金属橡胶减振器在同轴两反空间相机中的应用
2021-04-22宋文轩李宗轩谢晓光张德福
宋文轩 ,李宗轩 ,谢晓光 ,吴 昊 ,张德福
(1. 中国科学院长春光学精密机械与物理研究所,吉林长春130033;2. 中国科学院大学,北京 100049;3. 中国科学院国防科技创新天基动态快速光学成像技术重点实验室,吉林长春130033)
1 引 言
在对地观测、深空探索等科学研究中,空间相机发挥着越来越重要的作用。但是在火箭发射升空阶段,连接空间相机的卫星平台受到火箭的脉动推力、喷气噪声以及紊流边界层噪声等综合作用会产生随机振动激励[1],激励经过卫星平台上的柔性支撑结构传递到空间相机结构上会造成结构变形与微应力,使空间相机的光学元件产生失调与面形误差,从而导致光学系统的成像质量下降。此外,振动也会造成空间相机内部元器件的失效。为了提高空间相机的可靠性,本文设计了金属橡胶减振器。
目前,国内外大多数对金属橡胶的研究集中在其力学模型的建立上。其中,邹广平等提出对弹簧-金属丝网橡胶组合减振器迟滞力学模型[2]。吴荣平等以试验为基础,分析了金属橡胶的密度、金属丝直径、螺旋卷直径及温度对金属橡胶径向刚度特性的影响,并建立了金属橡胶径向力学模型[3]。罗玛等采用准静态压缩试验和有限元仿真研究金属橡胶材料的横向各向同性和应变相关性的非线性特征[4]。金鸣等采用正弦扫频和冲击实验考察了配重、激励幅值以及冲击持续时间等因素对金属橡胶减振器振动冲击响应的影响[5]。近年来,金属橡胶减振器在风力发电机组、航空、航天等领域得到了广泛的应用,用以解决航天航空等仪器设备在高温、高真空、超低温及剧烈振动等环境下的减振防护问题[6-11]。
本文根据空间相机在发射过程中的动力学环境和相机在轨成像质量要求,提出在保证整体结构的一阶固有频率大于100 Hz 的前提下,使中高频率的随机振动被减振系统衰减的设计指标。根据这个指标计算金属橡胶减振器的结构参数和材料参数等,以此来设计金属橡胶减振器。所设计的金属橡胶减振器的减振效果明显,满足设计要求。
2 金属橡胶减振器的力学模型
2.1 金属橡胶的本构关系
金属橡胶是干摩擦迟滞阻尼材料,由金属丝制备成螺旋卷,将螺旋卷金属丝定螺距拉伸后按一定形状进行编织铺放制成毛坯后冲压成型[12]。金属橡胶内部有很多孔洞,既呈现类似橡胶材料的弹性和阻尼性能,又保持金属的优异特性,还具有明显的非线性动力学特性。由于在振动过程中受到激励,金属橡胶的金属丝之间相互挤压和滑移摩擦而产生阻尼力,具有黏弹性行为,加载过程中阻尼力阻止金属丝的滑移,卸载过程中阻尼力阻止变形恢复。金属橡胶在加载和卸载过程中的力-位移曲线并不相同,形成了迟滞回线。图1 为金属橡胶的迟滞曲线,曲线所围成的迟滞环的面积即为振动过程中消耗的能量,金属橡胶通过能量耗散来减振。
