静轨紫外可见高光谱探测仪星上外定标方案
2021-04-22崔程光李云飞郭永祥李永强
崔程光,李 凌,李云飞,郭永祥,李永强
(北京空间机电研究所,北京 100094)
1 引 言
星上定标直接反映了遥感器入轨以后仪器性能的实际情况,同时为了保证遥感器在轨工作的长期有效性,以及遥感信息的高精度获取,遥感器需要配备星上定标系统,确定星上定标方案。星上定标方案是遥感器长期性能变化监测的重要手段,也是定量获取遥感器在轨性能信息,校正在轨遥感数据的基础[1]。
目前,国内外通常采用星上内定标系统和星上外定标系统。由于星上内定标系统只能完成部分光学系统监测,当未被标定的系统发生衰减或退化时会被认为是目标辐射量的变化。此外星上标准灯和太阳的光谱分布差异较大,需要将标准灯的定标结果进行光谱匹配处理,这会加大最终定标结果的合成不确定度[2-3]。对于长期在轨工作的遥感器,定标灯自身的衰减会引入其定标结果中,因此需要采用星上外定标系统。
太阳定标是目前比较成熟的星上定标方案[4],但是由于几何位置的约束,太阳定标不便于频繁进行,只能在轨道的某几个固定位置进行。月球定标同样面临这类问题,目前国际上通常采用交叉定标,但数据量有限[5]。美国通过Sea-WiFs 以 及 MODIS 中 的 Terra 和 Aqua 进 行 对 月交叉定标[6]。用“自动月球观测”(Robotic Lunar Observatory,ROLO)模型标定 Terra MODIS 和Aqua MODIS 的响应度一致性在1%~3%,Sea-WiFs 与两台MODIS 的响应度一致性为3%~8%[7]。美国早在1991 年进行了第一代太阳恒星辐照度比照实验(SOLSTICE I),以期以恒星监测太阳变化。他们采用31 颗恒星和太阳进行比对,其绝对精度达10%、相对精度达2%。