶的微型浮标较圆柱形浮标受力更加均匀,稳定性更好。对带有不同展弦比舵叶的微型浮标研究表明,舵叶展弦比在0.5~2的范围内,随着舵叶展弦比的增加,舵效更佳,浮标稳定性更好。

图10 带有不同展弦比舵叶的微型浮标速度矢量图
4 水槽实验
4.1 实验过程
本实验在厦门理工大学实验水槽中进行。实验水槽长30 m、宽2 m、水深3 m,如图11所示。通过调节电机频率控制进水口流速,并在进水口处放置稳流管,减轻由于水头差及瞬间流量过大造成的水体紊乱,保证均匀来流。同时调节转子测速装置,使测速转子与浮标在同一水平,当流场测速装置所测断面流速稳定在0.35 m/s时开始实验。如图12所示为带舵微型浮标与无舵微型浮标实物图,浮标内部装有配重块、电池、电路板,天线竖直伸出,保证信号的稳定。实验过程中,将微型浮标进行编号并作上标记,同时在无舵浮标的上盖上标记方向性箭头,以便观测浮标的旋转程度。在距离进水口2 m处开始布放浮标体。实验通过记录浮标漂浮18 m距离过程中旋转的总圈数判断舵效。

图11 30 m水槽

图12 带舵浮标(左)与无舵浮标(右)实物图
4.2 实验数据及分析
本文开展了两组实验,第一组是测试并比较有舵浮标与无舵浮标的旋转程度,实验过程如图13所示,图左侧为无舵浮标,右侧为带舵浮标,浮标漂浮一段时间后,有舵浮标还未发生旋转,而无舵浮标已经旋转了1.25圈。第二组是对舵叶展弦比分别为0.5, 1, 1.5, 2的浮标旋转程度进行测试并比较。实验数据如表2所示。

图13 浮标实验图

表2 微型浮标所测流速与旋转程度记录表
4.3 实验数据分析和结论
从实验数据可以看出,无舵浮标旋转程度明显大于带舵浮标,且随着舵叶展弦比的增加,旋转程度减小。通过实验可得出结论:带舵微型浮标能在一定程度上减轻浮标漂流时的旋转程度,较无舵微型浮标稳定性更好,能更加精准地反应水流流速和流向。当舵叶展弦比在0.5~2的范围内时,舵叶展弦比越大,浮标稳定性越好。
5 结 论
为精细化采集海洋表面流水动力学参数,本文提出了一种新型的基于窄带物联网LoRa机制无线传输的可抛弃式微型浮标,可周期性地获取位置、流速和浪高等数据,能基本反应海流趋势,对海洋表层流的研究有实际应用价值。论文还提出了带舵叶和减摇鳍的结构,以提高浮标的稳定性,通过对该浮标进行Fluent流固耦合仿真和水槽实验,得出以下研究结论:
(1)比较带舵浮标和无舵浮标,得出增加舵叶结构能有效减轻微型浮标在水中漂流时的旋转程度,提高了浮标的稳定性,使浮标能更加精确地反映海流的水动力学参数;
(2)比较带有不同展弦比舵叶的浮标,得出当流速一定时,来流角度相同时,舵叶展弦比在0.5~2范围内的微型浮标,随着舵叶展弦比的增加,浮标的稳定性越好,随水流同步漂移的准确性越好。可抛弃式微型浮标的发展对海流观测具有非常积极的意义,也期待其早日大量投入并应用于海洋自然现象、海洋垃圾溯源、船舶溢油、失水人员救助等研究中。