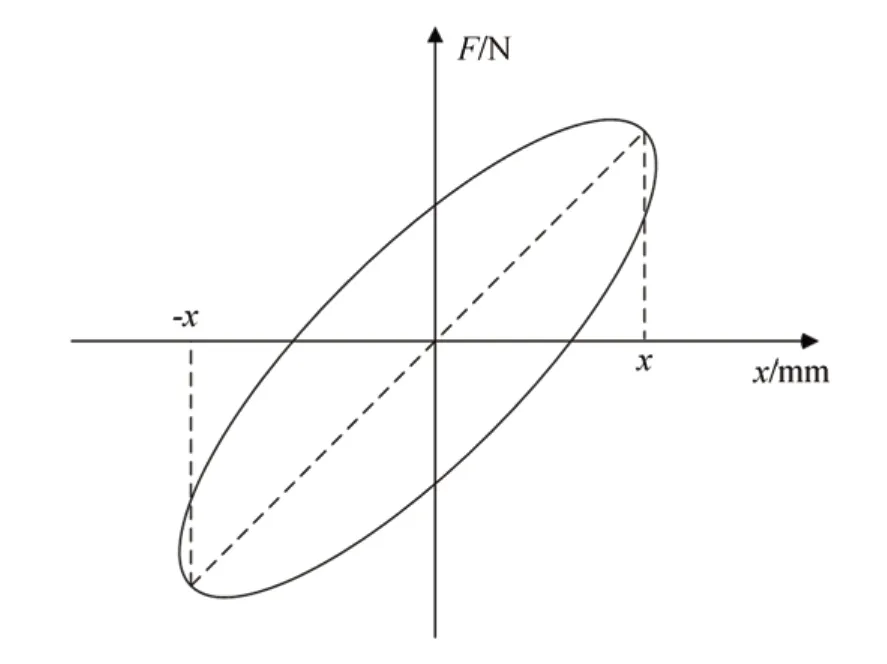
图1 金属橡胶的迟滞曲线Fig.1 Hysteresis curve of metal rubber
金属橡胶的性能采用双折线模型,其本构关系式为[13]:
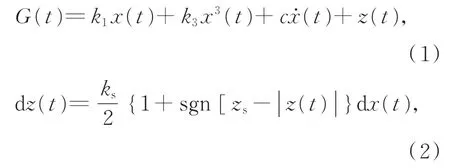
式中:x(t)和x˙(t)分别为金属橡胶块受激励后产生的变形量和变形速度;k1是线性刚度系数;k3为非线性刚度系数;c为黏弹阻尼系数;G(t)为恢复力,与金属橡胶块受激励点的位移和速度有关,因此是无记忆恢复力;z(t)是金属橡胶变形过程中干摩擦引起的有记忆恢复力,与整个变形历史有关,因此金属橡胶减振器具有滞后非线性性能;zs表示最大滑移恢复力;ks表示滑移刚度。
2.2 金属橡胶减振系统的动力学模型
典型的金属橡胶阻尼元件的等效减振动力学模型如图2 所示,它由基体、金属橡胶和被减振物体组成[14]。金属橡胶与基体和被减振物体M相连,其中,被减振物体M 质量为m,金属橡胶减振器的质量很小,忽略不计。基体受外部环境激励产生位移z(t),外部激励通过基体和金属橡胶使物体 M 产生位移x(t)。
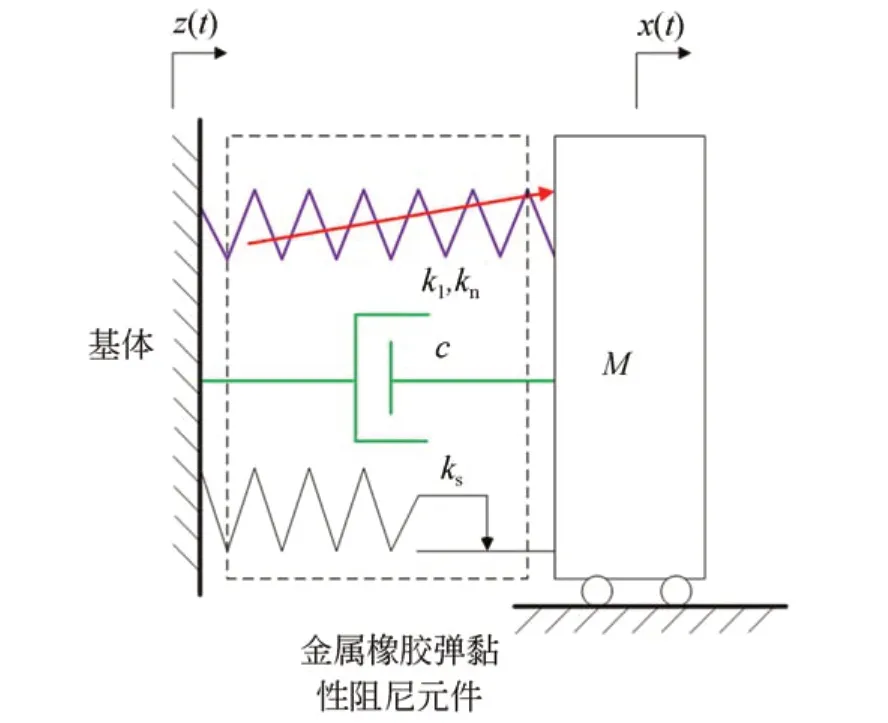
图2 金属橡胶的等效动力学模型Fig.2 Equivalent dynamical model of metal rubber
金属橡胶具有迟滞阻尼特性,其动态模型可用高阶非线性刚度与等效黏性阻尼力叠加的方法构造[15],结合金属橡胶的非线性本构关系,金属橡胶阻尼元件的非线性动力学微分方程为:

式中:kl为线性刚度系数,kn为非线性刚度,c为阻尼系数,F(t)为有记忆恢复力。
由式(3)可以看出,金属橡胶阻尼和刚度的复杂性及非线性。在工程上金属橡胶的动力学很难得到进一步分析,因此,简化金属橡胶减振系统的非线性动力学模型,简化后的动力学模型如图3 所示。
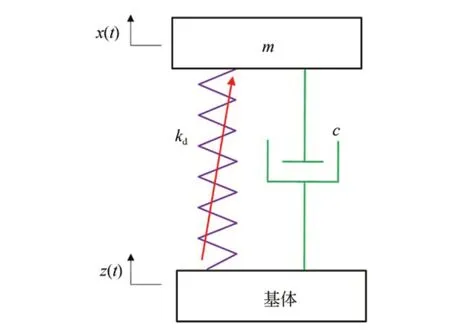
图3 金属橡胶减振系统的动力学模型Fig.3 Dynamical model of metal rubber isolation system