美国又于2003 年发射了SOLSTICE II,其绝对精度为5%,相对精度为0.5%[8-9]。德国等也开展了太阳恒星比对研究工作[10]。星上外基准源逐渐丰富,但是由于遥感器多样化和卫星平台约束,单一空间外基准难以满足遥感器长期在轨定标需求,因此需要对星上外定标方案进行可行性分析,制定合理的星上外定标方案。
恒星理论表明,B 型和 A 型恒星(B,A 源于以温度分界的哈佛分类表示方法)在100~400 nm 波段内的稳定性优于1%。为了进一步提高在轨监测精度,本文提出一种采用恒星进行太阳辐射校正的方法。结合仪器特点和轨道几何约束研究了紫外可见高光谱探测仪在轨高精度辐射性能监测方案,同时结合月球定标实现星上外定标核心部件——漫反射板的在轨监测。然后,利用卫星工具包(STK)验证了在静止轨道下太阳定标、月球定标和恒星定标方案的可行性,最终确定采用太阳、月球、恒星相结合的方式实现仪器星上定标。该定标方案可为静轨紫外可见高光谱探测仪的在轨监测提供参考。
2 理论分析
紫外可见高光谱探测仪获取的目标光谱辐射可表示为:

式中:I(λ)为入射光谱通量,S(λ)为响应信号,Sstray(λ)为杂散光响应输出,Sdark(λ)为仪器暗信号。由于采用退偏器约束仪器的偏振响应,可忽略仪器的偏振影响[11]。
探测仪光谱响应度的在轨长期可靠性,或实时变化的在轨监测是获取高精度目标光谱辐射信息的关键,因此需要对其在轨监测进行研究[12]。内定标方案不仅难以对全光路进行系统监测,而且成本较高,因此需要研究静止轨道仪器的星上外定标方案,进而实现对探测仪关键辐射性能的监测。
2.1 仪器在轨运行t 时间后光谱辐亮度响应度
当进行太阳定标时,采用“太阳+俯仰漫反射板”的方式完成,此时仪器的光谱响应度为:

在同一星上外定标周期内完成恒星定标,假设探测仪在短时间内没有衰减等影响,此时可得恒星的目标光谱辐照度为:

