磁阻同步电动机的稳定性研究
2021-04-23詹兆康陈学珍
詹兆康,陈学珍
(1.河北工程大学 信息与电气工程学院,河北 邯郸 056000;2.湖北理工学院 电气与电子信息工程学院,湖北 黄石 435003)
普通异步电动机由于存在转差率,其转子损耗较大,发热严重,且结构较复杂。开关磁阻电动机虽然结构简单,转子无绕组,缓解了发热现象,但其材料利用率低。永磁同步电机具有高性能、高转矩密度的优点,但对温度要求严格。当温度较高时,永磁材料会退磁,且其制造成本高。因此,研究高品质变速传动电机具有非常重要的意义。轴向叠片(ALA)转子电动机正是电机发展所需的产物。目前,已有不少学者对ALA转子电机的开环变频起动性能问题[1-5]和结构优化[6-9]展开了研究,进一步改善了电机的起动性能。本文主要研究4极ALA转子电机参数对电机稳定性的影响,旨在为电机设计提供理论依据。
1 ALA转子电机数学模型
1.1 ALA转子电机时空矢量图
ALA转子电机定子采用三相无中线连接方式,建模时可以不考虑零序分量。ALA转子电机的简化时空矢量图如图1所示。其中,us为电压综合矢量;is为电流综合矢量;ω1为驱动电源基波频率;ωr为转子的旋转频率;id为直轴分量电流;iq为交轴分量电流;ud为直轴分量电压;uq为交轴分量电压;θ为综合电压矢量与q轴的夹角。

图1 ALA转子电机的简化时空矢量图
1.2 基本方程
电压表达式为:

(1)
式(1)中,Rs为定子电阻;Ld为直轴电感;Lq为交轴电感;p为微分算子。
电压约束条件为:
(2)

(3)
式(3)中,θ0为稳态值,以下下标“0”均表示稳态值。
电磁转矩表达式为:
(4)
式(4)中,P为极对数。
运动表达式为:
(5)
式(5)中,J为转动惯量;TL为负载转矩;B为摩擦粘滞阻尼系数。
稳态运行时表达式为:
(6)
式(6)中,
(7)
式(7)中,
(8)
2 稳定性能分析
2.1 小信号建模
联立式(1)~(5),建立小扰动线性化状态方程:
(9)
设x1=Δid,x2=Δiq,x3=Δθ,x4=Δω,则式(9)可以表示为:
x=A(x)x+B(x)u
(10)
式(10)中,x为状态小扰动矩阵;A(x)为状态变换矩阵;B(x)为输入矩阵;u为输入干扰矩阵。
2.2 稳定性分析
电机的主要结构参数包括定子电阻Rs、直轴电感Ld、交轴电感Lq、转动惯量J、摩擦粘滞阻尼系数B,仅改变其中一个参数,其他参数保持不变。在5~50 Hz频率范围内对式(10)求解不同频率下的主导特征值。根据线性系统稳定理论可知,只要线性系统的特征值都具有负实部,则系统在该频率下是稳定的。
1)当Ld=0.2 H,Lq=0.057 H,P=2,J=0.0267 kg·m2,B=50.44×10-3N·m·s·rad-1时,不同Rs在不同频率下的主导特征值轨迹如图2所示。

图2 不同Rs在不同频率下的主导特征值轨迹
2)当Rs=2.5 Ω,Lq=0.057 H,P=2,J=0.0267 kg·m2,B=50.44×10-3N·m·s·rad-1时,不同Ld在不同频率下的主导特征值轨迹如图3所示。

图3 不同Ld在不同频率下的主导特征值轨迹
3)当Rs=2.5 Ω,Ld=0.2 H,P=2,J=0.0267 kg·m2,B=50.44×10-3N·m·s·rad-1时,不同Lq在不同频率下的主导特征值轨迹如图4所示。
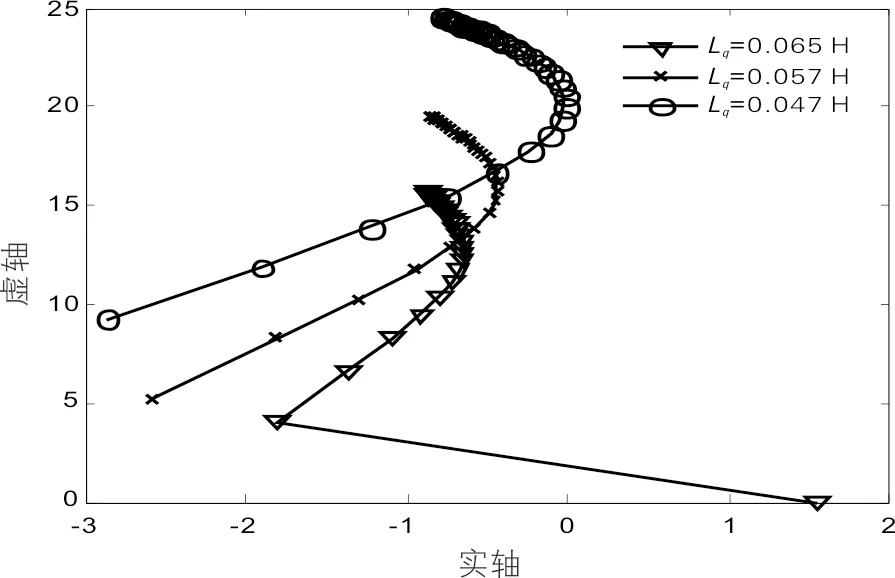
图4 不同Lq在不同频率下的主导特征值轨迹
4)当Rs=2.5 Ω,Ld=0.2 H,P=2,Lq=0.057 H,B=50.44×10-3N·m·s·rad-1时,不同J在不同频率下的主导特征值轨迹如图5所示。