由图3 可以得到简化后的金属橡胶减振系统的动力学微分方程为:

令x-z=y,得:

对式(5)进行拉普拉斯变换,得到:

由X(s)=Z(s)+Y(s)得:

令ωn为减振系统的无阻尼自然频率,ξ为减振系统阻尼比,得到:


其中G(s)为响应幅值与激励幅值的传递函数。

减振系统的动态刚度可由以下公式计算:

式中:p为减振器所承担的重力,g为重力加速度,f0为系统的最高固有频率[16]。
3 金属橡胶减振器结构设计
3.1 金属橡胶的特点
空间相机在发射过程中,振动力学环境所含频率范围宽广,尤其在低频段模态分布密集,容易激起共振。根据火箭发射阶段振动环境的特点,金属橡胶减振器应具有较高阻尼,以抑制共振,在中高频段,金属橡胶减振器应该有效降低加速度响应均方值,以达到良好的衰减振动作用[17]。
空间相机在轨运行时处于周期性高低温和太空辐射环境,因此对减振器材料要求很高,普通橡胶材料并不适合。金属橡胶具有耐高低温、耐腐蚀、不易老化、抗冲击和工作寿命长的特点,而且能够在较宽的频带内减振,适用于空间相机减振器。此外,单个金属橡胶减振器具有非对称弹性,且由于黏性阻尼力及双折线恢复力的影响,更容易引起减振器力学性能的不稳定,这样导致金属橡胶减振器很难达到理想的动力学性能,因此空间相机减振器采用两个金属橡胶串联成一组的方式,每组金属橡胶减振器上下两个金属橡胶减振元件性能一致。为了获得稳定的减振性能,上下减振元件的拉压必须要保持一致。
3.2 金属橡胶减振器的参数计算
根据振动理论,选择的阻尼比ξ使振动传递率T控制在3~4,金属橡胶的阻尼比可设计为ξ=0.2[18]。
像元级的振动量会对图像产生较大影响。从空间相机的成像要求和动力学环境出发,设计的减振器要保证能对20 Hz 以上的振动被动减振,为避免与卫星发生共振,还要保证空间相机的一阶固有频率大于100 Hz。同轴两反空间相机质量为25 kg,取g=9.8 m/s2,整个空间相机共有12 组金属橡胶减振器。
由式(11)得固有频率范围为:

每组金属橡胶减振器的刚度为:

每组金属橡胶减振器采用上下两个金属橡胶减振元件串联的方式,因此单个金属橡胶元件的刚度应为:
稳定的奥氏体单相组织可明显提高金属橡胶的疲劳韧性,金属丝材料选为1Cr18Ni9Ti。根据金属橡胶的刚度约束条件和减振设计指标,设计金属丝丝径为0.2 mm,相对密度为0.2,将定螺距螺旋状态金属丝放入模具中,通过冲压方法得到黏弹性金属橡胶块,金属丝螺旋卷直径为15.2 mm,厚度为6.6 mm。制作的金属橡胶块如图4 所示。