式(3)与式(2)联立,可得太阳、恒星辐照度的关系,即:

通过分析可知,静止轨道遥感器的特殊几何位置不能实现每周一次的太阳定标,但对于部分恒星,遥感器每天均可见。因此,在遥感器对太阳和恒星均可见的时间内,太阳与恒星比对,并在太阳不可见周期内进行恒星定标。应用恒星对遥感器的光谱辐亮度每周进行一次定标。
由于恒星能量较弱,需要计算恒星定标的信噪比。恒星的具体位置、亮度和光谱特性及其表面温度可以通过查阅星表得到,将恒星近似为黑体,根据黑体辐射定律,由Plank 公式表达恒星的光谱辐射亮度分布[13],即:

式中:Bλ为恒星的光谱辐亮度分布,h为普朗克常数,c为光速,kB为玻尔兹曼常数,T为黑体温度。
静轨紫外可见高光谱探测仪单个像元接收到的光谱能量为:

式中:AD为探测器像元尺寸,τ(λ)为仪器的光谱透过率,D为探测仪入瞳大小,ES(λ)为探测仪入射窗口接收到的光谱辐照度。
探测器接收到的光子数为:

式中:η为探测器的量子效率,τ为积分时间。
探测仪的信噪比可以表示为[14]:

式中:Idark为暗信号,Dread为读出噪声。
2.2 仪器在轨运行t 时间后漫反射板BRDF
漫反射板衰减采用月球定标。假定漫反射板在卫星发射过程中其BRDF 不发生变化,即仪器在轨工作时第一次完成定标时漫反射板的BRDF 与实验室标定值相同。完成太阳定标时有[15]:

完成对月定标时有:


仪器在轨工作一段时间t以后,漫反射板的衰减因子为:
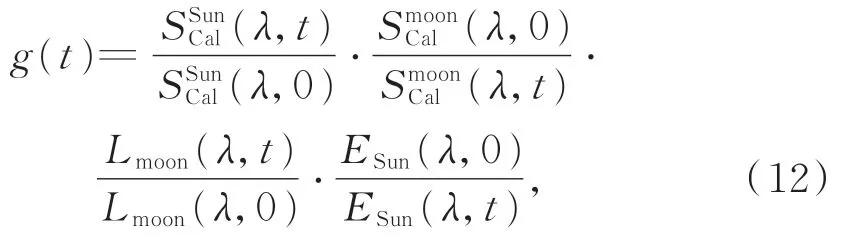
式中,Lmoon(λ,t)Lmoon(λ,0)可由美国 ROLO 的月球模型确定。此时只需计算月球光谱辐亮度的相对变化。
3 可行性分析