图5 不同J在不同频率下的主导特征值轨迹
5)当Rs=2.5 Ω,Ld=0.2 H,P=2,Lq=0.057 H,J=0.0267 kg·m2时,不同B在不同频率下的主导特征值轨迹如图6所示。
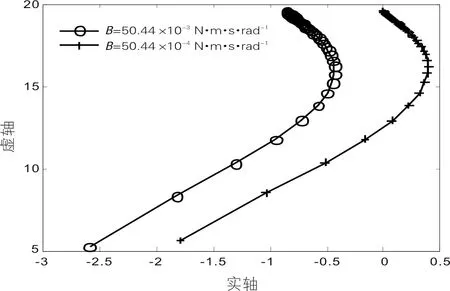
图6 不同B在不同频率下的主导特征值轨迹
由图2可知,Rs越大,特征值轨迹越靠近虚轴,即相对稳定性越差。由图3和图4可知,若选择合适的Ld与Lq时,电机的稳定性较好。由图5可知,J越小,特征值轨迹越远离虚轴,即电机的相对稳定性越好。由图6可知,B越小,电机的相对稳定性越差。这些分析结果可以作为设计ALA转子电机的理论依据。除此之外,还要考虑电机的动态性能,兼顾两者综合设计。
3 实验
实验样机参数取额定功率为2.2 kW,额定电压为380 V,额定转速为1 500 r/min,定子电阻为2.5 Ω,转动惯量为0.007 kg·m2。由于ALA转子电机空载稳定性最差,所以只对ALA转子电机进行空载实验。由通用恒压频比变频器提供电源,可手动操作加/减速、起/停,且事先设置好电源频率上升的斜率和预定值。手动操作记录每个频率对应的速度及电流,包括电源频率f、同步转速n0、电机实际速度nALA和相电流I。ALA转子电机空载起动数据见表1。由表1可知,电机在各频率下起动较平稳。
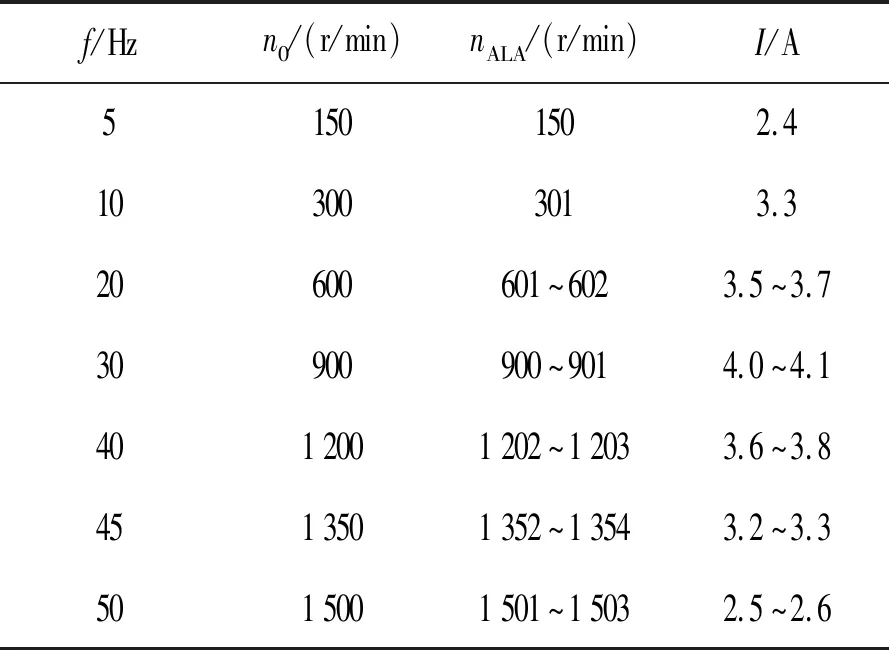
表1 ALA转子电机空载起动数据
在完成手动实验后,再进行ALA转子电机自动升频空载起动实验,设置起动时间为2 s。ALA转子电机速度曲线如图7所示,其中,横轴表示时间,每格对应0.625 s,纵轴表示电机速度,每格对应576.9 r/min。由图7可看出,ALA转子电机能同步快速起动到50 Hz稳定运行。
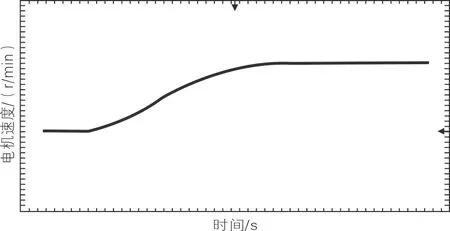
图7 ALA转子电机速度曲线
4 结论
建立了4极ALA转子电机的小信号数学模型,计算了电机的主要参数并分析了各参数在不同频率下的主导特征值轨迹,获得了各参数对电机稳定性的影响规律,为电机设计提供理论依据。对样机分别进行了恒压频比变频起动手动升频和自动升频实验,结果表明,电机在各频率下起动平稳,并能同步快速起动到50 Hz稳定运行,具有较好的稳定性与快速响应性能。