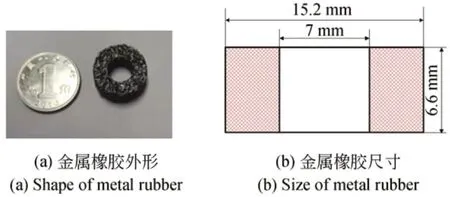
图4 金属橡胶Fig. 4 Metal rubber
3.3 同轴两反空间相机支撑结构和金属橡胶减振系统的设计
由于桁架结构具有质量轻、承载比高的特点,空间相机选用桁架结构,通过桁架将主镜承力室结构和次镜支撑结构固定连接在一起。近年来,复合轻质材料被广泛应用于航天工程领域[19],由于空间相机常用弹性模量相对较大的材料,因此桁架材料选用碳纤维复合材料。
空间相机末端采用Bipod 柔性支撑结构,Bipod 柔性支撑结构由一定角度的柔性铰链组成,材料为钛合金TC4。根据三点定位原理,将3 个Bipod柔性支撑结构三等分分布在空间相机主镜承力室的圆周内,呈中心对称。这种支撑方式约束空间相机6 个方向的自由度,卸载了空间相机内部热应力,能够减小应力对镜面面形的影响。
根据金属橡胶的特点设计空间相机的减振系统,如图5 所示,其作用主要是隔离空间相机沿z方向的振动。Bipod 柔性支撑结构上下两侧通过金属橡胶减振器与空间相机固定连接。
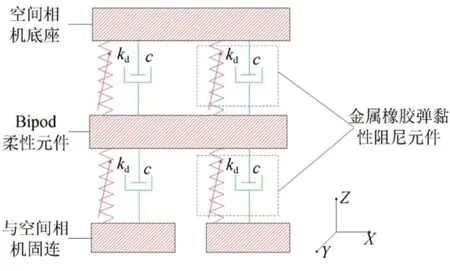
图5 减振系统示意图Fig.5 Schematic diagram of vibration absorber system
金属橡胶减振器由金属橡胶、套杯、套管、垫片和螺钉组成,金属橡胶的侧面和底面与套杯贴合,金属橡胶不接触套杯的一侧高出套杯2 mm,并且与平垫贴合。金属橡胶的内孔与套管过盈配合,金属橡胶在不受力的初始状态时填充于套杯内,与套杯过盈配合,当空间相机因外部环境发生振动时,振动引起空间相机沿各个方向的偏移进而使金属橡胶金属丝相互挤压和滑移摩擦消耗能量以抑制同轴两反空间相机的振动。根据金属橡胶减振系统,Bipod 柔性支撑结构上下侧对称安装8 个性能和尺寸均一致的金属橡胶减振器,上下侧为一组,而且固定位置一一对应,利用螺钉将金属橡胶减振器和Bipod 柔性支撑结构固定在空间相机上。金属橡胶减振器结构如图6所示。
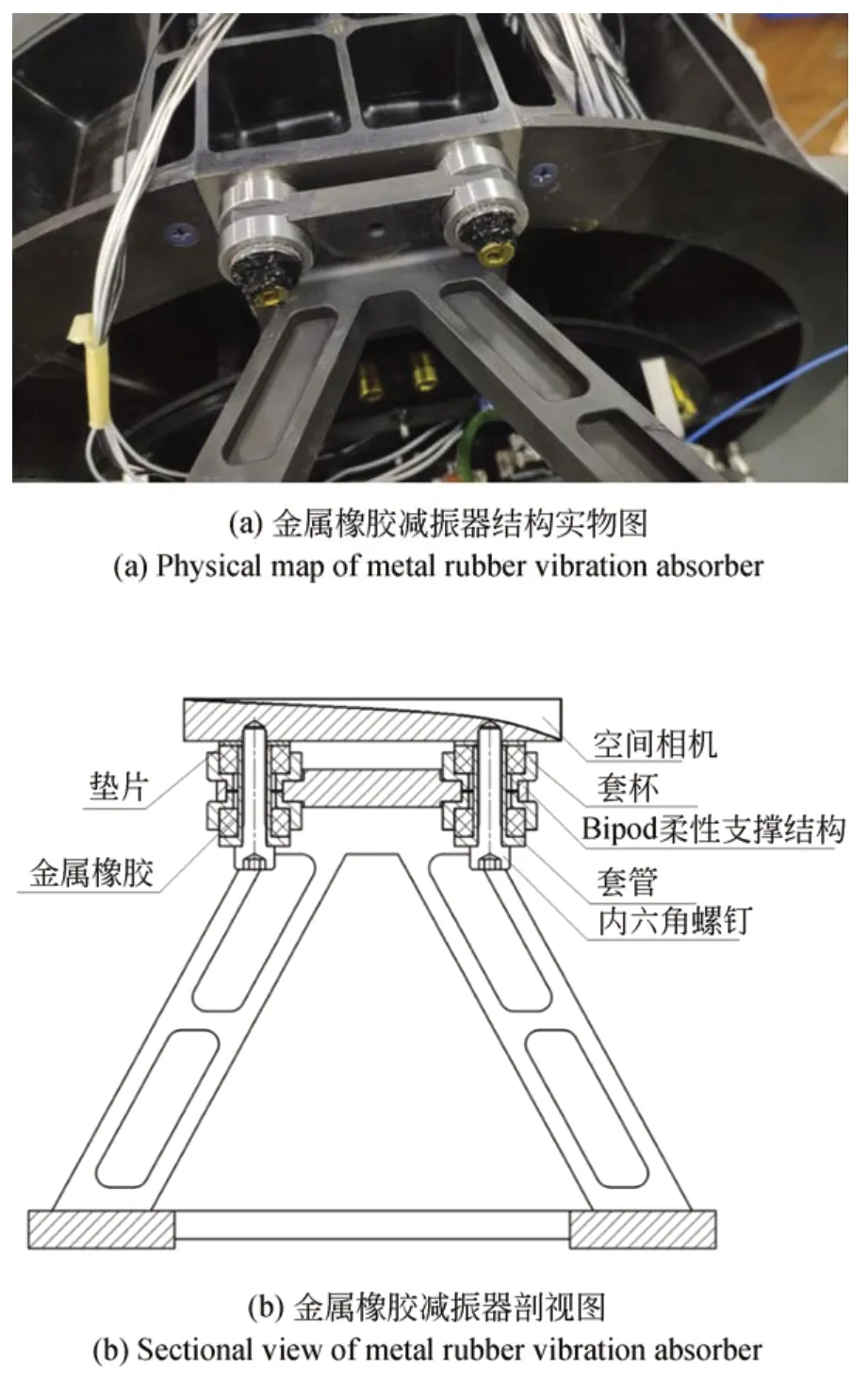
图6 金属橡胶减振器结构Fig.6 Structure of metal rubber vibration absorber
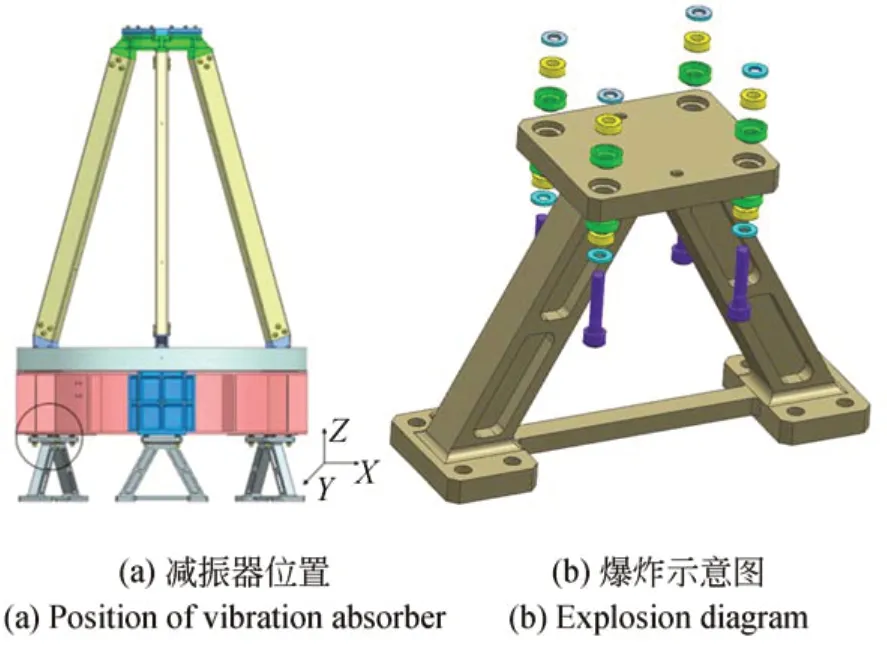