紫外可见高光谱探测仪视场为±12°×6.4°,可以实现全球东西覆盖和南北4 000 km覆盖,为实现对我国的完全覆盖,紫外高光谱探测仪的视场中心向北偏转5°,遥感器的轨道参数如表1 所示。
考虑静止轨道特点,需要分析太阳、恒星、月球各种定标方案的可行性,验证各定标方案,为紫外可见可见高光谱探测仪的在轨应用提供支撑。STK 分析流程如图1 所示。
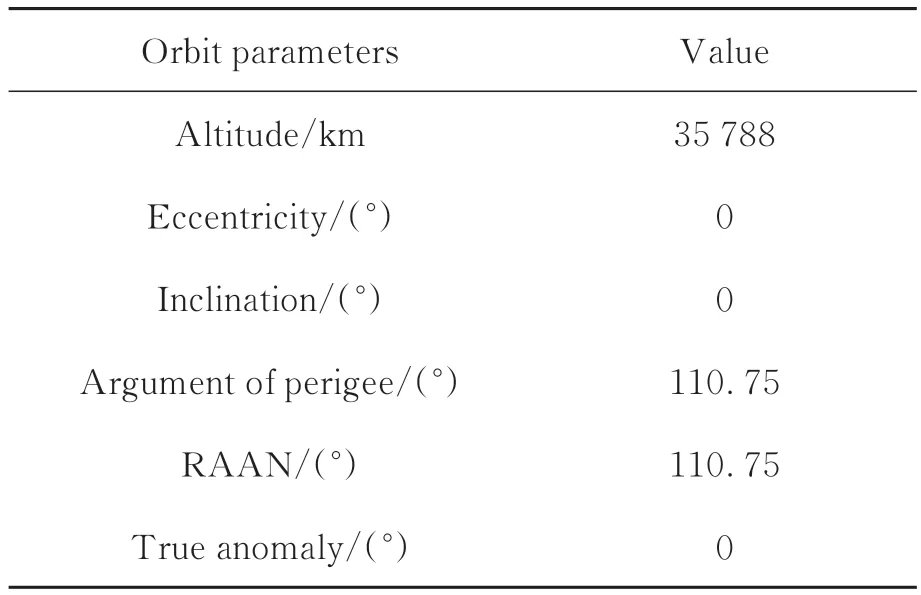
表1 紫外可见高光谱探测仪轨道参数Tab.1 Orbit parameters of GUVI high-spectral instrument
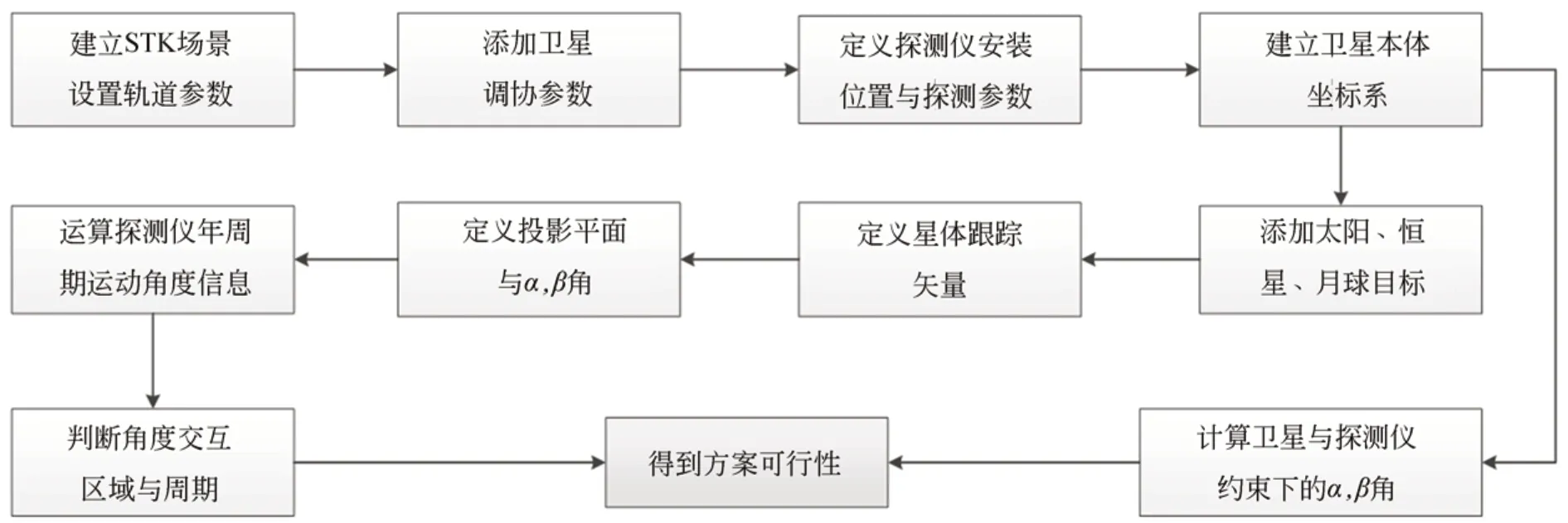
图1 卫星工具包(STK)分析流程Fig.1 Simulation analysis process of Satellite Tool Kit(STK)
3.1 太阳定标
在STK 中建立仿真场景,如图2 所示,以遥感器为坐标系主体,x为遥感器飞行方向,z为遥感器中心视场方向,y由右手坐标系确定。
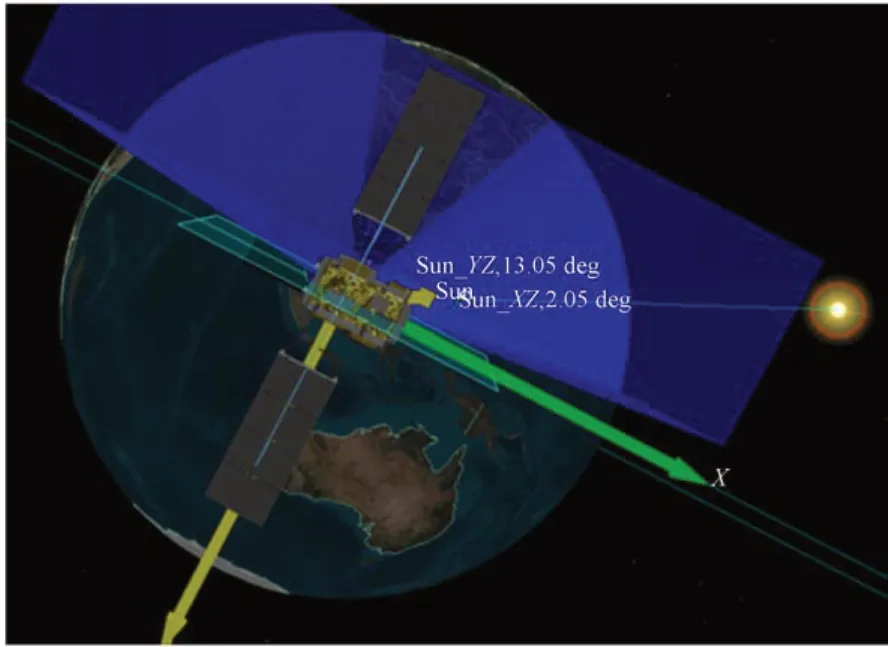
图2 静轨紫外可见高光谱探测仪太阳定标的STK 仿真场景Fig.2 Sun calibration simulation of GUVI in STK
仿真场景的数学模型简图如图3 所示,定义卫星本体竖直向下为Z轴,它与z轴的夹角为5°。定义α表示太阳和平面YZ的夹角,β表示太阳和平面XZ的夹角,θ为太阳和Z轴的夹角。当太阳处于探测仪视场中,同时太阳与地球位于同一象限内且不被地球所遮挡时可以进行太阳定标,即α∈[-12°,12°],β∈[-3.2°,3.2°],θ∈ (arcsin即θ∈[8.69°,90°)。 那 么 在太阳可见时间内存在可用角度,如图4 所示。
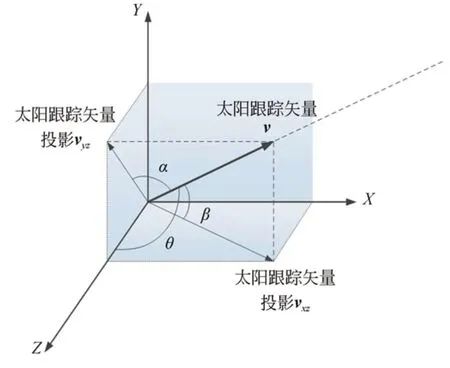
图3 太阳定标仿真数学简图Fig.3 Mathematical model in sun calibration simulation
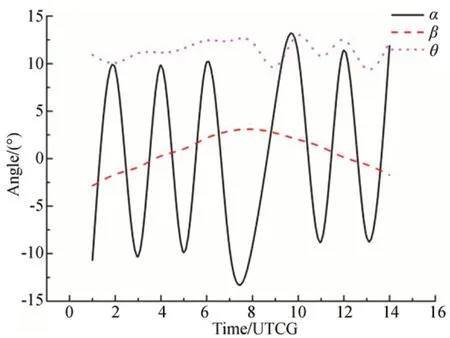
图4 太阳可见时刻内α,β,θ 角度变化Fig.4 Variations of α,β,θ for sun is visible
以 2016 至 2017 年为例,由图 5 可知在一年内太阳仅在三月下旬、四月上旬,以及九月上旬和中旬可见,不能满足长期太阳定标。
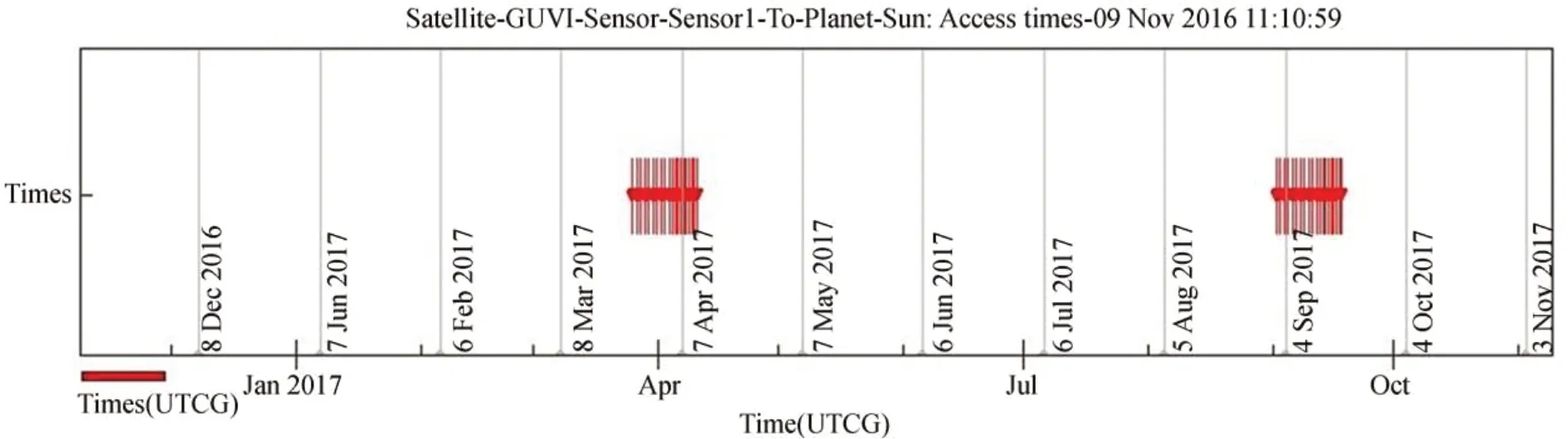
图5 太阳的年可见性分析Fig.5 Annual access analysis of sun in solar calibration
3.2 月球定标
同理,建立月球定标的STK 仿真场景如图6所示。定义α表示月球和平面YZ的夹角,β表示月球和平面XZ的夹角,θ为月球和Z轴的夹角。同样要求月球定标时,有α∈[-12°,12°],β∈[-3.2°,3.2°],即θ∈[8.69°,90°),可得在月球可见时间内相应角度的变化,如图7 所示。
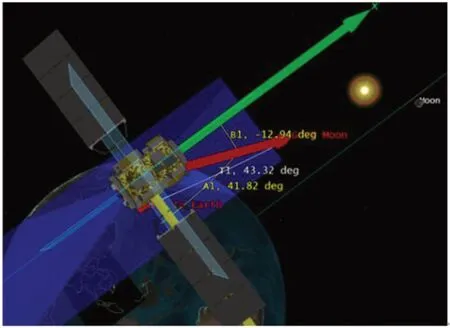
图6 静轨紫外可见高光谱探测仪的月球定标仿真场景Fig.6 Lunar calibration simulation of GUVI
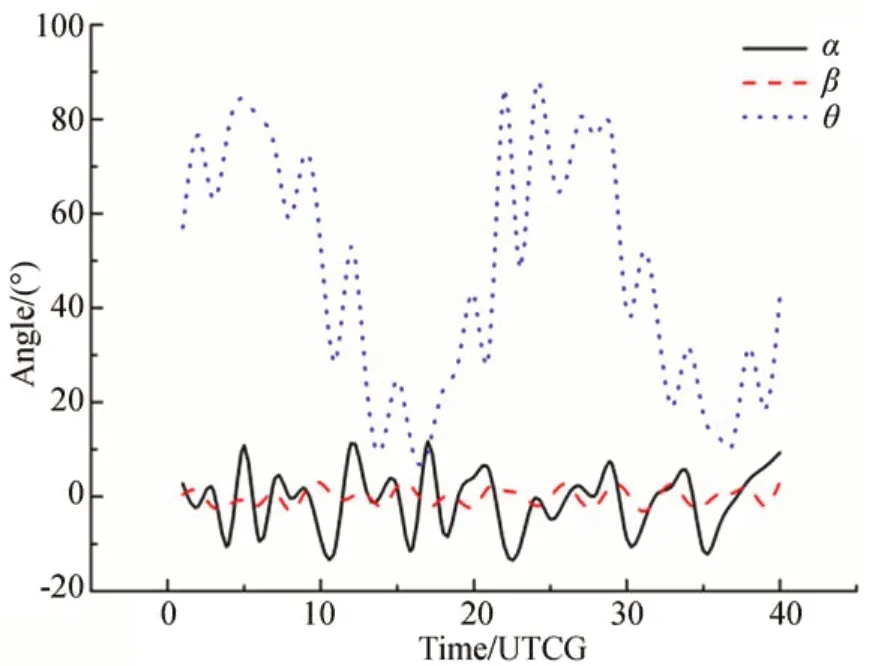
图7 月球可见时间内α,β,θ 角度变化Fig.7 Variations of α,β,θ for moon is visible