图7 金属橡胶减振器的安装位置和爆炸示意图Fig.7 Position and explosion diagram of metal rubber vibration absorber
图7 为金属橡胶减振器的安装位置和爆炸示意图。金属橡胶减振器安装在Bipod 柔性支撑结构上,布置于主镜承力室桁架埋件的正下方,增加了空间相机的刚度。爆炸示意图展示了金属橡胶减振器各组成部分的安装顺序。
4 有限元仿真
4.1 空间相机有限元模型的建立
为了分析金属橡胶减振器的减振性能,分别进行金属橡胶减振系统和无减振系统的空间相机有限元仿真分析。无减震的空间相机Bipod 柔性支撑结构与空间相机主镜承力室连接处采用聚酰亚胺隔热垫代替。
利用HyperMesh 软件对上述两种系统空间相机分别建立整体有限元模型,采用八节点六面体单元对各零件进行有限元网格划分,个别过渡连接的地方采用五面体楔形单元,在关键的力的传递路径上和局部开孔处以及关键连接位置网格划分较密以提高运算精度,非关键部位网格划分较稀疏。两种形式的空间相机的有限元模型如图8 所示,电箱用质量点代替,并用RBE2 与空间相机主镜承力室结构网格的节点连接,质量点坐标与电箱质心位置一致。桁架与桁架埋件之间的胶黏连接部分利用共节点方式连接。金属橡胶减振器采用BUSH 单元模拟,根据以往试验结果,整机结构的阻尼系数取0.02。空间相机有限元模型各零件的材料属性和真实空间相机相同,如表1 所示。
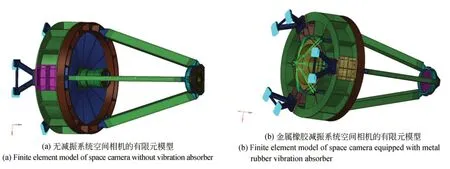
图8 空间相机的有限元模型Fig.8 Finite element model of space camera
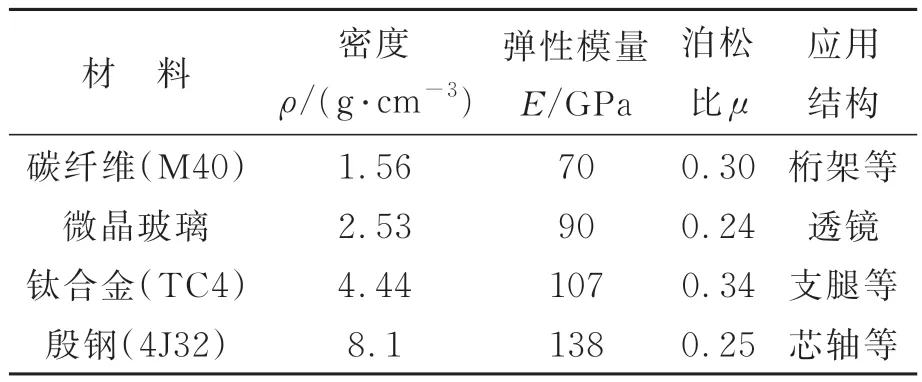
表1 材料的属性参数Tab.1 Parameters of materials
4.2 动力学分析
空间相机有限元仿真分析的边界条件为Bipod 柔性支撑结构与卫星连接处的节点施加6 个自由度的约束,如图8 所示。采用MSC/Nastran对有上述两种系统的空间相机进行模态分析,得到这两种系统光机结构的整机约束模态分析结果,如表2 所示。金属橡胶减振系统空间相机的前两阶模态振型如图9 所示。
由表2 可知,有金属橡胶减振系统空间相机的基频为125.61 Hz>100 Hz。金属橡胶减振器对空间相机基频的影响较小,满足空间相机结构设计要求。