以2016~2017 年为例,由图8 可知在一年每月均有6~8 天对月球可见,因此可以利用月球完成在轨漫反射板监测。可每月进行2 次同月相下月球定标,进而获取对月定标数据[16]。
3.3 恒星定标
在STK 场景中建立星等在-10~1 之间的恒星模型,如图9 所示。同太阳、月球定标分析相同,得到可见恒星如表2 所示。分别分析各恒星的可见性,如图10~图12 所示。经分析可得,参宿五、参宿四、南河三每天均有两次对遥感器可见,可实现遥感器的长期星上定标。
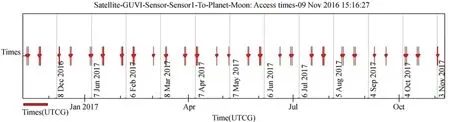
图8 月球的年可见性分析Fig.8 Annual access analysis of moon in lunar calibration
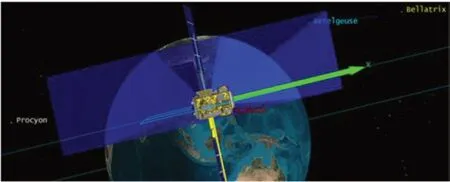
图9 恒星仿真场景Fig.9 Stellar calibration simulation in STK
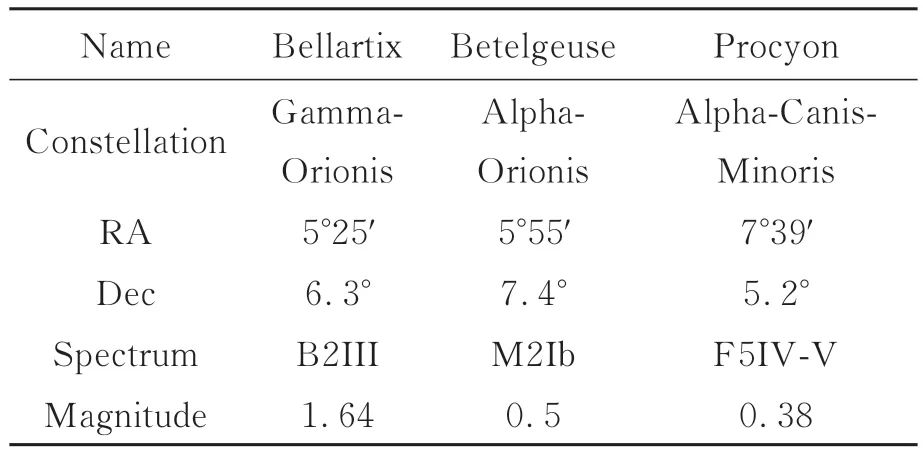
表2 可见恒星参数Tab.2 Parameters of visible stellars
为了研究各恒星的信噪比,本文采用黑体辐射定律估算它在仪器工作波段内,即250~500 nm 内的信噪比。查阅星表可得参宿五、参宿四、南河三的表面温度分别为22 000,3 500,6 650 K。静轨卫星遥感器的光谱分辨率为0.6 nm,占据3 个像元,单像元对应0.2 nm。此外,光学系统成像要求像面四个像元能量达80%,单像元达20%。光学系统中反射镜共4 块,单块镜反射率为0.9。光谱分光采用平面光栅,口径为35 mm,衍射效率为0.7。探测器的量子效率取0.55。依相应公式分析可得,三颗恒星的信噪比如图13 所示。由图可知,南河三在250~500 nm 波段内信噪比优于25,满足星上定标要求。
通过以上分析,结合探测仪及其轨道特点,可知太阳定标、恒星定标和月球定标的方案可行。因此在三月下旬、四月上旬,以及九月上旬和中旬,即在春分、秋分附近每周进行一次太阳定标。全年每月进行两次月球定标,每周进行一次恒星定标,定标序列如图14 所示。
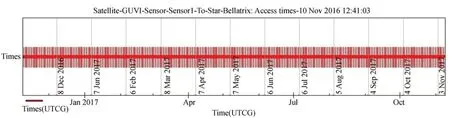
图10 恒星参宿四的年可见性分析Fig.10 Annual access analysis of Bellartix
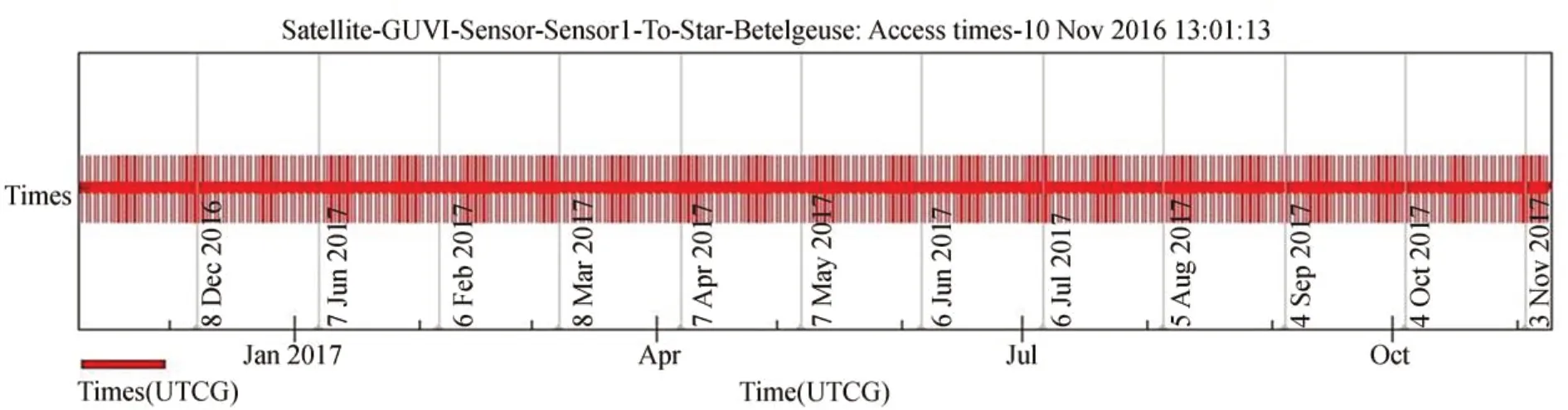
图11 参宿四的年可见性分析Fig.11 Annual access analysis of Betelgeuse
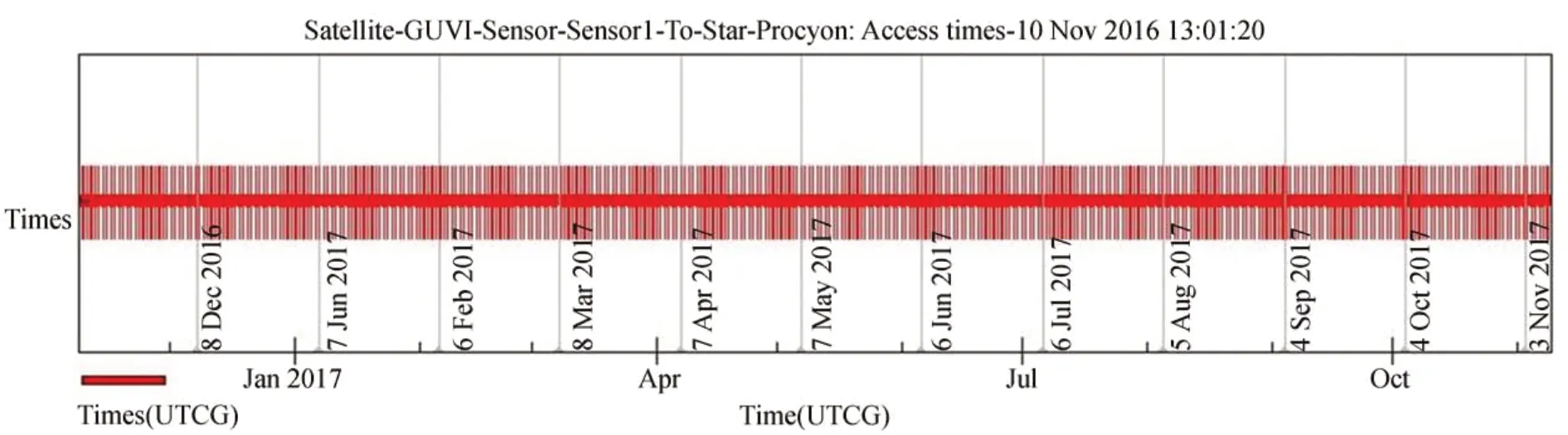
图12 南河三的年可见性分析Fig.12 Annual access analysis of Procyon
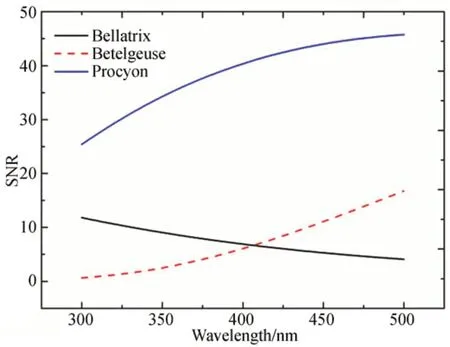
图13 可见恒星的信噪比分析Fig.13 Signal to noise analysis of visible stellars
4 不确定度分析
依据国际惯例对星上定标各模式进行了不确定度分析,结果如表3~表5 所示。根据国外太阳高精度测量仪器测得的在轨数据,及相关太阳模型得到250~500 nm 波段太阳标准光谱辐照度的不确定度为2%,日地距离变化引入的不确定为0.1%。为降低太阳活动周期的影响,这里采用与仪器定标时期相一致的太阳标准辐照度值,其不确定度可减小至1.50%,光谱定标引入的不确定度为0.50%。则δEsun为2.55%,仪器测量误差为1.41%。漫反射板不确定度采用实验室定标数据,即2.00%。太阳和恒星光阑系数实验室的测量不确定度为0.50%。