对上述两种空间相机的有限元模型进行随机振动分析,在Bipod 柔性支撑结构与卫星连接处节点分别施加X,Y和Z三个方向的单位加速度载荷谱,三个方向如图7 所示(下同),频率为10~2 000 Hz,总均方根植为 4.98grms,加速度功率谱密度如表3 所示。
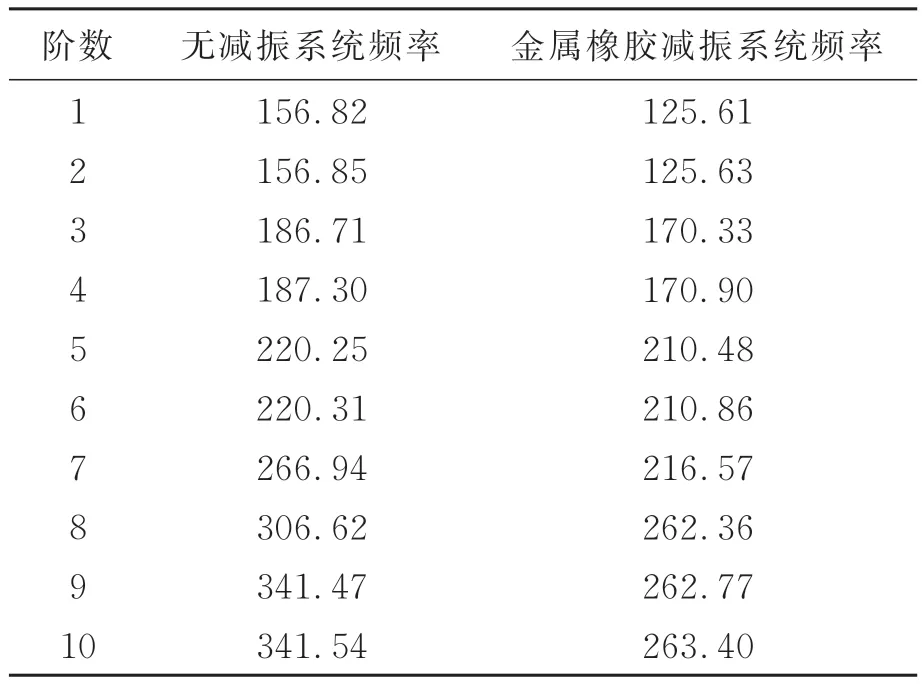
表2 两种空间相机的模态分析结果Tab.2 Modal analysis result of two space cameras(Hz)
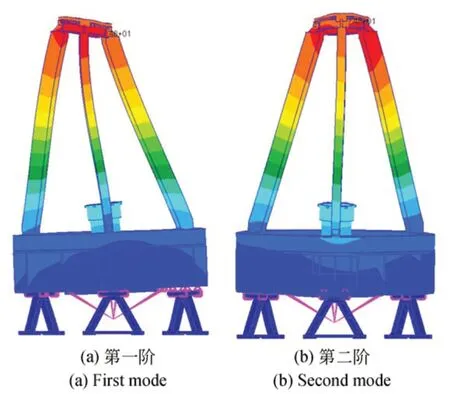
图9 空间相机前两阶模态振型Fig.9 First two vibration modes of space camera
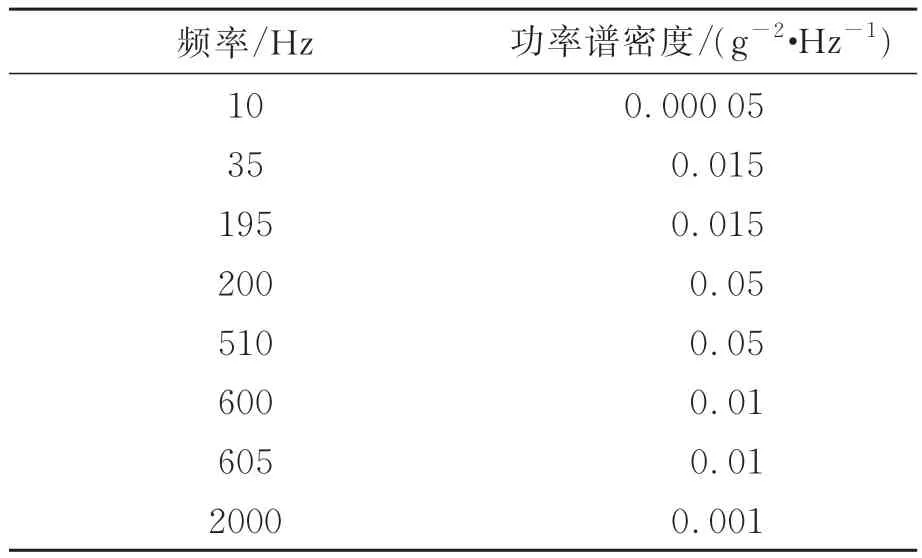
表3 加速度功率谱密度Tab.3 Acceleration power spectral density
图10 为MSC/Nastran 软件得到的分别在X,Y和Z三个方向的振动激励下金属橡胶减振系统空间相机次镜位置处的随机振动响应曲线,表4列出了金属橡胶减振系统空间相机和无减振系统空间相机分别在X,Y和Z三个方向的振动激励下次镜处节点的随机振动响应有限元仿真结果。
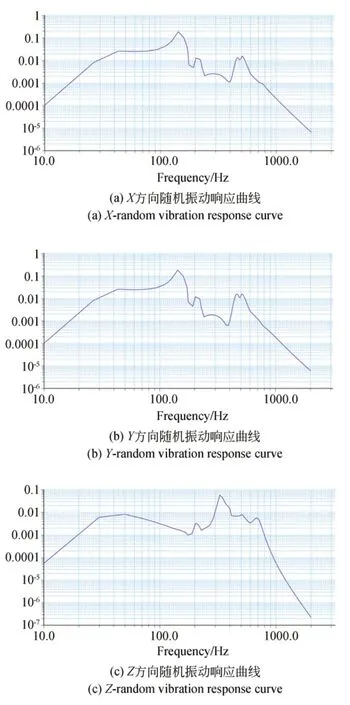
图10 随机振动响应结果Fig.10 Result of random vibration response
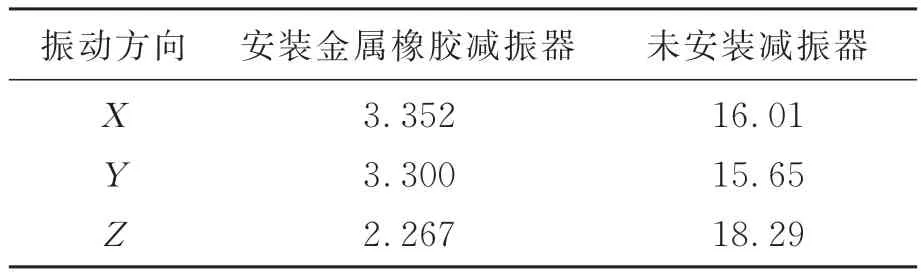
表4 随机振动响应分析结果Tab.4 Analysis results of random vibration response(grms)
从图10 和表4 可知振源传来的随机振动响应被金属橡胶减振器衰减。与输入激励的总均方根值相比,次镜处X,Y和Z三个振动激励方向的加速度均方根值分别降低33%,34%和54%,而未安装减振器的空间相机次镜处X,Y与Z三个振动激励方向的加速度响应分别放大3.2,3.14 和 3.67 倍 。
金属橡胶有非线性动力学特性,在振动过程中表现出滞后非线性,仅依靠有限元分析不能保证动力学分析结果准确,还需要进行试验验证。
5 试 验
5.1 振动试验方法
为提高光机结构稳定性,试验前对空间相机进行随机振动,以消除加工时光机结构和金属橡胶产生的内应力。利用振动试验台对两种系统空间相机进行正弦扫频试验和随机振动试验,一是采用无减振方式,用聚酰亚胺垫块代替金属橡胶,装配在空间相机与Bipod 柔性支撑结构之间;二是采用金属橡胶减振方式。