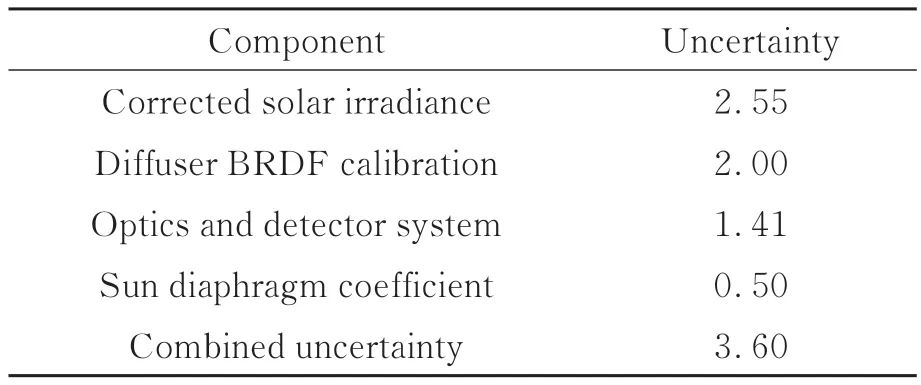
表3 静轨高光谱探测仪太阳定标不确定度Tab. 3 Uncertainty of solar calibration for GUVI(%)
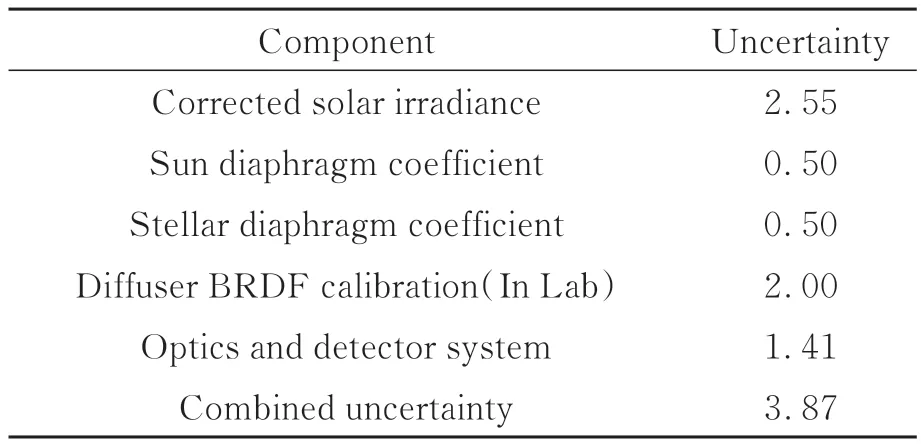
表4 静轨高光谱探测仪恒星定标不确定度Tab. 4 Uncertainty of stellar calibration for GUVI(%)
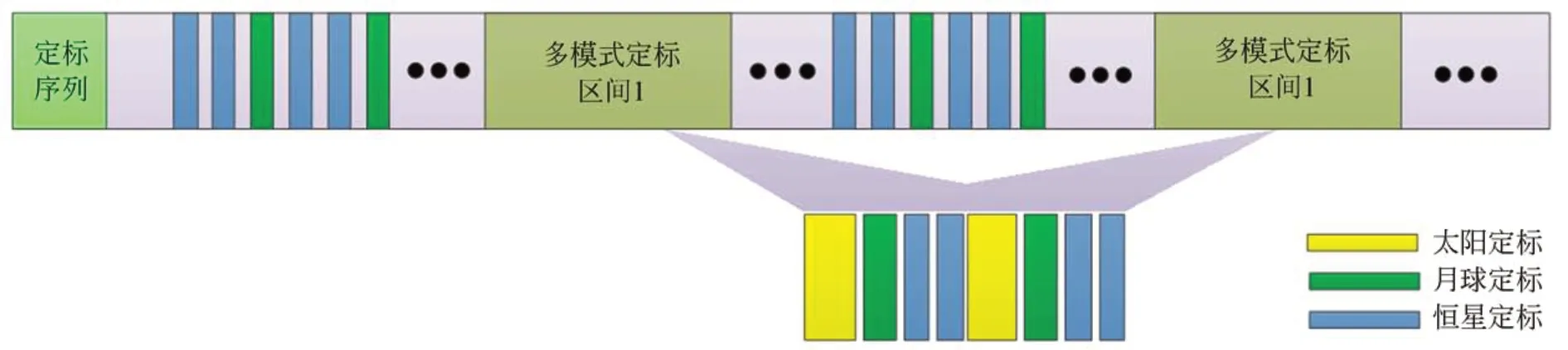
图14 紫外可见高光谱探测仪星上外定标序列Fig.14 External calibration schedule of GUVI
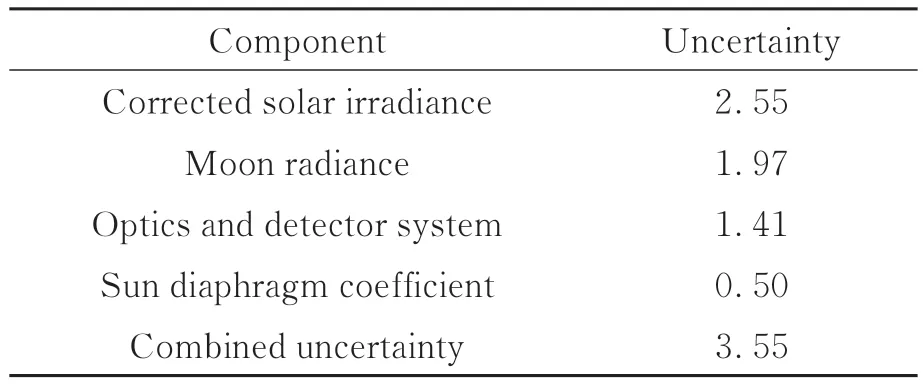
表5 漫反射板监测不确定度Tab. 5 Uncertainty of diffuser (%)
静轨紫外可见高光谱探测仪采用月球定标完成漫反射板衰减特性监测,每月在相同月相时进行定标,以降低月相变化对观测结果的影响,约为0.80%。月球天平动影响为1%,月球观测仪器的扫描精度误差为0.5%,仪器探测光路的测量误差为 1.41%[12]。
5 结 论
星上定标是实现遥感器在轨性能监测的重要手段,建立有效可行的星上定标方案是遥感器数据精细化应用的关键。本文通过分析太阳、月球、恒星等常用在轨全孔径定标基准源,确定了静轨紫外可见高光谱探测仪的星上外定标方案,其在轨不确定度均优于4%。其中,以月球完成漫反射板监测,是目前国内亟需研究的课题,特别是星上恒星定标研究,不仅为在轨辐射基准间比对校正奠定基础,同时对在轨点扩散函数测量等以恒星作为基准源的进一步应用具有重要意义。