为了测试减振系统的性能,对金属橡胶减振系统空间相机进行振动试验时,将Bipod 柔性支撑结构固定在振动工装上。在空间相机底座Bipod 柔性支撑结构附近安装两个测试点,分别在空间相机底座上方和Bipod 柔性支撑结构底面,对比两个测试点的频率,并在空间相机远离减振系统的次镜柔性支撑支架位置处安装一个测试点以分析减振系统对次镜的影响,在空间相机工装处布置控制点,振动试验现场如图11 所示,振动测试点如图12 所示。

图11 振动试验现场Fig.11 Working site of vibration test
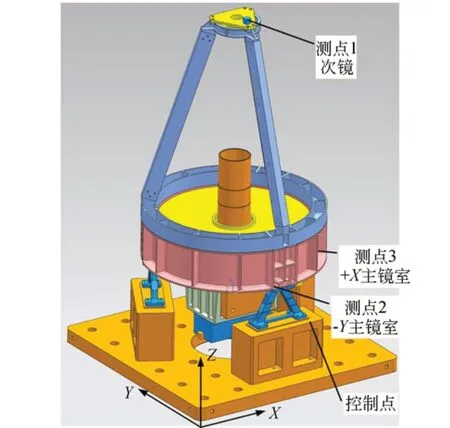
图12 振动测试点Fig.12 Vibration test points
5.2 同轴两反空间相机正弦扫频振动试验
试验扫频范围为10~2000 Hz,扫描率为4 oct/min,得到无减振系统空间相机和金属橡胶减振系统空间相机的X,Y与Z三个方向的振动响应,上述两种系统的空间相机X方向扫频曲线如图13 所示,对比两种系统空间相机X,Y与Z三个方向的一阶固有频率,如表5所示。
由表5 可知,金属橡胶减振空间相机的一阶频率均大于100 Hz,远离卫星固有频率,正弦扫频试验中空间相机没有发生共振,空间相机的结构可靠性高。
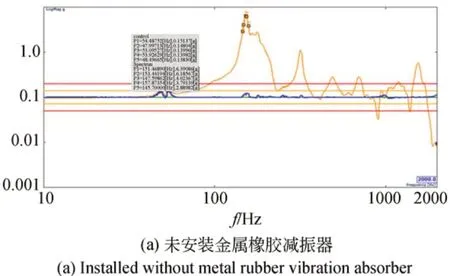
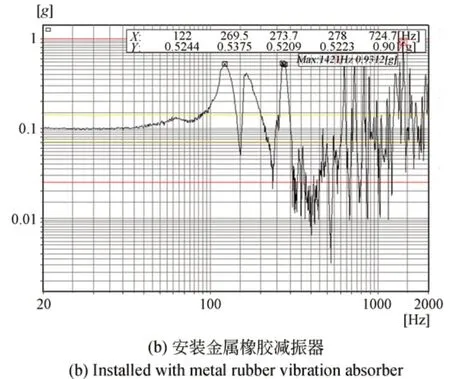
图13 正弦扫频振动试验结果Fig.13 Curves of sinusoidal sweep vibration response
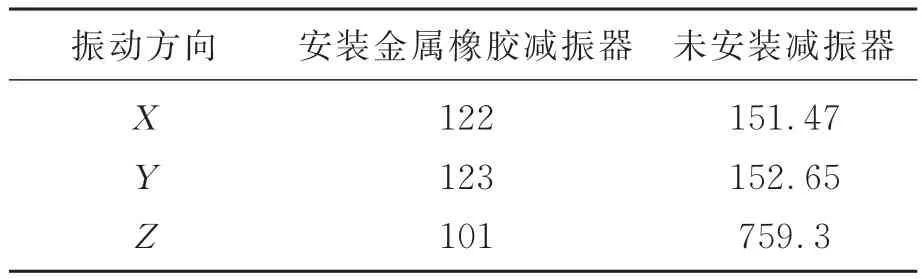
表5 试验数据对比Tab.5 Comparison of test data (Hz)
5.3 同轴两反空间相机随机振动试验
为进一步检验金属橡胶减振器的减振性能,对无减振系统空间相机和金属橡胶减振系统空间相机进行随机振动试验。随机振动试验采用模拟火箭发射时的功率谱密度,功率谱密度如表3 所示,随机试验频率为10~2 000 Hz,总均方根植为 4.98grms,在X,Y与Z三个方向分别施加振动激励,试验得到金属橡胶减振系统空间相机次镜位置三个方向的随机振动响应试验结果,如图14 所示。比较两种系统空间相机X,Y与Z三个方向次镜采样位置的随机振动响应试验结果,如表6 所示。
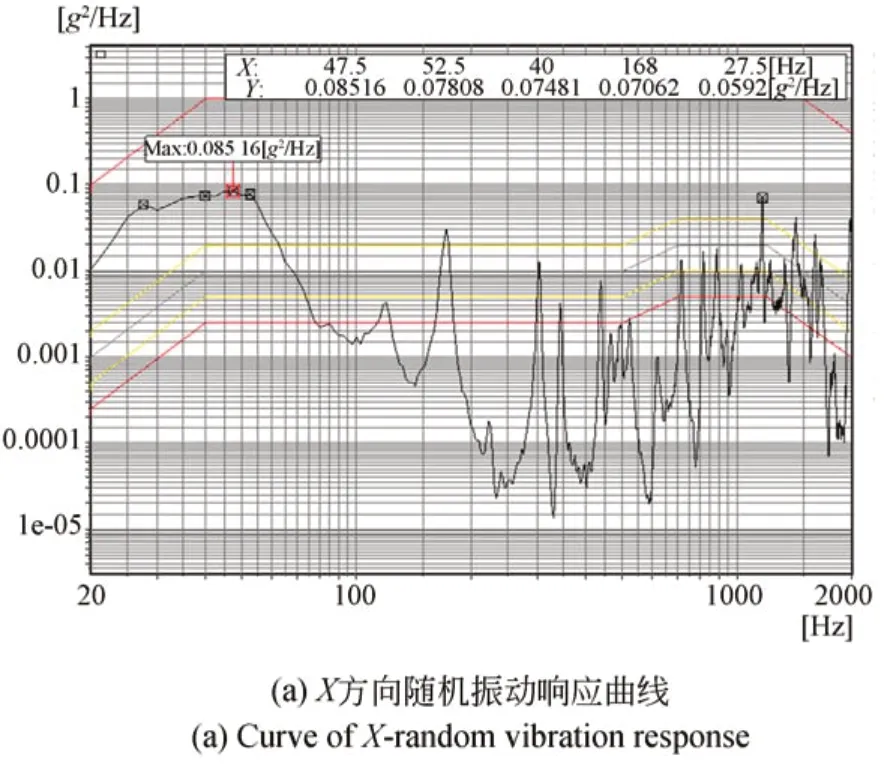
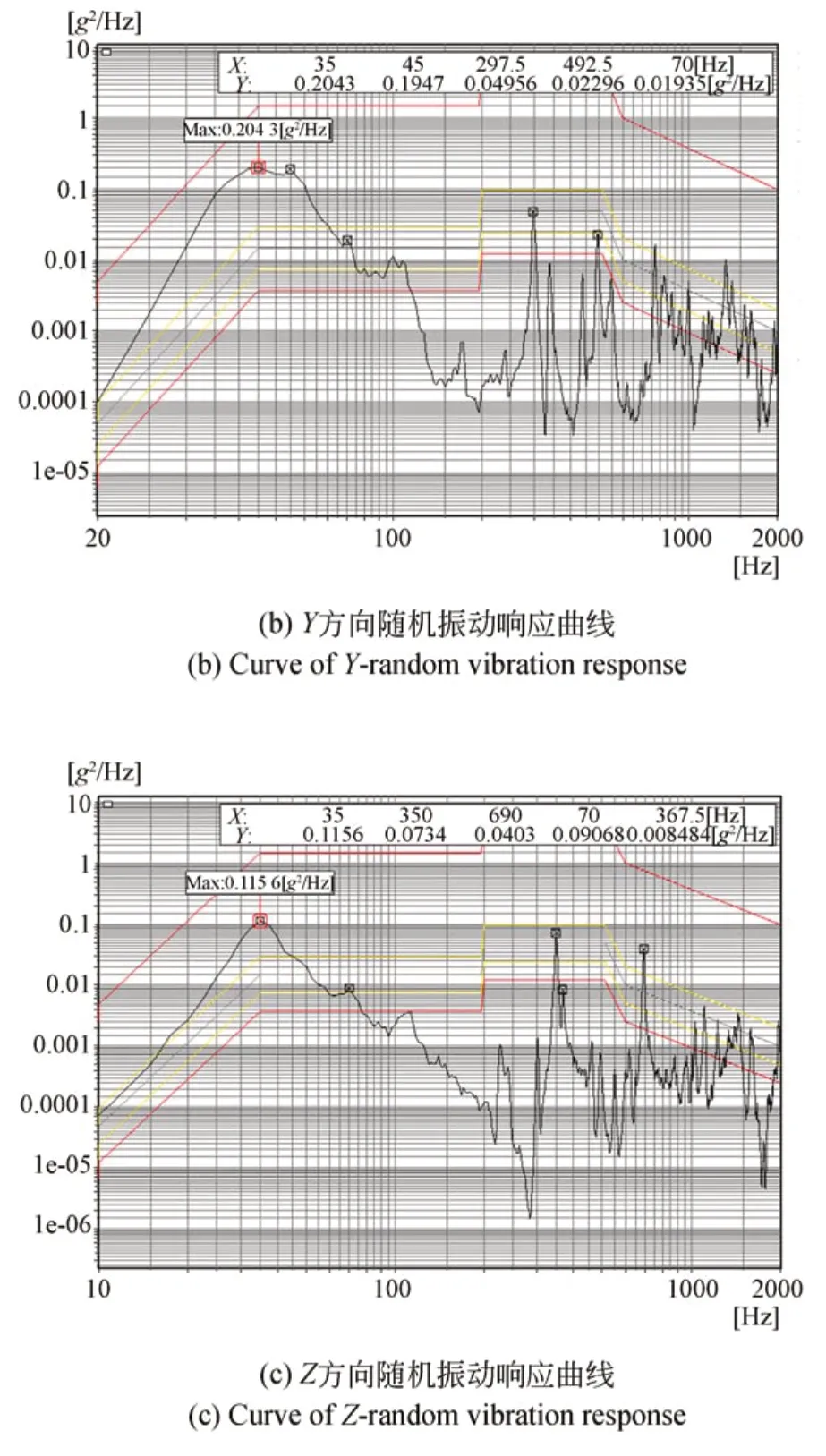
图14 随机振动试验结果Fig.14 Test results of random vibration
从表6 可得,与无减振空间相机的随机振动试验响应结果相比,金属橡胶减振系统空间相机X,Y与Z三个方向的加速度均方根值(Root Mean Square,RMS)的 下 降 率 分 别 为78%,79% 和 89%。
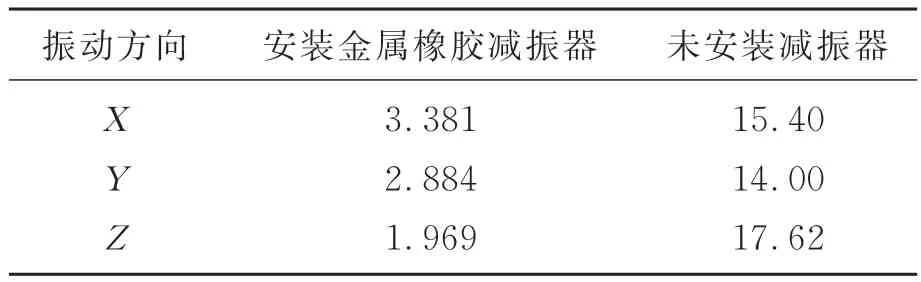
表6 随机振动响应试验结果Tab.6 Test results of random vibration response(grms)
5.4 试验前后光学检测结果对比
振动导致像点与焦面相对位置发生变化,该变化会造成系统调制传递函数(Modulation Transfer Function,MTF)下降,从而影响像质[20]。在振动试验前后进行光学系统波像差检测,检测结果如图15 所示。
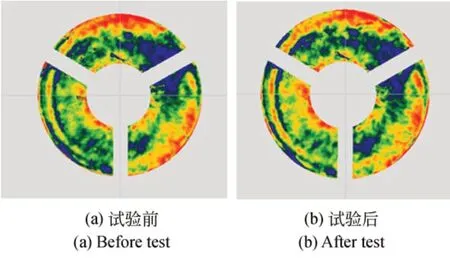
图15 波像差检测结果Fig.15 Test results of wave aberration
振动试验前后波像差RMS 值分别为0.101λ和0.091λ,光学系统的MTF 各个视场平均值为0.2,系统成像质量满足使用要求。
5.5 结果与分析
正弦扫频振动试验与随机振动试验的响应量级均与有限元仿真分析值相差不大。金属橡胶能大幅降低振源传递来的振动量,在振动后光学系统波像差满足使用要求。
6 结 论
本文通过分析成像质量对振动的要求和金属橡胶的动力学得到金属橡胶刚度的取值范围,从这个范围和减振指标出发设计出金属橡胶的参数,根据空间相机支撑结构的特点和金属橡胶的减振系统设计出金属橡胶减振器。对空间相机进行有限元仿真和振动试验验证,试验结果表明,金属橡胶减振系统空间相机X,Y与Z三个方向的一阶固有频率均大于100 Hz,满足结构设计要求;与输入激励总RMS 值4.98grms相比,金属橡胶减振系统空间相机X,Y与Z三个方向的随机振动响应加速度RMS分别降低32%,42% 和60%,减振效果显著。该金属橡胶减振器对同类型空间相机减振系统的设计具有重要应用价值。
